电气工程及其自动化专业方向课程设计
一、设计任务
1、了解并熟悉双闭环三相异步电机调压调速原理及组成。
2、学习 SIMULINK,熟悉相关的模块功能。
3、进一步理解交流调压系统中电流环和转速环的作用。
二、设计要求
1、利用SIMULINK建立闭环调速系统仿真模型。
2、调试完成调压模块仿真、开环系统仿真、闭环系统仿真。
三、实验设备
1、计算机一台
2、MATLAB仿真软件
四、实验原理
调压调速即通过调节通入异步电动机的三相交流电压大小来调节转子转速的方法。理论依据来自异步电动机的机械特性方程式:
其中,p为电机的极对数;
w1为定子电源角速度;
U1为定子电源相电压;
R2’为折算到定子侧的每相转子电阻;
R1为每相定子电阻;
L11为每相定子漏感;
L12为折算到定子侧的每相转子漏感;
S为转差率。
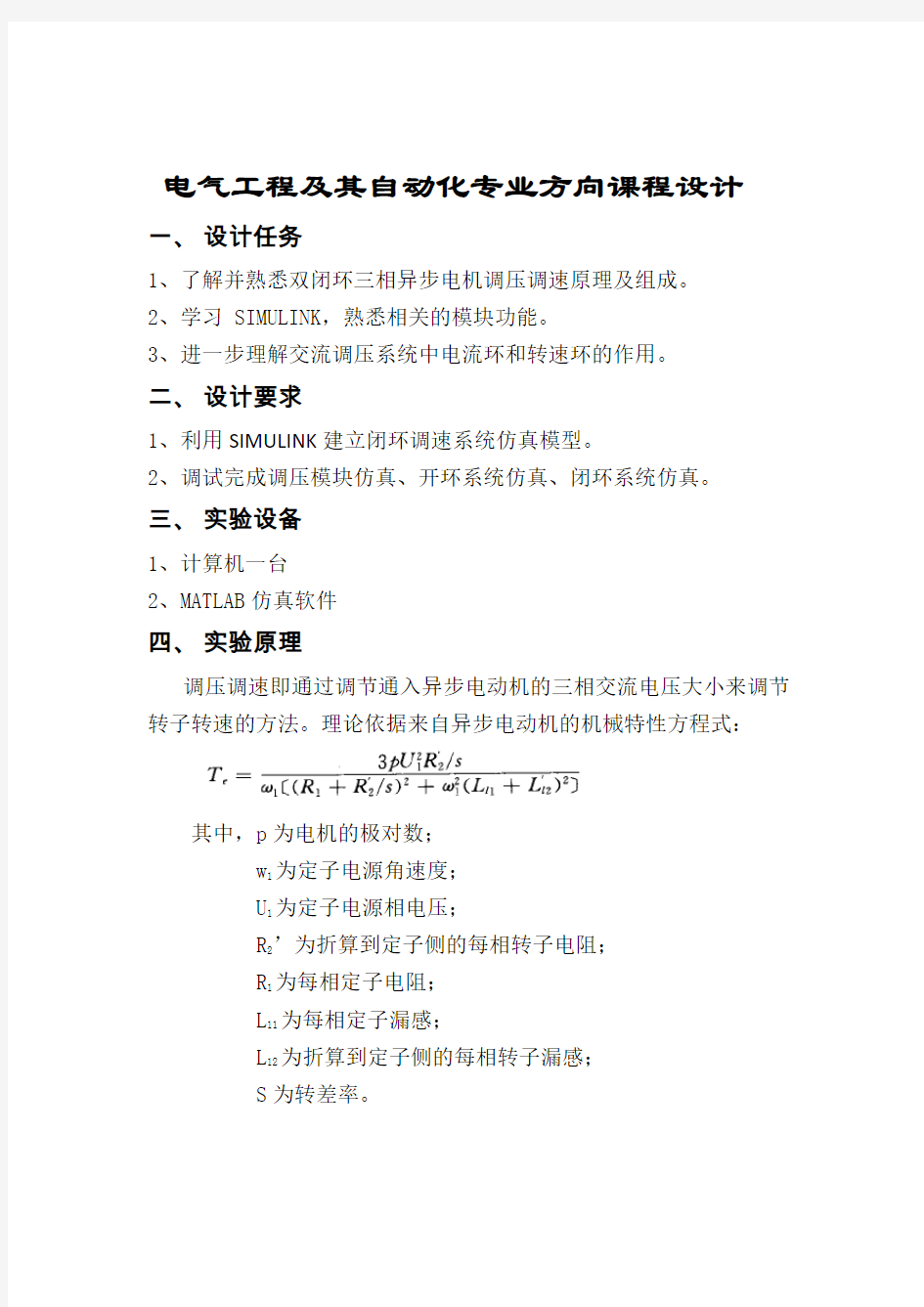
图1 异步电动机在不同电压的机械特性
由电机原理可知,当转差率s 基本保持不变时,电动机的电磁转矩与定子电压的平方成正比。因此,改变定子电压就可以得到不同的人为机械特性,从而达到调节电动机转速的目的。
1、调压电路
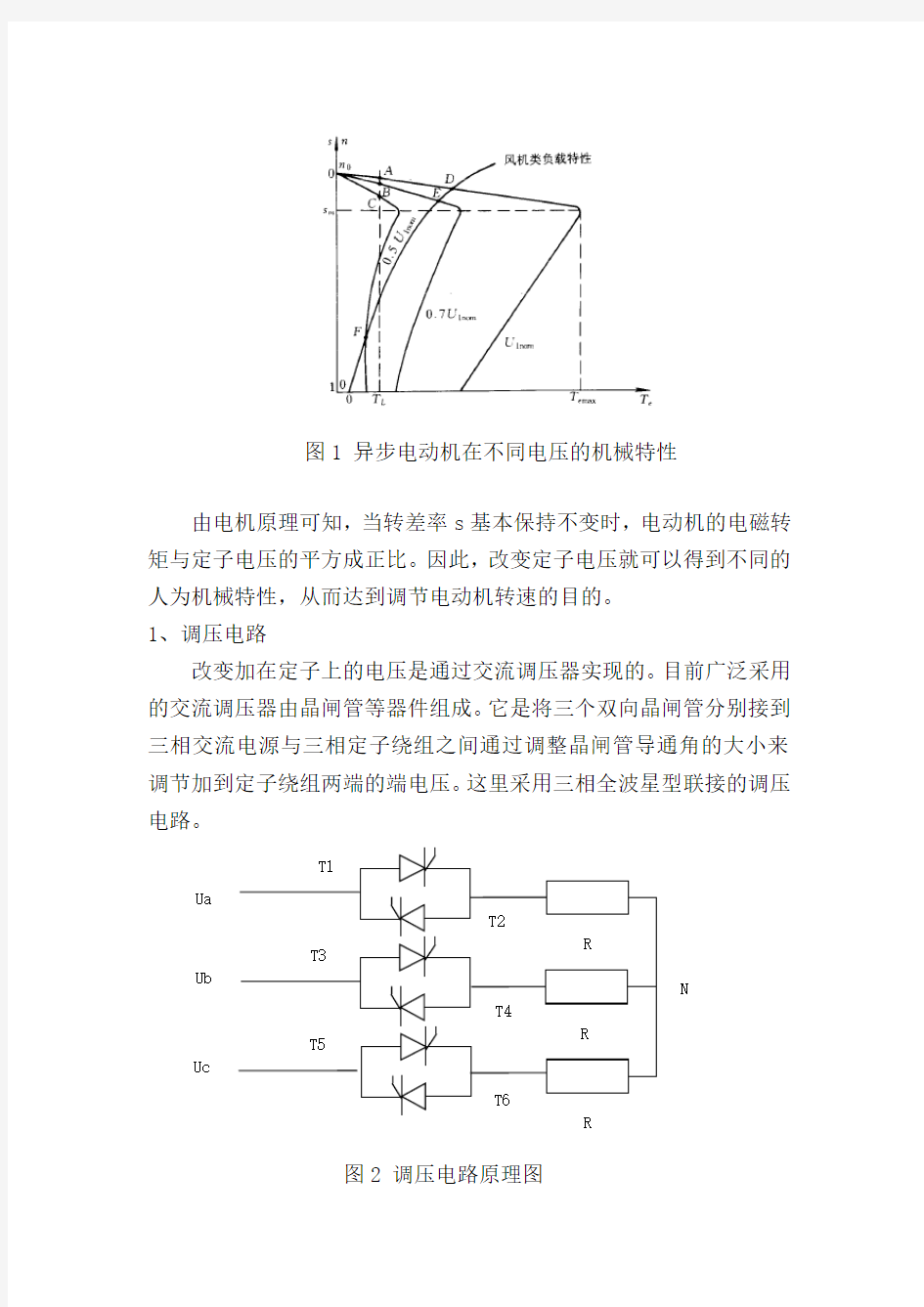
改变加在定子上的电压是通过交流调压器实现的。目前广泛采用的交流调压器由晶闸管等器件组成。它是将三个双向晶闸管分别接到三相交流电源与三相定子绕组之间通过调整晶闸管导通角的大小来调节加到定子绕组两端的端电压。这里采用三相全波星型联接的调压电路。
图2 调压电路原理图 Ua Ub
Uc T2
T3
T5
T4
T6
R R R
N T1
2、开环调压调速
开环系统的主电路由触发电路、调压电路、电机组成。原理图如下:
图3 开环调压系统原理图
AT为触发装置,用于调节控制角的大小来控制晶闸管的导通角,控制晶闸管输出电压来调节加在定子绕组上的电压大小。
3、闭环调压调速
速度负反馈闭环调压调速系统的工作原理:将速度给定值与速度反馈值进行比较,比较后经速度调节器得到控制电压,再将此控制电压输入到触发装置,由触发装置输出来控制晶闸管的导通角,以控制晶闸管输出电压的高低,从而调节了加在定子绕组上的电压的大小。因此,改变了速度给定值就改变了电动机的转速。由于采用了速度负反馈从而实现了平稳、平滑的无级调速。同时当负载发生变化时,通过速度负反馈,能自动调整加在电动机定子绕组上的电压大小。由速度调节器输出的控制电压使晶闸管触发脉冲前移,使调压器的输出电
压提高,导致电动机的输出转矩增大,从而使速度回升,接近给定值。
图4 闭环调速结构图
图5 闭环调速系统原理图
五、 仿真内容
1、调压电路
1)、调压电器的仿真模型
调节器晶闸管调压装置异步电动机转速反馈装置
给定
n
U n U +-ct U 1U n 图5-9 调压调速系统静态结构框图
图6 (a)利用单个晶闸管元器件搭建的三相交流调压器的仿真模型(b)图的封装模型2)、调压电路的搭建
图7 调压电路模型
3)、参数的设定
Frequency of synchronization voltages(hz):同步电压频率(赫兹)50Hz
Pulse width(degrees):触发脉冲宽度(角度)10
Double pulsing:双脉冲出发选择。
RLC负载的参数设定:电阻100Ω,电感0H,电容的值为inf
UA:峰值220v,f为50Hz,初相位为0°
UB:峰值220v,f为50Hz,初相位为-120°
UC:峰值220v,f为50Hz,初相位为-240°
4)电阻负载的仿真图形
