通用说明书工作原理
MQ系列气体传感器的敏感材料是活性很高的金属氧化物半导体,最常用的如SnO2。金属氧化物半导体在空气中被加热到一定温度时,氧原子被吸附在带负电荷的半导体表面,半导体表面的电子会被转移到吸附氧上,氧原子就变成了氧负离子,同时在半导体表面形成一个正的空间电荷层,导致表面势垒升高,从而阻碍电子流动(见图1。
在敏感材料内部,自由电子必须穿过金属氧化物半导体微晶粒的结合部位(晶界才能形成电流。由氧吸附产生的势垒同样存在于晶界而阻碍电子的自由流动,传感器的电阻即缘于这种势垒。在工作条件下当传感器遇到还原性气体时,氧负离子因与还原性气体发生氧化还原反应而导致其表面浓度降低,势垒随之降低(图2和图3。导致传感器的阻值减小。
在给定的工作条件下和适当的气体浓度范围内,传感器的电阻值和还原性气体浓度之间的关系可近似由下面方程表示:
其中:Rs:传感器电阻
A:常数
[C]:气体浓度
α:Rs曲线的斜率传感器特性
1氧气分压的影响
图4所示为大气中氧分压(PO2和MQ气体传感器在清洁空气中阻值之间的典型关系。
2气敏特性
根据前述方程,在某一气体浓度范围内(从几十ppm 至几千ppm,在工作条件下,传感器的电阻同气体浓度呈对数线性关系。如图5所示。
传感器对多种还原气体具有敏感性,对指定气体的相对灵敏度,取决于敏感材料的构成及其工作温
度。
图1-晶粒间势垒模型(洁净空气
实际上,每个传感器的电阻值和相对灵敏度都不完全相同,图5中描述的敏感特性为传感器在不同气体浓度下的阻值(Rs与待检测气体的一定浓度下的阻值(R0的比值与浓度的对数关系。
3传感器响应特性
在工作条件下传感器先被放入还原性气体中,其电阻急剧下降,待其稳定后,再将其置入洁净空气中,传感器的电阻经过很短的时间即恢复到它的初始值。这个过程中传感器典型的动作如图6所示。传感器的响应速度和恢复速度与传感器型号、材料种类及所测气体的种类相关。
4初始动作
如图7所示,当传感器不通电存放后,再在空气中通电,无论是否存在还原性气体,传感器通电后的最初几秒钟,其阻值都会(Rs急剧下降,然后逐渐达到一个平稳的水平,即为传感器的初始动作。初始动作时间的长短取决于传感器储存期间的气氛条件、储存时间长短,并因传感器型号而异,也与通电后传感器周围的氛围有关。通电后传感器的初始动作会引起报警(参照4-6节,因此在设计电路时要予以充分考虑。
5温、湿度影响
MQ传感器的检测原理是基于气体在传感器表面的化学吸附、反应与脱附。环境温度的变化会改变化学反应速度,从而影响传感器的敏感特性。此外,水蒸气会吸附在传感器表面,湿度将会引起Rs的降低。如图8所示。精确使用MQ传感器时应考虑温、湿度的影响。
6长期稳定性
MQ系列传感器的长期稳定性典型数据如图9所示。通常情况下,MQ传感器表现出稳定的经时特性,适用于免维护应用的场合。
7加热器电压的影响
在设计传感器的加热器时,充分考虑了在给定的恒定加热电压下,气体传感器表现出最佳的敏感特性。灵敏度随加热电压的变化如图10所示。对于加热电压对传感器性能的影响,使用时应充分考虑。MQ气体传感器使用注意事项
1必须避免的情况
1.1暴露于有机硅蒸气中
如果传感器的表面吸附了有机硅蒸气,传感器的敏感材料会被包裹住,抑制传感器的敏感性,并且不可恢复。传感器要避免暴露其在硅粘接剂、发胶、硅橡胶、腻子或其它含硅塑料添加剂可能存在
的地方。
图4-氧气分压的典型影响
图5-典型的敏感特性图6-典型的传感器响应恢复
1.2高腐蚀性的环境
传感器暴露在高浓度的腐蚀性气体(如H2S,SOX,Cl2,HCl等中,不仅会引起加热材料及传感器引线的腐蚀或破坏,并会引起敏感材料性能发生不可逆的改变。
1.3碱、碱金属盐、卤素的污染
传感器被碱金属尤其是盐水喷雾污染后,及暴露在卤素如氟中也会引起性能劣变。
1.4接触到水
溅上水或浸到水中会造成敏感特性下降。
1.5结冰
水在敏感元件表面结冰会导致敏感材料碎裂而丧失敏感特性。
1.6施加电压过高
如果给敏感元件或加热器施加的电压高于规定值,即使传感器没有受到物理损坏或破坏,也会造成引线和/或加热器损坏,并引起传感器敏感特性下降。
1.7电压加错管脚(仅限于旁热式系列
对6脚型的传感器,如果电压加在1、3或4、6管脚会导致引线断线,加在2、4管脚上则取不到信号
。2尽可能避免的情况
2.1凝结水
在室内使用条件下,轻微凝结水会对传感器性能会产生轻微影响。但是,如果水凝结在敏感元件表面并保持一段时间,传感器特性则会下降。
2.2处于高浓度气体中
无论传感器是否通电,在高浓度气体中长期放置,都会影响传感器特性。
2.3长期贮存
传感器在不通电情况下长时间贮存,其电阻会产生可逆性漂移,这种漂移与贮存环境有关。传感器应贮存在有清洁空气不含硅胶的密封袋中。经长期不通电贮存的传感器,在使用前需要长时间通电以使其达到稳定。
2.4长期暴露在极端环境中
无论传感器是否通电,长时间暴露在极端条件下,如高湿、高温、或高污染等极端条件,传感器性能将受到严重影响。
2.5振动
频繁、过度振动会导致敏感元件引线产生共振
图7-典型的初始动作
图8-典型的温湿度影响
图9-典型的长期稳定性
而断裂。在运输途中及组装线上使用气动改锥/超声波焊接机会产生这种振动。
2.6冲击
如果传感器受到强烈冲击会导致其引线断线。
2.7使用
对传感器来说手工焊接是最理想的焊接方式。使用波峰焊是应满足以下条件:
2.7.1助焊剂:含氯最少的松香助焊剂
2.7.2速度:1-2米/分钟
2.7.3预热温度:100±20℃
2.7.4焊接温度:250±10℃
2.7.51次通过波峰焊机
违反以上使用条件将使传感器特性下降。
电路设计
1负载电阻(RL
通过负载电阻可获得输出信号,并可调节传感器两端的电压,负载电阻可充当传感器的保护器。为每个传感器选择一个合适的负载电阻可补偿传感器的离散性,并发挥传感器的最佳特性。如图11为传感器常见的敏感特性。
在同样的电路(如图14中,传感器配用不同的负载电阻RL(4.7KΩ,2.0KΩ,1KΩ时,气体浓度与输出电压(VRL的关系如图12所示。
如图13给出了RS/RL和VRL/VC的关系。RS/RL为1.0时,VRL/VC的斜率最大。在此条件下对报警浓度可获得最佳信号分辨率。使用时应选择检测浓度下的RS/RL值为1.0时的RL作负载。也可使用可变电阻器(RL以获得最佳结果。
2信号处理
传统的信号输出处理方法是使用比较器(图14。当VRL超出设定值(Vref时,比较器信号激发外部装置,比如蜂鸣器或LED灯。使用微处理器进行信号处理会更方便实用。它除了具有执行比较器的功能外,还具有其它一些有用的功能,例如温度补偿,自动校准等。
3温度补偿电路
如图15所示为同一支传感器在几种不同环境条件下,典型的灵敏度曲线。没有补偿电路时,在+20℃/65%RH、1500ppm丙烷检测气体设定的报警点,在环境温度发生变化时会在600ppm至3400ppm间变化。
在给定的湿度条件下如:65%RH,使用热敏电阻可在一定程度上补偿温度影响,从而改变图14中的Vref。例如+40℃/65%RH下,Vref可从2.5V变化到3.1V,-
10℃/65%RH下,
Vref可从2.5V变化到1.
