11.1杠杆
一、知识梳理 (一)杠杆
1.定义:只要在______下能够绕______转动的坚实物体都可以看做杠杆.生活中的杠杆多种多样,如:羊角锤、筷子、摄子、扳手、跷跷板等.
2.杠杆绕着转动的支撑点叫做______,使杠杆转动的力叫做______,阻碍杠杆转动的力叫做______. (二)杠杆的平衡条件
1.杠杆平衡:当动力和阻力对杠杆的转动效果______时,杠杆将处于______状态,这种状态叫做杠杆平衡.
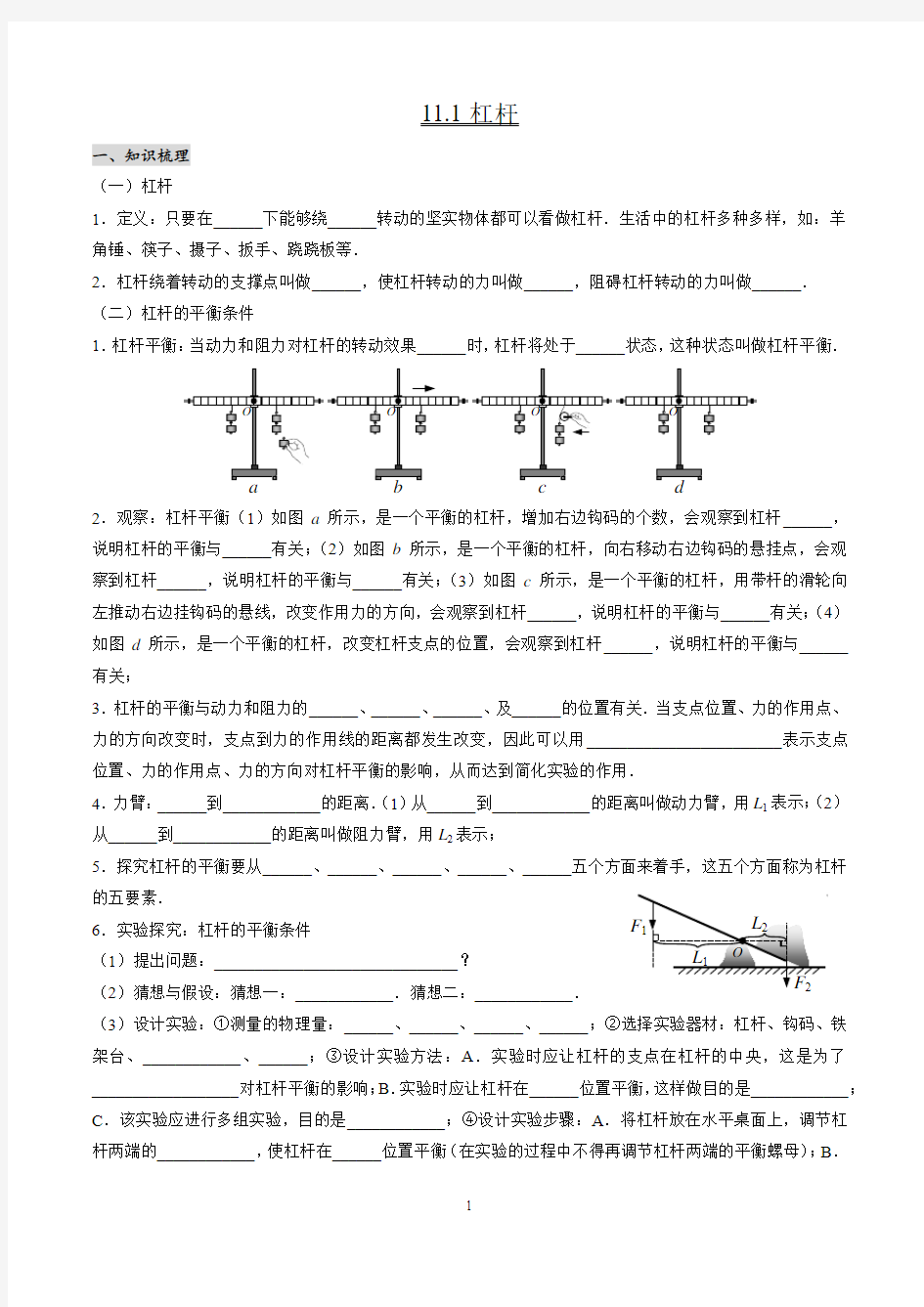
2.观察:杠杆平衡(1)如图a 所示,是一个平衡的杠杆,增加右边钩码的个数,会观察到杠杆______,说明杠杆的平衡与______有关;(2)如图b 所示,是一个平衡的杠杆,向右移动右边钩码的悬挂点,会观察到杠杆______,说明杠杆的平衡与______有关;(3)如图c 所示,是一个平衡的杠杆,用带杆的滑轮向左推动右边挂钩码的悬线,改变作用力的方向,会观察到杠杆______,说明杠杆的平衡与______有关;(4)如图d 所示,是一个平衡的杠杆,改变杠杆支点的位置,会观察到杠杆______,说明杠杆的平衡与______有关;
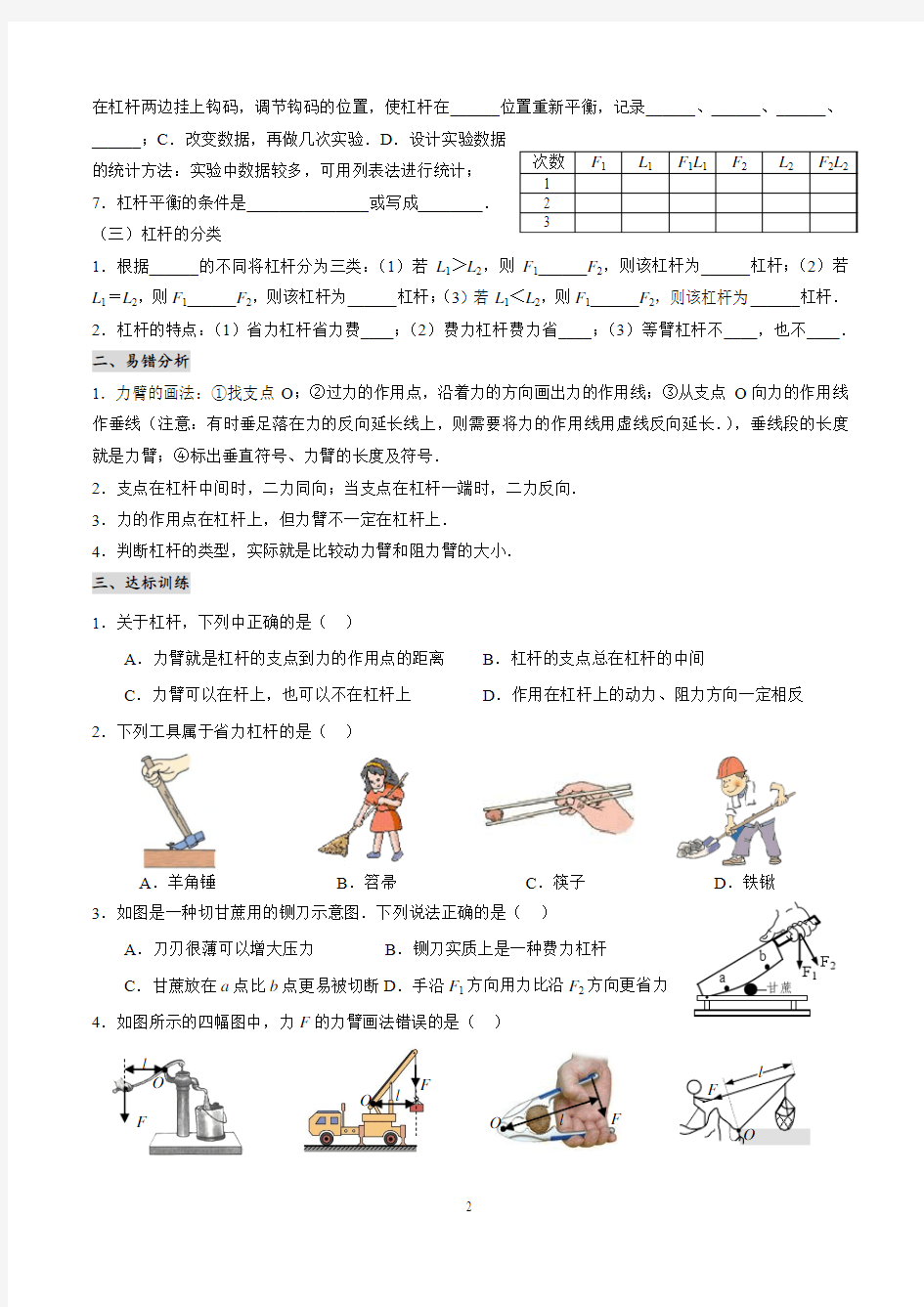
3.杠杆的平衡与动力和阻力的______、______、______、及______的位置有关.当支点位置、力的作用点、力的方向改变时,支点到力的作用线的距离都发生改变,因此可以用________________________表示支点位置、力的作用点、力的方向对杠杆平衡的影响,从而达到简化实验的作用.
4.力臂:______到____________的距离.(1)从______到____________的距离叫做动力臂,用L 1表示;(2)从______到____________的距离叫做阻力臂,用L 2表示;
5.探究杠杆的平衡要从______、______、______、______、______五个方面来着手,这五个方面称为杠杆的五要素.
6.实验探究:杠杆的平衡条件
(1)提出问题:______________________________?
(2)猜想与假设:猜想一:____________.猜想二:____________.
(3)设计实验:①测量的物理量:______、______、______、______;②选择实验器材:杠杆、钩码、铁架台、____________、______;③设计实验方法:A .实验时应让杠杆的支点在杠杆的中央,这是为了__________________对杠杆平衡的影响;B .实验时应让杠杆在______位置平衡,这样做目的是____________;C .该实验应进行多组实验,目的是____________;④设计实验步骤:A .将杠杆放在水平桌面上,调节杠杆两端的____________,使杠杆在______位置平衡(在实验的过程中不得再调节杠杆两端的平衡螺母);B .
