第六章轮系计算题专项训练(答案)
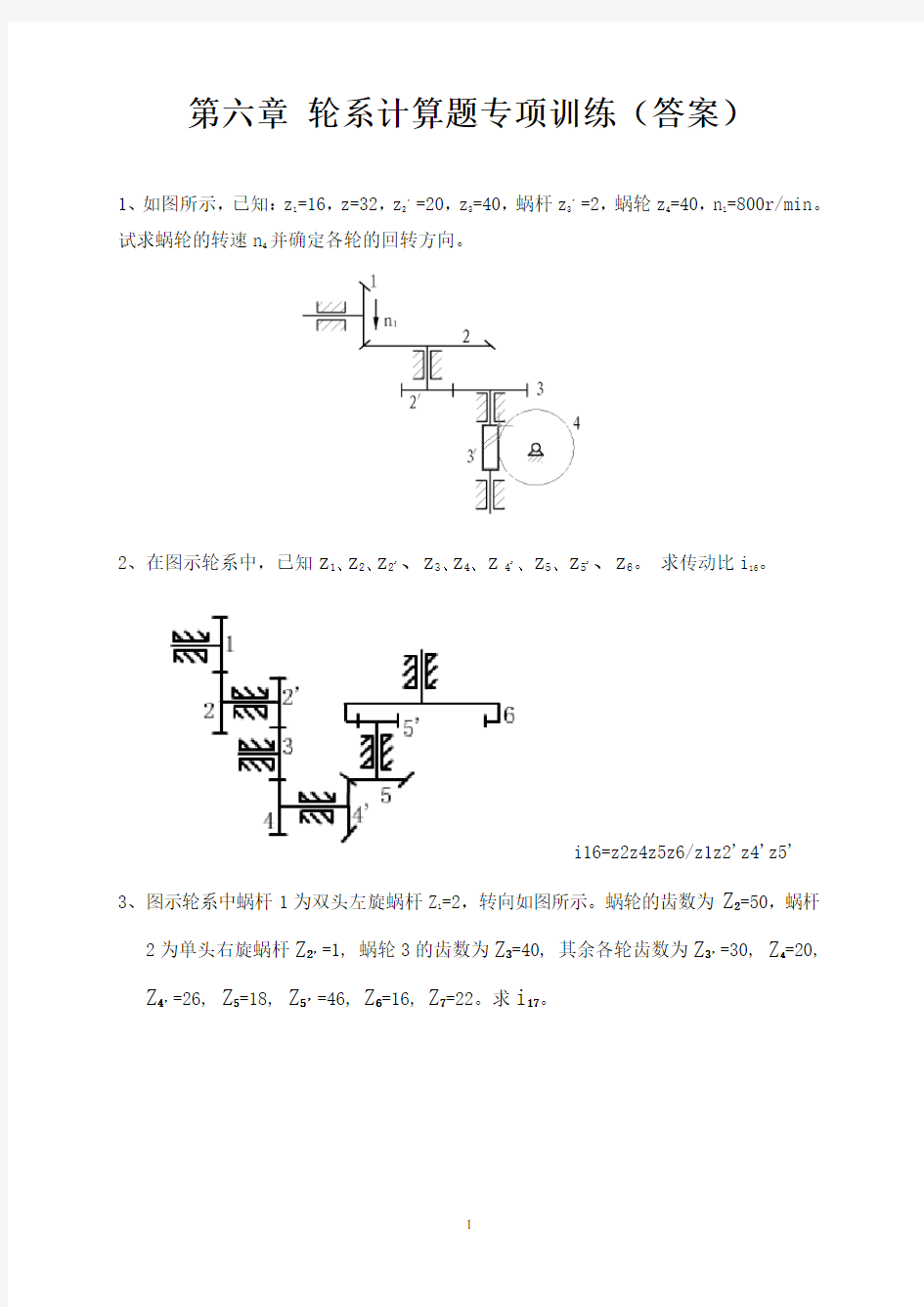
1、如图所示,已知:z
1=16,z=32,z
2
,=20,z
3
=40,蜗杆z
3
,=2,蜗轮z
4
=40,n
1
=800r/min。
试求蜗轮的转速n
4
并确定各轮的回转方向。
2、在图示轮系中,已知z1、z2、z2'、z
3、z
4、z4'、z
5、z5'、z6。求传动比i16。
i16=z2z4z5z6/z1z2'z4'z5'
3、图示轮系中蜗杆1为双头左旋蜗杆Z
1
=2,转向如图所示。蜗轮的齿数为Z2=50,蜗杆2为单头右旋蜗杆Z2’=1, 蜗轮3的齿数为Z3=40, 其余各轮齿数为Z3’=30, Z4=20, Z4’=26, Z5=18, Z5’=46, Z6=16, Z7=22。求i17。
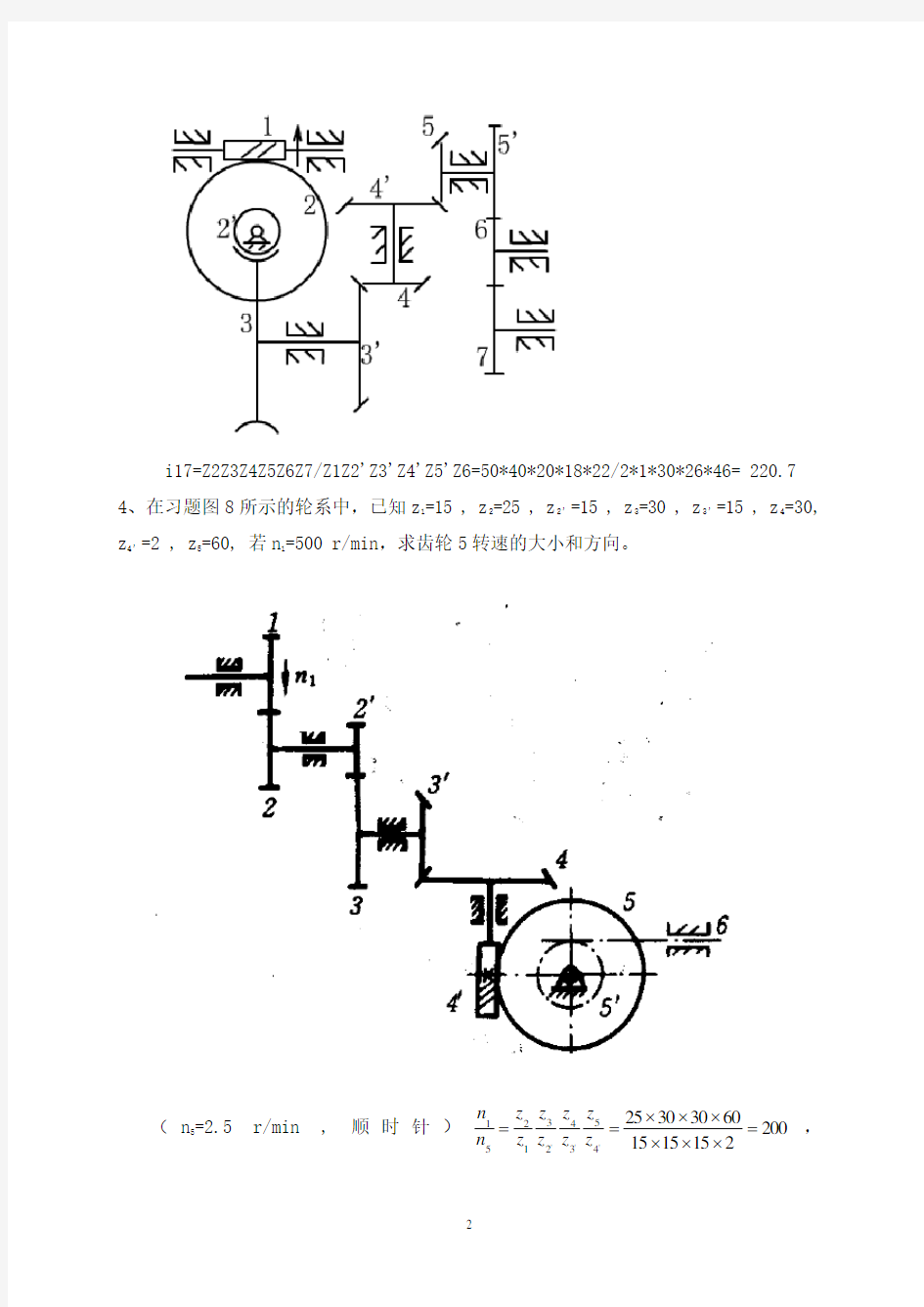
i17=Z2Z3Z4Z5Z6Z7/Z1Z2'Z3'Z4'Z5'Z6=50*40*20*18*22/2*1*30*26*46= 220.7
4、在习题图8所示的轮系中,已知z
1=15 , z
2
=25 , z
2’
=15 , z
3
=30 , z
3’
=15 , z
4
=30,
z 4’=2 , z
5
=60, 若n
1
=500 r/min,求齿轮5转速的大小和方向。
(n
5
=2.5 r/min , 顺时针)200
2
15
15
15
60
30
30
25
4
5
3
4
2
3
1
2
5
1=
?
?
?
?
?
?
=
=
'
'
'
z
z
z
z
z
z
z
z
n
n
,
)/(5.2200
50020015m r n n ===
;齿轮5的方向可以画箭头确定。 5、在图示轮系中,已知z 1、z 2、z 2'、z 3、z 4、 z 4'、
z 5、 z 5'
、z 6。 求传动比i 16。
6、如图所示轮系,已知122344524,46,23,48,35,20,48z z z z z z z ''=======,1O 为主动轴。试计算轮系的传动比15i 并确定齿轮5的转动方向。
7、 在如图所示的轮系中,已知Z 1 =2(右旋),Z 2=60,Z 3=15,Z 4=30,Z 5=15,
Z 6=30,求: (1)该轮系的传动比i 16 =?
(2)若n1=1200 r / min,求轮6的转速大小和方向?
8、图示为一蜗杆传动的定轴轮系,已知蜗杆转速 n1=750r/min ,Z1=3,Z2=60,Z3=18,Z4=27,Z5=20,Z6=50,试用画箭头的方法确定Z6的转向,并计算其转速。
9、图示为卷扬机传动示意图,悬挂重物G的钢丝绳绕在鼓轮5上,鼓轮5与蜗轮 4 联接在一起。已知各齿轮的齿数,Z1 =20,Z2 =60,Z3=2(右旋),Z4=120。试求:
①轮系的传动比i1,4
②若重物上升,加在手把上的力应使轮1如何转动?
10、机械传动系统如图所示,根据图示参数和信息,求运动链末端构件的运动速度或行程并标明其运动方向。(a. n6=26.1r/min,b. n4=7r/min,c. 手柄每转行程:l=2.22mm)
32'1 O 12 3'O 3 O 4 4O 2 第六章 齿轮系及其设计习题解答 6.1 在图示手摇提高装置中,已知各轮齿数为201=z ,502=z ,153=z , 304=z ,406=z 。试求传动比16i 并指出提高重物时手柄转向。 解:2001 152040305053164216=????==z z z z z z i 方向:从左往右看为顺时针方向。 题 6.1 图 题 6.2 图 6.2 在图示轮系中,各轮齿数为201=z ,402=z ,202='z ,303=z ,203='z ,404=z 。试求:(1)传动比i 14;(2)如要变更i 14符号,可采用什么办法? 解: (1) 620 202040304032143214-=????==''z z z z z z i 由于该轮系为空间定轴轮系,其方向只能用画箭头办法判断,又轮4轴线与轮1平行,通过画箭头判断轮4和轮1转向相反,故在传动比前加“—” (2)如要变更i 14符号,可将齿轮3和4变为内啮合齿轮,或在3、4间加一种惰轮。 6.3 在图示机械式钟表机构中,E 为擒纵轮,N 为发条盘,S 、M 、及H 分别为秒针、分针和时针。已知:721=z ,122=z ,643=z ,84=z ,605=z ,86=z ,607=z , 68=z ,89=z ,2410=z ,611=z ,2412=z ,求秒针和分针传动比SM i 和分针与时针传动比MH i 。 解: 该轮系为平面定轴轮系,故有
60886460)1(463524664=??=-====z z z z n n i n n i M S SM 12682424)1(11912102129912=??=-==== z z z z n n i n n i H M MH 题 6.3 图 题 6.4 图 6.4 图示为一滚齿机工作台传动机构,工作台与蜗轮5固联。已知:2011=='z z ,352=z ,505=z 287=z ,蜗杆164==''z z ,旋向如图所示,若要加工一种齿数325='z 齿轮, 试求挂轮组齿数比42z z '。 解:该轮系为空间定轴轮系,故有 120503524432154325115????==='''z z z z z z z z z z n n i =??=== ''''''120322861575151z z z z n n i 又 5115''=i i 联立解得:64 125z 42='z 6.5 在图示轮系中,已知181=z ,302=z ,182='z , 363=z ,183='z ,364=z ,24='z (右旋蜗杆 ),605=z ,205='z ,齿轮模数2=m mm ,若m in 10001r n =(方向如图所示),求齿条6线速度υ大小和方向。
