Location based services using geographical information systems
Balqies Sadoun *,Omar Al-Bayari
Surveying and Geomatics Engineering Department,Al-Balqa’Applied University,Al-Salt,Jordan
Available online 27June 2007
Abstract
One of the most obvious technologies behind Location Based Services (LBS)is positioning,with the most widely recognized system being the Global Positioning System (GPS).There are,however,other means of positioning in addition to GPS.These other technologies are network based positioning and typically rely on various means of triangulation of the signal from cell sites serving a mobile phone.In addition,the serving cell site can be used as a ?x for location of the user.
More and more organizations have started to apply location-based services over Wireless LANs to enable improvements to appli-cations.Generally,a LBS keeps track of the position of users on the network as they roam through the facility.A central system collects and integrates this position information to drive additional functions that identify the position of users in relation to the facility and pertinent areas,such as information on hospitals and medical centers,booths,emergency centers,stores,police stations,gas stations,etc.
LBSs o?er personalized services to the subscribers based on their current position using Global Navigation Satellite System (GNSS),Geographic Information System (GIS)and Wireless Communications and Networking technologies.LBSs o?er modern world the tool for e?cient management and continuous control.More and more people involve LBS in their industry and day-to-day life to better achieve their goals.
In this paper,we present a review of LBS using Geographical Information Systems and two applications that we developed.These are auto-matic vehicle location,which can provide better management and control for a moving ?eet of vehicles and police tra?c information system.ó2007Elsevier B.V.All rights reserved.
Keywords:Location based service (LBS);Geographic information system (GIS);Global navigation satellite system (GNSS);Global positioning system (GPS)and Wireless networks (WNs);Wireless communications (WCs)
1.Introduction
The increasing demand for commercial LBS has driven scientists to focus on more accurate positioning solutions.LBS employs accurate,real-time positioning to connect users to points of interest and advises them of the current conditions,such as tra?c and weather conditions,or pro-vides routing and tracking information using wireless devices.It is important to integrate the mobile computing technology and the GIS technology in order to meet the needs of LBS,which is considered one of the most promis-ing applications of GIS.The location of the caller could be determined by other position determination techniques.
These include Cell-ID,Enhanced Observed Time Di?er-ence (E-OTD),Observed Timed Di?erence of Arrival (OTDOA),Wireless Assisted GNSS (A-GNSS)and hybrid technologies (combining A-GNSS with other standard technologies).Cell-ID is used for positioning purposes,but it is not accurate.In the following,we will present an introduction on the LBS,its combination with GIS and WC,and some of our recent related work [1–4].
LBS systems aim at improving user-friendly info-mobil-ity services for position determination by combining wire-less communications (WCs),GNSS and GIS based on mobile client/server architecture [1].Location determina-tion may be based on GNSS Technologies (mainly location intelligence is stored within terminal GPS),or on Network Technologies that exploit the cellular infrastructure to obtain geo-location information (Wireless Technology).Positioning techniques based on the use of a GNSS/GIS
0140-3664/$-see front matter ó2007Elsevier B.V.All rights reserved.doi:10.1016/https://www.doczj.com/doc/8816208987.html,com.2007.05.059
*
Corresponding author.
E-mail addresses:balqiessadoun@https://www.doczj.com/doc/8816208987.html, (B.Sadoun),obayari@https://www.doczj.com/doc/8816208987.html,.jo (O.Al-Bayari).
https://www.doczj.com/doc/8816208987.html,/locate/comcom
Available online at https://www.doczj.com/doc/8816208987.html,
Computer Communications 30(2007)
3154–3160
and cellular network infrastructure are progressing at an impressive pace.
GNSS receivers determine the position,precise time and velocity in the coordinate reference system.Then saves these data in the National Marine Electronics Association format(NMEA)to be transmitted to the control center via wireless communication means or downloaded directly via serial ports,such as RS-232,USB2.0,etc.
GNSS is the technical interoperability and compatibility between various satellite navigation systems which are the modernized GPS,Galileo and GLONASS to be used glob-ally by the public and the industry with no regard to the nationality of each system in order to promote the safety and convenience of life[2,3].GNSS means the compatibil-ity and interoperability of the three main satellite technol-ogies:GPS,GLONASS and Galileo.At the time of writing this paper,the only complete Global Navigation Satellite System(GNSS)is basically the GPS system and most of the existing worldwide related applications are based on the GPS system/technology.The GNSS technology will become clearer after the operation of European Galileo and the reconstruction of Russian GLONASS by the end of2008.
