
用Labview调用Halcon进行机器视觉编程
用过labview得人都会为labview那强大的界面和其快速的编写程序而惊叹,同样的,使用过halcon得人也会为大恒的这个优秀的软件而震惊。但是,halcon到现在还没有能够直接支持labview的程序组件出现。或许,可能是因为labview有其自己的视觉软件吧!但是即使这样,我们也可以利用halcon提供的.net控件和.com控件,用labview进行调用,同样可以实现halcon那强大的功能,而且,可以利用LabVIEW多线线程的特性,将halcon 发挥的淋漓尽致!不过,因为halcon得COM组件用起来比较麻烦,本人也限于水平,所以只能稍微讲讲如果用halcon的.net控件在LabVIEW调用。
1.加载.net控件
在LabVIEW的控件选板里面选一个.net容器(一个.net图片框也可以),如下图:
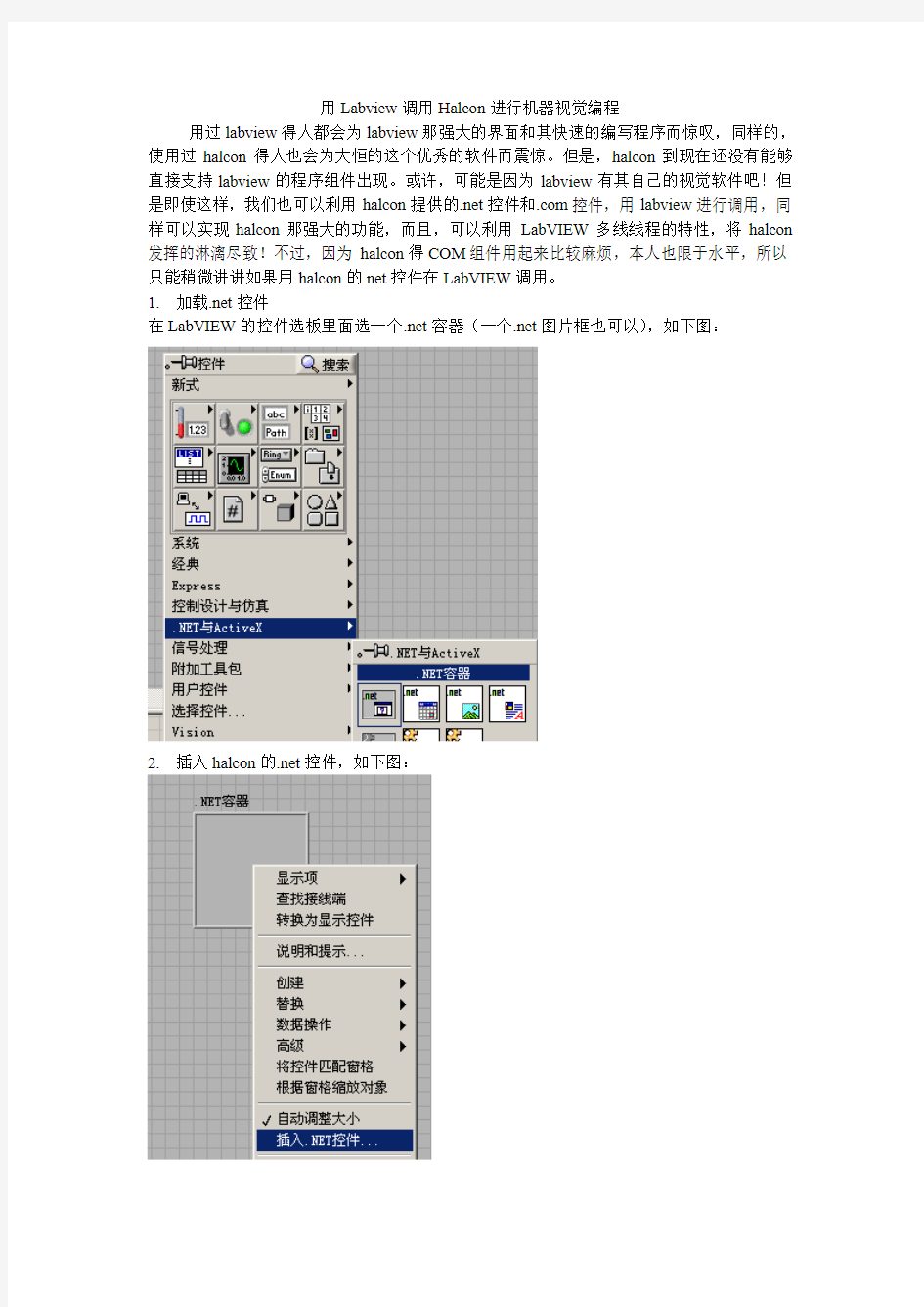
2.插入halcon的.net控件,如下图:
按图选HwindowControl控件,之后点击确定。
点击浏览,找到你Halcon 安装的halcondotnet.dll 控件
这样就将.net控件加载进了LabVIEW里面了。
加上一个属性,就可以找到你想要的类别了。
机器视觉软件HALCON 实验指导书 目录 实验1 HALCON 概述,应用范例 实验2 HDevelop介绍,操作编程范例 实验3 HALCON编程接口,高级语言编程 实验4 HALCON数据结构,采集硬件接口 实验5 HALCON采集硬件配置,图像采集 实验6 HALCON二维测量,配准测量与识别定位 实验7 HALCON一维测量,尺寸测量 实验8 HALCON三维测量,3D重建测量 实验1 HALCON 概述,应用范例 实验2 HDevelop介绍,操作编程范例 1 邮票分割 文件名: stamps.dev 第一个例子进行文件分析任务。图5.1展示了部分邮票目录页。它描述了两种不同的邮票:以图形描述为主和以文字描述为主。 为了使用这个例子,必须把文字描述转化为计算机所能理解的形式。你可能使用OCR编程方式,你很快发现由于邮票的图形描述会导致大多数的可使用模块产生错误。于是另一项任务必须要进行预处理:对所有的邮票进行转化(例如,把邮票转化为灰色有价值的纸),这样就可以使用OCR处
理邮票的剩余部分了。 当创造一个应用程序来解决这种问题,对要处理的对象进行特征提取是非常有帮助的。这个任务可以为新手提供解决的这类问题一些的经验。 ●一般而言,特征提取有如下步骤:邮票比纸要黑。 ●邮票包含图像的部分不重叠。 ●邮票具有最大最小尺寸。 ●邮票是长方形的。
图 5.1: Mi c he l图表的部分页. 如果直接使用属性清单而非编程,任务会变得很简单。可惜由于语言的含糊,这是不可能的。所以你需要建构具有精确的语法和语义的语言,尽可能接近非正式的描述。使用HDevelop语法,一个通常的程序看起来如下: dev_close_window () read_image (Catalog, ’swiss1.tiff’) get_image_pointer1 (Catalog, Pointer, Type, Width, Height) dev_open_window (0, 0,Width/2, Height/2, ’black’, WindowID) dev_set_part (0, 0,Height-1, Width-1) dev_set_draw (’fill’)
机器视觉技术发展现状 人类认识外界信息的80%来自于视觉,而机器视觉就是用机器代替人眼来做 测量和判断,机器视觉的最终目标就是使计算机像人一样,通过视觉观察和理解 世界,具有自主适应环境的能力。作为一个新兴学科,同时也是一个交叉学科,取“信息”的人工智能系统,其特点是可提高生产的柔性和自动化程度。目前机器视觉技术已经在很多工业制造领域得到了应用,并逐渐进入我们的日常生活。 机器视觉是通过对相关的理论和技术进行研究,从而建立由图像或多维数据中获机器视觉简介 机器视觉就是用机器代替人眼来做测量和判断。机器视觉主要利用计算机来模拟人的视觉功能,再现于人类视觉有关的某些智能行为,从客观事物的图像中提取信息进行处理,并加以理解,最终用于实际检测和控制。机器视觉是一项综合技术,其包括数字处理、机械工程技术、控制、光源照明技术、光学成像、传感器技术、模拟与数字视频技术、计算机软硬件技术和人机接口技术等,这些技术相互协调才能构成一个完整的工业机器视觉系统[1]。 机器视觉强调实用性,要能适应工业现场恶劣的环境,并要有合理的性价比、通用的通讯接口、较高的容错能力和安全性、较强的通用性和可移植性。其更强调的是实时性,要求高速度和高精度,且具有非接触性、实时性、自动化和智能 高等优点,有着广泛的应用前景[1]。 一个典型的工业机器人视觉应用系统包括光源、光学成像系统、图像捕捉系统、图像采集与数字化模块、智能图像处理与决策模块以及控制执行模块。通过 CCD或CMOS摄像机将被测目标转换为图像信号,然后通过A/D转换成数字信号传送给专用的图像处理系统,并根据像素分布、亮度和颜色等信息,将其转换成数字化信息。图像系统对这些信号进行各种运算来抽取目标的特征,如面积、 数量、位置和长度等,进而根据判别的结果来控制现场的设备动作[1]。 机器视觉一般都包括下面四个过程:
基于LabVIEW的数据采集与处理系统设计 摘要:虚拟仪器作为一种基于图形化编程的新型概念仪器,以计算机作为运行媒介,节省了大量的显示、控制硬件,越来越显示出它独有的优势。基于LabVIEW的数据采集与处理系统,整体采用了循环结构与顺序结构相结合的形式,实现了模拟信号的采集与实时动态显示,并且仿真出了对数据的采集和报警功能,并且能够存储数据,进行各种自定义设置,显示效果良好,对现实中的数据采集与处理系统具有很大的借鉴作用。 关键词:虚拟仪器;数据采集;数据处理;LabVIEW
The Design of Data Acquisition and Processing System Based on LabVIEW Abstract:As a kind of virtual instrument based on graphical programming the new concept of instruments, run at the computer as a medium, save a large amount of display, control hardware, more and more shows its unique advantages. Data acquisition and processing system based on LabVIEW, and the overall adopted loop structure and order structure, in the form of the combination of the dynamic analog signal acquisition and real-time display, and the simulation of the data collection and alarm function, and the ability to store data, for a variety of Settings, display effect is good, the reality of the data acquisition and processing system has a great reference. Keywords:Virtual Instrument;Data Collection;Data Processing;LabVIEW;
基于机器视觉的工件识别和定位文献综述 1.前言 1.1工业机器人的现状与发展趋势 机器人作为一种最典型的应用范围广、技术附加值高的数字控制装备,在现代先进生产制造业中发挥的作用越来越重要,机器人技术的发展将会对未来生产和社会发展起到强有力的推动作用。《2l 世纪日本创建机器人社会技术发展战略报告》指出,“机器人技术与信息技术一样,在强化产业竞争力方面是极为重要的战略高技术领域。培育未来机器人产业是支撑2l 世纪日本产业竞争力的产业战略之一,具有非常重要的意义。” 研发工业机器人的初衷是为了使工人能够从单调重复作业、危险恶劣环境作业中解脱出来,但近些年来,工厂和企业引进工业机器人的主要目的则更多地是为了提高生产效率和保证产品质量。因为机器人的使用寿命很长,大都在10 年以上,并且可以全天后不间断的保持连续、高效地工作状态,因此被广泛应用于各行各业,主要进行焊接、装配、搬运、加工、喷涂、码垛等复杂作业。伴随着工业机器人研究技术的成熟和现代制造业对自动生产的需要,工业机器人越来越被广泛的应用到现代化的生产中。 现在机器人的价格相比过去已经下降很多,并且以后还会继续下降,但目前全世界范围的劳动力成本都有所上涨,个别国家和地区劳动力成本又很高,这就给工业机器人的需求提供了广阔的市场空间,工业机器人销量的保持着较快速度的增长。工业机器人在生产中主要有机器人工作单元和机器人工作生产线这两种应用方式,并且在国外,机器人工作生产线已经成为工业机器人主要的应用方式。以机器人为核心的自动化生产线适应了现代制造业多品种、少批量的柔性生产发展方向,具有广阔的市场发展前景和强劲生命力,已开发出多种面向汽车、电气机械等行业的自动化成套装备和生产线产品。在发达国家,机器人自动化生产线已经应用到了各行各业,并且已经形成一个庞大的产业链。像日本的FANUC、MOTOMAN,瑞典的ABB、德国的KUKA、意大利的COMAU 等都是国际上知名的被广泛用于自动化生产线的工业机器人。这些产品代表着当今世界工业机器人的最高水平。 我国的工业机器人前期发展比较缓慢。当将被研发列入国家有关计划后,发展速度就明显加快。特别是在每次国家的五年规划和“863”计划的重点支持下,我国机器人技术的研究取得了重大发展。在机器人基础技术和关键技术方面都取得了巨大进展,科技成果已经在实际工作中得到转化。以沈阳新松机器人为代表的国内机器人自主品牌已迅速崛起并逐步缩小与国际品牌的技术差距。 机器人涉及到多学科的交叉融合,涉及到机械、电子、计算机、通讯、控制等多个方面。在现代制造业中,伴随着工业机器人应用范围的扩大和机器人技术的发展,机器人的自动化、智能化和网络化的程度也越来越高,所能实现的功能也越来越多,性能越来越好。机器人技术的内涵已变为“灵活应用机器人技术的、具有实在动作功能的智能化系统。”目前,工业机器人技术正在向智能机器和智能系统的方向发展,其发展趋势主要为:结构的模块化和可重构化;控制技术的开放化、PC 化和网络化;伺服驱动技术的数字化和分散化;多传感器融合技术的实用化;工作环境设计的优化和作业的柔性化以及系统的网络化和智能化等方面。 1.2机器视觉在工业机器人中的应用 工业机器人是FMS(柔性加工)加工单元的主要组成部分,它的灵活性和柔性使其成为自动化物流系统中必不可少的设备,主要用于物料、工件的装卸、分捡和贮运。目前在全世界有数以百万的各种类型的工业机器人应用在机械制造、零件加工和装配及运输等领域,