XXXXX学校《机械基础》练习题 一、填空题 1.由一系列相互啮合齿轮所构成的传动系统称为_________. 2.按照轮系传动时各齿轮的轴线位置是否固定,轮系分为________和________两大类. 3.当轮系运转时,所有齿轮几何轴线的位置相对于机架固定不变的轮系称为_______. 4.轮系中,既有定轴轮系又有行星轮系的称为________. 5.采用行星轮系,可以将两个独立的运动_______为一个运动,或将一个运动_______为两个独立的运动.6.轮系中含有圆锥齿轮、蜗轮蜗杆、齿轮齿条,其各轮转向只能用_________的方法表示. 7.定轴轮系中的传动比等于_________的转速之比,也等于该轮系中________与_______之比. 8.在各齿轮轴线相互平行的轮系中,若齿轮的外啮合对数是偶数,则首轮与末轮的转向_______;若为奇数,则首轮与末轮的转向__________. 9.在轮系中,惰轮常用于传动距离稍__________和需要改变________的场合. 10.在轮系中,末端件若是齿轮齿条,它可以把主动件的________运动变为齿条的______运动. 11.轮系的特点:(1)可获得_________的传动比;(2)可实现__________距离传动;(3)可实现________、________要求;(4)可_________或__________运动. 12.平面定轴轮系中传动比计算公式为_________,其中(-1)的n次方,n表示 ________.若(-1) 的n次方为正,则首、末两轮转向____. 13.定釉轮系中任一从动件的转速计算公式为______________________. 14.定轴轮系末端通常有下列三种传动形式,则末端件的移动速度v(或移动距离L)的计算公式分别为: (1)末端为螺旋传动时:________________ (2)末端为滚动轮传动时:______________ (3)末端为齿轮齿条传动时:_____________ 二、单选题 1.若齿轮与轴之间( ),则齿轮与轴各自转动,互不影响. A.空套 B.固定 c.滑移 D.空间配合 2.如图所示的轮系中,设已知Z1= Z2=Z3′=Z4= 20,Z3=Z5= 60,又齿轮1、3、3′与5同轴线,试求传动比i15。( ) A.3 B.6 C.9 D. 12 3.汽车后桥传动轴部分组成的轮系为( ) A.平面定轴轮系 B.空间定轴轮系 c.周转轮系 D.都有可能 4.定轴轮系传动比大小与轮系中惰轮的齿数 ( ) A.无关 B.有关,成正比 C.有关,成反比D.有关,不成比例 5.若主动轴转速为1 200 r/min,若要求从动轴获得12 r/min的转速,应采用( )传动. A. -对直齿圆柱齿轮 B.链 c.轮系 D.蜗轮蜗杆6.关于轮系的说法,正确的是 ( ) A.所有机械传动方式中,轮系的传动比最大 B.轮系靠惰轮变速,靠离合器变向 C.周转轮系只能实现运动的合成与分解 D.轮系的传动比,是构成该轮系所有机械传动方式传动叱的连乘积 7.在轮系中,两齿轮间若增加( )个惰轮时,首、末两轮的转向相同. A.奇数 B.偶数 c.任意数 D.以上都可以 8.轮系的末端是螺旋传动,已知末端轴转速行n=80 r/min,三线螺杆的螺距为4 mm,则螺母每分钟移动距离为( )mm. A. 240 B.320 C.960 D. 160 9.轮系的末端是齿轮齿条传动,已知小齿轮的模数,m=3 mm,齿数z=25,末轴转速n=75r/mln,则齿条每分钟移动的距离为( )mm. A.17662.5 B.5625 C.5887.5 D.8331 10.如图所示轮系,Ⅳ轴可得到几种转速( ) A.3种 B.6种 C.9种 D.12种 三、计算题 1.如图所示为多刀半自动车床主轴箱传动系统.已知带轮直径D1=D2-=180 mm,z1=45,z2=72,z3=36,z4 =81,z5 =59,z6 =54,z7=25,z8=88.试求当电动机转速n=1443 r/min时,主轴Ⅲ的各级转速.
福建专升本复习资料(二) 轮系计算 1. z z z试求在同一时间内当构件 1和 3 的转数分别为 n n设 2. 在图示的轮系中,设 1= 2=30,3=90,1=1, 3=-1(逆时针为正 )时, nH 及 i1H 的值。 3.图示为一电动卷扬机的减速器运动简图,已知各轮齿数 ,试求 : 传动比 i15。 4.在图示的电动三爪卡盘传动轮系中,设已知各轮齿数为:Z1=30, Z2=Z2’ =35,Z3=90, Z4=60,求传动比i14。 5.在图示轮系中,已知:Z1=22,Z 3=88,Z 3’=Z 5,试求传动比 i15。
6.图示为双螺旋桨飞机的减速器中,已知:Za=26,Z b=66,Zg=20,Za’=30,Zg’= 18,Zb’=66,若na=15000rpm时,求 np 及 nQ 的大小及转向。 7.图示为一种大速比减速器的示意图 , 动力由齿轮 1 处输入 , H 处输出 .已知各轮齿数为 :Z1=12, Z2=48, Z3=72, Z2’ =48,Z3’ =96,Z4=12, 试求传动比 i1H 。 8.如图所示轮系机构中,已知:Z 2=Z 5=30,Z 2’= 22.各齿轮模数均相同,试求传动比 i54。 9.图示为用于自动化照明灯具上的轮系,已知输入轴转速 n1=19.5rpm, 各轮的齿数分别为:Z1=60,Z2=Z 2’=30,Z 3=Z 4=40,Z 5=120,试求箱体的转速? 10. 图示的轮系中,已知各轮齿数为Z1=60,Z 2=20,Z 2’=20,Z 3=Z 4= 20,Z 5=100,试求