在杠杆两边挂上钩码,调节钩码的位置,使杠杆在______位置重新平衡,记录______、______、______、 ______;C .改变数据,再做几次实验.D .设计实验数据的统计方法:实验中数据较多,可用列表法进行统计; 7.杠杆平衡的条件是_______________或写成________. (三)杠杆的分类
1.根据______的不同将杠杆分为三类:(1)若L 1>L 2,则F 1______F 2,则该杠杆为______杠杆;(2)若L 1=L 2,则F 1______F 2,则该杠杆为______杠杆;(3)若L 1<L 2,则F 1______F 2,则该杠杆为______杠杆. 2.杠杆的特点:(1)省力杠杆省力费____;(2)费力杠杆费力省____;(3)等臂杠杆不____,也不____. 二、易错分析
1.力臂的画法:①找支点O ;②过力的作用点,沿着力的方向画出力的作用线;③从支点O 向力的作用线作垂线(注意:有时垂足落在力的反向延长线上,则需要将力的作用线用虚线反向延长.),垂线段的长度就是力臂;④标出垂直符号、力臂的长度及符号.
2.支点在杠杆中间时,二力同向;当支点在杠杆一端时,二力反向. 3.力的作用点在杠杆上,但力臂不一定在杠杆上. 4.判断杠杆的类型,实际就是比较动力臂和阻力臂的大小. 三、达标训练
1.关于杠杆,下列中正确的是( )
A .力臂就是杠杆的支点到力的作用点的距离
B .杠杆的支点总在杠杆的中间
C .力臂可以在杆上,也可以不在杠杆上
D .作用在杠杆上的动力、阻力方向一定相反
2.下列工具属于省力杠杆的是( )
A .羊角锤
B .笤帚
C .筷子
D .铁锹
3.如图是一种切甘蔗用的铡刀示意图.下列说法正确的是( )
A .刀刃很薄可以增大压力
B .铡刀实质上是一种费力杠杆
C .甘蔗放在a 点比b 点更易被切断
D .手沿F 1方向用力比沿F 2方向更省力 4.如图所示的四幅图中,力F 的力臂画法错误的是( )
O
l
F O l
F
l
O F
A B C D
5.小明在按压式订书机的N 点施加压力,将订书针钉入M 点下方的纸张中,能正确表示他使用该订书机时的杠杆示意图是( )
A .
B .
C .
D .
6.如图中的皮划艇运动员一手支撑住浆柄的末端,另一手用力划桨,此时的船桨可看作是一个杠杆.下图中的船桨模型中最合理的是( )
A .
B .
C .
D .
7.渔民大明借助湖中礁石,要把竹竿尽可能深地插入湖底淤泥,如图所示,效果最好的是( )
A
B
C
D
8.如图所示,在轻质杠杆上吊一重物G ,在一端施加一个始终与杠杆垂直的动力F ,使杠杆缓慢地从OA 转至OB ,则在转动过程中( )
A .F 不变,杠杆是省力杠杆
B .F 变大,杠杆是省力杠杆
C .F 不变,杠杆是费力杠杆
D .F 变大,杠杆是费力杠杆
9.如图,O 为拉杆式旅行箱的轮轴,OA 为拉杆.现在拉杆端点A 处施加力F ,使箱体从图示位置绕O 点缓慢逆时针转至竖直位置.若力F 的大小保持不变,则力F 的方向应( )
A .垂直于OA
B .竖直向上
C .沿OA 向上
D .水平向左 10.如图所示.杠杆上分别站着大人和小孩(G 大人
>G
小孩
).且在水平位置平衡,杠杆自重不计.如果两人
同时以大小相等的速度向支点移动.则杠杆将( )
A .仍能平衡
B .不能平衡,大人那端下沉
C .不能平衡,小孩那端下沉
D .条件不够,无法判断
11.如图所示,在均匀杠杆的A 处挂3个钩码,B 处挂2个钩码,杠杆恰好在水平位置平衡.已知每个钩码的质量均为50g ,若在A ,B 两处各加1个钩码,那么杠杆( )
A .右边向下倾斜
B .左边向下倾斜
C .仍保持水平位置平衡
D .无法确定杠杆是否平衡
12.工人师傅用独轮车搬运砖块,车和砖块所受的重力G =1200N ,有关尺寸如图所示,工人师傅推车时,人手向上的力F 的大小是( )
A .300N
B .400N
C .600N
D .1200N
13.如图所示,杠杆AOB 用细线悬挂起来,分别在A 、B 两端分别挂上质量为m 1、m 2的重物时,杠杆平衡,此时AO 恰好处于水平位置,AO =BO ,不计杠杆重力,则m 1、m 2的关系为( )
A .m 1>m 2
B .m 1<m 2
C .m 1=m 2
D .无法判断
14.如图所示,一根一端粗一端细的木棒,用细线悬起来,刚好在水平处平衡,如果沿悬挂线锯成两段,则( )
A .粗端较重
B .细端较重
C .两端一样重
D .无法比较
15.如图所示,体积之比为1:2的甲、乙两个实心物块,分别挂在杠杆两端,此时杠杆恰好水平平衡.则甲、乙两个物块的密度之比为( )
A .1:1
B .1:2
C .2:1
D .4:1
16.如图是同学们常用的燕尾夹,AB =BC ,当用力摁住C 点打开该夹子时,可把______点看作支点,此时夹子可近似看作______杠杆(选填“省力”、“费力”或“等臂”).