a) 触发角α为45° b)触发角α为60°
图8 三相交流调压器的输出电压波形
在电阻负载时三相交流调压器的输出电压仿真结果如图8所示。其中图8a为α=45°时调压器输出的波形,图8b所示为α=60°时调压器输出的波形。通过比较a)和b)可以发现,随着触发角的增加,同时有三个晶闸管导通的区间逐步减小,到α>=60°时,任何晶闸管都只有两相晶闸管导通。
2、异步电动机带风机泵类负载开环调压调速模块1)参数设定
由公式Tz=kn2可推出k=Tz/n2
电机参数额电压220v 频率为60Hz 极对数为2对容量为2238VA 同步转速为1800转/分钟
可以计算k=0.000003665
UA:峰值180v,f为60Hz,初相位为0°
UB:峰值180v,f为60Hz,初相位为-120°
UC:峰值180v,f为60Hz,初相位为-240°
图9 开环系统仿真模型
1)触发角α为60°时得到的转速
图10 α=60°时电机转速变化的过程
由图中可以观察到当触发角为60°时,转速稳定在1712转/分钟,转速在0.9s时达到稳定状态。
2)触发角α为75°时得到的转速
图11 α=75°时电机转速变化的过程
由图中可以观察到当触发角为75°时,转速稳定在1660转/分钟,转速在1.6s时达到稳定状态。
分析:
通过比较图10和图11的触发角α为60°和80°时可以发现:随着α的增大,使得输出电压降低,使转速下降,从而达到调速的目的。
3)改变电源电压,电源电压为150v, 触发角α为60°时得到的转速
图12 电源电压为150v α=60°时电机转速变化的过程
由图中可以观察到当触发角为60°时,转速稳定在1660转/分钟,转速在1s时达到稳定状态。
分析:
通过比较图11和图13可以发现,在相同的触发角不同的电
源电压下,电源电压的降低会使转速下降。同时也可以得到通过改变电源电压的大小来实现调速的可行性。
3、闭环调压
图13 闭环调压调速系统仿真模型
异步电动机速度负反馈闭环调压调速系统的仿真模型如下所示,将速度给定值(1200)与速度反馈值进行比较,比较后经速度调节器得到控制电压,再将此控制电压输入到触发装置,由触发装置输出来控制晶闸管的导通角,以控制晶闸管输出电压的高低,从而调节了加在定子绕组上电压的大小。因此,改变速度给定值就改变了电机的转速。由于采用了速度负反馈从而实现了平稳平滑的无级调速。同时负载发生变化时,通过速度负反馈,能制动调整加在定子绕组上的电压的大小,由速度调节器输出的控制电压使晶闸管触发脉冲迁移,是调压器的输出电压提高,导致电动机的输出转矩增大,从而使速度回升,接近给定值。
PI设置:比例环4,环0.1,输出限幅[60,-60]。
控制角调节范围0~120.
图14 闭环转速特性
图14是电压为180v,转速给定为1420,从图中可以可以发现转速给定为1420,转速在0.5s时达到稳定状态,转速维持在1420,从中可以得出转速跟随给定变化。
以下是给定1350在1.4S时给60阶跃的转速、控制角、负载转矩。
图14 转速
从图15可以发现转速在0.45s时达到稳定,在0.45s到1.4s时转速
稳定在1350转/分钟,到1.4s时给了一个终值为60的阶跃,可以发现转速跟随给定变化
图15 控制角
从图16可以直观的看到控制角在随着给定的变化而变化,从而实现调速。
图17 转矩
开始时,转速为0,负载转矩为0,反馈因输出限幅为-60,经60偏置使得输入控制角为0,定子绕组电压为电源电压。随着转速的上升,负载转矩增大,反馈在一定范围内依旧为0.经0.6秒后转速稳定在1350,负载转矩、控制角也保持稳定。再过0.8秒,给定增加60,经反馈,减小控制角,增大电压提高转速,负载转矩随之增大,在1.6秒内保持稳定。