传动比 i41? 11. 在图示的混合轮系中,已知Z 1=Z 5’=1,Z 3=99,Z 4’= 101,Z 2=Z 4=Z 5=Z 6=100,各轮的模数相同,压力角相等.求: 1、i16 2、若 w1 顺时针方向转动,那么 w 6的转向如何? 3、回归轮系, 3- 4- 4’ -5中,为满足同心条件,应采用哪种变位传动方案较好?为什么?若此回归 轮系既要满足同心条件,又要保证实现标准齿轮传动应采用什么方法? 4、若已知蜗杆 1,蜗轮 2 组成的传动中,它们的模数 m =2mm,蜗杆特性系数 q=13, 那么蜗杆、蜗轮传动 的中心距 a12=? 12. 图示轮系中蜗杆 1 为双头左旋蜗杆 Z 1=2,转向如图所示。蜗轮的齿数为 Z 2=50,蜗杆 2 为单头右 旋蜗杆 Z 2’ 蜗轮 3 的齿数为 3 =40, 其余各轮齿数为 3’44’55’6 =1, Z Z =30, Z =20, Z =26, Z =18, Z =46, Z =16, Z =22。求 i 。 7 17 13. 在图示传动系统中,件 1、 5 为蜗杆,件 2、 6 为蜗轮,件 3、4 为斜齿轮,件 7、 8 为锥齿轮。已知蜗杆 1 为主动,要求输出轮 8 的回转方向如图示。试确定: 1)各轴的回转方向(画在图上) ; 2)考虑Ⅰ、Ⅱ、Ⅲ轴上所受轴向力能抵消一部分, 定出各轮的螺旋线方向(画在图上) ; 3)画出各轮的轴向力的方向,并画出轮 4 所受的力。
第六章轮系计算题专项训练(答案) 1、如图所示,已知:z 1=16,z=32,z 2 ,=20,z 3 =40,蜗杆z 3 ,=2,蜗轮z 4 =40,n 1 =800r/min。 试求蜗轮的转速n 4 并确定各轮的回转方向。 2、在图示轮系中,已知z1、z2、z2'、z 3、z 4、z4'、z 5、z5'、z6。求传动比i16。 i16=z2z4z5z6/z1z2'z4'z5' 3、图示轮系中蜗杆1为双头左旋蜗杆Z 1 =2,转向如图所示。蜗轮的齿数为Z2=50,蜗杆2为单头右旋蜗杆Z2’=1, 蜗轮3的齿数为Z3=40, 其余各轮齿数为Z3’=30, Z4=20, Z4’=26, Z5=18, Z5’=46, Z6=16, Z7=22。求i17。
i17=Z2Z3Z4Z5Z6Z7/Z1Z2'Z3'Z4'Z5'Z6=50*40*20*18*22/2*1*30*26*46= 220.7 4、在习题图8所示的轮系中,已知z 1=15 , z 2=25 , z 2’=15 , z 3=30 , z 3’=15 , z 4=30, z 4’=2 , z 5=60, 若n 1=500 r/min ,求齿轮5转速的大小和方向。 (n 5=2.5 r/min , 顺时针) 2002 15151560 3030254534231251=??????=='''z z z z z z z z n n ,)/(5.2200 500 20015m r n n === ;齿轮5的方向可以画箭头确定。
5、在图示轮系中,已知z 1、z 2、z 2'、z 3、z 4、 z 4'、 z 5、 z 5' 、z 6。 求传动比i 16。 6、如图所示轮系,已知122344524,46,23,48,35,20,48z z z z z z z ''=======,1O 为主动轴。试计算轮系的传动比15i 并确定齿轮5的转动方向。 7、 在如图所示的轮系中,已知Z 1 =2(右旋),Z 2=60,Z 3=15,Z 4=30,Z 5=15, Z 6=30,求: (1)该轮系的传动比i 16 =? (2)若n 1=1200 r / min ,求轮6的转速大小和方向?
第五章 轮系 题5-1 图示轮系中,已知1轮 转向n 1如图示。各轮齿数为:Z 1=20, Z 2=40,Z 3= 15,Z 4=60,Z 5=Z 6= 18, Z 7=1(左旋蜗杆),Z 8 =40,Z 9 =20 。 若n 1 =1000 r/min ,齿轮9的模数 m =3 mm ,试求齿条10的速度v 10 及 其移动方向(可在图中用箭头标出)。 解题分析: 判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的位置都是固定的,但 有轴线相互不平行的空间齿轮传动,故为空间定轴轮系。 确定传动比计算式:其传动比的大小仍可用式(6-1)计算,但转向只能用画箭头的方法确定。 解答: 1.确定齿条10的速度v 10 大小 ∵ 320118152040186040753186428118=??????=== z z z z z z z z n n i ∴ min /125.3min /3201000 18189r r i n n n === = s /mm .s /mm .n mz n d v v 82960125 320360609999910=???π=π=π= = 2.确定齿条10移动方向根据圆柱齿轮传动、锥齿轮传动及蜗杆传动的转向关系,可 定出蜗轮转向n 8为逆时针方向,齿轮9与蜗轮8同轴,n 9 = n 8,齿条10线速度v 10与9轮线速度v 9方向一致,故齿条10的移动方向应朝上(↑)