17.如图所示,用固定在墙上的三角支架ABC 放置空调室外机.如果A 处螺钉松脱,则支架会绕______点倾翻.已知AB 长40cm ,AC 长30cm .室外机的重力为300N ,正好处在AB 中点处,则A 处螺钉的水平拉力为______N (支架重力不计).
0.6m
G
1、在PLC硬件组态里先配置好CU320: 在Survey栏目配置好ControlUnit控制器、INFEEDS电源和DRIVES驱动器的TELEGRAM报文。在Detail栏目配置报文长度和地址。 2、配置完成后编译并保存,在Step7中会自动生成一个伺服配置: 3、双击在STARTER中打开所配置的伺服,选择ONLINE,在线前需要将CU320的DP拨码设置成和硬件组态中定义 的一致。 4、在线后左边栏目中会出现AutoConfiguration选项,点击后选择Servo后会自动生成一个基本配置(包括 ControlUnit控制器、INFEEDS电源和DRIVES驱动器,参数是自动读取上来的),首先需要对INFEEDS和DRIVES 配置CONFIGURATION(默认既可): 5、 6和DRIVES中的一些参数EXPERT—-EXPERTLIST: 7、INFEEDS:P10–0READY;1—QUICKCOMMISSIONING(修改某些参数时需要在1状态,修改完成后需要改为 0),P210Driveunitlinesupplyvoltage驱动器实际供电电压可能和选型不一致。 8、DRIVES:Changeparameterp1821ifneedtochangedirection, p2571formaxspeed,p2572foraccelerationadjust,p2573fordecelerationadjust,p2585jogspeed 如果采用手动方式,需要在Configuredriveunit窗口中逐步配置,并修改以上的参数。 9、报文配置(包括控制器、电源和驱动器):COMMUNICATION--PROFIBUS
2019-2020年九年级物理《111杠杆2》学案 苏科版 课题:§11.1杠杆 2011年【蠡】物九上002 一、学习目标 1、理解杠杆平衡的条件,并能用它分析解决有关杠杆平衡的问题。 2、知道杠杆的种类以及各种杠杆的特点。 二、知识回顾 1、当杠杆保持静止或匀速转动时,我们就说杠杆处于__________________状态。. 注意:杠杆处于平衡状态不一定是水平位置。例如下面图甲、乙当杠杆静止时我们说处于平衡状态的是_____________(选填“甲”或“乙”或“甲和乙”) 2、在上图中分别画出甲、乙两图动力和阻力对支点的力臂L1和L2:在甲、乙两图中,力F 的力臂都是OA 吗?________。图________更便于测量力臂,因为杠杆在________位置平衡。 所以我们在做杠杆平衡实验时应该让杠杆在________位置平衡,这样的目的是________ 三、学习过程: 1、探究杠杆平衡条件 观察老师的演示实验,并把实验数据结果记入课本P4的表格中。 分析、比较表中的数据,你能得到的结论是: 。 思考:(1)此实验如此多次测量,得到多组数据的目的是 。 (2)若在实验中,不沿竖直方向用力,所测得的拉力值将会变 ,原因是: 。 (3)若实验中,悬挂钩码和拉力在支点的同一侧(如图丙,测力计在C 点处),若使杠杆平衡则拉力方向是 。 (4)在杠杆平衡条件的实验中,如果测力计改用钩码:如图丁 所示,在杠杆左边A 处挂四个相同钩码,要使杠杆在水平位置平衡,应在杠杆右边B 处挂同样钩码 个或C 处挂同样钩码 个。 2、利用杠杆平衡条件解决问题 (1)、某同学在做“探究杠杆平衡条件”的实验时,所测量的结果如下表, (1 B A 乙 甲 A A O O B A F A F A C 丁
杠杆综合测试 1.如图1所示的工具中,属于费力杠杆的是() 2.下列说法正确的是() A.杠杆的力臂一定与杠杆重合 B. 力的作用线过支点,它的力臂为0 C.动力臂加阻力臂等于杠杆的长度 D.杠杆的支点在杠杆的中间 3.如图2,杠杆分别在F1、F2、F3作用下保持静止,O为支点,则:( ) A.F l最小B.F2最小C.F3最小D.三个力一样大 4.如图,一个直杠杆可绕轴O转动,在直杆的中点挂一重物,在杆的另一端施加一个方向始终保 持水平的力F,将直杆从竖直位置慢慢抬起到水平位置过程中,力F大小的变化情况是( ) A.一直增大 B.一直减小 C.先增大后减小 D.先减小后增大 5.在棉花产区,拔棉杆是农民的一项繁重的体力劳动。王刚同学仿照钳子的结构制成一种工具。 如图4所示,使用时,将小铲着地,用虎口夹住棉杆的下部,然后在套管上用力,棉杆就拔出来了。该农具可视为杠杆,则支点、动力作用点、阻力作用点对应下列位置正确的是() A. 转轴—虎口—套管 B. 小铲—套管—虎口 C. 小铲—虎口—套管 D. 虎口—转轴—套管 6.清洁卫生,预防疾病,人人有责!为了搞好卫生,目前很多家庭都备有垃圾 桶,如图是家用脚踏式垃圾桶的结构图,F为装垃圾时开盖用的脚踏板。下 列说法中正确的是() A.两杠杆均为省力杠杆B.两杠杆均为费力杠杆 C.FED为省力杠杆D.ABC为省力杠杆 7.如图所示轻质杠杆OA上悬挂着一重物G,O为支点.在A端用力使 杠杆平衡.下列叙述正确的是() A.此杠杆一定是省力杠杆 B.沿竖直向上用力最小 C.此杠杆可能是省力杠杆也可能是费力杠杆 D.沿杠杆OA方向用力也可使杠杆平衡 8.活动课上,小红同学用一杆秤称一实心球的质量,如图所示。当 杆秤在水平位置平衡时,秤砣拉线正好压在4 kg的刻度线上。根 据秤砣拉线、提纽和称钩所在秤杆的位置之间的距离的粗略关系, 可以估测出秤砣的质量大约是() A.10 g B.400 g C.1000 g D.4000 g 9.在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在位置平衡, 这样做是为了。 A. 钢丝钳 B. 起子C羊角锤. D.镊子 转轴 虎口 套管 小铲