六、总结体会
为期两周的专业方向综合性设计实验终于告一段落了,在为期两周的课程设计中,我学到很多东西,有些表面上看起来比较简单的东西,实际做起来的就不像那么简单了,要考虑诸多参数的配合。对于整个系统,因为课题要求是调压调速,所以首先从调压器开始设计,使用利用单个晶闸管元器件搭建的三相交流调压器的仿真模型,再将该模块进行封装。先观察带电阻负载时,调压器输出的波形,通过修改参数终于使得调压器输出的波形与理论相同。接着,异步电动机带风机泵类负载开环调压调速。然后,确定调速系统采用闭环控制,整个系统可以实现转速负反馈调节,使系统的性能大大提高。通过此次设计让我对matlab的simulink模块有了更深的了解,对调压调速的特性也有了更深层次的认识。
七、参考文献
1)机械工业出版社《电力电子和电力拖动控制系统的matlab仿真》洪乃刚
2)机械工业出版社《电力电子技术》王兆安
3)电子工业出版社《matlab电机仿真精华50例》郝世勇
直流调速系统的MATLAB 仿真 一、开环直流速系统的仿真 开环直流调速系统的电气原理如图1所示。直流电动机的电枢由三相晶闸管整流电路经平波电抗器L 供电,通过改变触发器移相控制信号c U 调节晶闸管的控制角α,从而改变整流器的输出电压,实现直流电动机的调速。该系统的仿真模型如图2所示。 图1 开环直流调速系统电气原理图 图2 直流开环调速系统的仿真模型 为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s 0L =,直流电动机励磁由直流电源直接供电。触发器(6-Pulse )的控制角(alpha_deg )由移相控制信号c U 决定,移相特性的数学表达式为 min c cmax 9090U U αα?-=?-
在本模型中取min 30α=?,cmax 10V U =,所以c 906U α=-。在直流电动机的负载转矩输入端L T 用Step 模块设定加载时刻和加载转矩。 仿真算例1 已知一台四极直流电动机额定参数为N 220V U =,N 136A I =, N 1460r /min n =,a 0.2R =Ω,2222.5N m GD =?。励磁电压f 220V U =,励磁电流f 1.5A I =。采用三相桥式整流电路,设整流器内阻rec 0.3R =Ω。平波电抗器 d 20mH L =。仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动和起动后加额定负载时的电机转速n 、电磁转矩 e T 、电枢电流d i 及电枢电压d u 的变化情况。N 220V U = 仿真步骤: 1)绘制系统的仿真模型(图2)。 2)设置模块参数(表1) ① 供电电源电压 N rec N 2min 2200.3136 130(V)2.34cos 2.34cos30U R I U α++?= =≈?? ② 电动机参数 励磁电阻: f f f 220146.7()1.5 U R I = ==Ω 励磁电感在恒定磁场控制时可取“0”。 电枢电阻: a 0.2R =Ω 电枢电感由下式估算: N a N N 0.422019.1 19.10.0021(H)2221460136 CU L pn I ?==?≈??? 电枢绕组和励磁绕组间的互感af L : N a N e N 2200.2136 0.132(V min/r)1460 U R I K n --?= =≈?