图10-典型的加热电压影响
图11-敏感特性(Rs
图12-敏感特性(VRL
9V。使用补偿电路的结果见图16及表1。
热敏电阻及附加电阻的选择方法如下:
3.1确定应用的预期环境温湿度范围。考虑平均值为+20℃/65%RH的通常条件以及-10℃和+40℃/40%—65%RH的极限条件。
3.2获取在上述环境条件下的待测气体的敏感特性曲线。
3.3决定热敏电阻和附加电阻去拟合平均曲线。图14中补偿路的推荐值如下:
注:使用这种方法不能实现湿度补偿。
4MQ300系列加热器突入电流
传感器的加热器材料有它自身的温度影响。MQ300系列传感器在不同环境温度下突入电流及加热器稳态电流如图17所示。此图说明突入电流大约比稳态电流高50%。因为加热器电阻在低温时电阻值也低,这会导致在室温下电流比预期高。因此使用该传感器的装置第一次通电时,通电的最初一段时间会产生极高的电流。因此在电路设计时要同时考虑突入电流时的保护。
5传感器加热器断路检测回路
传感器加热器的断路可通过与其串联的电阻检测出来。加在此串联电阻器上的电压可用于此目的。
6防止初始动作误报警
正如2-4部分所描述的那样,无论是否有被测气体出现,通电后最初的几秒内Rs 急剧下降,引起VRL 超过Vref,然后依照周围气氛趋向稳定(初始动作。使用图18所示的回路可以避免最初预热过程传感器初始动作可能引起的误报警。此回路应与传感器回路图14中的VRL连接。
7蜂鸣器延迟回路
使用类似于图18所示的延迟回路可以防止短暂存在的气体(如烹调中产生的乙醇蒸气干扰引发的误报警。
检测器设计(见图19示例流程图
1
电路
图13-Rs/RL和VRL/Vc的关系
图14-常用的温度补偿电路图15-无补偿电路的效果
1.1 使用热敏电阻补偿温度影响时,热敏电阻将补偿传感器周围发生的温度变化。传感器和热敏电阻要处于不受电路产生热量影响的位置才可以获得理想的补偿效果。 1.2 要确保传感器加热器的工作条件如电压,电流,加热周期和检测时间符合规定。 1.3 流过传感器的电流较大,在设计电路结构(如线条宽度,跨距和布局)时要充分考虑这一因素。 1.4 负载电阻值应接近报警点时传感器的电阻值。使用可调电阻时,应考虑它的可调范围。 1.5 电路功能应包括引线或加热器断路或传感器元件失效的故障/安全保护模式。 2 检测器外壳
2.1 外壳设计时传感器周围应有一个隔离空间。隔离间通过对流促进传感器快速响应,并使检测器中其它元件产生的热量对传感器的影响最小化。检测器外壳应至少在两面设置数量和宽度足够的切口,以保证气体在传感器周围顺畅流动。 2.2 外壳的设计时要最大限度地保证散热。 3 样机评审测验开始批量生产前必须对样机进行评审。检测器生产 1 生产设备 1.1 传感器和检测器的预热(预通电)设备,无论施加的电压是否波动,要持续施加额定周期下的额定电压。在预通电过程中,传感器/检测器要模拟
实际使用情况垂直固定。 1.2 气体测试箱避免使用熟化后可能放出气体的绝缘或密封材料,如硅树脂密封胶和溶剂型的粘合剂。气体测试箱的温、湿度应是可调的。要确保测试箱的容积使每个传感器拥有 1升或更多的空间。检测器探测到的应是静止的混合气,避免气体直接流向传感器,引起传感器错误地高灵敏。在调试过程中检测器要象实际使用时那样保持垂直固定。 1.3 工厂环境环境应保持清
洁并不得含有有机蒸气,如酒精、丙酮、可燃性气体等。特别要注意保持传感器/检测器预通电设备周围的环境中没有对其产生影响的气体,如含硅蒸气。在使用三氯乙烯,氟里昂或地板密封剂等挥发性清洗剂时,所有的产品要从该区域移走并妥善安置,直到该区域彻底通风后才可以返回。 2 制造工艺(制造工艺流程图示例如图-20) 2.1 传感器的贮存和处置传感器要在通常密封袋中贮存。 2.2 传感器预通电 6 郑州炜盛电子科技有限公司图16-补偿电路的效果图17-环境温度对MQ300加热电流的影响图18-防止初始动作引发报警电路
传感器预热(预通电)的时间最短为2天,但强烈建议通电7天或更长时间以获得最佳效果。通电时要遵循标准电路条件并保持清洁的气氛条件。 2.3 传感器装配到PCB上之前,助焊剂必须充分烘干。 2.4 传感器装配时强烈建议手工焊接。推荐使用无铅焊锡、不含氯的树脂助焊剂。 2.5 PCB预通电的时间最短为2
小时,但强烈推荐通电1天或更长时间以获得最佳效果。通电时要遵循标准电路条件并保持清洁的气氛条件。 2.6 调试(参考图14电路)确保使用适当的检测气体浓度来调试所有的产品。保持调试箱内气氛的温湿度条件稳定。必须清除调试箱中任何痕量的烟,粘接剂,杂质气体,溶剂。例1)使用可变负载电阻器调试检测器时,先将检测器放入气体测试箱。测试箱内配制报警浓度的被测气体。调整使检测气体中的VRL至与Vref相当。例2)使用虚设负载电阻器(RL*)调试检测器时,先将检测器放入气体测试箱。测试箱内配制报警浓度的气体。测量RL*两端的电压以获得报警浓度时的Rs。用相当于上述测量出的Rs阻值的RL来替换检测器中的RL*。注意:确认报警浓度的气体与周围环境的温湿度水平相一致。否则,调试结果会与正常使用时大不相同。要在用户规定的测试条件和检测器的预定使用条件下进行调试。 2.7 最终装配时要避免使用气动工具可能引起的任何冲击或振动。 2.8 成品预通电的时间最短为2小时,但强烈推荐通电1天或更长时间以获得最佳效果。确认通电时遵循标准电路条件并保持清洁的气氛条件。
2.9 气体测试用检测气体测试所有的最终成品。保持测试箱气氛条件稳定,使用用户规定的测试条件和检测器预期使用条件进行测试。必须清除测试箱中任何痕量的烟、粘接剂、杂质气体、溶剂。 2.10 气体测试不合格品的重新调试。如果电路功能检测没有问题,可以重新进行浓度调试。预通电时间应两倍于检测器测试后
的未通电放置时间,确保检测器充分稳定。重新设定不能超过 4次。 2.11 最终成品的贮存。检测器应保管在空气清洁的环境中。避免在不洁及有污染的环境中保存。前述部分所列出的注意事项同样适用。质量控制 7 郑州炜盛电子科技有限公司
1 对每个生产批次进行抽样以确认报警浓度准确。检查这些样品是否符合运输要求,并且保持这些测试记录。
2 周期性地对最终成品进行一定数量的抽样以确认极限条件下的报警浓度(如-10℃或+40℃/85% RH),并且保持这些测试记录。
3 周期性地对成品进行一定数量的抽样以确认长期稳定性。并且保持这些测试记录。 8 郑州炜盛电子科技有限公司