题5-2 图示轮系中,已知蜗杆1 Z 2= 50 ;蜗杆2′为单头右旋蜗杆, 蜗轮3的齿数为Z 3=40;其余各轮齿 数为;Z 3′=30,Z 4 = 20 ,Z 4′ = 26 , Z 5 =18,Z 5′=28,Z 6=16,Z 7=18。要求: (1) 分别确定蜗轮2、蜗轮3的 轮齿螺旋线方向及转向n 2、n 3 ; (2) 计算传动比i 17 ,并确定齿 轮7的转向n 7。 解题分析: 判定轮系类型:因在轮系运转 时,所有齿轮的轴线相对于机架的 位置都是固定的,但有轴线相互不 平行的空间齿轮传动,故为空间定 轴轮系。 确定传动比计算式:空间定轴 轮系的传动比大小仍可用教材(5-1) 式计算,但转向只能用画箭头的方法 确定。 解答: 1.确定蜗轮2、蜗轮3的轮齿 螺旋线方向:根据蜗杆传动正确啮 合条件21βγ= ,32βγ=' ,可确定蜗轮2为左旋,蜗轮3为右旋。 蜗轮2、3转向:根据 蜗轮蜗杆的相对运动关系,确定转向n 2、n 3如题解5-2 图所示。 2.传动比i 17: 7.2962826301218 182040506543217654327117=????????=== ''''z z z z z z z z z z z z n n i 3.7轮的转向:在题5 - 2 图上用画箭头的方法,可定出n 7 的方向朝上(即↑),因 7轮轴线与蜗杆1轴线平行,故也可说n 7与n 1转向相同。
机械原理自测题库——分析计算题(共88题) 1、试计算图示机构的自由度(若有复合铰链、局部自由度或虚约束,必须明确指出)。并判断该机构的运动是否确定(标有箭头的机构为原动件)。若其运动是确定的,要进行杆组分析,并显示出拆组过程,指出各级杆组的级别、数目以及机构的级别。 图 a) 图b) 题 1 图 2、计算图示机构自由度,并判定该机构是否具有确定的运动(标有箭头的构件为原动件)。 图 a) 图 b) 题 2 图
3、计算图示机构自由度,并确定应给原动件的数目。 图 a 图b 题 3 图 4、在图示机构中试分析计算该机构的自由度数,若有复合铰链、局部自由度或虚约束,则在图上明确指出。 图a 图b 题 4 图 5、计算图示机构的自由度,并作出它们仅含低副的替代机构。
图 a) 图 b) 题 5 图 6、试计算图示机构的自由度。(若有复合铰链、局部自由度或虚约束,必须明确指出。)并指出杆组的数目与级别以及机构级别。 G L 题 6 图 7、计算下列机构的自由度(有复合铰链、虚约束和局部自由度请指出) 图 a) 图 b) 题 7 图
8、图示的铰链四杆机构中,已知mm l AB 65=,mm l CD 90=,mm l AD 125=, s rad mm l BC /10,1251==ω,顺时针转动,试用瞬心法求: 1)当φ=15°时,点C 的速度V C ; 2)当φ=15°时,构件BC 上(即BC 线上或其延长线上)速度最小的一点E 的位置及其速度值。 题 8 图 9、在图示的凸轮机构中,已知凸轮1以等角速度ω1=10rad/s 转动。凸轮为一偏心圆,其半径R 1=25mm ,L AB =15mm ,L AD =50mm ,φ1=90°,试用瞬心法求机构2的角速度ω2。 题 9 图 10 、 在 图 示 机 构 中 , 已 知 长 度 L AB =L BC =20 mm ,L CD =40mm ,∠a=∠β=90°W 1=100(1/S),请用速度瞬心法求C 点的速度的大小和方向
第六章轮系(A卷) 年级第学期专业班级《机械基础》课程 提示: (1)考试时间为100分钟。满分值为100分。 (2)请把答案填入答题纸的相应位置。 一、填空题:(每空1分,共10分) 1.在轮系中,惰轮常用于传动和需要改变的场合。 2.定轴轮系中的传动比等于之比,也等于该轮系中与之比。 3.对于轮系中含有圆锥齿轮、蜗轮蜗杆、齿轮齿条,其各轮转向只能用的方法表示。 4.在各齿轮轴线相互平行的轮系中,若齿轮的啮合对数是偶数,则首轮与末轮的转向;若为奇数,首轮与末轮的转向。 5.由一系列相互啮合齿轮所构成的传动系统称为。 6.当轮系运转时,所有齿轮的几何轴线的位置相对于机架固定不变的轮系称为。 二、单选题:(每题1分,共10分) 1.轮系的末端是螺旋传动,已知末轴转速k n=80r/min,三线螺杆的螺距为 4mm,则螺母每分钟移动距离为()mm。 A.240 B.320 C.960 2.当两轴相距较远,且要求瞬时传动比准确,应采用()传动。 A.带B.链C.轮系 3.轮系采用惰轮的主要目的是使机构具有()功能。 A.变速B.变向C.变速和变向 4.在轮系中,若齿轮与轴各自转动,互不影响,则齿轮与轴之间的位置关系是()A.空套B.固定C.滑移 5.在轮系中,齿轮与轴之间滑移,是指齿轮与轴周向固定,齿轮可沿()滑移。 A.周向B.轴向C.纵向 6.在轮系中,()既可以是主动轮又可以是从动轮,对总传动比没有影响,起改变末端件回转方向的作用。 A.惰轮B.蜗轮蜗杆C.锥齿轮 7.定轴轮系传动比大小与轮系中惰轮的齿数()。 A.无关B.有关,成正比C.有关,成反比 8.轮系的末端是齿轮齿条传动,已知小齿轮的模数m=3mm,齿数 z = 25 ,末轴转速n k=75r/min,则齿条每分钟移动的距离为()mm。 A.17662.5 B.5625 C.5887.5 9.主动轴转速为1200r/min,若要求从动轴获得12r/min的转速,应采用()传动。 A.一对直齿圆柱齿轮B.链C.轮系 10.在轮系中,两齿轮间若增加()个惰轮时,首、末两轮的转向相同。 A.1 B.2 C.4 三、判断题:(每题1分,共12分) 1.轮系既可以传递相距较远的两轴之间的运动,又可以获得很大的传动比。() 2.在轮系中,某一个齿轮,既可以是前级的从动轮,又可以是后级的主动轮。() 3.采用轮系,可使结构紧凑,缩小传动装置的空间,节约材料。() 4.在轮系中,齿轮与轴之间固定,是指齿轮与轴一同转动,且齿轮能沿轴向移动。() 5.轮系中,若各齿轮轴线相互平行时,则可用画箭头的方法确定从动轮转向,也可用外啮合的齿轮对数确定。() 6.采用轮系传动可以获得很大的传动比。() 7.轮系可以方便地实现变速要求,但不能实现变向要求。()