这个主要是那个报文的起始地址,起始地址可能有些不同,可以在PLC的硬件组态里可以看到。比如PLC 硬件组态的输出的起始地址是334,到357结束,那么PQW334就是111报文的STW1,PQ334.0-PQ335.7的每一位跟STW1的每一位对应PQW336就是对应POS_STW1,一次往下。一直到PQW356对应最后一个控制字MDI-DEC。输出的也是一次对应状态字,ZSW1,POS_ZSW1.........WARN_CODE 可能出现的问题: 1. S120的基本定位功能必须在项目离线的情况下进行配置,步骤为离线、配置、驱动配置、激活基本定 位、选择111报文、报文结构、传输到硬件组态。配置结束后在线,连接驱动器。读参数r108.3=1,r108.4=1就表示基本定位功能已激活。 2. 硬件限位的设计牵涉到许多方面,有安全回路设计的硬件限位,只能采用强制短路开关暂时短接限位 开关,在此状态下驱动只能通过低速点动退出硬限位 3. 请教个问题,一般是怎么退出硬限位的呀?复位故障后反向转即可. 4. 如果你选择的是s120 的111 报文的话,s120 发给plc 的第6和7个字就是位置实际值,不过它 的单位是LU,负载转一圈的LU值可以在参数p2506 中查到,你要转换成角度值需要自己做一下转换;s120 发给plc 的第8和9个字就是速度实际值。 5. 用111报文使用MDI定位方式作绝对位置控制选择连续数据传输方式时,如何确定定位动作已完成? 可以查看状态位r2683.3,到达位置后其值为1,轴在运行时其值为0请教个问题,为提高定位的动态特性,如何做位置环的优化。 6. 跟速度环的优化没有什么区别,调节比例增益和积分时间,使位置实际值尽可能跟随位置给定,且超 调不要太大。
杠杆作图题练习题 杠杆练习题 姓名________________班级________________得分________________ 一、作图题 1、如图8所示,O点为杠杆的支点,画出力F的力臂,并用字母L表示。 2、渔夫用绳子通过竹杠拉起渔网,如图14所示(请在图上画出 (1)绳子AB对杆拉力F的力臂L( 11 (2)渔网对杆的拉力F的示意图及该力的力臂L( 22 3、如图所示,用一根硬棒撬一块石头,棒的上端A是 动力作用点。 (1)在图上标出:当动力方向向上时,杠杆的支点a ; 当动力方向向下时,杠杆的支点b。 (2)在杠杆上画出撬动石头动力F为最小时的方向。
4、为使杠杆ON在图乙位置能保持静止,需在M点施加一个力F(画出物体A 对杆的拉力的力臂和在M点对杆的最小拉力F的示意图; 5、图是吊车吊起重物的情景,点O是起重臂OB的支点。请在图中作出F、F 的力臂L 、121L。 2 6、(10?德州)如图所示,轻质杠杆可绕O转动,杠杆上吊一重物G,在力F作用下杠杆静止在水平位置,l为F的力臂,请在图中作出力F的示意图及重物G所受重力的示意图。 7、如图所示,F是作用在抽水机手柄A点的动力,O为支点,请在图中画出F 的力臂l。 111 8、利用钓鱼竿钓鱼的示意图如图所示,O为支点,F是手对鱼竿的作用力,请画出: 1 (1)鱼线对钓鱼竿拉力F的示意图;(2)F的力臂。 21 9、请在图中画出动力F的力臂L。 11
9题图 8题图 10、如图所示,曲杠杆AOBC自重不计,O为支点,要使杠杆在图示位置平衡,请作出作用在C点最小的力F的示意图及其力臂L( 1 11、如图所示,杠杆OA在力F、F的作用下处于静止状态,L是力F的力臂(在图中画出1222 力F的力臂L和力F( 112 10题图 11题图 12、如图所示,画出使杠杆平衡的最小力的示意图(要求保留作图痕迹) 二、实验,探究题 13、在探究杠杆平衡条件的实验中: (1)小明发现杠杆右端低左端高,要使它在水平位置平衡,应将杠杆右端的平衡螺母向_________调节。小明调节杠杆在水平位置平衡的主要目的
V90基本定位器控制(EPOS)常问问题 目录 1:SINA_POS怎样实现主动回零(带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时),参考挡块回零开关接到哪里,怎样配置? 2:硬件限位开关怎么接,怎样激活硬件限位功能? 3:运行命令给出后轴不运行? 4:如何激活软件限位开关? 5:excute触发定位动作时90 PN无响应? 6:V90 PN 为什么找不到111报文? 7:在博途中组态V90 PN时为什么找不到111报文? 8:使用STEP7软件,如何实现S7-300/400控制V90PN位置控制? 9:怎样设置机械结构、减速比、模态轴,模态范围怎么设置? 10:EPOS 可以实现位置同步控制吗? 11:FB284如何对ConfigEpos管脚进行配置? 12:FB284中HWIDSTW/HWIDZSW怎么填写?