第7章 DS18B20温度传感器 7.1 温度传感器概述 温度传感器是各种传感器中最常用的一种,早起使用的是模拟温 度传感器,如热敏电阻,随着环境温度的变化,它的阻值也发生线性变化,用处理器采集电阻两端的电压,然后根据某个公式就可以计算出当前环境温度。随着科技的进步,现代的温度传感器已经走向数字化,外形小,接口简单,广泛应用在生产实践的各个领域,为我们的生活提供便利。随着现代仪器的发展,微型化、集成化、数字化、正成为传感器发展的一个重要方向。美国DALLS半导体公司推出的数字化温度传感器DS18B20采用单总线协议,即单片机接口仅需占用一个 I/O端口,无需任何外部元件,直接将环境温度转化为数字信号,以数码方式串行输出,从而大大简化了传感器与微处理器的接口。 7.2 DS18B20温度传感器介绍 DS18B20是美国DALLAS^导体公司继DS1820之后最新推出的一种改进型智能温度传感器。与传统的热敏电阻相比,他能够直接读出被测温度并且可根据实际要求通过简单的编程实现9?12位的数字 值读数方式。可以分别在93.75 ms和750 ms内完成9位和12位的数字量,并且从DS18B20读出的信息或写入 DS18B20的信息仅需要一根口线(单线接口)读写,温度变换功率来源于数据总线,总线本身也可以向所挂接的 DS18B20供电,而无需额外电源。因而使用
DS18B20可使系统结构更趋简单,可靠性更高。他在测温精度、转换时间、传输距离、分辨率等方面较 DS1820有了很大的改进,给用户带来了更方便的使用和更令人满意的效果。 1. DS18B20温度传感器的特性 ①独特的单线接口方式:DS18B20与微处理器连接时仅需要一条口 线即可实现微处理器与DS18B20勺双向通讯。 ②在使用中不需要任何外围元件。 ③可用数据线供电,电压范围:+3.0~ +5.5 V。 ④测温范围:-55 ~+125 C。固有测温分辨率为0.5 C。 ⑤通过编程可实现9~12位的数字读数方式。 ⑥用户可自设定非易失性的报警上下限值。 ⑦支持多点组网功能,多个 DS18B20可以并联在惟一的三线上,实现多点测温。 ⑧负压特性,电源极性接反时,温度计不会因发热而烧毁,但不能正常工作。 2. 引脚介绍 DS18B20有两种封装:三脚TO-92直插式(用的最多、最普遍的封装)和八脚SOIC贴片式。下图为实验板上直插式 DS18B20的原理图。 3. 工作原理 单片机需要怎样工作才能将DS18B2 0中的温度数据独取出来呢?F面将给出详细分析
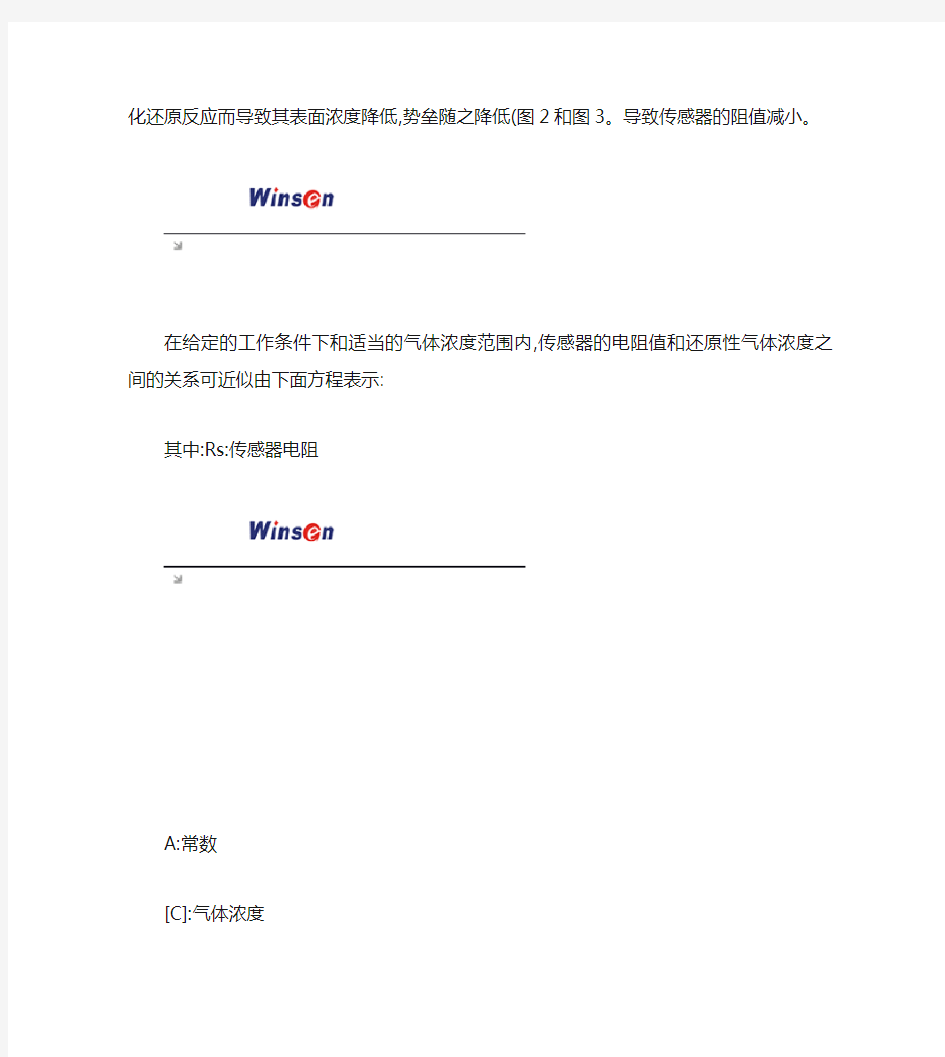
'4 &, ????????????FS500EK1 Hall-effect Current Sensor Series ??????????????????????????????????ф????????????ǎ Open loop current sensor based on the principle of Hall-effect. It can be used for measuring AC,DC,pulsed and mi. ?????1,+15V 2,-15V 3,V out 4,0V(???) OFS,????GIN,???? Elucidation: 1:+15V 2:–15V 3: VOUT 4:0V(GND) OFS:Zero adjustment GIN:Gain adjustment ????/Remarks 1???????????????ǎ????????????????????????????????????ǎ2???????????????????????ǎ 3??????????????К???????????ǎ·Incorrect connection may lead to the damage of the sensor. ·VOUT is positive when the IP flows in the direction of the arrow. ???/Electrical characteristics ??Type ?????К?? Primary nominal input current ???????? Measuring range of primary current ????????Nominal output voltage ???? Supply voltage ???? Current consumption ???? Insulation voltage ???Linearity ??????Offset voltage ?????Residual voltage ??????Thermal drift of V0???? Response time ????(-3dB) Frequency bandwidth(-3dB) ?????? Ambient operating temperature ?????? Ambient storage temperature ???? Load resistance ?юStandard FS050EK1FS100EK1 FS200EK1 FS300EK1FS400EK1 FS500EK1 50 100 200 300 400 5000~±100 0~±200 0~±400 0~±600 0~±800 0~±1000 4±1%±12~±15(±5%) V C =±15V <25 ??????????2 .5KV ???/50Hz/1?? <1 T A =25℃ I PN ? I P =0 T A =-25?+85? <±1 DC ?20-25?+85 .GI/FS-0105 -40?+100A A V V mA %FS mV mV mV/℃?V kHz ℃℃??????mm ?/Dimensions of drawing (mm) I PN I P V OUT V C I C V d ?L V 0V OM V OT Tr f T A T S R L 5 electronics
传感器分类 传感器有许多分类方法,但常用的分类方法有两种,一种是按被测物理量来分;另一种是按传感器的工作原理来分。 按被测物理量划分的传感器,常见的有:温度传感器、湿度传感器、压力传感器、位移传感器、流量传感器、液位传感器、力传感器、加速度传感器、转矩传感器等。 按工作原理可划分为: 1.电学式传感器 电学式传感器是非电量电测技术中应用范围较广的一种传感器,常用的有电阻式传感器、电容式传感器、电感式传感器、磁电式传感器及电涡流式传感器等。 电阻式传感器是利用变阻器将被测非电量转换为电阻信号的原理制成。电阻式传感器一般有电位器式、触点变阻式、电阻应变片式及压阻式传感器等。电阻式传感器主要用于位移、压力、力、应变、力矩、气流流速、液位和液体流量等参数的测量。 电容式传感器是利用改变电容的几何尺寸或改变介质的性质和含量,从而使电容量发生变化的原理制成。主要用于压力、位移、液位、厚度、水分含量等参数的测量。 电感式传感器是利用改变磁路几何尺寸、磁体位置来改变电感或互感的电感量或压磁效应原理制成的。主要用于位移、压力、力、振动、加速度等参数的测量。 磁电式传感器是利用电磁感应原理,把被测非电量转换成电量制成。主要用于流量、转速和位移等参数的测量。 电涡流式传感器是利用金屑在磁场中运动切割磁力线,在金属内形成涡流的原理制成。主要用于位移及厚度等参数的测量。