第六章 轮系及其设计 计算及分析题 1、已知:Z 1=30,Z 2=20,Z 2’=30,Z 3 = 25,Z 4 = 100,求i 1H 。 2、图示轮系,已知各轮齿数Z 1=18, Z 2= Z 4=30,Z 3=78,Z 5=76,试计算传动比i 15。 1 2 3 4 5 H | 3、在图示轮系中,已知各轮齿数为Z 1=Z 3=30,Z 2=90,Z 2’=40,Z 3’=40,Z 4=30,试求传动比i 1H ,并说明I 、H 轴的转向是否相同 — 4、在图示轮系中,已知各轮齿数为Z 1 =15,Z 2=20, Z 2’ = Z 3’= Z 4=30, Z 3=40,Z 5= 90,试求传动比i 1 H ,并说明H 的转向是否 和齿轮1相同 1 I 2 2’ 33’ 4 H
5、在图示轮系中,已知各轮的齿数为Z 1= 20, Z 2=30,Z 3=80, Z 4=25,Z 5=50,试求传动比i 15。 6、在图示轮系中,已知各轮齿数为Z 1=19,Z 2=76, Z 2’= 40,Z 3=20,Z 4= 80,试求传动比i 1H 。 7、在图示轮系中,已知各轮齿数为Z 1= 20,Z 2’= 25,Z 2= Z 3=30,Z 3’= 20,Z 4=75,试求: (1)轮系的传动比i 1H 。 (2)若n 1=1000r/min ,转臂H 的转速n H = | 1 2 2’ 3 4 5 [ 3’ 4 5 1 2 { H 1 2 3 2’ 3’ 4 H
8、已知图示轮系中各轮的齿数Z 1=20,Z 2=40,Z 3=15,Z 4=60,轮1的转速为n 1=120 r/min ,转向如图。试 求轮3的转速n 3 的大小和转向。 @ 9、在图示轮系中,已知各轮齿数为Z 1= Z 3= Z 4=20,Z 2=40,Z 5= 60, n 1 = 800r/min ,方向如图所示,试求n H 的大小及转向。 10、在图示轮系中,已知各轮齿数为Z 1=16 ,Z 2=24, Z 2’= 20,Z 3=40,Z 3’= 30, Z 4= 20,Z 5=70试求轮系的传动比i 1H 。 11、在图示轮系中,已知各轮齿数为Z 1= 15,Z 2=25,Z 2’= 20,Z 3=60,Z 4=10,Z 5=30,n 1=200r/min ,n 3=50r/min ,试求n 1、n 3转向相反时,n 5=。 1 2 3 H 4 5 n 1 1 2 3 H 2’ 3’ \ 45
第六章轮系测试题 姓名分数 一、单项选择题 1、若齿轮与轴各自转动、互不影响则齿轮与轴的关系是( )。 A.空套 B.固定 C.滑移 2、齿轮与轴之间滑移是指齿轮与轴周向固定、齿轮可沿( )。 A.周向滑移 B.轴向滑移 C.周向与轴向滑移 3、在机械传动中为了获得较大的传动比可采用的传动是( )。 A.齿轮 B.蜗杆 C.轮系 4、在机械传动中将主动轴的一种转速变换为从动轴的多种转速或需要改变从动轴的回转方向采用的传动是( )。 A.齿轮 B.蜗杆 C.轮系 5、轮系运转时所有齿轮的几何轴线位置相对于机架固定不变的轮系是( )。 A.定轴轮系 B.周转轮系 C.混合轮系 6、轮系运转时至少有一个齿轮的几何轴线相对于机架的位置是不固定的、而是绕另一个齿轮的几何轴线转动的轮系是( )。 A.定轴轮系 B.周转轮系 C . 混合轮系 7、齿轮在轴上的固定方式有几种( )。 8、齿轮与轴之间固定即齿轮与轴一同转动也不能沿轴向移动的固定方式称为( )。 A.固定 B.空套 C.滑移
9、齿轮与轴滑移是指齿轮可沿轴向方向移动、在周向的方向是齿轮与轴( )。 A.固定 B.空套 C.滑移 10、齿轮与轴一同转动、但齿轮可沿轴向滑移的固定方式称为( )。 A.固定 B.空套 C.滑移 11、可以作较远距离传动的机构是( )。 A.齿轮 B.轮系 C.蜗杆 12、一对外啮合的齿轮传动中、两轮的旋转方向( )。 A.相同 B.相反 C.没关系 13、一对内啮合的齿轮传动中、两轮的旋转方向( )。 A.相同 B.相反 C.没关系 14、利用中间齿轮可以改变从动齿轮的( )。 A.速度 B.转向 C.大小 15、在轮系中各齿轮轴线互相平行时、若外啮合齿轮的对数是偶数则首轮与末轮的转向( )。 A.相同 B.相反 C.没关系 16、在轮系中对总传动比毫无影响但起到改变齿轮副中从动轮回转方向作用的齿轮被称为( )。 A.主动轮 B.从动轮 C.惰轮 17、定轴轮系传动比大小与轮系中惰轮的齿数( )。 A.无关 B.成正比 C.成反比 18、若主动轴转速为1200r/min、若要求从动轴获得12r/min的转速应采用的传动是( )。 A.一对直齿圆柱齿轮 B.链 C.轮系
试题题型:计算题 一、计算图示机构的自由度,并判断机构是否具有确定的运动。 (如有复合铰链、虚约束、局部自由度须指出) A B C D E A B D C E A B C D E F G A B C D E F G H I A B C D E F A B C D O E
A B C D E F E A G O F B C D O A B C D E F G H K E A G O F B C D A B C D E F O A B C D E F G O H