GNSS applications in all?elds will play a key role,mov-ing its use from the transportation domain to multimodal use,outdoors and indoors.It is expected that GNSS will increase signi?cantly the precision in position domain[4]. The combined and competitive bene?ts of GPS and Galileo will result in major improvements in navigation,timing, accuracy and related applications and services[5].To real-ize these bene?ts,Galileo receivers must be made available to enable the commercial exploitation and market penetra-tion of the Galileo system and services.These should be based on?exible system design principles and equally?ex-ible implementation.
Precise positioning using GNSS technology is limited by the availability of satellite signals in speci?c locations.
With Galileo system,more satellites have been added to the current GPS and GLONASS systems,users will have the possibility to track a large number of the total75avail-able satellites.
2.GNSS positioning technique
The basic concept of point position depends on the trila-teration between the receiver and satellite.Range measure-ments from four satellites are needed to determine the four unknown X,Y,Z and receiver clock o?set(D d).The ana-lytical solution for receiver A and four satellites could be written as[6]:
R1 A etT?
??????????????????????????????????????????????????????????????????????????????????????????
eX1etTàX AT2teY1etTàY AT2teZ1etTàZ AT2
q
tcáD d
R2 A etT?
??????????????????????????????????????????????????????????????????????????????????????????
eX2etTàX AT2teY2etTàY AT2teZ2etTàZ AT2
q
tcáD d
R2 A etT?
??????????????????????????????????????????????????????????????????????????????????????????
eX3etTàX AT2teY3etTàY AT2teZ3etTàZ AT2
q
tcáD d
R4 A etT?
??????????????????????????????????????????????????????????????????????????????????????????
eX4etTàX AT4teY4etTàY AT2teZ4etTàZ AT2
q
tcáD d
The range R is measured by the receiver and the coordi-
nates of satellite are extracted from the navigation message.
The unknowns in the above equation are X,Y,Z and the
clock error D d.In case of observing more than four satel-
lites,the least square adjustment is performed to estimate
the unknowns.
Hence,coordinates of the receiver and time o?set could
be obtained directly in real time with one epoch measure-
ment.Due to un-modeled errors in pseudo range,such as
ionosphere,troposphere and orbital errors,the accuracy
level of absolute positioning is within10m[7].
The basic concept of LBS network-based techniques is
to calculate the time di?erence between the transmitted
and received signal.
Then multiply the calculated time di?erence by the
velocity of light to obtain the distance.
To calculate the caller location(x,y),we need two equa-
tions.If we have more than three Towers(Base Stations),
the position will be more precise and least square computa-
tion is needed[8].
f ieXT?ces iàsTà
????????????????????????????????????????
ex iàxT2tey iàyT2
q
The most common non-GNSS solutions for mobile posi-
tioning are:(i)Cell-ID(taking into consideration cell size
and timing advance),(ii)TOA(Time of Arrival),(iii)Angle
of Arrival(AOA)and(iv)Enhanced Observed Time Di?er-
ence(EOTD);all make use of the wireless telecommunica-
tions system itself[9].
Cell-ID is the most straightforward solution,and uses
the cell identi?cation information within the mobile tele-
phony network to identify the approximate location of