2.磁学式传感器 磁学式传感器是利用铁磁物质的一些物理效应而制成的,主要用于位移、转矩等参数的测量。 3.光电式传感器 光电式传感器在非电量电测及自动控制技术中占有重要的地位。它是利用光电器件的光电效应和光学原理制成的,主要用于光强、光通量、位移、浓度等参数的测量。 4.电势型传感器 电势型传感器是利用热电效应、光电效应、霍尔效应等原理制成,主要用于温度、磁通、电流、速度、光强、热辐射等参数的测量。 5.电荷传感器 电荷传感器是利用压电效应原理制成的,主要用于力及加速度的测量。 6.半导体传感器 半导体传感器是利用半导体的压阻效应、内光电效应、磁电效应、半导体与气体接触产生物质变化等原理制成,主要用于温度、湿度、压力、加速度、磁场和有害气体的测量。 7.谐振式传感器 谐振式传感器是利用改变电或机械的固有参数来改变谐振频率的原理制成,主要用来测量压力。 8.电化学式传感器 电化学式传感器是以离子导电为基础制成,根据其电特性的形成不同,电化学传感器可分为电位式传感器、电导式传感器、电量式传感器、极谱式传感器和电解式传感器等。电化学式传感器主要用于分析气体、液体或溶于液体的固体成分、液体的酸碱度、电导率及氧化还原电位等参数的测量。
#include
for(i=60;i>0;i--); return(DQ); for(i=200;i>0;i--); } void writecommandtods18b20(unsigned char command) { unsigned char i; unsigned char j; for(i=0;i<8;i++) { if((command & 0x01)==0) { DQ=0; for(j=35;j>0;j--); DQ=1; } else { DQ=0; for(j=2;j>0;j--); DQ=1; for(j=33;j>0;j--); } command=_cror_(command,1); } }
传感器的种类 传感器有许多分类方法,但常用的分类方法有两种,一种是按被测物理量来分;另一种是按传感器的工作原理来分。按被测物理量划分的传感器,常见的有:温度传感器、湿度传感器、压力传感器、位移传感器、流量传感器、液位传感器、力传感器、加速度传感器、转矩传感器等。 按工作原理可划分为: 1.电学式传感器 电学式传感器是非电量电测技术中应用范围较广的一种传感器,常用的有电阻式传感器、电容式传感器、电感式传感器、磁电式传感器及电涡流式传感器等。 电阻式传感器是利用变阻器将被测非电量转换为电阻信号的原理制成。电阻式传感器一般有电位器式、触点变阻式、电阻应变片式及压阻式传感器等。电阻式传感器主要用于位移、压力、力、应变、力矩、气流流速、液位和液体流量等参数的测量。 电容式传感器是利用改变电容的几何尺寸或改变介质的性质和含量,从而使电容量发生变化的原理制成。主要用于压力、位移、液位、厚度、水分含量等参数的测量。 电感式传感器是利用改变磁路几何尺寸、磁体位置来改变电感或互感的电感量或压磁效应原理制成的。主要用于位移、压力、力、振动、加速度等参数的测量。 磁电式传感器是利用电磁感应原理,把被测非电量转换成电量制成。主要用于流量、转速和位移等参数的测量。 电涡流式传感器是利用金屑在磁场中运动切割磁力线,在金属内形成涡流的原理制成。主要用于位移及厚度等参数的测量。 2.磁学式传感器 磁学式传感器是利用铁磁物质的一些物理效应而制成的,主要用于位移、转矩等参数的
测量。 3.光电式传感器 光电式传感器在非电量电测及自动控制技术中占有重要的地位。它是利用光电器件的光电效应和光学原理制成的,主要用于光强、光通量、位移、浓度等参数的测量。 4.电势型传感器 电势型传感器是利用热电效应、光电效应、霍尔效应等原理制成,主要用于温度、磁通、电流、速度、光强、热辐射等参数的测量。 5.电荷传感器 电荷传感器是利用压电效应原理制成的,主要用于力及加速度的测量。 6.半导体传感器 半导体传感器是利用半导体的压阻效应、内光电效应、磁电效应、半导体与气体接触产生物质变化等原理制成,主要用于温度、湿度、压力、加速度、磁场和有害气体的测量。 7.谐振式传感器 谐振式传感器是利用改变电或机械的固有参数来改变谐振频率的原理制成,主要用来测量压力。 8.电化学式传感器 电化学式传感器是以离子导电为基础制成,根据其电特性的形成不同,电化学传感器可分为电位式传感器、电导式传感器、电量式传感器、极谱式传感器和电解式传感器等。电化学式传感器主要用于分析气体、液体或溶于液体的固体成分、液体的酸碱度、电导率及氧化还原电位等参数的测量。 另外,根据传感器对信号的检测转换过程,传感器可划分为直接转换型传感器和间接转换型传感器两大类。前者是把输入给传感器的非电量一次性的变换为电信号输出,如光敏电
霍尔电流传感器的种类及工作原理 1.简介 霍尔电流传感器可以分为很多种,如果按照原理可以分为开环霍尔电流传感器(Open Loop Hall Effect)和闭环霍尔电流传感器(Close Loop Hall Effect)。基于开环原理的电流传感器结构简单,可靠性好,过载能力强,体积较小,但也有很多缺点,如温度影响大,精度低,反应时间不够快,频带宽度窄等。而闭环霍尔电流传感器等特点是精度高,响应快,频带宽,但同时也有缺点,即过载能力差,体积较大,工艺比较复杂,同时价格也偏高。 1原理图如下: 开环原理霍尔电流传感器示意图 闭环原理霍尔电流传感器示意图 2 霍尔电流传感器的工作原理 霍尔电流传感器可以测量各种类型的电流,从直流电到几十千赫兹的交流电,其所依据的工作原理主要是霍尔效应原理。 1图片来自PAS 网站
2.1 电流传感 器的输出信号 2当原边导线经过电 流传感器时,原边电流IP 会产生磁力线,原边磁力 线集中在磁芯气隙周围, 内置在磁芯气隙中的霍尔 电片可产生和原边磁力线 成正比的,大小仅为几毫伏的感应电压,通过后续电子电路可把这个微小的信号转变成副边电流IS,并存在以下关系式:IS*NS= IP*NP。其中,IS—副边电流;IP—原边电流;NP—原边线圈匝数;NS —副边圈匝数;NP / NS—匝数比,一般取NP=1。 电流传感器的输出信号是副边电流IS,它与输入信号(原边电流IP)成正比,IS 一般小,只有10~400mA。如果输出电流经过测量电阻RM,则可以得到一个与原边电流成正比的大小为几伏的电压输出信号。 2.2 电流传感器供电电压V A V A指电流传感器的供电电压,它必须在传感器所规定的范围内。超过此范围,传感器不能正常工作或可靠性降低。另外,传感器的供电电压V A又分为正极供电电压V A+和负极 供电电压V A-。要注意单相供电的传感器,其供电电压V Amin是双相供电电压V Amin 的2倍,所以其测量范围要高于双相供电的传感器。 2.3 测量范围Ipmax 测量范围指电流传感器可测量的最大电流值,测量范围 一般高于标准额定值I 。 2.4霍尔电流传感器工作原理 霍尔电流传感器可以测量各种类型的电流,从直流电到几十千赫兹的交流电,其所依据的工作原理主要是霍尔效应原理。它有两种工作方式,即磁平衡式和直式。霍尔电流传感器一般由原边电路、聚磁环、霍尔器件、(次级线圈)和放大电路等组成。 