13:绝对值编码器如何回零? 14:SINA_POS 转速设置及实际值显示? 15:绝对值编码器掉电后位置丢失怎么办? 16:FB284怎样实现绝对定位控制? 17:FB284怎样实现相对定位控制? 18:FB284怎样实现连续运行模式控制? 19:FB284怎样实现程序块运行控制? 20:FB284怎样实现点动"Jog"控制? 21:EPOS模式下机械参数如何设置? 带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时,参考挡块回零开关接到哪里,怎样配置? 回零开关连接到一个PLC的数字量输入点,PLC内编程将其状态关联到FB284功能块ConfigEPos输入引脚的bit6。 (1)将V90参数P29240设置为1(选择参考挡块+零脉冲方式回零); (2)将回零开关连接到一个PLC的数字量输入点; (3)在PLC内编程,将回零开关DI点的状态关联到FB284功能ConfigEPos输入
S120 通过 111 报文来实现 Basic Position 功能 S120 Basic Position Function using Standard Telegram 111
摘要 本文介绍了如何通过西门子标准报文 111来实现 SINAMICS S120 的基本定位功能,较为详细地介绍了点动、回零、限位、程序步以及 MDI 功能。 关键词 SINAMICS S120、基本定位、标准报文 111 Key Words SINAMICS S120、Basic Position、standard telegram 111 IA&DT Service & Support Page 2-25
目录 1.概述 (4) 2.激活基本定位功能 (4) 3. 基本定位_点动(JOG) (7) 4. 基本定位_回零(JOG) (8) 4.1 设置参考点 (Set_Reference) (9) 4.2 主动回零 (Active_homing) (10) 5. 基本定位_手动数据输入(MDI) (16) 6. 基本定位_程序步(Traversing Blocks) (17) IA&DT Service & Support Page 3-25
1.概述 S120 有两种形式: 用于多轴系统的 DC/AC 装置 用于单轴系统的 AC/AC 装置 这两种形式的S120,在 Firmware V2.4 及以上版本都已具备基本定位功能。SINAMICS S120 基本定位功能包括如下内容: ? 点动 (Jog): 用于手动方式移动轴,通过按钮使轴运行至目标点 ? 回零 (Homing/Reference):用于定义轴的参考点或运行中回零 ? 限位 (Limits):用于限制轴的速度、位置。包括软限位、硬限位 ? 程序步 (Traversing Blocks): 共64个程序步,可自动连续执行一个完整的程序也可单步 执行 ? 直接设定值输入/手动设定值输入 (Direct Setpoint Input / MDI):目标位置及运行速度 可由上位机实时控制。 通过 111 报文实现基本定位功能的前提条件: Firmware version: V2.6.1 或更高版本 调试软件:Starter V4.1.3 或更高版本 / SCOUT V4.1.2.4 + SSP 或更高版本/STEP 7 V5.4.4 或更高版本 2.激活基本定位功能 S120 的基本定位功能必须在项目离线的情况下进行配置,具体步骤下图所示: IA&DT Service & Support Page 4-25
1500与V90通信控制 位置模式 注意:GSD和库的安装,打开样例程序即可自动安装,若不能正常安装请按以下步骤插入GSD包,在“选项”——选择“管理通用站描述文件” 把控制指令库放到TIA的Lib-Sys里面,然后重启TIA就可以在“全局库”里找到。 1、在TIA组态V90PN硬件
在“网络视图”中,右边的“硬件目录”中选择“其他现场设备-Drives-SIEMENSAG-SINAMIS",下拉找到V90硬件,拖拽到左边。 左键按住绿色网口图标,移动到对应设备进行网络连接 在网络视图中双击V90PN图标,配置V90PN的报文,位置控制选择111报文。
左键选中V90PN设备,在“属性”栏,命名设备的名称,要和V90驱动的名称一致 驱动的控制模式选择“基本定位器控制”
驱动报文选择“111报文” 斜坡函数发生器选择“生效” 调用SINA_POS对轴进行位置控制,在全局库中选择,打开右边“库”,选择“全局库” SINA_POS指令说明,注意该指令必须使用“111报文”