仿真设计报告
转速、电流双闭环直流调速系统的Simulink仿真设计 一、系统设计目的 直流调速系统具有调速范围广、精度高、动态性能好和易于控制等优点,所以在电气传动中获得了广泛应用。根据直流电动机的工作原理建立了双闭环直流调速系统的数学模型,并详细分析了系统的原理及其静态和动态性能。按照自动控制原理,对双闭环调速系统的设计参数进行分析和计算,利用Simulink对系统进行了各种参数给定下的仿真,通过仿真获得了参数整定的依据。在理论分析和仿真研究的基础上,设计了一套实验用双闭环直流调速系统。对系统的性能指标进行了实验测试,表明所设计的双闭环调速系统运行稳定可靠,具有较好的静态和动态性能,达到了设计要求。采用MATLAB 软件中的控制工具箱对直流电动机双闭环调速系统进行计算机辅助设计,并用SIMULINK进行动态数字仿真,同时查看仿真波形,以此验证设计的调速系统是否可行。 二、系统理论分析 2.1双闭环直流调速系统工作原理 电动机在启动阶段,电动机的实际转速低于给定值,速度调节器的输入端偏差信号,经放大后输出的电压保持为限幅值,速度调节器工作在开环状态,速度调节器的输出电压作为电流给定值送入电流调节器,此时以最大电流给定值使电流调节器输出移相信号直流电压迅速上升,电流也随即增大直到最大给定值,电动机以最大电流恒流加速启动。电动机的最大电流可通过整定速度调节器的输出限幅值来改变。在转速上升到给定转速后,速度调节器输入端的偏差信号减小到近于零,速度调节器和电流调节器退出饱和状态,闭环调节开始起作用。对负载引起的转速波动,速度调节器输入端偏差信号将随时通过速度调节器、电流调节器修正触发器的移相电压,使整流桥输出的直流电压相应变化校正和补偿电动机的转速偏差。另外电流调节器的小时间常数,还能对因电网波动引起的电枢电流的变化进行快速调节,可在电动机转速还未来得及发生改变时,迅速使电流恢
中国石油大学胜利学院综合课程设计总结报告 题目:三相异步电机直接启动特性实验模型 学生姓名:潘伟鹏 系别:机械与电气工程系 专业年级: 2012级电气工程专业专升本2班 指导教师:王铭
2013年 6 月 27日
一、设计任务与要求 普通异步电动机直接起动电流达到额定电流的6--7倍,起动转矩能达到额定转矩的1.25倍以上。过高的温度、过快的加热速度、过大的温度梯度和电磁力,产生了极大的破坏力,缩短了定子线圈和转子铜条的使用寿命。但在电网条件和工艺条件允许的情况下,异步电动机也可以直接启动。本次课程设计通过MATLAB软件建模模拟三相异步电动机直接启动时的各个元器件上的电量变化。 参考: 电力系统matlab仿真类书籍 电机类教材 二、方案设计与论证 三相异步电动机直接起动就是利用开关或接触器将电动机的定子绕组直接接到具有额定电压的电网上。 由《电机学》知三相异步电动机的电磁转矩M与直流电动机的电磁转矩有相似的表达形式。它们都与电机结构(表现为转矩常数)和每级下磁通有关,只不过在三相异步电动机中不再是通过电枢的全部电流,而是点数电流的有功分量。三相异步电机电磁转矩的表达式为: (1-1)式中——转矩常数 ——每级下磁通 ——转子功率因数 式(1-1)表明,转子通入电流后,与气隙磁场相互作用产生电磁力,因此,反映了电机中电流、磁场和作用力之间符合左手定则的物理关系,故称为机械特性的物理表达式。该表达式在分析电磁转矩与磁通、电流之间的关系时非常方便。 从三相异步电动机的转子等值电路可知, (1-2) (1-3)将式(1-2)、(1-3)代入(1-1)得:
东北大学秦皇岛分校控制工程学院自动控制系统课程设计 设计题目:直流电动机开环调速系统 设计与仿真 专业名称自动化 班级学号 学生姓名 指导教师 设计时间2015.7.13~2014.7.24 成绩
目录 1.设计任务书 (3) 2.概述 (4) 2.1前言 (4) 2.2 系统原理 (4) 2.3 simulink框图 (5) 3.元件参数设置 (7) 3.1三相交流电压源设置 (7) 3.2.同步六脉冲触发器 (7) 3.3.三相全控桥整流电路 (8) 3.4.直流电动机设计 (8) 4.仿真结果分析 (9) α=时 (12) 4.2 当30o α=时 (14) 4.3 当60o α=时 (17) 4.4 当90o 4.5励磁电流 (19) 5.结论 (20) 6.参考文献 (22) 7.结束语 (22)
东北大学秦皇岛分校控制工程学院 《自动控制系统》课程设计任务书 专业自动化班级姓名 设计题目:直流电动机开环调速系统设计与仿真 一、设计实验条件 地点:实验室 实验设备:PC机 二、设计任务 直流电动机的额定数据为220V,136A,1460r/min,4极, R=0.21 , a 22 GD=22.5N m;励磁电压为220V,励磁电流为1.5A。采用三相桥式全控整流电路。平波电抗器 L=200mH。 p 设计要求:设计并仿真该晶闸管-电动机(V-M)开环调速系统。观察电动机在全压起动和起动后加额定负载时电动机的转速、转矩和电流变化。 三、设计说明书的内容 1、设计题目与设计任务(设计任务书) 2、前言(绪论)(设计的目的、意义等) 3、主体设计部分 4、参考文献 5、结束语 四、设计时间与设计时间安排 1、设计时间:7月13日~7月24日 2、设计时间安排: 熟悉课题、收集资料:3天(7月13日~7月15日) 具体设计(含上机实验):6天(7月16日~7月21日) 编写课程设计说明书:2天(7月22日~7月23日) 答辩:1天(7月24日)
XXXX届毕业设计说明书 直流电机模糊控制系统 的MATLAB/Simulink仿真研究 院、部:电气与信息工程学院 学生姓名:XXX 指导教师:XXXX职称教授 职称 专业:XXXXXXXXXXXXX 班级:XXXXXXXXX 完成时间:20XX.X.X
摘要 在当今控制技术的发展当中,模糊控制技术的发展走在了前列,成为了当今世界上最先进的控制技术之一。模糊控制技术很好的将模糊数学理论应用于控制领域当中, 更加真切地模拟出了人脑的思维方式和判断能力, 以及对产品生产的过程进行筛选和对产品质量上的控制, 从而发展出了基于模糊控制技术的智能化的新技术,为当今控制技术的发展提供了广阔空间。 在本文当中,主要介绍了基于模糊控制理论的直流电机模糊控制系统的原理,以及直流电机模糊控制系统的优点和缺点,并通过使用MATLAB语言中SIMULINK 模块和模糊控制工具箱对直流电机模糊控制系统进行仿真,把控制直流电机调速的实际情况转换成模糊控制规则,再使用这些规则,对过程经过模糊推理和模糊决策所得到的控制量,从而实现在MATLAB语言中SIMULINK模块和模糊控制工具箱对直流电机模糊控制系统的建模与仿真。对仿真结果予以分析,对直流电机模糊控制系统的仿真进行总结。 关键词:MATLAB;SIMULINK;模糊控制;直流电机;电机调速