A B C D A O B C D E F A B C D O A B C O D E B C A D E F G H I O A O C B H D G I F E
二、轮系的计算 1.在图示轮系中,已知各轮齿数为Z 1=Z 3=30,Z 2=90,Z 2’=40,Z 3’=40,Z 4=30, 试求传动比i 1H ,并说明I、H轴的转向是否相同? 2.在图示轮系中,已知各轮齿数为Z 1 =15,Z 2=20, Z 2’ = Z 3’= Z 4=30, Z 3=40, Z 5= 90,试求传动比I ⅠⅡ,并说明I、Ⅱ轴的转向是否相同? 3.在图示轮系中,已知各轮的齿数为Z 1= 20, Z 2=30,Z 3=80, Z 4=25,Z 5=50,试求传动比i 15。 1 Ⅰ 2 2’ 3 3’ 4 H 1 2 2’ 3 4 5 3’ Ⅰ Ⅱ 4 1 2 3 H 1 2 3’ H 4
4.在图示轮系中,已知各轮齿数为Z 1= 55, Z 2=11,Z 3=77,Z 3’=49,Z 4=12,Z 5=73,试求传动比i 1H 。 5.在图示轮系中,已知各轮齿数为Z 1= Z 2= 30,Z 3= 40,Z 4=20,Z 5=18,Z 6=38,试求传动比i 1H 。 6.在图示轮系中,已知各轮齿数为Z 1= Z 2’= 20,Z 2=40,Z 3= 80,试求传动比i 1H 。 2 5 6 4 3 1 3 1 2’ H
已知各轮齿数为 Z i = 20,Z 2 = 50,Z 3 = 15, z 4 =30 , z 6 = 40。试求传动比i i6并指出提升重物时手柄的转向。 Z 1Z 3Z 5 20 15 1 方向:从左往右看为顺时针方向。 Z 4 =40。试求:(1)传动比i 14;(2)如要变更i 14的符号,可采取什么措施? 解:(1) i Z 2Z 3Z 4 40 30 40 14 、Z 2Z 3= 20 20 20 八 6 由于该轮系为空间定轴轮系,其方向只能用画箭头的方法判断,又轮 4的轴线与轮1 平行,通过画箭头判断轮 4和轮1的转向相反,故在传动比前加"一” (2)如要变更 码的符号,可将齿轮3和4变为内啮合齿轮,或在3、4间加一个惰轮。 6.3 在图示的机械式钟表机构中, E 为擒纵轮,N 为发条盘,S 、M 、及H 分别为秒 针、分针和时针。已知:z 1 =72 , z 2 =12 , z 3 = 64, z 4 = 8 , z 5 = 60, z 6 = 8 , z 7 = 60 , Z s =6 , Z 9 =8 ,乙0 =24 , Z 11 =6 , Z 12 = 24,求秒针和分针的传动比i sM 和分针与时 针的传动比i MH 。 解: 该轮系为平面定轴轮系,故有 第六章 齿轮系及其设计习题解答 Z 2Z 4Z 6 50 30 40 = 200 i SM 6.1在图示的手摇提升装置中, O i Z i = 20, 2' O 2 ][ 题6.2图 一 0 4 O 3 Z 2 = 40, Z 2 = 20, Z 3 = 30, Z 3 =20,
n s n M =i64 吕十1)2 n4z6z48 8 _“M _i i MH 二-i 912 “H 匹 n12 = (T) 2 乙0乙2 Z9Z11 24 24 8 6
1.一队外啮合齿轮标准直齿圆柱挂齿轮传动,测得其中心距为160mm.两齿轮的齿数分 别为Z 1=20,Z 2 =44,求两齿轮的主要几何尺寸。 2.设计一铰链四杆机构,已知其摇杆CD的长度为50mm,行程速比系数K=1.3。 3.有一对标准直齿圆柱齿轮,m=2mm,α=200,Z=25,Z 2=50,求(1)如果n 1 =960r/min, n 2 =?(2)中心距a=?(3)齿距p=? 4.一对标准直齿圆柱齿轮传动,已知两齿轮齿数分别为40和80,并且测得小齿轮的齿顶圆直径为420mm,求两齿轮的主要几何尺寸。 5.某传动装置中有一对渐开线。标准直齿圆柱齿轮(正常齿),大齿轮已损坏,小齿 轮的齿数zz 1=24,齿顶圆直径d a1 =78mm, 中心距a=135mm, 试计算大齿轮的主要几何尺 寸及这对齿轮的传动比。 6.图示轮系中,已知1轮转向n1如图示。各轮齿数为:Z1=20,Z2=40,Z3= 15,Z4=60,Z5=Z6= 18,Z7=1(左旋蜗杆),Z8 =40,Z9 =20 。若n1 =1000 r/min ,齿轮9的模数m =3 mm,试求齿条10的速度v10 及其移动方向(可在图中用箭头标出)。 7.已知轮1转速n1 =140 r/min,Z1=40, Z 2 =20。求: (1)轮3齿数 Z3; (2)当n3 = -40 r/min时,系杆H的转速 n H 的大小及方向;
(3)当n H= 0 时齿轮3的转速n3。 8.一轴由一对7211AC的轴承支承,F r1=3300N, F r2 =1000N, F x =900N, 如图。试求两轴 承的当量动载荷P。(S=0.68Fr e=0.68 X=0.41,Y=0.87) 9.已知一对正确安装的标准渐开线正常齿轮的ɑ=200,m=4mm,传动比i 12 =3,中心距 a=144mm。试求两齿轮的齿数、分度圆半径、齿顶圆半径、齿根圆半径。 10.设计一铰链四杆机构。已知摇杆CD的长度为75mm,行程速比系数K=1.5,机架长度为100mm,摇杆的一个极限位置与机架的夹角为450。 11.设计一对心直动滚子从动件盘形凸轮。已知凸轮基圆半径r b =40mm,滚子半径r=10mm,凸轮顺时针回转,从动件以等速运动规律上升,升程为32mm,对应凸轮推程角为120°;凸轮继续转过60°,从动件不动,凸轮转过剩余角度时,从动件等速返回。 12.已知轮系中各齿轮的齿数分别为Z 1=20、Z 2 =18、 Z 3 =56。求传动比i 1H 。 13.图示轮系,已知Z 1=30,Z 2 =20,Z 2 `=30,`Z 3 =74,且已知n 1 =100转/分。试求n H 。