ModePos: 控制模式选择 1、相对定位 2、绝对定位 5、直接设定零点 6、主动回原点 7、点动模式 Off1:轴使能,RejTrvTsk,IntMStop默认,AckFlt故障复位,Execute启动定位(上升沿),Position设置定位距离(LU),Velocity定位时的速度(LU/min),OverV设定速度百分比输出,OverAcc设定加速度百分比输出,OverDec设定减速度百分比输出,LAddrSP和LAddrAV报文地址,VeloAct实际速度,PosAct实际位置(LU)例:实际设定速度=Velocity*OverV% 注意:点动的速度在驱动里面设定,也可以通过调用SINA_PARA_S修改,VeloAct选择Lreal数据类型,防止数据溢出。 Velocity的设定值和驱动的单圈对应长度(LU)有关,默认设定是10000LU。
11.1杠杆(第一课时) 教学目标: 1.知道什么是杠杆,能从常见的工具中辨认出杠杆。 2、理解力臂的概念,会找杠杆的五要素,能画杠杆示意图。 3、通过本节的学习体会物理与生活的联系,激发学习物理的兴趣重点:会作力臂 难点:力臂的概念,会画力臂。 器材准备:羊角锤、老虎钳、镊子、杠杆、铁架台、钩码、弹簧测力计 教学过程: 引入课题:1、同学们利用自带的工具去拔木块上的钉子有哪些方法 2、在我们的生活中我们会应用到各种各样的工具,在这些工具中有许多都属于杠杆,今天我们就来学习有关杠杆的知识。活动一、找杠杆 1.实验:选用课本图11-1中的工具把图钉从木板上拔出来,细心 体会哪种方法更省力。 2.自学并交流:看课本P3-4内容, 哪一种方法更省力?刚才所用工具有哪些共同的地方? 3.小组归纳,结论:叫杠杆。 活动二、认识杠杆的五要素,学画杠杆示意图 1.自学:看书学习杠杆的支点、动力、阻力、动力臂和阻力臂的概念。 支点:______________________________ 动力:______________________________ 阻力:______________________________ 动力臂:______________________________ 阻力臂:______________________________ 2.学画动力臂、阻力臂:全组先选课本图11-2中一个工具,试画
动力、阻力、动力臂及阻力臂。 3.小组讨论并语言展示:(1)如何区分动力和阻力? (2)如何画力臂? 力臂的作法: 用三角板的一条直角边与力的作用线重合,让另外一条边通过支点,从支点向力的作用线(必要时可正向延长或反向延长)画垂线(力的延长线画虚线),作出动力臂和阻力臂,并用大括号括出动力臂和阻力臂,分别用字母l1、l2表示。 注意事项:请大家认真、工整地画出杠杆示意图,除要标明支点,动力和动力臂,阻力和阻力臂外,还要按比例画出力和力臂,点要清、线要明。 4.画课本图11-2中其它工具的力臂,并在小组内交换检查。 【巩固反馈】 1.在______的作用下,能绕一_________转动的________叫做杠杆.杠杆可以是直的,也可以是_______的. 2.下列说法中正确的是() A.杠杆都是直的硬棒B.力臂是力的作用点到支点的距离 C.力臂是支点到力的作用线的距离D.杠杆的动力臂总是大于阻力臂 3.如图下图所示,画出各力对支点O的力臂l1和l2
《11.1杠杆》 一、填空题 1.杠杆在我国古代就有了许多巧妙的应用,护城河上安装的吊桥就是一个杠杆(如 图所示),它的支点在____点,在匀速拉起吊桥时,它属于一个______杠杆。 2.杠杆的平衡条件是______,如果杠杆的动力臂是阻力臂的5倍,当杠杆平衡时, 动力是阻力的____________倍。如果作用在杠杆上的动力是80 N,动力臂是40 cm, 阻力臂是1m,杠杆平衡时,阻力是______ N。 3.如图1所示为使杠杆平衡,F1、F2、F3三次分别作用在A点,其中______最小. 4.在下列日常生活使用的工具中(填序号):①撬棒②天平③筷子④铡刀⑤脚踏⑥镊子⑦起子⑧钓鱼杆⑨刹车 省力的杠杆有_________________它们的动力臂阻力臂; 费力的杠杆有_________________它们的动力臂阻力臂; 既不省力也不费力的杠杆有_________________它们的动力臂阻力臂 5.一条扁担长1.5 m,前端挂200 N重的货物,后端挂300 N重的货物,肩膀应离扁担的前端_____ m才能使其刚好平衡。 6.撬棒在撬道钉时,动力臂是阻力臂的15倍,当撬道钉时用力20N恰能将道钉撬起,则道钉受到的阻力为 N。(不计道钉自身的重力) 7如图2所示,轻质杠杆一端因水平方向力F作用而被逐步抬起,在此过程中F的大小(变大/不变/变小)力臂变化是(变大/不变/变小)。 8. 如图3所示,轻质杠杆OA中点悬挂一个重为60N的物体,在A端施加一坚直向 上的力F,杠杆在水平位置平衡则F=______N。保持F的方向不变,将杠杆从A位置 匀速提到B位置的过程中,力F将_______(变大/变小/不变)