基于机器视觉的产品检测技术研究 1、机器视觉 1.1机器视觉的概念 机器视觉被定义为用计算机来模拟人的视觉功能,从客观事物的图像中提取信息,进行处理并加以理解,最终用于实际检测、测量和控制。一个典型的工业机器视觉应用系统包括光源、光学系统、图像采集系统、数字图像处理与智能判断决策模块和机械控制执行模块。系统首先通过CCD相机或其它图像拍摄装置将目标转换成图像信号,然后转变成数字化信号传送给专用的图像处理系统,根据像素分布!亮度和颜色等信息,进行各种运算来抽取目标的特征,根据预设的容许度和其他条件输出判断结果。 值得一提的是,广义的机器视觉的概念与计算机视觉没有多大区别,泛指使用计算机和数字图像处理技术达到对客观事物图像的识别、理解。而工业应用中的机器视觉概念与普通计算机视觉、模式识别、数字图像处理有着明显区别,其特点是: 1、机器视觉是一项综合技术,其中包括数字图像处理技术、机械工程技术、控制技术、电光源照明技术,光学成像技术、传感器技术、模拟与数字视频技术、计算机软硬件技术、人机接口技术等。这些技术在机器视觉中是并列关系。相互协调应用才能构成一个成功的工业机器视觉应用系统。 2、机器视觉更强调实用性,要求能够适应工业生产中恶劣的环境,要有合理的性价比,要有通用的工业接口,能够由普通工作者来操作,有较高的容错能力和安全性,不会破坏工业产品,必须有较强的通用性和可移植性。 3、对机器视觉工程师来说,不仅要具有研究数学理论和编制计算机软件的能力,更需要光、机、电一体化的综合能力。 4、机器视觉更强调实时性,要求高速度和高精度,因而计算机视觉和数字图像处理中的许多技术目前还难以应用于机器视觉,它们的发展速度远远超过其在工业生产中的实际应用速度。 1.2机器视觉的研究范畴 从应用的层面看,机器视觉研究包括工件的自动检测与识别、产品质量的自动检测、食品的自动分类、智能车的自主导航与辅助驾驶、签字的自动验证、目标跟踪与制导、交通流的监测、关键地域的保安监视等等。从处理过程看,机器视觉分为低层视觉和高层视觉两阶段。低层视觉包括边缘检测、特征提取、图像分割等,高层视觉包括特征匹配、三维建模、形状分析与识别、景物分析与理解等。从方法层面看,有被动视觉与主动视觉之,又有基于特征的方法与基于模型的方法之分。从总体上来看,也称作计算机视觉。可以说,计算机视觉侧重于学术研究方面,而机器视觉则侧重于应用方面。 机器人视觉是机器视觉研究的一个重要方向,它的任务是为机器人建立视觉系统,使得机器人能更灵活、更自主地适应所处的环境,以满足诸如航天、军事、工业生产中日益增长的需要(例如,在航天及军事领域对于局部自主性的需要,在柔性生产方式中对于自动定位与装配的需要,在微电子工业中对于显微结构的检测及精密加工的需要等)。机器视觉作为一门工程学科,正如其它工程学科一样,是建立在对基本过程的科学理解之上的。机器视觉系统的设计依赖于具体的问题,必须考虑一系列诸如噪声、照明、遮掩、背景等复杂因素,折中地处理信噪比、分辨率、精度、计算量等关键问题。 1.3机器视觉的研究现状 机器视觉研究出现于60年代初期,电视摄像技术的成熟与计算机技术的发展使得机器视觉研究成为可能。它作为早期人工智能研究的一部分,由于技术条件的限制,进展缓慢。80年代初,在D·Marr提出的计算视觉理论指导下,机器视觉研究得到了迅速发展,成为
[Labview经验]机器视觉系列——Vision 基础知识下集 第1章节(下) rolex cellini replica 在上回我们逐一介绍与机器视觉相关的专有名词与周边光学设备,在本回要开始来说明如何使用LabVIEW来截取相机的影像,并正确的显示在人机介面上﹔另外也针对NI Vision所提供的影像校正模式进行说明,以及如何利用软体方式来设定相机的属性与触发取像模式。 audemars piguet royal oak offshore chrono auto replica 1.2 软体截取与显像 1.2.1 NI MAX影像装置确认 在前面一小节介绍了架设整个影像系统所需要的硬体相关设备,现在要来说明如何在NI MAX找到已安装的相机,并且从相机中取得影像。 当我们打开NI MAX,在「My System--》Devices and Interfaces--》NI-IMAQdx Devices」下,可找寻已安装成功的相机,点选相机后,按下右边画面的上方「Grab」键可进行连续取像,另外红色框选处可以找到一些关于相机的规格与内部参数设定,画面下方有显示影像的基本参数,包括目前影像大小、缩放比例与像素的颜色值,另外下方的tab表单处可以找到一些关于相机的规格与内部参数设定。 replica miu miu tote bags