the caller.However,this technique is often not very useful
because of the low positioning accuracy.
GNSS based location technology(currently Assisted-
GPS)can also be combined with ETOA or TDOA.This
approach requires spot deployment of ETOD and TDOA,
allowing A-GPS to be used in the majority of the network
in order to provide basis for most location information
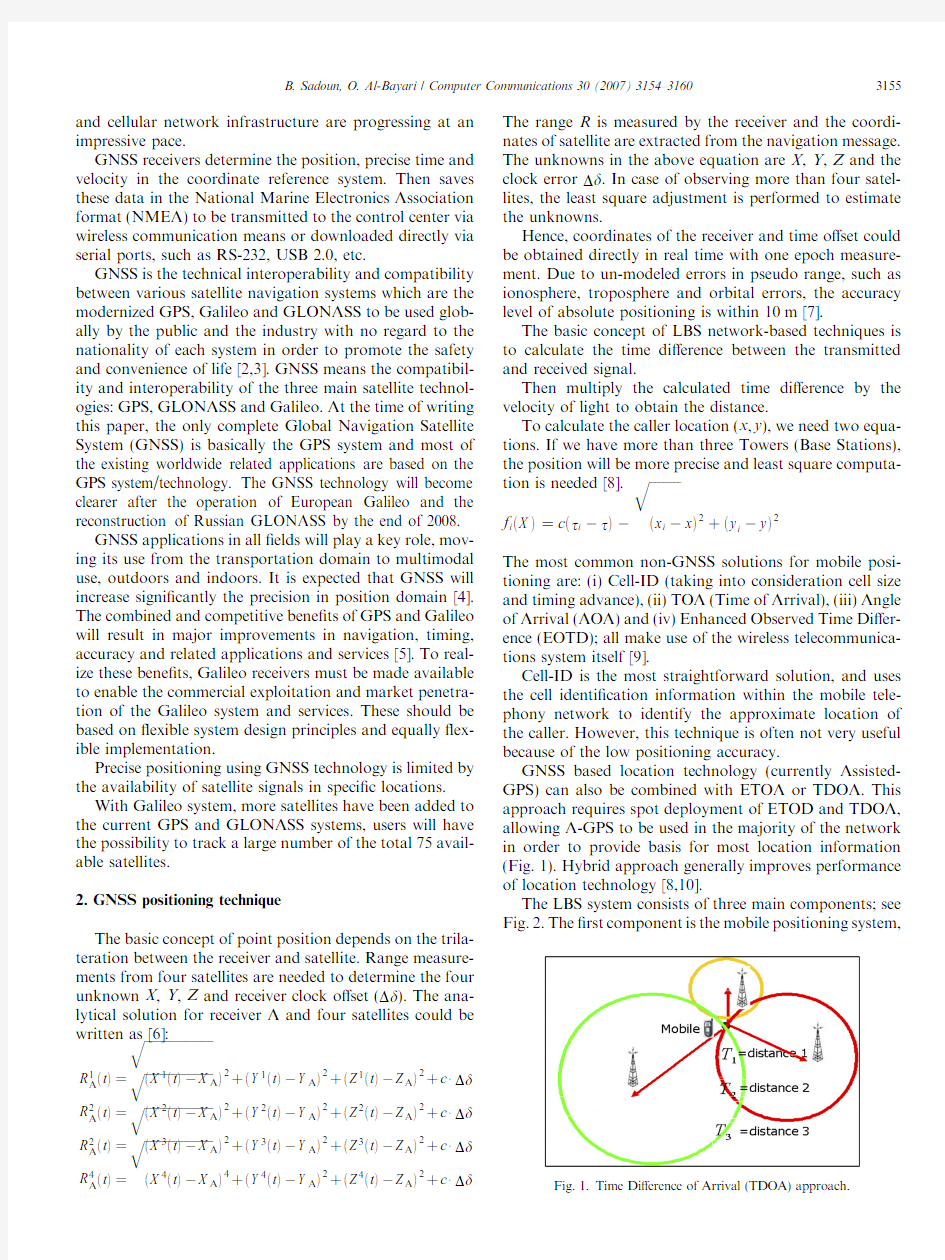
(Fig.1).Hybrid approach generally improves performance
of location technology[8,10].
The LBS system consists of three main components;see
Fig.2.The?rst component is the mobile positioning
system,
Fig.1.Time Di?erence of Arrival(TDOA)approach.
B.Sadoun,O.Al-Bayari/Computer Communications30(2007)3154–31603155
which can be the GNSS,Hybrid GNSS/A-GPS based,or network-based (AOA,TOA,TDOA).The second compo-nent is the mobile telephony network to deliver the service to users.The third is the location-based service application,which consists of a server and a spatial database.
The three components communicate with each other through application programming interfaces (API).The API are designed to help wireless Internet developers to integrate location-based services into mobile telephony net-works and allow the application server to communicate with the spatial database and the billing server.The control center for a LBS platform is the server that handles user interface functions and communicates with the spatial database or data warehouse.3.LBS applications
The LBS applications are divided into four main areas:https://www.doczj.com/doc/8816208987.html,rmation and navigation services:These services pro-vide data directly to end-users,in particular for destina-tion location and criteria for trip optimization.Moving map displays guided by navigation GNSS (currently GPS)receivers are provided by the Automobile manu-facturers as a new option in their modern vehicles.Many rental car companies have GPS-equipped vehicles that give directions to drivers on display screens and through synthesized voice instructions.Moreover,the displays can be removed and taken into a home to plan a trip.A new international industry is born (such as Navtique and Tele Atlas),which is specialized in preparing the maps and voice guidance for navigation system to be used in old and new modern vehicles.
2.Emergency assistance:This type of service provides the location of mobile users in case of distress and need for assistance,such as E-911in US and E-112in Europe.GIS capabilities are essential in such services.
3.Tracking services:In general,an AVL system consists of a GNSS receiver integrated with GSM/GPRS module mounted on the vehicle,communication link between the vehicle and the dispatcher,and PC-based tracking software for dispatching [11].
https://www.doczj.com/doc/8816208987.html,work related services:Location can be achieved by integrating a GNSS receiver in the mobile phone (hand-held solution)or by using the communication network itself,where knowledge of user’s position improves com-munication services.The combination of GNSS receivers and GIS software for data collection and updating is usually sent via wireless communication links to the server and then,posted so as it will be globally accessible and available on the Internet.Most web GIS software packages have the capability to deal with the data via Internet and distribute these data to users in real time.