杠杆知识点 1、杠杆定义:在力的作用下绕着固定点转动的硬棒叫杠杆。 说明:①杠杆可直可曲,形状任意。 ②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。 2、杠杆五要素——组成杠杆示意图。 ①支点:杠杆绕着转动的点。用字母O 表示。 ②动力:使杠杆转动的力。用字母 F1表示。 ③阻力:阻碍杠杆转动的力。用字母 F2表示。 说明:动力、阻力都是杠杆的受力,所以作用点在杠杆上。 动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反 ④动力臂:从支点到动力作用线的距离。用字母l1表示。 ⑤阻力臂:从支点到阻力作用线的距离。用字母l2表示。 画力臂方法:一找支点、二画线、三连距离、四标签 ⑴找支点O;⑵画力的作用线(虚线);⑶画力臂(虚线,过支点垂直力的作用线作垂线);⑷标力臂(大 括号)。 3、研究杠杆的平衡条件: 杠杆平衡是指:杠杆静止或匀速转动。 实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。这样做的目的是:可以方便的从杠杆上量出力臂。 ⑴结论:杠杆的平衡条件(或杠杆原理)是: 动力×动力臂=阻力×阻力臂。写成公式F1l1=F2l2也可写成:F1 / F2=l2 / l1 ⑵解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力与方向和力臂大小;然后根据 具体的情况具体分析,确定如何使用平衡条件解决有关问题。(如:杠杆转动时施加的动力如何变化,沿什么方向施力最小等。) ⑶解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值,要使动力最小,必须使动力臂最大,要使 动力臂最大需要做到①在杠杆上找一点,使这点到支点的距离最远;②动力方向应该是过该点且和该连线垂直的方向。 4、应用: 名称 结构 特征 特点应用举例 省力杠杆动力臂 大于 阻力臂 省力、 费距离 撬棒、铡刀、动滑轮、轮轴、羊角锤、钢 丝钳、手推车、花枝剪刀 O F1 l1l 2 F2
初中物理杠杆作图题归类例析 一、杠杆力臂的作法 一找点,二画线(必要时反向延长或正向延长力的作用线),三作垂线段(力臂用虚线 或实线表示),四标符号(标上直角符号和大括号,并标上力臂的字母)。 点拨:杠杆的支点、动力作用点和阻力作用点都必须在杠杆上,力臂和力的作用线必须 垂直 例:如图所示,作出图中各杠杆的动力和阻力的力臂。 二、最大动力臂和最小动力的作法 例1:为使杠杆OA 保持静止,画出在A 点所加最小力F 1的示意图和阻力F 2的力臂l 2. 例2:如图丙所示,用螺丝刀撬起图钉.请在图上画出螺丝刀受到图钉阻力F 2的力臂;并 画出作用在螺丝刀柄上A 点的最小动力F 1的示意图. 例3:如图3所示,一重力可忽略不计的杠杆,支点为O ,A 端挂一重物G ,若要杠杆在图 示位置平衡,要在C 点加最小的力,这个力的方向怎样?
三、根据力臂画力的作法 例1:如图所示,轻质杠杆可绕O转动,杠杆上吊一重物G,在力F作用下杠杆静止在水平位置,l为F的力臂,请在图中作出力F的示意图及重物G所受重力的示意图。 例2:如图6所示,杠杆在力、作用下处于平衡状态,为的力臂。请在图中作出力 。 四、情境设置题作图 例1:画出作用在压水泵摇柄上力的力臂。 例2:杠杆在我国古代就有了许多巧妙的应用,护城河上安装的吊桥(图3)就是一个杠杆,它的支点是C点,画出绳对吊桥的拉力及拉力的力臂。 例3:请你在图3—1中画出使用剪刀时,杠杆AOB所受动力的示意图。 例4:小华在动物园参观时,看到了如上图所示的场景,为使小熊猫不致与石头相撞而
受伤害,请你在杠杆AOB上作出使杠杆AOB在图所示位置静止时的最小力的示意图,图中O为旋转点。 例5:如图所示,使用羊角锤拔钉子,动力作用在锤柄上A点。请作出拔钉子时所用最小动力的示意图。(注意:请在图上保留为确保作图准确所画的辅助线) 杠杆分类 (1)L1>L2时,叫省力杠杆,其特点是省了力但费了距离。如开瓶盖的起子、铡刀、老虎钳、道钉撬等。 (2)L1<L2时,叫费力杠杆,其特点是费了力但省了距离。如钓鱼杆、筷子、镊子、缝纫机脚踏板等。 (3) L1=L2时,叫等臂杠杆,其特点是不省力也不费力,不省距离也不费距离。如天平、定滑轮等。 练习题: 1、下列所示的杠杆中,属于费力杠杆的是() 2、如下图所示的工具,在使用中属于费力杠杆的是()