图1.26- 在NI MAX下进行取像作业 1.2.2 IMAQ影像截取模式 现在要来练习如何使用LabVIEW来取得相机的影像。如果您过去曾经使用LabVIEW来开发NI相关产品,如DAQ设备等,不难发现LabVIEW在相关套件中都会提供两种开发模式:1. 高阶元件(HL); 2. 低阶元件(LL),同样地在IMAQ套件裡也存在这两种开发模式。 高低阶模式并不是将元件区分为高低等级,所谓的高阶元件主要是将资源开启、撷取、关闭全包装成一个Express VI,可以帮助使用者快速地完成取像相关的程式设定,就能直接将影像输出到LabVIEW上;而低阶取像元件将功能切割为数个VI,需由使用者自行设定元件才能完成取像动作,好处在于能够让使用者更有弹性的唿叫参数设定,而另一个优点在于,与高阶元件相比,少了反覆建立与关闭资源的动作,可以有效降低系统资源浪费。 高阶(HL)取像元件使用步骤 安装完LabVIEW的IMAQ套件后,可在Block Diagram(简称BD)下,按下右键跳出Function Template后依序往下搜寻「Function Template --》 Vision and Motion --》 Vision Express --》Vision Acquisition」(图1.27),将「Vision Acquisition」
基于 labVIEW 和 IMAQ 的 LCD 机器视觉精确检测系统 Lxy Lxy, the accurate Machine vision system for LCD modules check, based on labVIEW and IMAQ 作者李春森 职务测试工程师 公司飞利浦移动显示系统公司上海分公司 应用领域:产品测试 挑战:如何应用成熟的技术实现对移动电话的液晶显示点阵实现精确的检测 应用方案应用图像处理的基本方法和飞利浦公司的液晶驱动硬件以及采用NI公司应用程序开发平台labVIEW 和强大的图像处理软件IMAQ实现对移动电话液晶显示屏的机器视觉检测 使用产品labVIEW; IMAQ; PCI-1408 介绍随着通讯事业在中国的蓬勃发展移动电话的使用在中国越来越普遍作为移动电话的核心之一的液晶显示器由于用户的需求正向大屏幕多点及彩色方向发展由于液晶显示的分辨率不断上升对其进行人工检测的难度也越来越大采用机器视觉的液晶显示检测系统 Lxy就成为必然之选 Lxy 系统组成及检测方法 1. 系统组成系统的结构组成如下图11所示 图1 1 Lxy系统组成 本系统采用NI公司的高速图像采集卡PCI1408,该采集卡支持多路图像采集现采用双镜头输入以提高系统的分辨率该系统采用背光照明光度可调图像经由CCD摄影头并经采集卡转换为数字化图像输入计算机经处理后判定是否正常
2. 检测方法本系统的检测方法是采用预先经自学习产生的一系列标准图像与采集的相应图像相减并转换成为二值图的方式在经一系列的处理之后得到检测的结果并判断产品的好坏其流程如图12 所示 图1 2 图像处理流 Lxy 的图像处理及图像分析原理 1. Lxy 系统照明无论进行图像处理还是进行图像分析照明条件都是最重要的外部条件对于机器视觉而言可控并恒定的光源是使检测可靠并突出检测目标的最重要的手段之一对于 LCD 检测尤其如此因为对于LCD 生产公司而言不仅检测系统的检测精度很重要检测的时间也是衡量一个机器视觉检测系统优劣的指标如果照明系统不够均匀稳定势必造成重测率的上升而影响到生产所以如何确定Lxy 系统的照明光源非常重要在Lxy 系统中采用进口FOSTEC 可调式光源20750.2并经光纤将光线引至磨砂灯板 使之作为均匀并可调的背光在实践中取得了很好的效果 2. Lxy 系统采集图像位置调整由于操作人员的摆放每次不同并且由于采用双镜头提高系统的分辨率所以采集图像与标准图像之间必然有位置上的差异进行位置调整的算法就必不可少如图21 所示 图2 1 定位模板图 为定位需要经Philips 的LCD 驱动产生定位用模板图如图21所示在液晶显示矩阵的四角各显示四个定位用方形小块作为将来模板识别pattern match)时用的标准图形模板在每个镜头 的标准图像中在自学习标准图像的时候会自动将工程师定义的每个镜头的左右两个模板
基于LabVIEW的机器视觉实验系统开发 针对精密测控技术与仪器实验室的虚拟仪器实践平台,对其嵌入式测控系统的图像处理功能进行再开发。为虚拟仪器课程设计提供技术支持,开发一套集表现性、可欣赏性、实用性和应用性与一体的视觉平台。针对以上要求,本平台以电子芯片表面为处理对像,以图像处理的手段实现不同芯片的识别功能,平台的实现具体应包括以下几个部分: 1)硬件平台搭建,包括摄像头、CCD、图像采集卡等。 2)软件平台搭建,包括: a)图像处理程序,包括视觉系统基本功能模块的搭建; b)平台交互界面,在Labview环境下调用所采集图像与图像处理的功 能模块,完成对图像的处理等功能。 1系统介绍 图1 机器视觉实验平台流程 该系统主要由图像获取和图像处理平台组成,系统流程如图1所示。 1.1硬件平台的搭建 硬件部分主要包括成像CCD及摄像头、图像采集卡、数据传输线和计算机