Developing software under web GIS systems gives a high possibility to integrate the Web GIS Server with wire-less communication to be used for mobile GIS with any application,such as AVL [11].One important factor in integrating of GIS and GNSS application is the working in the same coordinate system or datum.Working in di?er-ent coordinate systems creates data miss-matching in GIS/GNSS applications.
LBS techniques based on GSM,GPRS and WCDMA (Wideband Code Division Multiple Access)networks alone do not o?er high accuracy.Moreover,GNSS alone is insuf-?cient to maintain continuous positioning due to the inev-itable di?culties caused by obstacles.When GNSS signals are blocked or lost,the precision of positioning will be min-imized to unacceptable level.It is expected that the GNSS will increase signi?cantly the precision in the position domain [4,10].
Wide-area augmentation systems should be imple-mented as they allow a signi?cant improvement of accu-racy and integrity performance.WAAS,EGNOS and MSAS provide a useful augmentation to GPS,GLONASS and Galileo services over US,Europe and Japan,respec-tively [11].
The applications of GNSS/GIS/LBS are growing rap-idly,but they have some limitations such as:
?GIS data and maps should be periodically updated.?There should be standards to control the quality of the GIS data.
?Transformation between GNSS reference system such as WGS 84and the local coordinate systems should be well known for those working in the GIS data collection.?Limitation of wireless communication (high cost),limi-tation of GPRS (number of lines for each base station)and rooming problems.
?Customization of GNSS solution (high cost).
?Integration between GNSS technology and other posi-tioning technologies such as odometer,gyros and map matching is still not used.
?Standards for developing GNSS/LBS/GIS solution are not discussed yet.
?Combination between wireless location technology such as Cell-ID,TOA,AOA and ETOA is not implemented in our
country.
Fig.2.The location technology and LBS system.
3156 B.Sadoun,O.Al-Bayari /Computer Communications 30(2007)3154–3160
4.Applications and case studies
GNSS/LBS/GIS applications that we have developed for local use are:(i)AVL system applied to the public transportation company in the capital city,Amman,and (ii)Police tra?c information system to report and update about accidents’locations,the level of danger and the fre-quency of accidents at the location,etc.
4.1.Application 1
4.1.1.AVL system for local public transportation company We have applied AVL system to the public transporta-tion company that operates in Amman city.Vehicle track-ing is one of the fastest-growing GNSS applications today.GPS-equipped ?eet buses (public transportation systems)use GNSS receivers to monitor their locations at all times.The principal bene?t of AVL system in ?eet management is the opportunity for increasing and improving the e?cient use of human and environmental resources in e?ective manners.Transportation infrastructure represents one of the largest and most critical investments by any country.
Movements of people are vital to every aspect of the coun-try’s economy.
GIS and AVL based asset management for road trans-portation system can greatly improve the e?ciency of oper-ations (optimize services,cost and ?eet usage),while at the same time,can make signi?cant contributions to safety,including responses to natural and man-made disasters.A software package has been developed under web GIS soft-ware to integrate the Web GIS Server with wireless com-munication to be used for Mobile GIS with the LBS application as AVL (Fig.3)for the transportation com-pany control and management.The system has operated properly.It will change the local culture of public transpor-tation to be dependable,e?cient and time saving,which was never before.This has helped to give more con?dence to the local transportation company.Local residents start to rely more on the local transportation system as such new mechanism has improved the working schedule and con?dence of people in the accuracy of the entire operation.
Moreover,it will o?er the management a tool for monitoring the ?eet activities and resolving problems before they occur.We hope that better
management
Fig.3.Web Tracking Software applied for ?eet management of the transportation company in Amman city.
B.Sadoun,O.Al-Bayari /Computer Communications 30(2007)3154–31603157
and control on the operating vehicles will provide integ-rity and prosperity to the operating transportation company.