ABSTRACT Among today’s control technology development, one of the leading enterprises in the development of fuzzy control technology, fuzzy control technology has become one of the most advanced control technology in the world today, it will be a very good fuzzy control technology of fuzzy mathematics theory is applied in control field, the more realistically simulate the human brain’s way of thinking and judgment ability, as well as to the production process of screening and the control on the quality of product, which was developed based on fuzzy intelligent control technology of the new technology, for the development of modern control technology provides a broad expansion of space. in this article, mainly introduced the dc motor based on fuzzy control theory, the principle of fuzzy control system, as well as the advantages and disadvantages of the fuzzy control system for dc motor, and by using the SIMULINK module and the fuzzy control toolbox in MATLAB language for the calculation of the fuzzy control system of dc motor, the control of the actual situation of the dc motor speed control is converted into fuzzy control rules, and then use these rules, the process through fuzzy reasoning and fuzzy decision of control, thus to achieve the SIMULINK module and the fuzzy control toolbox in MATLAB language modeling and simulation of fuzzy control system of a dc motor. And the analysis to the results of simulation and simulation of fuzzy control system of dc motor. Keywordsmatlab;Simulink;fuzzy control;dc motor;motor speed control
直流调速系统的MA TLAB仿真 一、开环直流速系统的仿真 开环直流调速系统的电气原理如图1所示。直流电动机的电枢由三相晶闸管整流电路经平波电抗器供电,通过改变触发器移相控制信号调节晶闸管的U L c ,从 而改变整流器的输出电压,实现直流电动机的调速。该系统的仿真控制角模型如图2所示。 L + + GT UCR E d- - 开环直流调速系统电气原理图图1 图2 直流开环调速系统的仿真模型
L?0,直为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s流电动机励磁由直流电源直接供电。触发器(6-Pulse)的控制角(alpha_deg)由U 决定,移相特性的数学表达式为移相控制信号c???90?min U?90??c U cmax 1 ??。在直流电动机的负载,所以,在本模型中取U?10V6??30?90U?ccmaxmin转矩输 入端用Step模块设定加载时刻和加载转矩。T L仿真算例1已知一台四极直流电动机额定参数为,,136AIU?220V?NN22。励磁电压,励磁电,, 220VminUR?0.2??1460rn?/m?22.5NGD?fNa流。采用三相桥式整流电路,设整流器内阻。平波电抗器??1.5A0.3RI?recf。仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动20mHL?d n、电磁转矩、电枢电流和起动后加额定负载时的电机转速及电枢电压的uTi ded变化情况。220V?U N仿真步骤: 1)绘制系统的仿真模型(图2)。 2)设置模块参数(表1) ①供电电源电压 U?RI220?0.3?136NNrec130(V)U??? 2?2.34?cos302.34cos?min②电动机参数 励磁电阻: U220f)146.7(?R???f I1.5f励磁电感在恒定磁场控制时可取“0”。 电枢电阻: ?0.2R?a电枢电感由下式估算: CU0.4?220N?19.1?L?19.1?0.0021(H) a2pnI2?2?1460?136NN L:电枢绕组和励磁绕组间的互感 af U?RI220?0.2?136NNa?K?0.132(V?min/r)?e n1460N 2 6060K??0.132?K?1.26eTπ2π2K1.26T0.84(H)??L?af1.5I f电机转动惯量 222.5GD2 )??0.57(kg?mJ?9.814?4g 额定负载转矩③ 模块参数名参数