等,其实物如图2所示。 图2 机器视觉系统硬件 1.1.1 相机(成像CCD 和摄像头)的选择 本系统是一个视觉系统的演示平台,以电子芯片表面为处理对象,为了应用在更多其它对象上,所以假定视觉范围为100×100mm2,对于芯片表面的字符要求能检测出0.2mm 大小的线条或瑕疵。 根据以上条件,可以将0.2mm 假定为理论像素值。也就是说,只要像素值能达到0.2mm ,就可以满足测量精度方面要求。根据上面计算相机X 方向或Y 方向的分辨率公式为: 100(X/Y 方向视野范围)÷0.2(X/Y 方向理论像素值)=200(X/Y 方向分辨率) 可知,只要相机的分辨率高于200×200,就是适合此系统的相机。通过调查市场现有相机参数,同时考虑到成本,本系统的相机CCD 采用奥尼克斯的MBC-5050,其主要参数为: 成像器件:1/3英寸CCD 信号系统:CCIR 黑白制式
机器视觉算法开发软件----HALCON HALCON是世界范围内广泛使用的机器视觉软件,用户可以利用其开放式结构快速开发图像处理和机器视觉软件。 HALCON提供交互式的编程环境HDevelop。可在Windows,Linux,Unix下使用,使用HDevelop可使用户快速有效的解决图像处理问题。HDevelop含有多个对话框工具,实时交互检查图像的性质,比如灰度直方图,区域特征直方图,放大缩小等,并能用颜色标识动态显示任意特征阈值分割的效果,快速准确的为程序找到合适的参数设置。HDevelop程序提供进程,语法检查,建议参数值设置,可在任意位置开始或结束,动态跟踪所有控制变量和图标变量,以便查看每一步的处理效果。当用户对于机器视觉编程代码完成后,HDevelop可将此部分代码直接转化为C++,C或VB源代码,以方便将其集成到应用系统中。 HALCON提供交互式的模板描述文件生成工具HmatchIt,。可交互式地为一个模型定义一个任意形状的感性趣区域,HmatchIt优化给出此创建模型的合适参数, 自动生成模板描述文件以供程序调用,快速为基于形状匹配和结构匹配的用户找到实现目标识别和匹配应用的合适的参数设置。 HALCON提供支持多CPU处理器的交互式并行编程环境Paralell Develop, 其继承了单处理器板HDevelop的所有特点,在多处理器计算机上会自动将数据比如图像分配给多个线程,每一个线程对应一个处理器,用户无需改动已有的HALCON程序,就立即获得显
著的速度提升。 HALCON中HDevelop Demo中包含680个应用案例,根据不同的工业领域,不同的用法和算法分类列出,用户可以根据自己的需求方便的找到相对应的类似案例,快速掌握其函数用法。 HALCON提供的函数使用说明文档,详细介绍每个函数的功能和参数用法,提供在不用开发语言(VC,VB,.NET等)下的开发手册,而且提供一些算法(例如3D)的原理性介绍,给用户的学习提供帮助。 特点:原型化的开发平台,自动语法检查; 动态察看控制和图标变量; 支持多种操作系统; 支持多CPU; 支持多种文件格式; 自动语言转化功能; 与硬件无关,可支持各种硬件; 应用领域:医学图像分析; 2D/3D测量; 立体视觉; 匹配定位; 光学字符识别; Blob分析;
机器视觉概念/研究现状/应用/检测 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 1、机器视觉 1.1机器视觉的概念 机器视觉被定义为用计算机来模拟人的视觉功能,从客观事物的图像中提取信息,进行处理并加以理解,最终用于实际检测、测量和控制。一个典型的工业机器视觉应用系统包括光源、光学系统、图像采集系统、数字图像处理与智能判断决策模块和机械控制执行模块。系统首先通过CCD相机或其它图像拍摄装置将目标转换成图像信号,然后转变成数字化信号传送给专用的图像处理系统,根据像素分布!亮度和颜色等信息,进行各种运算来抽取目标的特征,根据预设的容许度和其他条件输出判断结果。 值得一提的是,广义的机器视觉的概念与计算机视觉没有多大区别,泛指使用计算机和数字图像处理技术达到对客观事物图像的识别、理解。而工业应用中的机器视觉概念与普通计算机视觉、模式识别、数字图像处理有着明显区别,其特点是: 1、机器视觉是一项综合技术,其中包括数字图像处理技术、机械工程技术、控制技术、电光源照明技术,光学成像技术、传感器技术、模拟与数字视频技术、计算机软硬件技术、人机接口技术等。这些技术在机器视觉中是并列关系。相互协调应用才能构成一个成功的工业机器视觉应用系统。 2、机器视觉更强调实用性,要求能够适应工业生产中恶劣的环境,要有合理的性价比,