It is expected that such a mechanism will improve the con?dence in the local transportation company in Amman and improve its image among the citizens of the city as in the past the company has an unfavorable reputation.Also this will help to save time,money,pollution and energy for the citizen and the country.The developed Web tracking software provides the control center with all needed infor-mation about the operation process.Continuous contact with drivers and follow up is also provided by the control center to avoid accidents,tra?c and time schedule prob-lems.We had to build a GIS system for the roads and the surrounding environment of Amman.Moreover,we included bu?er zones to keep vehicles on track and to warn the control in case of mishaps.4.2.Application 2
4.2.1.The police tra?c information system
Information system –all accidents’information have to be localized using GNSS technology (mainly GPS)then,the information and location have to be sent to the server via wireless communication means,downloaded directly via serial port or transmitted to the server via Internet.The location Information server will be connected with all police stations in all cities for data updating via web GIS;see Fig.4.The database part is very critical in this application.There are two di?erent types of database,the spatial data-base (street,district,etc.)and the entity database (driver,car,etc.).The arrangement of the data within the database and their interrelation will a?ect the e?ciency of the soft-ware and lead to better management of the generation of reports and consequently the decision-making process;see Fig.5.Interrelation within the database could be designed to allow certain tasks to improve a certain deci-sion-making process,such as the total number of accidents at a certain location within a speci?c period of time.The report warning would require new tra?c planning.
The asset management process in GIS/LBS application is developed on top of GIS software capabilities to facili-tate the analysis,management and decision-making,espe-cially when it is directly related to life saving.
In case of accident,the captured area will be determined as a bu?er circle with a 100-m radius,then the location of the accident will be highlighted on the screen if the number of accidents (at the location)exceeded a speci?c number;without the need to read the report.
Asset management will help the decision makers to localize accident locations and to take the action needed to reduce or eliminate the accident causes automatically.The software classi?es the accident danger level according to certain factors prede?ned by the police committee on road accidents.The success in such projects depends heav-ily on the GIS data quality in the initiation process and on its maintenance
afterward.
Fig.4.GNSS/LBS/GIS combination.
3158 B.Sadoun,O.Al-Bayari /Computer Communications 30(2007)3154–3160
5.Conclusions
To conclude,increasing demand for commercial LBS is pushing at improving user mobility services for position determination by combining WC/GNSS/GIS technologies.Location may be based on GNSS Technologies or on Net-work Technologies (Wireless Technology),but the GNSS technology provides more accurate positions.
GNSS/LBS/GIS applications are at high demand for the time being,but they still have some limitations.LBS industry includes:Information and navigation services,emergency assistance,tracking services and network related services.It is an essential tool for better manage-ment of moving vehicles and is urgent for life saving in emergencies.
In this paper,we introduced two GNSS/LBS/GIS appli-cations that we have developed for local use.These are:AVL system applied to a local public transportation com-pany and police tra?c information system to report and update about accidents’locations,the level of danger and the frequency of accidents at the location.
Automatic vehicle location application can provide bet-ter management and control for a moving ?eet of vehicles,which may keep time schedules,increase operating e?-ciency and avoid/minimize accidents and tra?c problems.
Other LBS application is to create a police tra?c informa-tion system to help in emergency management,better plan-ning and prevention.Applications are increasing at an impressive rate.This area is becoming an attractive industry.
Acknowledgements
The authors gratefully acknowledge the support of GCE Company and Mr.S.Aqel.References
[1]E.Lohnert,E.Wittmann,J.Pielmeier,F.Sayda,Pramount Public Safety &Commercial Info-mobility Applications and Services in the Mountains,ION GPS 2001,Salt Lake City,UT,2001,pp.319–325.
[2]GALILEO,Mission Requirement Document (MRD),European Commission,Issue 5–Rev.1.1,27.March 2003.Available from:https://www.doczj.com/doc/8816208987.html, .
[3]Y.Feng,Combined galileo and GPS:a technical perspective,Journal of Global Positioning Systems (1)(2003)67–72.
[4]https://www.doczj.com/doc/8816208987.html,chapelle,M.E.Cannon,K.O’Keefe,P.Alves,How will galileo improve positioning performance,GPS World 13(9)(2002)38–48.
[5]P.Mulassano,F.Dovis,F.Cllomb,European projects for innovative GNSS-related applications,GPS Solutions 7(2004)
268–270.
Fig.5.The police tra?c information system ?owchart.
B.Sadoun,O.Al-Bayari /Computer Communications 30(2007)3154–31603159
[6]B.Hofmann-Wellenhof,H.Lichtenegger,J.Collins,Global Posi-
tioning System:Theory and Practice,?fth ed.,Springer Verlag,New York,2001.
[7]A.Leick,GPS Satellite Surveying,third ed.,John Wiley and Sons,
New York,2003.
[8]J.J.Ca?ery,G.L.Stu¨ber,Overview of radiolocation in CDMA,IEEE
Communications Magazine(1998)38–45.
[9]R.Jain,A.Puri,R.Sengupta,Geographical routing using partial
information for wireless ad hoc networks,IEEE Journal of Personal Communications8(1)(2001)48–57.
[10]G.Heinrichs,G.Germany,J.Winkel,C.Drewes,L.Maurer,A.