直放式电流传感器(开环式):当电流通过一根长导线时,在导线周围将产生一磁场,这一磁场的大小与流过导线的电流成正比,它可以通过磁芯聚集感应到霍尔器件上并使其有一信号输出。这一信号经信号放大器放大后直接输出,一般的额定输出标定为4V。 磁平衡式电流传感器(闭环式):磁平衡式电流传感器也称补偿式传感器,即主回路被测电流Ip在聚磁环处所产生的磁场通过一个次级线圈,电流所产生的磁场进行补偿,从而使霍尔器件处于检测零磁通的工作状态。当原边导线经过电流传感器时,原边电流IP会产生磁力线,原边磁力线集中在磁芯气隙周围,内置在磁芯气隙中的霍尔电片可产生和原边磁力线成正比的,大小仅为几毫伏的感应电压,通过后续电子电路可把这个微小的信号转变成副边电流IS,并存在以下关系式: IS* NS= IP*NP。(其中,IS—副边电流;IP—原边电流;NP—原边线圈匝数;NS—副边线圈匝数;NP/NS—匝数比,一般取NP=1。)磁平衡式电流传感器的具体工作过程为:当主回路有一电流通过时,在导线上产生的磁场被聚磁环聚集并感应到霍尔器件上,所产生的信号输出用于驱动相应的功率管并使其导通,从而获得一个补偿电流Is。这一电流再通过多匝绕组产生磁场,该磁场与被测电流产生的磁场正好相反,因而补偿了原来的磁场,使霍尔器件的输出逐渐减小。当与Ip 2董高峰《浅析霍尔电流传感器的应用》
第7章DS18B20温度传感器 7.1 温度传感器概述 温度传感器是各种传感器中最常用的一种,早起使用的是模拟温度传感器,如热敏电阻,随着环境温度的变化,它的阻值也发生线性变化,用处理器采集电阻两端的电压,然后根据某个公式就可以计算出当前环境温度。随着科技的进步,现代的温度传感器已经走向数字化,外形小,接口简单,广泛应用在生产实践的各个领域,为我们的生活提供便利。随着现代仪器的发展,微型化、集成化、数字化、正成为传感器发展的一个重要方向。美国DALLS半导体公司推出的数字化温度传感器DS18B20采用单总线协议,即单片机接口仅需占用一个I/O端口,无需任何外部元件,直接将环境温度转化为数字信号,以数码方式串行输出,从而大大简化了传感器与微处理器的接口。7.2 DS18B20温度传感器介绍 DS18B20是美国DALLAS半导体公司继DS1820之后最新推出的一种改进型智能温度传感器。与传统的热敏电阻相比,他能够直接读出被测温度并且可根据实际要求通过简单的编程实现9~12位的数字值读数方式。可以分别在93.75 ms和750 ms内完成9位和12位的数字量,并且从DS18B20读出的信息或写入DS18B20的信息仅需要一根口线(单线接口)读写,温度变换功率来源于数据总线,总线本身也可以向所挂接的DS18B20供电,而无需额外电源。因而使用
DS18B20可使系统结构更趋简单,可靠性更高。他在测温精度、转换时间、传输距离、分辨率等方面较DS1820有了很大的改进,给用户带来了更方便的使用和更令人满意的效果。 1.DS18B20温度传感器的特性 ①独特的单线接口方式:DS18B20与微处理器连接时仅需要一条口线即可实现微处理器与DS18B20的双向通讯。 ②在使用中不需要任何外围元件。 ③可用数据线供电,电压范围:+3.0~ +5.5 V。 ④测温范围:-55 ~+125 ℃。固有测温分辨率为0.5 ℃。 ⑤通过编程可实现9~12位的数字读数方式。 ⑥用户可自设定非易失性的报警上下限值。 ⑦支持多点组网功能,多个DS18B20可以并联在惟一的三线上,实现多点测温。 ⑧负压特性,电源极性接反时,温度计不会因发热而烧毁,但不能正常工作。 2.引脚介绍 DS18B20有两种封装:三脚TO-92直插式(用的最多、最普遍的封装)和八脚SOIC贴片式。下图为实验板上直插式DS18B20的原理图。 3.工作原理 单片机需要怎样工作才能将DS18B20中的温度数据独取出来呢?下面将给出详细分析。
霍尔电流传感器电源消耗电流计算方案 霍尔电流传感器由于具有精度高、线性好、频带宽、响应快、过载能力强和无插入损耗等诸多优点,因而被广泛应用于变频器、逆变器、电源、电焊机、变电站、电解电镀、数控机床、微机监测系统、电网监控系统和需要隔离检测的大电流、电压等各个领域中。霍尔传感器需用到直流电源供电才可正常工作,在做产品设计时需要考虑其功率消耗,本文基于传统的霍尔电流传感器,精确计算其电流消耗,并利用LTspice软件进行仿真,所推导的理论计算公式可为产品设计提供参考。 霍尔电流传感器工作原理 从工作原理上,霍尔电流传感器可以分为霍尔开环电流传感器和霍尔闭环电流传感器。 ●霍尔开环电流传感器 图1 霍尔开环电压传感器的工作原理 霍尔传感器的磁芯使用软磁材料,原边电流产生磁场通过磁芯聚磁,在磁芯切开一个均匀的切口,磁芯气隙处磁感应强度与原边电流成正比,霍尔元件两端感应到的霍尔电压的大小与原边电流及流过霍尔元件电流的乘积成正比,霍尔电压经过放大后作为传感器的输出。其输出关系式满足: VOUT=K*IP*IHall 其中K为固定的常数,其大小通常与磁芯的尺寸,材料性质,气隙开口的宽度,以及处理电路的放大倍数有关。 ●霍尔闭环电流传感器的工作原理: 闭环电流传感器在开环的基础上增加了反馈线圈,霍尔元件两端感应到的霍尔电流经过放大后控制后端的三极管电路产生补偿电流,补偿电路流过缠绕在磁芯上的线圈,产生的磁场与原边电流产生的磁场方向相反,当磁芯气隙处的磁场强度补偿为0时,传感器的输出满足IS=IP/KN,其中KN为补偿线圈的匝数。
图2 霍尔闭环电压传感器的工作原理 传感器的功耗计算 ●开环电流传感器的功耗计算 对于开环电流传感器,因为其输出信号为电压,所以其功耗相对较为稳定。通常霍尔电流传感器的电流设计为采用正负电源供电,其额定输出电压一般为几伏,一般不超过10伏。输出端对负载的要求一般为大于10KΩ,所以流过负载的电流一般小于1个mA。通常开环传感器的电流消耗小于15mA。电流消耗主要是霍尔元件消耗的电流,流入霍尔元件两端的电流通常要求小于20mA,LEM 的产品霍尔电流通常在10mA左右。另外在调压支路还有几mA的电流消耗。这样开环传感器的电流消耗可以维持在十几mA的水平内,通常说明书上标的都是不超过15mA。 ●闭环电流传感器的功耗计算 闭环传感器输出信号为电流,其功耗相对于开环传感器多很多,下面以LF 205-S为例来分析闭环电流传感器的电流消耗。 图3为LF 205-S的原理示意 图4为LF205-S原理图