轮系 1、在图所示轮系中,已知各轮齿数为:。试求传动动比。 2、在图所示轮系中,已知各轮齿数为:Z1=24,Z1'=30,Z2=95,Z3=89,Z3'=102,Z4=80,Z4'=40,Z5=17。试求传动比i15。 3、在图所示的轮系中,已知各轮齿数为:Z1=90,Z2=60,z2'=30,Z3=30,Z3'=24,Z4=18,Z5=60,Z5'=36,Z6=32。运动从A,B两轴输入,由构件H输出。已知n A=100r/min,n B=900r/min转向如图所示。试求输出轴H的转速n H的大小和方向。 1、解:对于由齿轮1,2,3和齿轮5(系杆)所组成的周转轮系(行星轮系),有 由于,故有:
化简后可得:-----(a) 对于由齿轮1’,4,5和系杆H所组成的周转轮系(差动轮系),有 即-----(b) 分析两个基本轮系的联系,可知-----(c) 将(a)、(c)两式代人(b)式,可得 化简整理后可得 计算结果为正,表明从动系杆H和主动齿轮1的转向相同。 2、解:对于由齿轮3',4-4',5和系杆H所组成的周转轮系,有:
即-------(a) 对于由齿轮1-1',2,3所组成的定轴轮系,有: 即:-------(b) 即:------(c) 分析定轴轮系部分与周转轮系部分的联系,可知 故有 -------(d) -------(e) 将(d)(e)两式代人(a)式,得 整理后得: 计算结果i15为正,说明1轮与5轮转向相同。
3、解: 对于由齿轮3',4,5和系杆H组成的周转轮系(差动轮系),有 即: 对于由齿轮1,2,2',3所组成的定轴轮系,有 即: 对于由齿轮5’和6组成的定轴轮系,有 即 分析上述三个基本轮系之间的联系,有
3 2' 1 O 1 2 3'O 3 O 4 4 O 2 第六章 齿轮系及其设计习题解答 在图示的手摇提升装置中,已知各轮齿数为201=z ,502=z ,153=z , 304=z ,406=z 。试求传动比16i 并指出提升重物时手柄的转向。 解:2001 152040 305053164216=????== z z z z z z i 方向:从左往右看为顺时针方向。 题 图 题 图 在图示轮系中,各轮齿数为201=z ,402=z ,202='z ,303=z ,203='z , 404=z 。试求:(1)传动比i 14;(2)如要变更i 14的符号,可采取什么措施 解: (1) 620 202040 304032143214-=????== ''z z z z z z i 由于该轮系为空间定轴轮系,其方向只能用画箭头的方法判断,又轮4的轴线与轮1平行,通过画箭头判断轮4和轮1的转向相反,故在传动比前加“—” (2)如要变更i 14的符号,可将齿轮3和4变为内啮合齿轮,或在3、4间加一个惰轮。 在图示的机械式钟表机构中,E 为擒纵轮,N 为发条盘,S 、M 、及H 分别为秒针、分针和时针。已知:721=z ,122=z ,643=z ,84=z ,605=z ,86=z ,607=z , 68=z ,89=z ,2410=z ,611=z ,2412=z ,求秒针和分针的传动比SM i 和分针与时 针的传动比MH i 。 解: 该轮系为平面定轴轮系,故有 608864 60)1(463524664=??=-==== z z z z n n i n n i M S SM 126 824 24)1(11912102129912=??=-==== z z z z n n i n n i H M MH
图示凸轮机构中,凸轮为一半径R= 20 mm的偏心圆盘,圆盘的几何中心A到转动中心O的距离为e = 10 mm,滚子半径r g = 5 mm,凸轮角速度。试求:(14分) ①凸轮的理论廓线和基圆;②图示位置时机构的压力角; ③凸轮从图示位置转过时的位移S;④图示位置时从动件2的速度v。 ①凸轮的理论廓线和基圆 理论廓线。对于滚子推杆的凸轮机构而言,理论廓线是过滚子中心的一条封闭廓线。题目中给出的是工作廓线,要得到理论廓线,只需要把工作廓线往外偏移一个滚子的半径即可。由于这里工作廓线就是一个以C为圆心,半径为20mm的圆;而滚子的半径是5mm,所以理论廓线就是以C为圆心,半径为20+5=25mm的圆.如下图所示。 基圆。首先我们知道,基圆是在理论廓线上定义的;其次我们懂得,它是以转动中心O 为圆心的,与理论廓线内切的一个半径最小的圆。按照该定义,我们以O为圆心做一个与理论廓线内切的最小的圆如下图,显然,它的半径是10+5=15mm. ②图示位置时机构的压力角; 对于该机构而言,压力角是滚子的中心B点的受力方向与运动方向的夹角。 B点的速度方向。由于B点是推杆与滚子的连接点,所以它也就是推杆上的B点。由于推杆在上下平移,推杆上任何一点的轨迹都是沿着推杆的直线,所以任何一点的速度方向都是推杆直线的方向,因此推杆上的B点速度方向也在该直线上。 B点的受力方向。推杆上的B点与理论廓线接触,在忽略摩擦的前提下,其受力方向其实就是理论力学中的光滑接触面中的反力方向。光滑接触面的反力是公法线方向。由于推杆的B点是尖点,无所谓法线,所以公法线方向就是理论廓线在该点的法线方向。而理论廓线是一个圆,圆上任何一点的法线方向都是从从该点指向圆心的。所以BC的方向就是公法线方向。 显然,速度方向与力的方向重合,所以压力角是0度。这是我们最希望的压力角。压力角越小,则凸轮机构的传力性能越好。
机械原理 第六章 齿轮系及其设计习题解答 6.1 在图示的手摇提升装置中,已知各轮齿数为201=z ,502=z ,153=z , 304=z ,406=z 。试求传动比16i 并指出提升重物时手柄的转向。 解:16= i 题 6.1 6.2 404=z 。试求:(1)传动比i 14;(2)如要变更i 14的符号,可采取什么措施? 解: (1) 620 202040 304032143214-=????== ''z z z z z z i 由于该轮系为空间定轴轮系,其方向只能用画箭头的方法判断,又轮4的轴线与轮1平行,通过画箭头判断轮4和轮1的转向相反,故在传动比前加“—” (2)如要变更i 14的符号,可将齿轮3和4变为内啮合齿轮,或在3、4间加一个惰轮。 6.3 在图示的机械式钟表机构中,E 为擒纵轮,N 为发条盘,S 、M 、及H 分别为秒针、分针和时针。已知:721=z ,122=z ,643=z ,84=z ,605=z ,86=z ,607=z , 68=z ,89=z ,2410=z ,611=z ,2412=z ,求秒针和分针的传动比SM i 和分针与时 针的传动比MH i 。 解: 该轮系为平面定轴轮系,故有 608864 60)1(463524664=??=-==== z z z z n n i n n i M S SM 126 824 24)1(11912102129912=??=-==== z z z z n n i n n i H M MH
题 6.3 图 题 6.4 图 6.4 图示为一滚齿机工作台的传动机构,工作台与蜗轮5固联。已知:2011=='z z , 352=z ,505=z 287=z ,蜗杆164==''z z ,旋向如图所示,若要加工一个齿数32 5='z 的齿轮, 试求挂轮组齿数比42z z '。 解:该轮系为空间定轴轮系,故有 12050 3524432154325115????=== '''z z z z z z z z z z n n i =??=== ''''''1 2032 2861575151z z z z n n i 又 5115''=i i 联立解得: 64 125 z 42='z 6.5 在图示轮系中,已知181=z ,302=z ,182='z , 363=z ,183='z ,364=z , 24='z (右旋蜗杆 ),605=z ,205='z ,齿轮的模数2=m mm ,若m i n 1 0001r n =(方向如图所示),求齿条6的线速度υ的大小和方向。 解:该轮系为空间定轴轮系,故有 200218181860363630432154325115=??????=== ''z z z z z z z z n n i min 5200 1000 15155r i n n n === =' 齿条6的线速度为
第六章 齿轮系及其设计习题解答 6.1 在图示的手摇提升装置中,已知各轮齿数为201=z ,502=z ,153=z , 304=z ,406=z 。试求传动比16i 并指出提升重物时手柄的转向。 解:16= i 题 6.1 6.2 404=z 。试求:(1)传动比i 14;(2)如要变更i 14的符号,可采取什么措施? 解: (1) 620 202040 304032143214-=????== ''z z z z z z i 由于该轮系为空间定轴轮系,其方向只能用画箭头的方法判断,又轮4的轴线与轮1平行,通过画箭头判断轮4和轮1的转向相反,故在传动比前加“—” (2)如要变更i 14的符号,可将齿轮3和4变为内啮合齿轮,或在3、4间加一个惰轮。 6.3 在图示的机械式钟表机构中,E 为擒纵轮,N 为发条盘,S 、M 、及H 分别为秒针、分针和时针。已知:721=z ,122=z ,643=z ,84=z ,605=z ,86=z ,607=z , 68=z ,89=z ,2410=z ,611=z ,2412=z ,求秒针和分针的传动比SM i 和分针与时 针的传动比MH i 。 解: 该轮系为平面定轴轮系,故有 608864 60)1(463524664=??=-==== z z z z n n i n n i M S SM 126 824 24)1(11912102129912=??=-==== z z z z n n i n n i H M MH
题 6.3 图 题 6.4 图 6.4 图示为一滚齿机工作台的传动机构,工作台与蜗轮5固联。已知:2011=='z z , 352=z ,505=z 287=z ,蜗杆164==''z z ,旋向如图所示,若要加工一个齿数32 5='z 的齿轮, 试求挂轮组齿数比42z z '。 解:该轮系为空间定轴轮系,故有 12050 3524432154325115????=== '''z z z z z z z z z z n n i =??=== ''''''1 2032 2861575151z z z z n n i 又 5115''=i i 联立解得: 64 125 z 42='z 6.5 在图示轮系中,已知181=z ,302=z ,182='z , 363=z ,183='z ,364=z , 24='z (右旋蜗杆 ),605=z ,205='z ,齿轮的模数2=m mm ,若m i n 1 0001r n =(方向如图所示),求齿条6的线速度υ的大小和方向。 解:该轮系为空间定轴轮系,故有 200218181860363630432154325115=??????=== ''z z z z z z z z n n i min 5200 1000 15155r i n n n === =' 齿条6的线速度为