Springer,R.Stuhlberger, C.Wicpalek,A Hybrid Galileo/UMTS Receiver Architecture for Mass-Market Applications,GNSS2005, Available from:https://www.doczj.com/doc/8816208987.html,/publications/ IfEN_Paper_GAWAIN_GNSS2005.pdf.
[11]O.Al-Bayari,B.Sadoun,New centralized automatic vehicle location
communications software system under GIS environment,Interna-
tional Journal of Communication System18(9)(2005)
833–846.
Dr.Balqies Sadoun received her M.S.in Civil
Engineering from the Ecole Nationale Des
Travaux Publique de L’Etat,Lyon,France.She
received another M.S.and Ph.D.degrees in City
and Regional Planning Engineering,College of
Engineering of The Ohio State University,
Columbus,Ohio,USA.Currently,she is the
Chairperson and an Associate Professor in the
Department of Surveying Engineering and Geo-
matics,Faculty of Engineering,at the Al-Balqa’
Applied University,Jordan.Previous positions include Chair of the Department of Architectural Engineering at Applied Science University,Amman,Jordan.Other previous academic experiences include working as a faculty member at the Faculty of Engineering of Yarmouk University and Jordan University of Science and Technology. Dr.Sadoun has worked also as a faculty member at the City University of New York,USA.Dr.Sadoun has authored or co-authored about sixty (60)refereed journals,and conference articles and book chapters.She served on the program and organization committees of several interna-tional conferences.In1999,she served as the Program Co-chair of the 1999Summer Computer Simulation Conference,SCSC’99,and co-edited the Proceedings of the1999Summer Computer Simulation Conference. Her article‘‘An e?cient simulation methodology for the design of tra?c lights at intersections in urban areas,’’by published in the Simulation Journal:Transactions of the Society for Modeling and Simulation Inter-national,Sage79(2003)243–251,’’has been ranked on the top of the50 most-frequently-read articles in the Simulation Journal(October2003–February2007);see:
ASCE.
Dr.Omar Al-Bayari is an Assistant Professor in
the Department of Surveying and Geomatics
Engineering at Al-Balqa’Applied University,
Jordan.He worked between1999and2001as
Post Doctor at DISTART Engineering Depart-
ment,University of Bologna,Italy.He obtained
his B.S.in Civil Engineering from the University
of Jordan,and his Ph.D.in Geodetic Sciences
and Topography from the University of Bologna,
Italy,in1998.Dr.Al-Bayari has authored or co-