变压器感应电势公式中“4.44”的由来 《电网进网作业许可证考试参考教材.高压理论部分》第二章讲,根据电磁感应定律, 一次侧绕组感应电势为: E1= 4.44 ? Ν1фm(1) 二次侧绕组感应电势为: E2= 4.44 ? Ν2фm(2) 其它部分我们不补充了,单说系数““4.44” 的由来。 我们学习技术的时候不能死记,有一点疑 问就要想出来:为什么是“4. 44”呢?简单 地说,和有效值有关,但我们要更深一步,了解电磁感应原理了。 看右图。根据法拉第电磁感应定律,电路中感应电动势的大小,跟穿过这一电路的磁通变化率成正比。写成公式就是: 这是微分式,用普及式可表示为: “Δ”表示增量,或变化量。“e”是感应电动势,“N”是线圈匝数,“ф”是主磁通,“t”是时间。此式说明,电路中感应电动势的大小,跟穿过这一电路的磁通变化率成正比。也就是磁力线切割线圈越快,感应电动势越高。用“-”号表示感应电动势与输入电压方向相反。图一假定变压器是空载的,在左侧一次绕组N1输入电压、流过空载电流、建立空载磁场,产生主磁通Фm(Фm是交变磁通的最大值,具有交变性质,符号上边应点圆点,字库没有此种字型),通过铁芯磁路,与一次、二次线圈全部匝数交链,分别产生感应电动势E1、E2,于是,式2可以分别表示一次、二次线圈感应电动势为: e1、 e2分别为一次、二次线圈感应电动势的瞬时值 假定主磁通Фm按正弦规律变化,把微分计算出来: dФ/dt=d(Фmsin(ωt)/dt=Фmωcos(ωt) ,并考虑Em =√2E ,式3变为: e1=-N1·dФ/dt=-N1ωФm cosωt=-Em1cosωt
传感器代号 代号:依次为主称(传感器)被测量—转换原理—序号 ①主称——传感器代号C ②被测量—用一个或两个汉语拼音的第一个大写字母标记。 ③转换原理——用一个或两个汉语拼音的第一个大写字母标记。 ④序号——用一个阿拉伯数字标记,厂家自定,用来表征产品设计特性、性能参数、产品系列等。若产品性能参数不变,仅在局部有改动或变动时,其序号可在原序号后面顺序地加注大写字母A、B、C等,(其中I、Q不用) 例: 应变式位移传感器:C WY-YB-20 光纤压力传感器:C Y-GQ-2 常用被测量代码表 被测量被测量简称代号被测量被测量简称代号 加速度 加加速度 亮度 细胞膜电位 磁 冲击 磁透率 磁场强度 磁通量 胆固醇 呼吸频率 转速 生物化学需氧量硬度 线加速度 心电[ 图] 线速度 心音 角度 角加速度 肌电[ 图] 可见光 角速度 角位移 力 露点 力矩 流量 离子 密度 [ 气体] 密度加 加加 胞电 磁透 磁强 磁通 胆固 呼吸 生氧 线加 心电 线速 角 角加 肌电 角速 [ 气] 密 [ 液] 密 马赫 粘 脑电 厚 葡糖 气 热通 视电 射量 蚀厚 A AA AD BD C CJ CO CQ CT DC HP HS HY I IA ID IS IY J JA JD JG JS JW L LD LJ LL LZ M [Q]M 电流 电场强度 电压 色度 谷氨酸 温度 照度 红外光 呼吸流量 () 离子活 [ 浓] 度 声压 图像 温度 [ 体] 温 物位 位移 位置 血 血液电解质 血流 血气 血容量 血流速度 血型 压力 膀胱内压 胃肠内压 颅内压 食道压力 [ 分] 压 电强 色 谷氨 红外 呼流 活[ 浓] 血电 血容 血速 压 [ 膀] 压 [ 胃] 压 [ 颅] 压 [ 食] 压 眼电 浊 紫光 真空 H + Na + Cl - O 2 CO DL DQ DY E GA H HD HG HL ()H[N] SY TX W [T]W WW WY WZ X XD XL XQ XR XS XX Y [B]Y [E]Y [L]Y ?敎?潒慭n [S]Y [F]Y
1、开环(直放式)霍尔电流传感器 当原边电流I P流过一根长导线时,在导线周围将产生一磁场,这一磁场的大小与流过导线的电流成正比,产生的磁场聚集在磁环内,通过磁环气隙中霍尔元件(如HG-302C)进行测量并放大输出,其输出电压V S精确的反映原边电流I P。一般的额定输出标定为4V。开环霍尔电流传感器的优点是结构简单,可靠性好,过载能力强,体积较小,开环式霍尔电流传感器一般线性度角差,且原边信号在上升和下降过程中副边输出会有不同。开环式霍尔电流传感器精度通常劣于1%。?一般开环电流传感器采用的霍尔是 HG-106A,HG-106C,HG-166A,HG-302A,HG-302C,HG-362A,SS495A,SS495A1。 2、闭环(磁平衡式)霍尔电流传感器 磁平衡式电流传感器也称补偿式传感器,即原边电流Ip在聚磁环处所产生的磁场通过一个次级线圈电流所产生的磁场进行补偿,其补偿电流Is精确的反映原边电流Ip,从而使霍尔器件(如HW-300B,HW-302B)处于检测零磁通的工作状态。 当主回路有一电流通过时,在导线上产生的磁场被磁环聚集并感应到霍尔器件上,所产生的信号输出用于驱动功率管并使其导通,从而获得一个补偿电流Is。这一电流再通过多匝绕组产生磁场,该磁场与被测电流产生的磁场正好相反,因而补偿了原来的磁场,使霍尔器件的输出逐渐减小。当与Ip与匝数相乘所产生的磁场相等时,Is不再增加,这时的霍尔器件起到指示零磁通的作用,此时可以通过Is来测试Ip。当Ip变化时,平衡受到破坏,霍尔器件有信号输出,即重复上述过程重新达到平衡。被测电流的任何变化都会破坏这一平衡。一旦磁场失去平衡,霍尔器件(HW-300B,HW-302B)就有信号输出。经功率放大后,立即就有相应的电流流过次级绕组以对失衡的磁场进行补偿。从磁场失衡到再次平衡,所需的时间理论上不
数控车床坐标轴故障维修实例 摘要:数控车床的坐标轴故障,是数控车床中常见和最主要的故障。本文所叙述的肖伯林(SCHAUBLIN)数控车床坐标轴故障的维修实例,较详细地介绍了故障产生的原因,现象以及维修、调试过程。它从一个侧面反映了该类机床坐标轴常见故障的一般规律和具体的维修试验方法,具有一定的代表意义。 关键词:数控车床;坐标轴;故障 瑞士SCHAUBLIN数控车床的主要控制单元采用日本FANUC公司的OTC-CNC系统、交流主轴驱动和交流伺服单元以及PLC可编程控制器,主要电气元件均为德国和欧洲国家的产品。 我们在该类机床的维修工作中曾碰到了几例由于坐标位置传感器损坏(或性能不良),或 坐标基准改变而引起的故障。现将故障排除过程介绍如下。 1由于坐标位置传感器损坏(性能劣化)而引发的机床故障 故障现象:开动机床走参考点时,出现510#报警(该报警号为FANUC系统报警,提示内容为+X方向超程)。 经现场检查,当机床开机走参考点时,经常发生刀架向+X方向运动,尚未到达极限位置 时(CRT显示尚有12mm左右距离)系统就出现510#报警,向-X方向运动时,则未出现过此类报警。 根据经验分析,出现这类报警,一般均与该坐标的位置传感器有关。而故障的报警提示为+X方向超程,因此应把检查的重点放在+X方向和X参考点两个位置传感器的工作状态上。 有关X坐标各位置传感器代码详见表1。 表1 X坐标各位置传感器代码一览表 传感器名称缩写传感器编号 PLC中的I/O代码对应的接线端子 +X极限 +X S B 148 X 3073.7 X 95.4 -X极限 -X S B 145 X 3073.6 X 95.3 X参考点 Refx S B 150 X 3073.1 X 95.5 首先我们可打开机床后部的电气控制箱,找到输入/输出接口组件(机床图册中编号为A132的部件),然后由一人运行机床,另一人观察该组件的显示。可观察到当向+X方向运行时,X3073.7为常亮,到达+X极限位置时,闪烁一下后又常亮;而向-X方向运行机床时,X3073.6的情况与X3073.7相类似;而X参考点传感器SB150(X3073.1)在向X两个方向运动机床时始终不亮,且偶然出现过无规则闪烁。据此可初步判断出SB150工作可能异常。 为了进一步确定故障,我们将位于机床正面工作仓中溜板滑枕上的下端盖板打开,可看 到接线端子X95(由于X轴的三个传感器均安装在其端部的另一仓盒内,不便直接观察,故由接线端子X95测量其工作电压较为方便)。 X95的接线情况如图1所示。 首先用万用表测其1、2两点,得知传感器工作电压为DC24V正常。而后在机床运动状态下分别测量X95.3和X95.4及X95.5三点相对于X95.2的电压。结果发现仍如前所述,即X95.3
霍尔电流传感器工作原理 1、直放式(开环)电流传感器(CS系列) 当原边电流I P流过一根长导线时,在导线周围将产生一磁场,这一磁场的大小与流过导线的电流成正比,产生的磁场聚集在磁环内,通过磁环气隙中霍尔元件进行测量并放大输出,其输出电压V S精确的反映原边电流I P。一般的额定输出标定为4V。 2、磁平衡式(闭环)电流传感器(CSM系列) 磁平衡式电流传感器也称补偿式传感器,即原边电流Ip在聚磁环处所产生的磁场通过一个次级线圈电流所产生的磁场进行补偿,其补偿电流Is精确的反映原边电流Ip,从而使霍尔器件处于检测零磁通的工作状态。 具体工作过程为:当主回路有一电流通过时,在导线上产生的磁场被磁环聚集并感应到霍尔器件上,所产生的信号输出用于驱动功率管并使其导通,从而获得一个补偿电流Is。这一电流再通过多匝绕组产生磁场,该磁场与被测电流产生的磁场正好相反,因而补偿了原来的磁场,使霍尔器件的输出逐渐减小。当与Ip与匝数相乘所产生的磁场相等时,Is不再增加,这时的霍尔器件起到指示零磁通的作用,此时可以通过Is来测试Ip。当Ip变化时,平衡受到破坏,霍尔器件有信号输出,即重复上述过程重新达到平衡。被测电流的任何变化都会破坏这一平衡。一旦磁场失去平衡,霍尔器件就有信号输出。经功率放大后,立即就有相应的电流流过次级绕组以对失衡的磁场进行补偿。从磁场失衡到再次平衡,所需的时间理论上不到1μs,这是一个动态平衡的过程。因此,从宏观上看,次级的补偿电流安匝数在任何时间都与初级被测电流的安匝数相等。 3、霍尔电压(闭环)传感器(VSM系列)
霍尔电压传感器的工作原理与闭环式电流传感器相似,也是以磁平衡方式工作的。原边电压VP通过限流电阻Ri产生电流,流过原边线圈产生磁场,聚集在磁环内,通过磁环气隙中霍尔元件输出信号控制的补偿电流IS流过副边线圈产生的磁场进行补偿,其补偿电流IS精确的反映原边电压VP。 4、交流电流传感器(A-CS系列) 交流电流传感器主要测量交流信号灯电流。是将霍尔感应出的交流信号经过AC-DC及其他转换,变为0~4V、0~20mA(或4~20mA)的标准直流信号输出供各种系统使用。 . .
H006AHKC-HB系列开口式霍尔电流传感器V1.0 1.产品概述 AHKC-HB系列开口式霍尔电流传感器是应用霍尔效应原理开发的新一代电流传感器,能在电隔离条件下测量直流、交流、脉冲以及各种不规则波形的电流。 2.技术参数及外形尺寸 参数指标 额定输入电流±2000~±20000A 额定输出电压±5V/±4V 准确级 1.0 电源电压DC±15V(允许波动±20%) 零点失调电压±20mV 失调电压漂移≤±1.0mV/℃ 线性度≤0.2%FS 响应时间≤5us 频宽0~20kHz 绝缘电压 2.5kV/50Hz/1min 工作温度-40℃~85℃ 储存温度-40℃~85℃ 功耗≤0.5W
3.安装方式 4.接线方式 +15V——电源+15V -15V——电源-15V(注意电源正极与负极不可接反) M ——信号输出端正极G ——电源地与信号输出端负极 注:具体接线按实物外壳上的端子编号为准。 5.注意事项 1、霍尔传感器在使用时,为了得到较好的动态特性和灵敏度,必须注意原边线圈和副边线圈之间的耦合,建议使用单根导线且导线完全填满霍尔传感器模块过线孔; 2、霍尔传感器在使用时,在额定输入电流值下才能得到最佳的测量精度,当被测电流远低于额定值时,若要获得最佳精度,原边可使用多匝,即:IpNp=额定安匝数。另外,原边馈线温度不应超过80℃; 3、霍尔电流传感器正常工作时的辅助电源不应超过标定值的±20%;螺丝固定在母排上+15V -15V M G +15V GND -15V 辅助电源信号输出 AO GND
4、霍尔电流传感器在安装使用过程中严禁从高处摔落(≥1m); 5、不能调节零点、满度调节电位器; 6、辅助电源需要自行配置; 7、电源正负极不能接反。 6.订货范例 例1:AHKC-HB霍尔电流传感器 辅助电源:DC±15V 输入:5000A 输出:5V 精度:1级 7、霍尔电流传感器适用场合 霍尔电流传感器主要适用于交流、直流、脉冲等复杂信号的隔离转换,通过霍尔效应原理使变换后的信号能够直接被AD、DSP、PLC、二次仪表等各种采集装置直接采集,广泛应用于电流监控及电池应用、逆变电源及太阳能电源管理系统、直流屏及直流马达驱动、电镀、焊接应用、变频器,UPS伺服控制等系统电流信号采集和反馈控制,具有响应时间快,电流测量范围宽精度高,过载能力强,线性好,抗干扰能力强等优点。
《传感器分类与代码》 国家标准(征求意见稿)编制说明 一、任务来源 国家标准《传感器分类与代码》由中国标准化研究院提出,2013年列入国家标准委国家标准制、修订计划,计划号为-T-469。本标准由全国信息分类与编码标准化技术委员会(TC353)归口,由中国标准化研究院负责组织起草工作。 二、背景及意义 传感器是一种能把特定的被测信号,按一定规律转换成某种可用信号输出的器件或装置,以满足信息的传输、处理、记录、显示和控制等要求。传感器位于物联网的感知层,可以独立存在,也可以与其他设备以一体方式呈现,是物联网中感知、获取与检测信息的窗口,为物联网提供系统赖以进行决策和处理所必需的原始数据。 传感器分类与代码标准是物联网的基础标准。选取合理的分类依据对物联网中各类传感器进行分类编码,有助于传感器及相关设备的管理与统计等,促进物联网传感器的生产、销售及应用等。 三、工作过程 (一)资料调研 调研相关标准及资料中关于传感器分类的现状: 1) GB/T 7665-2005 传感器通用术语:规定了传感器的产品名称和性能等特性术语,适用于传感器的生产、科学研究、教学以及其他有关领域。术语在标准中的编排基本上是按照被测量进行的。 2) GB/T 7666-2005 传感器命名法及代号:规定了传感器的命名方法、代号标记方法、代号,适用于传感器的生产、科学研究、教学以及其他有关领域。在传感器的命名法中主要反映了被测量、转换原理、特征描述以及量程、精度等主要技术指标。 3) GB/T 20521-2006 半导体器件第14-1部分半导体传感器-总则和分类:描述了有关传感器规范的基本条款,这些条款适用于由半导体材料制造的传感