要有通用的工业接口,能够由普通工作者来操作,有较高的容错能力和安全性,不会破坏工业产品,必须有较强的通用性和可移植性。 3、对机器视觉工程师来说,不仅要具有研究数学理论和编制计算机软件的能力,更需要光、机、电一体化的综合能力。 4、机器视觉更强调实时性,要求高速度和高精度,因而计算机视觉和数字图像处理中的许多技术目前还难以应用于机器视觉,它们的发展速度远远超过其在工业生产中的实际应用速度。 1.2机器视觉的研究范畴 从应用的层面看,机器视觉研究包括工件的自动检测与识别、产品质量的自动检测、食品的自动分类、智能车的自主导航与辅助驾驶、签字的自动验证、目标跟踪与制导、交通流的监测、关键地域的保安监视等等。从处理过程看,机器视觉分为低层视觉和高层视觉两阶段。低层视觉包括边缘检测、特征提取、图像分割等,高层视觉包括特征匹配、三维建模、形状分析与识别、景物分析与理解等。从方法层面看,有被动视觉与主动视觉之,又有基于特征的方法与基于模型的方法之分。从总体上来看,也称作计算机视觉。可以说,计算机视觉侧重于学术研究方面,而机器视觉则侧重于应用方面。 机器人视觉是机器视觉研究的一个重要方向,它的任务是为机器人建立视觉系统,使得机器人能更灵活、更自主地适应所处的环境,以满足诸如航天、军事、工业生产中日益增长的需要(例如,在航天及军事领域对于局部自主性的需要,在柔性生产方式中对于自动定位与装配的需要,在微电子工业中对于显微结构的检测及精密加工的需要等)。机器视觉作为一门工程学科,正如其它工程学科一样,是建立在对基本过程的科学理解之上的。机器视觉系统的设计依赖于具体的问题,必须考虑一系列诸如噪声、照明、遮掩、背景等复杂因素,折中地处理信噪比、分辨率、精度、计算量等关键问题。
江西省南昌市2015-2016学年度第一学期期末试卷 (江西师大附中使用)高三理科数学分析 一、整体解读 试卷紧扣教材和考试说明,从考生熟悉的基础知识入手,多角度、多层次地考查了学生的数学理性思维能力及对数学本质的理解能力,立足基础,先易后难,难易适中,强调应用,不偏不怪,达到了“考基础、考能力、考素质”的目标。试卷所涉及的知识内容都在考试大纲的范围内,几乎覆盖了高中所学知识的全部重要内容,体现了“重点知识重点考查”的原则。 1.回归教材,注重基础 试卷遵循了考查基础知识为主体的原则,尤其是考试说明中的大部分知识点均有涉及,其中应用题与抗战胜利70周年为背景,把爱国主义教育渗透到试题当中,使学生感受到了数学的育才价值,所有这些题目的设计都回归教材和中学教学实际,操作性强。 2.适当设置题目难度与区分度 选择题第12题和填空题第16题以及解答题的第21题,都是综合性问题,难度较大,学生不仅要有较强的分析问题和解决问题的能力,以及扎实深厚的数学基本功,而且还要掌握必须的数学思想与方法,否则在有限的时间内,很难完成。 3.布局合理,考查全面,着重数学方法和数学思想的考察 在选择题,填空题,解答题和三选一问题中,试卷均对高中数学中的重点内容进行了反复考查。包括函数,三角函数,数列、立体几何、概率统计、解析几何、导数等几大版块问题。这些问题都是以知识为载体,立意于能力,让数学思想方法和数学思维方式贯穿于整个试题的解答过程之中。 二、亮点试题分析 1.【试卷原题】11.已知,,A B C 是单位圆上互不相同的三点,且满足AB AC → → =,则A BA C →→ ?的最小值为( ) A .1 4- B .12- C .34- D .1-
机器视觉技术及其应用概述 姓名: 班级:机械0904班学号: 摘要:近年来,机器视觉已经发展成为光电子的一个应用分支,广泛应用于微 电子、PCB生产、自动驾驶、印刷、科学研究和军事等领域。机器视觉在中国的蓬勃发展,使从事机器视觉的公司和人员大量涌现。首先概述了机器视觉技术的基本原理并分析了机器视觉系统的构建;接着论述了机器视觉技术的当前主要应用领域与情况;最后分析了现阶段机器视觉技术存在的问题。 关键词:器视觉;技术;应用 机器视觉系统组成及其工作原理 机器视觉即用机器代替人眼来做测量和判断。机器视觉系统的工作流程大致为:被摄取目标——经图像摄取装臵——图像信号——经图像处理系统——数字信号——经抽取目标特征——判断结果并控制设备。该流程的实现需相应的硬件作为基础,典型的工业机器视觉系统构成有照明、镜头、相机、图像采集卡、视觉处理器等。下面将对机器视觉系统组成和工作原理进一步具体说明。 机器视觉系统组成 从原理上机器视觉系统主要由三部分组成:图像的采集、图像的处理和分析、输出或显示。—个典型的机器视觉系统应该包括光源、光学系统、图像捕捉系统、图像数字化模块、数字图像处理模块、智能判断决策模块和机械控制执行模块,如图1所示。 从中我们可以看出机器视觉是一项综合技术。其中包括数字图像处理技术、机械工程技术、控制技术、光源照明技术、光学成像技术、传感器技术、模拟与数字视频技术、计算机软硬件技术、人机接口技术等。只有这些技术的相互协调应用才能构成一个完整的机器视觉应用系统。机器视觉应用系统的关键技术主要体现在光源照明、光学镜头、摄像机(CCD)、图像采集卡、图像信号处理以及执行机构等。以下分别就各方面展开论述。
IMAQ 模块介绍
fhinali 编写
IMAQ 模块介绍
一.LabVIEW 机器视觉前面板上的模块有以下几类(如图 1 所示) 1. IMAQ Image.ctl 2.Image Display control 3.IMAQ Vision controls 4.Machine Vision controls
图1 1 IMAQ Vision controls
对图像进行分析和处理所用到的一些控件,包括图像的类型,图像处理的方式和不同的 形态算子以及颜色的类型的选择等等。如图 2
IMAQ 模块介绍
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For EvaluatiofhninOalin编ly写.
图2 1.1 Image Type 用于图片类型的选择,可以选择的类别有 8bits,16bits,Float,Complex,RGB 和 HSL。一 般用在从文件中读取图片时类型的选择。
1.2 ROI Descriptor ROI 区域的描述。ROI 是 Region Of Interesting 的简称,中文应该翻译为目标区域。一般用 在一个大图中取一块特定形状的区域,以便后续的处理和分析。 ROI 为一簇数据,包括一个整数数组和一个簇组成的数组。整数数组内有 4 个元素,为图形 最小外接矩形的四条边的坐标。簇数组中的簇由轮廓类型(整数),ROI 类型(整数)和图 形坐标点(为数组,根据 ROI 类型的不同,数组的定义也不同)
1.3Optional Rectangle 选择的矩形区域,为四个元素的数组,代表矩形的四条边的坐标。
1.4Color Mode 色彩模式,彩色图形的显示和处理模式,包括 RGB,HSL,HSV,HIS 四种。
1.5Threshold Range 阀值范围,为一包含两个数组元素的簇,常用于灰度或色彩图像阀值处理模块中。
1.6 Convolution Kernel 二维浮点数组成的数组,用于构造一些算法的算子。
1.7 Morphology Operation 形态算法的选择。可以选择不同的数据处理方式。
1.8 Structuring Element 结构元素,为二维的整数数组。
基于Labview的图像测量分析系统设计 摘要: 为了能实时检测工件生产状况,把零件疵点缺陷标记出来并进行分类,本文研究了适用于生成零件表面缺陷检测的实时检测系统,论述了其硬件结构和软件流程,提出了一种基于虚拟仪器的快速有效的检测算法,对采集的图像进行实时分析、处理与识别。结果表明,该系统可以有效地检测出零件的疵点和疵点的类别。 关键词:虚拟仪器;表面检测;智能相机;零件缺陷 Abstract:In order to detect the workpiece production situation,put the parts defect defect marking and classification,this paper studies the real-time detection system is suitable for the detection of surface defect parts,discusses its hardware structure and software flow,this paper proposes a fast and effective detection algorithm based on virtual instrument,real-time analysis,the acquisition of the image processing and recognition.The results show that,the system can effectively detect the parts of the defects and defects. Keywords : Labview;Online detect;Grey Cloth Defect
Halcon机器视觉二维码实例及分步注解 [plain]view plaincopy 1.*2D Code generated by Image Acquisition01 2.*QR Code 3.dev_close_window() 4.dev_open_window(0,0,400,400,'black',WindowHandle) 5.*先关闭活动图形窗口,再打开这个窗口,标识符为WindowHandle; 6.*相对于界面左上角第0行、第0列,大小为400×400像素,颜色为黑色。 7.open_framegrabber('DirectShow',1,1,0,0,0,0,'default',8,'rgb',-1,'false','defa ult','Gsou USB2.0Camera',0,-1,AcqHandle) 8.*打开帧接收器(图像采集设备,如摄像头,工业相机等),参数(Parameter)详见这个算子 9.*注意摄像头的名称,可以用工具栏中的“助手”——打开新的Image Acquisition获取摄像头及插入代码 10.grab_image_start(AcqHandle,-1) 11.while(true) 12.grab_image_async(Image,AcqHandle,-1) 13.create_data_code_2d_model('QR Code',[],[],DataCodeHandle) 14.*二维码的创建开头的算子,clear为结束清除的算子,见下。 15.set_display_font(WindowHandle,16,'mono','true','false') 16.dev_set_color('forest green') 17.dev_set_draw('margin') 18.dev_set_line_width(3) 19.set_data_code_2d_param(DataCodeHandle,'default_parameters','enhanced_recognition') 20.*设置选定参数的二维数据模型,参数详见这个算子 21.find_data_code_2d(Image,SymbolXLDs,DataCodeHandle,[],[],ResultHandles,DecodedDa taStrings) 22.*检测和读取二维代码符号,也支持读取二维数据模型的序列,参数详见这个算子 23.for i:=0to|ResultHandles|-1by1 24.select_obj(SymbolXLDs,SymbolXLD,i+1) 25.get_contour_xld(SymbolXLD,Row,Col) 26.get_string_extents(WindowHandle,DecodedDataStrings[i],Ascent,Descent,TxtWidth ,TxtHeight) 27.disp_message(WindowHandle,DecodedDataStrings[i],'image',max(Row-50),max([min( Col+30)-TxtWidth/2,1]),'black','true') 28.endfor 29.*这段for循环语句的目的是让解码到的字符串(二维码的内容)显示到二维码深绿色(forest green上 面定义)的解码区域框的行列位置。 30.*disp_message(WindowHandle,DecodedDataStrings,'window',12,12,'black','true') 31.*如果不需要设置显示到区域框中间的位置,而是显示到窗体的上方或其他位置,那么不需要上面那段for 语句,只需这段信息显示的语句即可显示到窗体相应位置。 32.if(|DecodedDataStrings|>0) 33.disp_continue_message(WindowHandle,'black','true')