authored more than?fteen articles in refereed international journals and conferences.His area of research include Geodetic Surveying and GPS Applications,Integration between GPS,GIS and GSM communicationsystems for Automatic Vehicle Location system, Global Geodesy and Geoid determination,and Airborne laser scanning system.
3160 B.Sadoun,O.Al-Bayari/Computer Communications30(2007)3154–3160
jquery对象访问。 Jq对象(dom对象集合)的Eq方法和jq选择器返回的都是是jquery对象,只能使用jquery 方法;Jq对象(dom集合)的get方法和“jq对象[i]”返回的是dom元素对象,只能使用dom方法。 Jq对象的find(selector |obj|ele)和children用来查找子对象和后代对象 Jq对象的find方法用于查找当前jq对象(dom集合)的后代对象,Jq对象的children方法用于查找当前jq对象(dom集合)的子对象对象。这两个方法都只能使用jq对象(dom对象集合)来调用,并且他们返回的也是jq对象。 Jq手册中的api方法都是js对象(dom集合)对象或者$对象的方法。只能使用jq对象(dom 集合)或者$来调用。如each,attr、val,find,children等等 Jq对象的index方法搜索当前集合中的匹配的元素,并返回相应元素的索引值,从0开始计数 如果不给index方法传递参数,那么返回值就是这个jQuery对象集合中第一个元素相对于其同辈元素的位置。 如果参数是一组DOM元素或者jQuery对象,那么返回值就是传递的元素相对于原先集合的位置。 如果参数是一个选择器,那么返回值就是原先元素相对于选择器匹配元素中的位置。如果找不到匹配的元素,则返回-1。 Jq选择器 1、个基本选择器: 基本选择器可以拼接一起来选择某组元素,原则: 对同一个元素描述的多个基本选择器中间没有任何间隔。 如div[name=aa]表示name属性等于aa的div元素(元素名选择器div和属性选择器[name=aa]中间没有任何间隔)。 div.cval表示class值等于cval的div元素,表示class值等于cval是div元素(类选择器.cval 和元素名选择器div之间同样没有任何间隔) #id值 .class值 元素名 //属性 [attr]具有aaa属性
2 极大似然参数辨识方法 极大似然参数估计方法是以观测值的出现概率为最大作为准则的,这是一种很普遍的参数估计方法,在系统辨识中有着广泛的应用。 2.1 极大似然原理 设有离散随机过程}{k V 与未知参数θ有关,假定已知概率分布密度)(θk V f 。如果我们得到n 个独立的观测值,21,V V …n V ,,则可得分布密度)(1θV f ,)(2θV f ,…,)(θn V f 。要求根据这些观测值来估计未知参数θ,估计的准则是观测值{}{k V }的出现概率为最大。为此,定义一个似然函数 ) ()()(),,,(2121θθθθn n V f V f V f V V V L = (2.1.1) 上式的右边是n 个概率密度函数的连乘,似然函数L 是θ的函数。如果L 达到极大值,}{k V 的出现概率为最大。因此,极大似然法的实质就是求出使L 达到极大值的θ的估值∧ θ。为了便于求∧ θ,对式(2.1.1)等号两边取对数,则把连乘变成连加,即 ∑== n i i V f L 1)(ln ln θ (2.1.2) 由于对数函数是单调递增函数,当L 取极大值时,lnL 也同时取极大值。求式(2.1.2)对θ的偏导数,令偏导数为0,可得 0ln =??θL (2.1.3) 解上式可得θ的极大似然估计ML ∧ θ。 2.2 系统参数的极大似然估计 设系统的差分方程为 )()()()()(1 1 k k u z b k y z a ξ+=-- (2.2.1) 式中 111()1...n n a z a z a z ---=+++ 1101()...n n b z b b z b z ---=+++ 因为)(k ξ是相关随机向量,故(2.2.1)可写成 )()()()()()(1 11k z c k u z b k y z a ε---+= (2.2.2) 式中 )()()(1 k k z c ξε=- (2.2.3) n n z c z c z c ---+++= 1 11 1)( (2.2.4) )(k ε是均值为0的高斯分布白噪声序列。多项式)(1-z a ,)(1-z b 和)(1-z c 中的系数n n c c b b a a ,,,,,10,1和序列)}({k ε的均方差σ都是未知参数。 设待估参数
极大似然辨识及其MATLAB 实现 摘 要:极大似然参数估计方法是以观测值的出现概率为最大作为准则的,这是一种很普遍的参数估计方法,在系统辨识中有着广泛的应用。本文主要探讨了极大似然参数估计方法以及动态模型参数的极大似然辨识并且对其进行了MATLAB 实现。 关键词:极大似然辨识 MATLAB 仿真 迭代计算 1 极大似然原理 设有离散随机过程}{k V 与未知参数θ有关,假定已知概率分布密度)(θk V f 。如果我们得到n 个独立的观测值,21,V V …n V ,,则可得分布密度)(1θV f ,)(2θV f ,…,)(θn V f 。要求根据这些观测值来估计未知参数θ,估计的准则是观测值{}{k V }的出现概率为最大。为此,定义一个似然函数 ) ()()(),,,(2121θθθθn n V f V f V f V V V L = (1.1) 上式的右边是n 个概率密度函数的连乘,似然函数L 是θ的函数。如果L 达到极大值,} {k V 的出现概率为最大。因此,极大似然法的实质就是求出使L 达到极大值的θ的估值∧ θ。为了 便于求∧ θ,对式(1.1)等号两边取对数,则把连乘变成连加,即 ∑== n i i V f L 1 )(ln ln θ (1.2) 由于对数函数是单调递增函数,当L 取极大值时,lnL 也同时取极大值。求式(1.2)对θ的偏导数,令偏导数为0,可得 ln =??θ L (1.3) 解上式可得θ的极大似然估计ML ∧ θ。 2 系统参数的极大似然估计 设系统的差分方程为 )()()()()(1 1k k u z b k y z a ξ+=-- (2.1) 式中 1 1 1()1...n n a z a z a z ---=+++ 11 01()...n n b z b b z b z ---=+++ 因为)(k ξ是相关随机向量,故(2.1)可写成 )()()()()()(1 11k z c k u z b k y z a ε---+= (2.2) 式中 )()()(1 k k z c ξε=- (2.3)