霍尔电流传感器基于磁平衡式霍尔原理,根据霍尔效应原理,从霍尔元件的控制电流端通人电流Ic,并在霍尔元件平面的法线方向上施加磁场强度为B 的磁场,那么在垂直于电流和磁场方向(即霍尔输出端之间),将产生一个电势VH,称其为霍尔电势,其大小正比于控制电流I。下面就让艾驰商城小编对霍尔电流传感器提高精度的方法来一一为大家做介绍吧。 霍尔电流传感器提高量精度、首先在安装接线、即时标定校准和使用工作环境考虑外,还需要通过以下方法来进行提高: 1、原边导线应放置于传感器内孔中心,尽可能不要放偏; 2、原边导线尽可能完全放满传感器内孔,不要留有空隙; 3、需要测量的电流应接近于传感器的标准额定值ipn,不要相差太大。如条件所限,手头仅有一个额定值很高的传感器,而欲测量的电流值又低于额定值很多,为了提高测量精度,可以把原边导线多绕几圈,使之接近额定值。例如当用额定值100a的传感器去测量10a的电流时,为提高精度可将原边导线在传感器的内孔中心绕十圈(一般情况,np=1;在内孔中绕一圈,np=2;……;绕九圈,np=10,则np×10a=100a与传感器的额定值相等,从而可提高精度); 4、当欲测量的电流值为ipn/10的时,在25℃仍然可以有较高的精度。 艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。 如需进一步了解图尔克、奥托尼克斯、科瑞、山武、倍加福、邦纳、亚德客、施克等各类传感器的选型,报价,采购,参数,图片,批发信息,请关注艾驰商城https://www.doczj.com/doc/9017466694.html,/
一、霍尔电流电压传感器、变送器的基本原理与使用方法 1.霍尔器件 霍尔器件是一种采用半导体材料制成的磁电转换器件。如果在输入端通入控 制电流I C ,当有一磁场B穿过该器件感磁面,则在输出端出现霍尔电势V H 。 如图1-1所示。 霍尔电势V H 的大小与控制电流I C 和磁通密度B的乘积成正比,即:V H =K H I C Bsin Θ 霍尔电流传感器是按照安培定律原理做成,即在载流导体周围产生一正比于该电流的磁场,而霍尔器件则用来测量这一磁场。因此,使电流的非接触测量成为可能。 通过测量霍尔电势的大小间接测量载流导体电流的大小。因此,电流传感器经过了电-磁-电的绝缘隔离转换。 2.霍尔直流检测原理 如图1-2所示。由于磁路与霍尔器件的输出具有良好的线性关系,因此霍尔 器件输出的电压讯号U 0可以间接反映出被测电流I 1 的大小,即:I 1 ∝B 1 ∝U 我们把U 0定标为当被测电流I 1 为额定值时,U 等于50mV或100mV。这就制成 霍尔直接检测(无放大)电流传感器。
3.霍尔磁补偿原理 原边主回路有一被测电流I1,将产生磁通Φ1,被副边补偿线圈通过的电流I2所产生的磁通Φ2进行补偿后保持磁平衡状态,霍尔器件则始终处于检测零磁通的作用。所以称为霍尔磁补偿电流传感器。这种先进的原理模式优于直检原理模式,突出的优点是响应时间快和测量精度高,特别适用于弱小电流的检测。霍尔磁补偿原理如图1-3所示。 从图1-3知道:Φ 1=Φ 2 I 1N 1 =I 2 N 2 I 2=N I /N 2 ·I 1 当补偿电流I 2流过测量电阻R M 时,在R M 两端转换成电压。做为传感器测量电 压U 0即:U =I 2 R M 按照霍尔磁补偿原理制成了额定输入从0.01A~500A系列规格的电流传感器。 由于磁补偿式电流传感器必须在磁环上绕成千上万匝的补偿线圈,因而成本增加;其次,工作电流消耗也相应增加;但它却具有直检式不可比拟的较高精度和快速响应等优点。 4.磁补偿式电压传感器 为了测量mA级的小电流,根据Φ 1=I 1 N 1 ,增加N 1 的匝数,同样可以获得高磁 通Φ 1 。采用这种方法制成的小电流传感器不但可以测mA级电流,而且可以测电压。 与电流传感器所不同的是在测量电压时,电压传感器的原边多匝绕组通过串 联一个限流电阻R 1,然后并联连接在被测电压U 1 上,得到与被测电压U 1 成比 例的电流I 1 ,如图1-4所示。
所建立Android项目包的名称可自定义修改 //=============syx==============// package com.example.yidong; //==============================// import android.hardware.Sensor; import android.hardware.SensorEvent; import android.hardware.SensorEventListener; import android.hardware.SensorManager; import android.os.Bundle; import android.app.Activity; import android.view.Menu; import android.view.Window; import android.view.WindowManager; import android.widget.EditText; import android.content.Context; import android.graphics.Bitmap; import android.graphics.BitmapFactory; import android.graphics.Canvas; import android.graphics.Paint; public class MainActivity extends Activity implements SensorEventListener { SensorManager sensorManager; EditText editText; EditText editText1; EditText editText2; @Override protected void onCreate(Bundle savedInstanceState) { super.onCreate(savedInstanceState); setContentView(https://www.doczj.com/doc/9017466694.html,yout.activity_main); editText=(EditText)findViewById(R.id.editText1); editText1=(EditText)findViewById(R.id.editText2); editText2=(EditText)findViewById(R.id.editText3); //获取重力传感器服务 sensorManager=(SensorManager)getSystemService(MainActivity.this.SENSOR_SERVICE); } @Override protected void onResume() { // TODO Auto-generated method stub super.onResume();