跟我学机器视觉-HALCON学习例程中文详解-QQ摄像头读取条码 第一步:插入QQ摄像头,安装好驱动(有的可能免驱动) 第二步:打开HDevelop,点击助手—打开新的Image Acquisition—选中图像获取接口(I),然后点击检测,找到摄像头。如下图: 第三步:点击连接,将颜色空间设置为gray,然后点击实时,此时图像窗口中将显示采集到的图像,将物体放置到摄像头前,位置调至条码清晰。如下图:
集,点击插入代码,此时程序编辑器中将自动生成代码,如下图:
这时单击下运行按钮,将会采集一副图像并显示到图形窗口中。接下来我们将开始条码读取的工作。 第五步:在Do Something后插入如下代码: create_bar_code_model ([ ], [ ], BarCodeHandle) *由于不知道条码是何类型,因此条码类型设置为auto。CodeTypes := ['auto'] find_bar_code (Image, SymbolRegions, BarCodeHandle, CodeTypes, DecodedDataStrings) get_bar_code_result (BarCodeHandle, 'all', 'decoded_types', DecodedDataTypes) 这时再重新运行程序,只要图像清晰,此时就可以读到条码了。条码区域会变成红色,而且在变量窗口中可以查到读取的条码类型和内容。如下图:
第六步:我们再添加代码,将读取结果直接显示在图像窗口中。 disp_message (WindowHandle, DecodedDataTypes[0]+': '+DecodedDataStrings[0], 'image', 100, 160, 'forest green', 'true') 此时会提示错误WindowHandle未被初始化。 *获取更多课程请Q智达工控学院:1613985351 因为图像采集助手会自动打开一个窗口,因此我们先将它关闭,然后自己创建一个窗口。在程序最开始加上这两句代码: dev_close_window () dev_open_window (0, 0, 512, 512, 'black', WindowHandle) 再重新运行程序,此时在读取到的条码在图像中写出来了。如下图:
封面
作者:PanHongliang 仅供个人学习 基于HALCON的机器视觉系统的研究与实现 摘要 近年来,机器视觉系统以其高效率、高可靠、低成本的特点在国外取得了广泛的应用。机器视觉系统适用于众多领域,例如工业自动化、医药业、制造业、农业等,弥补了人类视觉的很多不足。本文采用德国MVTec公司的专业机器视觉软件HALCON来开发机器视觉系统,提出了相关机器视觉实现方法,
并且在机器视觉实验平台上完成了一个弹簧片检测任务。 目前关注较多的是机器视觉系统的硬件部分,而机器视觉软件部分关注较少,一个先进的机器视觉系统除了具有高性能的硬件外,还需要有高性能的软件,虽然说许多常见的开发软件例如Mircosoft的Visual Studio、NI的LabWindows\CVI等等都可以开发机器视觉系统,但是开发周期比较长,针对性较弱,程序的复杂程度较高。而采用HALCON作为机器视觉和图像处理核心软件,不仅大大缩短了开发周期,降低了开发难度,而且可以参考HALCON 提供的众多机器视觉和图像处理例程来针对具体的任务做具体开发。 文章的第一章研究了机器视觉系统的组成、应用现状和发展,并且对机器视觉软件HALCON做了概述。第二章根据相关要求,选择合适的硬件单元,设计和搭建了VS-ZM1200机器视觉实验平台。第三章研究了机器视觉中常用的一些图像处理技术,重点讨论了在弹簧片检测任务中所采用的图像处理技术和算法,如图像的增强,分割,边缘检测等。第四章研究了机器视觉软件,重点研究了HALCON,并且对在Visual C++开发环境下如何使用HALCON编写的程序做了讨论。第五章介绍了在VS-ZM1200机器视觉实验平台上,使用HALCON和Visual C++开发的一套弹簧片检测系统,该系统完成关于弹簧片的尺寸参数测量和外观参数判别的任务。 第一章:绪论 1.1机器视觉概述 人类在征服自然、改造自然和推动社会进步的过程中,为了克服自身能力、能量的局限性,发明和创造了许多机器来辅助或代替人类完成任务。这类机器,我们通常称为智能机器,它能模拟人类的功能,能感知外部世界并有效地解决人所希望解决的问题。人类感知外部世界主要是通过视觉、触觉、听觉和嗅觉等感觉器官,而视觉,是人类最重要的感觉功能。视,就是看。觉,就是感觉、感知。通过看来感知外部世界丰富多采的信息。“百闻不如一见”,这句话生动地说明了视觉对获得客观世界信息的重要性。据统计,人所感知的外界信息有80%以上是由视觉得到的[1],通过视觉,我们可以感受到物体的位置,亮度以及物体之间的相互关系等。因此,对于智能机器来说,赋予机器人类的视觉功能对发展智能机器是极其重要的,由此形成了 一门新的学科———机器视觉。 机器视觉,就是用机器(通常是数字计算机)代替人眼来做测量及判断,对图像进行自动处理并报告“图像中有什么”的过程。美国制造工程师协会(SME Society of Manufacturing Engineers)机器视觉分会和美国机器人工业协会(RIA Robotic Industries Association)的自动化视觉分会对机器视觉下的定义为:“机器视觉是通过光学的装置和非接触的传感器自动地接收和处理一个真实物体的图像,以获得所需信息或用于控制机器人运动的装置”。具体来讲,是指通过镜头将被测目标转化为图像信号,投射至影像接受器件(一般为 CCD 元件)上再通过数字计算机进行分析处理。CCD是英文(Charge Coupling Device)的缩写,其中文含义为电荷耦合组件。当不同强度的光线照射在CCD表面,CCD