北京工商大学 《系统辨识》课程上机实验报告(2014年秋季学期) 专业名称:控制工程 上机题目:极大似然法进行参数估计专业班级: 2015年1 月
一 实验目的 通过实验掌握极大似然法在系统参数辨识中的原理和应用。 二 实验原理 1 极大似然原理 设有离散随机过程}{k V 与未知参数θ有关,假定已知概率分布密度)(θk V f 。如果我们得到n 个独立的观测值,21,V V …n V ,,则可得分布密度)(1θV f ,)(2θV f ,…,)(θn V f 。要求根据这些观测值来估计未知参数θ,估计的准则是观测值{}{k V }的出现概率为最大。为此,定义一个似然函数 ) ()()(),,,(2121θθθθn n V f V f V f V V V L = (1.1) 上式的右边是n 个概率密度函数的连乘,似然函数L 是θ的函数。如果L 达到极大值,}{k V 的出现概率为最大。因此,极大似然法的实质就是求出使L 达到极大值的θ的估值∧ θ。为了便于求∧ θ,对式(1.1)等号两边取对数,则把连乘变成连加,即 ∑== n i i V f L 1 )(ln ln θ (1.2) 由于对数函数是单调递增函数,当L 取极大值时,lnL 也同时取极大值。求式(1.2)对 θ的偏导数,令偏导数为0,可得 0ln =??θL (1.3) 解上式可得θ的极大似然估计ML ∧ θ。 2 系统参数的极大似然估计 Newton-Raphson 法实际上就是一种递推算法,可以用于在线辨识。不过它是一种依每L 次观测数据递推一次的算法,现在我们讨论的是每观测一次数据就递推计算一次参数估计值得算法。本质上说,它只是一种近似的极大似然法。 设系统的差分方程为
第一部分HTML DOM简介 1 DOM简介 HTML文档对象模型 HTML文档对象模型(Document Object Model)定义了访问和处理 HTML 文档的标准方法。HTML DOM 把 HTML 文档呈现为带有元素、属性和文本的树结构(节点树)。 什么是 DOM? 通过JavaScript,您可以重构整个HTML文档。您可以添加、移除、改变或重排页面上的项目。 要改变页面的某个东西,JavaScript 就需要获得对 HTML 文档中所有元素进行访问的入口。这个入口,连同对 HTML 元素进行添加、移动、改变或移除的方法和属性,都是通过文档对象模型来获得的(DOM)。 DOM 被分为不同的部分(核心、XML及HTML)和级别(DOM Level 1/2/3) DOM 可被 JavaScript 用来读取、改变 HTML、XHTML 以及 XML 文档。 ?Core DOM 定义了一套标准的针对任何结构化文档的对象 ?XML DOM定义了一套标准的针对XML 文档的对象 ?HTML DOM定义了一套标准的针对HTML 文档的对象 2 DOM节点 节点 根据 DOM,HTML 文档中的每个成分都是一个节点。
DOM 是这样规定的: ?整个文档是一个文档节点 ?每个HTML 标签是一个元素节点 ?包含在HTML 元素中的文本是文本节点 ?每一个HTML 属性是一个属性节点 ?注释属于注释节点 Node层次 节点彼此都有等级关系。 HTML 文档中的所有节点组成了一个文档树(或节点树)。HTML 文档中的每个元素、属性、文本等都代表着树中的一个节点。树起始于文档节点,并由此继续伸出枝条,直到处于这棵树最低级别的所有文本节点为止。 下面这个图片表示一个文档树(节点树): 3 DOM节点树 文档树(节点数)
什么是DOM? 通过JavaScript,您可以重构整个HTML文档。您可以添加、移除、改变或重排页面上的项目。 要改变页面的某个东西,JavaScript就需要对HTML文档中所有元素进行访问的入口。这个入口,连同对HTML元素进行添加、移动、改变或移除的方法和属性,都是通过文档对象模型来获得的(DOM)。 在1998年,W3C发布了第一级的DOM规范。这个规范允许访问和操作HTML页面中的每一个单独的元素。 所有的浏览器都执行了这个标准,因此,DOM的兼容性问题也几乎难觅踪影了。 DOM可被JavaScript用来读取、改变HTML、XHTML以及XML文档。 DOM被分为不同的部分(核心、XML及HTML)和级别(DOM Level 1/2/3): Core DOM 定义了一套标准的针对任何结构化文档的对象 XML DOM 定义了一套标准的针对XML文档的对象 HTML DOM 定义了一套标准的针对HTML文档的对象。 HTML DOM 节点 HTML文档中的每个成分都是一个节点。 节点 根据DOM,HTML文档中的每个成分都是一个节点。 DOM是这样规定的: ?整个文档是一个文档节点 ?每个HTML标签是一个元素节点 ?包含在HTML元素中的文本是文本节点 ?每一个HTML属性是一个属性节点
注释属于注释节点 Node 层次 节点彼此都有等级关系。 HTML文档中的所有节点组成了一个文档树(或节点树)。HTML文档中的每个元素、属性、文本等都代表着树中的一个节点。树起始于文档节点,并由此继续伸出枝条,直到处于这棵树最低级别的所有文本节点为止。 文档树(节点数) 请看下面这个HTML文档: