
满,铲斗斗刃做直线型型(带齿),侧刃做成折线;
j.为了提高铲斗强度和刚度,对斗容3-5m3的中型装载机来说,斗体材料选用20㎜厚的低碳高强度合金钢,斗刃选用厚为38-40㎜的特殊耐磨钢。在一些重要的部位都用加强板和加强筋进行加强。4.1.3铲斗基本参数的确定
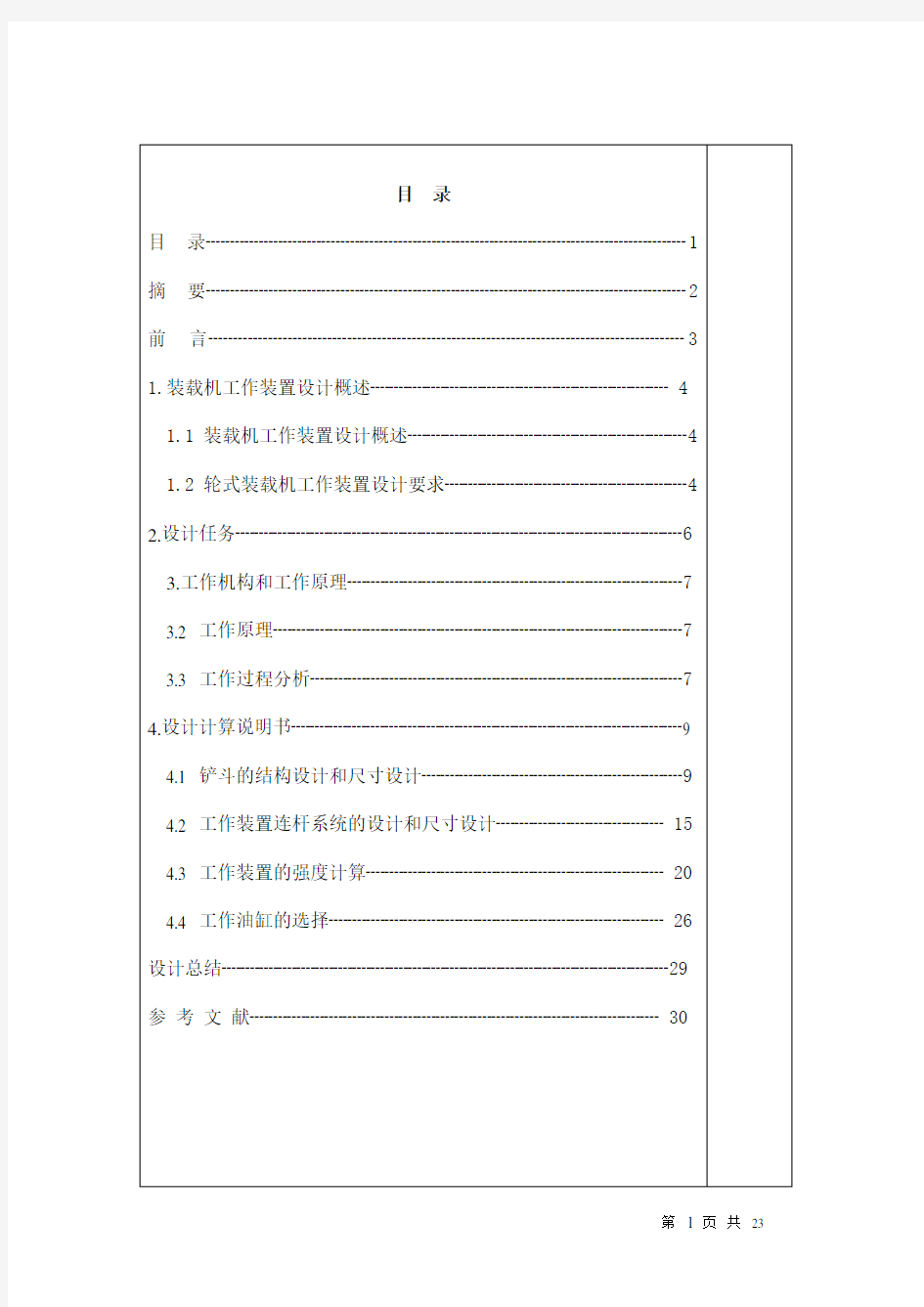
把铲斗的回转半径R(即铲斗与动臂铰接点至切削刃之间的距离)作为基本参数,铲斗的其他参数则作为R的函数。R(见下图)的大小不仅直接影响铲斗底壁的长度,而且还直接影响转斗时掘起力及斗容的大小,所以它是一个与整机总体有关的参数。
铲斗参考尺寸
铲斗的回转半径尺寸可按下式计算:
式中 V r—铲斗的额定容量(m3),设计任务书给出V r=5m3
B —铲斗的内侧宽度(m);
λg—铲斗的斗底长度系数,
通常λg =1.4~1.5;
L z =λz R=1.7401m
挡板高度Lk:
L k =λk R=0.1885m
铲斗圆弧半径r :
r=λr R=0.5801m
4.1.4铲斗容量计算与误差判断
a .铲斗容量计算
设计铲斗的额定容量:
V r =SBo-2a 2b/3+ Bo/8- b 2(a+c)/6
式中 S ——铲斗平装容量横截面,单位 ㎡
a ——挡板高度,单位 m ;
b ——铲斗开口长,单位 m ;
c ——堆积高度,单位 m 。
如图所示,铲斗平装容量横截面积 S 由 5 块基本几何图形组成。
计算式为 S=S1+S2+S3+S4+S5
式中 S1—扇形AGF 的面积,单位㎡;
S2—直角三角形△GFN ,单位㎡;
S3—直角三角形△GAC ,单位㎡;
S4—三角形△CGN ,单位㎡;
S5—直角三角形△CND ,单位㎡。
由图可得S1=(GF)2 (180-γ)360
=0.4115㎡
S2=GF ×FN/2=0.2175㎡
S3=GA ×AC=0.2204㎡
由上得,CN=1.5367m ,CG=0.9912m ,NG=0.6897m ,令
L=(CN+CG+NG)/2,则
S4=))()((NG L CG L CN L L ---=0.2570㎡
S5= CN ×ND/2=0.1309㎡
则综上可得S=1.2373㎡
由b 2=CN 2+ND 2得,铲斗开口长b=1.5463m
如下图,IH 是斗尖至铲斗侧壁的高度c ,根据美国汽车工程师手册规定IH 垂直于CD ,且IK=CK/2=b/4.按照通常的设计要求,挡板DN 应垂直于斗侧壁CN ,所以△CKH ∽△CND 。则
c=IK+KH=0.4722m
则额定容量V r =5.0265 m 3
b .铲斗的容量误差判断
若满足 V r -V h <ε
式中 V h ——计算斗容量
ε——设计中给定的允许斗容量误差,根据设计要求ε
=0.1m 3
则V r - V h =5.0265-5=0.0265 m 3<ε=0.1m 3
所以所设计的铲斗容量符合设计要求。
c .铲斗上下铰接点位置的确定
铲斗的下铰接点即与动臂的连接铰接点。当铲斗在铲掘位置时,应尽量使该点靠近切削刃与地面。下铰接点靠近铲斗切削刃,则转斗时力臂小,有利于增加作用在斗刃上的掘起力。下铰接点靠近地面,可减少在作业时的铲入阻力。下铰接点距斗底高度:
h w=(0.06~0.12)R=0..0786~0.1572m,取为0.12 m
4.2 工作装置连杆系统的设计和尺寸设计
4.2.1 拟定设计任务书的要求
额定斗容: 5 m3
额定载重量:10000kg
整机质量:30486kg
最大掘起力:185.5kN
最大卸载高度:3450mm
轮距:2500mm
最小卸载距离:1250mm
4.2.2图解法设计尺寸参数
a.动臂与铲斗、摇臂、机架的三个铰接点 G、B、A 的确定如图所示,选取直角坐标系 xoy,并选定长度比例尺为μ
,把已设计好
的铲斗横截面图画在坐标系里,斗尖对准坐标原点 O,斗前壁与 x 轴呈 5°前倾角。此为铲斗插入料堆时的位置。
综合考虑各种因素的影响,设计时,一般根据坐标图上工况Ⅰ时的铲斗实际情况,在保证 G 点 y 轴的坐标值 yG=240~350mm 和 x 轴坐标值尽可能小的而且不与斗底干涉的前提下,在坐标图上人为地把 G 点初步确定下来。我取G 点的坐标为(1400,150)。以 G 点为圆心,
K =
d b +d c -d
a <1 其中 d 值由 BG 确定,即 d=2482mm
初步设计时,式中各值选取为:
K=0.950~0.995,a=(0.3~0.5)d ,c=(0.4~0.8)d
所以得 K=0.970,a=993mm ,c=1489mm,b=1986mm 。 如图,铲斗取工况Ⅰ。分别以B 和G 点为圆心,以c 和22b a 分
别为半径画弧,其交点为 E ;再分别以 G 点和 E 点为圆心,a 和 b 半径画弧,则其交点必为 F 。
作图所得,在铲装工况下,即工况Ⅰ下,E 点坐标为(3500,1038),F 点坐标为(1514,1038)。
为了防治机构出现“死点”,“自锁”或“撕裂”现象,设计时应满足下列不等式。
工况Ⅱ时: GF+FE>GE
工况Ⅳ时: FE+BE>FB
工况Ⅱ时,GF=993mm ,FE=1986mm ,GE=2220mm ,因此满足
GF+FE>GE
工况Ⅳ时,FE=1986mm ,BE=1489mm ,FB=1500mm ,因此满足
FE+BE>FB
c. 转斗油缸与摇臂和机架的铰接点C 和D 的确定
初步设计时,一般取BC ≈(0.7~1.0)BE,因此,取BC=0.85BE=1042mm 。C 点一般取在B 点左上方,BC 与BE 夹角(即摇杆折角),可取∠CBE=165°,C 点运动不与铲斗干扰,其高度不影响司机视野。转斗油缸与机架的铰接点 D ,是根据铲斗由工况Ⅱ举升到工况Ⅳ过程为平动和由工况Ⅲ下降到工况Ⅰ能自动放平这两大要求来确定的。当铰接点G 、F 、E 、B 、C 、被确定后,则铲斗分别在工况Ⅰ、Ⅱ、Ⅲ、Ⅳ时的C 点的位置C 1、C 2、C 3、C 4也就唯一的被确定下来。因为铲斗由工况Ⅱ举升到工况Ⅳ或由工况Ⅲ下放到工况Ⅰ的运动过程中,转斗油缸的长度分别保持不变,所以D 点必为C 2点和C 3点连
S σ——材料的屈服极限,国内装载机工作装置的动臂以及摇臂多采用16Mn 钢,其S σ=360MPa ;
n ——安全系数,设计手册中规定 n ≈1.1~1.5,考虑工程机械工作繁重,作业条件恶劣及计算上的失误,一般取n ﹥1.5,此处取 n=2。 m ax τ=6max 10
?b J QS z z ≤[τ] 式中 Q ——计算断面的剪力(N);
S m ax z ——计算断面中性轴B 处的静矩(m 3);
J z ——计算断面时对中性轴B 惯性矩(m 2);
b ——计算断面的宽度(m )。
因为动臂计算断面多为矩形,则m ax τ=
61023?A Q 2431l Z l X l Z l X M E E B B --+==210934 N ·m
F=()E B X X -cos 1β+()B E Z Z - cos 2β=135222 N
)(sin )(sin )(21N Z Z X X Q B E E B ββ-+-==125231N
W =6
2
bh =0.001225m 3 A=bh=0.06×0.35=0.021m 2
则 σ=1225210934+21000
135222=178.63MPa ≤2S σ=180Mpa
4.4 工作油缸的选择
目前大多数装载机的工作装置只有两种油缸:动臂油缸和转斗油缸。推压(变幅)油缸则采用较少。装载机工作装置的动作是靠动臂和转斗油缸的伸缩实现的。油缸应保证产生足够的作用力以克服作业时的各种工作阻力。动臂油缸与转斗油缸的作用力有两种情况:油缸推动机构运动时的作用力为主动作用力(简称工作力或作用力),其最大值取决于液压系统的工作压力和油缸直径(活塞作用面积);工作装置工作时作用于闭锁状态的油缸上的作用力为被动作用力,其最大值取决于液压系统的过载阀压力值和承载活塞面积。如工作装置的动臂油缸不动,靠转斗油缸转动铲斗而进行铲掘作业时,则转斗油缸产生的作用力为主动作用力,动臂油缸所承受的作用力为被动作用力。当油缸最大被动作用力大于外载荷的作用力时,油缸无回缩现象,否则因过载阀打开而溢流,使油缸发生回缩。
4.4.1转斗油缸的选择
a.转斗油缸作用力的确定
由图所示,装载机在铲掘工况,动臂油缸闭锁,转斗油缸发出最大崛起力时,其主动力按下式计算:
P
F = K
n
H
H
H
l
G
H
H
H
l
P
D
Z
4
1
3
8
4
1
3
1
式中:K——考虑连杆机构摩擦损失的系数,取 K=1.25; P
Z
——最大掘起力,P Z=185.5KN;
G
D ——铲斗自重, G
D
=18.35KN;
n——转斗油缸数,n=2。