比例积分控制的单闭环直流调速系统仿真 一、实验目的 1.熟练使用MATLAB 下的SIMULINK 仿真软件。 2.通过改变比例系数K P 以及积分时间常数τ的值来研究K P 和τ对比例积分控制的直流调速系统的影响。 二、实验内容 1.调节器的工程设计 2.仿真模型建立 3.系统仿真分析 三、实验要求 建立仿真模型,对参数进行调整,从示波器观察仿真曲线,对比分析参数变化对系统稳定性,快速性等的影响。 四、实验原理 图4-1 带转速反馈的闭环直流调速系统原理图 调速范围和静差率是一对互相制约的性能指标,如果既要提高调速范围,又要降低静差率,唯一的方法采用反馈控制技术,构成转速闭环的控制系统。转速闭环控制可以减小转速降落,降低静差率,扩大调速范围。在直流调速系统中,将转速作为反馈量引进系统,与给定量进行比较,用比较后的偏差值进行系统控
制,可以有效的抑制甚至消除扰动造成的影响。 当t=0时突加输入U in时,由于比例部分的作用,输出量立即响应,突跳到U ex(t)=K P U in,实现了快速响应;随后U ex(t)按积分规律增长,U ex(t)=K P U in+ (t/τ)U in。在t=t1时,输入突降为0,U in=0,U ex(t)=(t1/τ)U in,使电力电子变换器的稳态输出电压足以克服负载电流压降,实现稳态转速无静差。 五、实验各环节的参数及K P和1/τ的参数的确定 5.1各环节的参数: 直流电动机:额定电压U N=220V,额定电流I dN=55A,额定转速n N=1000r/min,电动机电动势系数C e=0.192V ? min/r。 假定晶闸管整流装置输出电流可逆,装置的放大系数K s=44,滞后时间常数T s=0.00167s。 电枢回路总电阻R=1.0Ω,电枢回路电磁时间常数T l=0.00167s电力拖动系统机电时间常数T m=0.075s。 转速反馈系数α=0.01V ? min/r。 对应额定转速时的给定电压U n?=10V。 稳态性能指标D=20,s 5% 。 5.2 K P和1/τ的参数的确定: PI调节器的传递函数为 W PI(s)=K Pτs+1 τs =K P τ1s+1 τ1s 其中,τ1=K Pτ。 (1)确定时间常数 1)整流装置滞后时间常数T s=0.00167s;
1 绪论 直流电动机具有良好的起、制动性能,宜于在广泛范围内平滑调速,在轧钢机、矿井卷扬机、挖掘机、海洋钻机、金属切割机床、造纸机、高层电梯等需要高性能可控电力拖动的领域中得到了广泛的应用。近年来直流调速系统发展很快,然而直流拖动控制系统毕竟在理论上和实践上都比较成熟,而且从反馈闭环控制的角度来看,它又是交流拖动控制系统的基础,所以首先应该很好的掌握直流系统。我们可以首先从单闭环转速负反馈直流调速系统来研究。由于系统需要观察较多的性能,计算参数较多,而MATLAB中的Simulink实用工具可直接构建其动态模型,省去大量的计算,通过修改动态模型可完善系统性能。 直流调速系统概述 从生产机械要求控制的物理量来看,电力传动自动控制系统有调速系统、位置伺服系统、张力控制系统等其他多种类型,各种系统往往是通过控制转速来实现的,因此调速系统是最基本的驱动控制系统。调速系统目前分为交流和直流调速控制系统,由于直流调速系统的调速范围广,静差率小、稳定性好并且具有良好的动态性能。因此在相当长的时期内,高性能的调速系统几乎都采用了直流调速系统。相比于交流调速系统,直流调速系统在理论上和实践上更加成熟。 直流调速是现代电力拖动自动控制系统中发展较早的自动控制系统。在20世纪60年代发展起来的电力电子技术,使电能可以转换和控制,产生了现代各种高效、节能的新型电源和交直流调速装置,为工业生产,交通运输,建筑、办公、家庭自动化控制设备提供了现代化的高新技术,提高了生产效率和人们的生活质量,因此,人类社会的生产、生活发生了巨大变化。随着新型电力电子器件的研究和开发,先进控制技术的发展,电力电子和电力传动控制装置的性能也不断优化和提高,这一变化的影响将越来越大。 单闭环直流电机调速系统在现代日常生活中的应用越来越广泛,其良好的调速性能、低廉的价格越来越被大众接受。 单闭环直流调速系统由整流变压器、平波电抗器、晶闸管整流调速装置、电动机-发电机、闭环控制系统组成。我们可以通过调节晶闸管的控制角来调节转速,非常方便,高效。
实验四 直流调速系统仿真与设计 一、 实验目的 1、掌握连续部分的程序实现方法; 2、熟悉仿真程序的编写方法。 二、 实验内容 一转速、电流双闭环控制的H 型双极式PWM 直流调速系统,已知电动机参数为:N P =200W ,N U =48V ,N I =4A ,额定转速 500r/min ,电枢电阻Ra=6.5欧,电枢回路总电阻R=8欧,允许电流过载倍数2λ=,电势系数C 0.12min/e V r =?,电磁时间常数s T l 015.0=,机电时间常数s T m 2.0=,电流反馈滤波时间常数 s T oi 001.0=,转速反馈滤波时间常数s T on 005.0=。设调节器输入输出电压 ** nm im cm U U U 10V ===,调节器输入电阻Ω=k R 400。已计算出电力晶体管D202 的开关频率f 1kHz =,PWM 环节的放大倍数s K 4.8=。 试对该系统进行动态参数设计,设计指标:稳态无静差,电流超调量i 5%σ≤;空载起动到额定转速时的转速超调量n 20%σ≤;过渡过程时间s t 0.1s ≤。 建立系统的仿真模型,并进行仿真验证。 一、 设计计算 1. 稳态参数计算 根据两调节器都选用PI 调节器的结构,稳态时电流和转速偏差均应为零;两调节器的输出限幅值均选择为12V 电流反馈系数;A V A V I U im /25.14210nom *=?==λβ 转速反馈系数:r V r V n U nm min/02.0min /50010max *?===α 2. 电流环设计 (1)确定时间常数 电流滤波时间常数T oi =0.2ms ,按电流环小时间常数环节的近似处理方法,则 s T T T oi s i 0003.00002.00001.0=+=+=∑ (2)选择电流调节器结构 电流环可按典型Ⅰ型系统进行设计。电流调节器选用PI 调节器,其传递函数为 s s K s W i i i ACR ττ1 )(+=
%电机设计程序 clear all format short e m1=3;p=2;f=50 %1.额定功率 PN=*10^3 ; %2.额定电压(单位V,三角形接法) UN=380;UN0=380; %3.功电流(单位A) IKW=PN/(m1*UN0) %4.效率eta按照技术条件的规定eta= eta= ; %5.功率因数cos(phi) =,按照技术条件的规定cos(phi)= phi=acos; cos(phi); %6.极对数p=2 p=2; %7.定转子槽数:每极每相槽数取整数。参考类似规格电机取q1=3,则Z1=2m1pq1,再查表10-8选Z2=32,并采用转子斜槽。 q1=3; Z1=2*m1*p*q1 Z2=32 ; %8.定转子每极槽数 Zp1=Z1/(2*p) Zp2=Z2/(2*p) %9.确定电机的主要尺寸;一般可参考类似电机的主要尺寸来确定Di1和lef.现按10-2中的 KE1=*log(PN/1000)*p+ P1=KE1*PN/(eta*cos(phi)) alphap1=;KNm1=;Kdp1=;A1=25000; Bdelta1=;n1=1450; V=(alphap1*KNm1*Kdp1))*(1/(A1*Bdelta1 ))*(P1/n1) D1=; %铁心的有效长度 Di1=; lef =V/((Di1)^2) %气隙的确定 %参考类似产品或由经验公式(10-10a),得 lt=;
delta = lef=lt + 2*delta D2=Di1-2*delta %转子内径先按转轴直径决定(以后再校验转子轭部磁密) Di2= ; %11.极距 tau tau =pi*Di1/(2*p) %12.定子齿距t1 t1=(pi*Di1/Z1) %转子齿距t2 t2=(pi*D2/Z2) bsk=; %15.设计定子绕组 Nphi11=eta*cos(phi)*pi*Di1*A1/(m1*IKW) %取并联支路a1=1,由式(10-15),可得每槽导体数 a1=1; Ns1=47 %16.每相串联导体数Nphi1 Nphi1=Ns1*Z1/(m1*a1) %每相串联匝数N1 N1=Nphi1/2 %17.绕组线规设计 %初选定子电密J11=5.0A/mm^2,由式(10-16),计算导线并绕根数和每根导线面积的乘积。 J11=; %其中定子电流初步估计值 I11=IKW/(eta*cos(phi)) Nt1Ac11=I11/(a1*J11)
交流调速系统仿真分析 1 课题来源 本课题来源于三峡大学电气与新能源学院毕业论文自选课题。 2 研究的目的和意义 电动机(尤其是交流电动机)在工业.农业.交通运输.国防军事设施以及日常生活中被广泛的应用。其中许多的场合有着调速的要求从节能的角度出发。开发研究与风机,泵类负载相适应的配套调速装置,市场是非常广阔的,与我国的经济能源状况相适应,对交流系统进行建模仿真,可以熟悉交流调速系统的结构,掌握各种调速系统的优缺点,选择合理的方案,解决实际中的问题。 3 国内外的研究现状和发展趋势 目前,交流调速已进入逐步替代直流调速的时代。电力电子器件的发展为交流调速奠定了物质基础。50年代末出现了晶闸管,由晶闸管构成的静止变频电源输出方波和阶梯波的交变电压,取代旋转变频机组实现了变频调速,然而晶闸管属于半控型器件,可以控制导通,但不能由门极控制关断,因此由普通晶闸管组成的逆变器用于交流调速必须附加强迫换相电路。70年代以后,功率晶体管(GTR).门极关断晶闸管(GTO晶闸管).功率场效应晶闸管(Power MOSFET).绝缘栅双极晶体管(IGBT)。 MOS控制晶闸管(MCT)等已经先后问世,这些器件都是既能控制导通又能控制关断的自关断器件,又称全控型器件。它不再需要强迫换相电路,使得逆变器构成简单.结构紧凑。IGBT由于兼有MOSFET和GTR的优点,是用于中小功率目前最为流行的器件,MCT则综合了晶闸管的高电压.大电流的特性和MOSFET的快速开关特性,是极有发展前景的大功率.高频率开关器件。电力电子器件正在向大功率化.高频化.模块化.智能化的方向发展。80年代以后出现的功率集成电路(Power IC),集功率开关器件,驱动电路,保护电路,接口电路于一体,目前已应用于交流调速的智能功率模块(Intelligent Power Module IPM)采用IGBT作为功率开关,含有电流传感器.驱动电路及过载.短路.超温.欠电压保护电路,实现了信号处理.故障诊断.自我保护等多种智能功能,既减少了体积.减轻了重量,又提高了可靠性,使用.维护都更加方便,是功率器件的重要发展方向。
unction [sys,x0,str,ts,simStateCompliance] = BLDC_S(t,x,u,flag) %-----------------------------------------------------------------------
% 状态变量:X(1)=ia;X(2)=ib;X(3)=ic;X(4)=SETA;X(5)=OMEGA; % 输入量:u(1)=Ud; u(2)=TL; % 输出量:n, Tem, ia, ib, ic; %------------------------------------------------------------------------ %-----------------电动机参数--------------------------------------------- R = 0.23;L = 0.00498; M = -0.00005478; J = 0.025; P0=2; % 极对数 RR = diag([R R R]); LL = diag([L-M,L-M,L-M]); S = [2,-1,-1; -1,2,-1; -1,-1,2]/3; %----------------------------------------------------------------------- %SFUNTMPL General M-file S-function template % With M-file S-functions, you can define you own ordinary differential % equations (ODEs), discrete system equations, and/or just about % any type of algorithm to be used within a Simulink block diagram. % % The general form of an M-File S-function syntax is: % [SYS,X0,STR,TS,SIMSTATECOMPLIANCE] = SFUNC(T,X,U,FLAG,P1,...,Pn) % % What is returned by SFUNC at a given point in time, T, depends on the % value of the FLAG, the current state vector, X, and the current % input vector, U. % % FLAG RESULT DESCRIPTION % ----- ------ -------------------------------------------- % 0 [SIZES,X0,STR,TS] Initialization, return system sizes in SYS, % initial state in X0, state ordering strings % in STR, and sample times in TS. % 1 DX Return continuous state derivatives in SYS. % 2 DS Update discrete states SYS = X(n+1) % 3 Y Return outputs in SYS. % 4 TNEXT Return next time hit for variable step sample % time in SYS. % 5 Reserved for future (root finding). % 9 [] Termination, perform any cleanup SYS=[]. % % The state vectors, X and X0 consists of continuous states followed % by discrete states. % % Optional parameters, P1,...,Pn can be provided to the S-function and % used during any FLAG operation. % % When SFUNC is called with FLAG = 0, the following information % should be returned: % % SYS(1) = Number of continuous states. % SYS(2) = Number of discrete states. % SYS(3) = Number of outputs. % SYS(4) = Number of inputs. % Any of the first four elements in SYS can be specified % as -1 indicating that they are dynamically sized. The % actual length for all other flags will be equal to the % length of the input, U. % SYS(5) = Reserved for root finding. Must be zero. % SYS(6) = Direct feedthrough flag (1=yes, 0=no). The s-function % has direct feedthrough if U is used during the FLAG=3 % call. Setting this to 0 is akin to making a promise that % U will not be used during FLAG=3. If you break the promise % then unpredictable results will occur. % SYS(7) = Number of sample times. This is the number of rows in TS. % % X0 = Initial state conditions or [] if no states. %
转速开环恒压频比控制的交流异步电动机调速系统仿真 一:课题背景: 随着时间经济的不算发展,科学技术的不断提高,充分有效的利用能源已成为紧迫的问题,为了寻求高效可用的能源,各个国家都投入大量的人力和财力,进行不懈的努力研究。就目前而言,电能是全世界消耗最多的能源之一,同时也是浪费最多的能源之一,为解决能源问题先从电能着手,其中其代表性的就是电机的控制。电机是一种将电能转换成机械能的设备,它的用途非常广泛,在现代社会生活中随处可见电机的身影,在发达国家中生产的总电能有一半以上用于电机的能量转换,而这些电机转动系统当中的90%左右又是交流异步电动机。在国内,电机的总装机容量已达4亿千瓦,年耗电量达6000亿千瓦时,约占工业耗电量的80%,并且使用中的电机绝大部风还是中小型异步电机,加之设备的陈旧,管理、控制技术跟不上,所浪费的电能甚多。能源工业作为国名经济的基础,对于社会、经济的发展和人民生活水平的提高都起着极为重要的作用,在高速增长的经济条件下,我国能源工业面临着经济增长与环境保护的双重压力。有资料表明,的、受资金、技术能源价格的影响,我国能源利用效率比发达国家低很多。为此,国家十五计划中,在电机系统节能方面投入的资金高达500亿元左右,由此可见,在我国异步电动机的变频调速系统将有着巨大的市场潜能。
二:仿真原理 转速开环恒压频比控制室交流电动机变频调速最基本的控制方式,一般变频调速装置都带有这项功能,恒压频比的转速开环工作方式能满足大多数场合交流异步电动机调速控制的要求,并且使用更方便,是通用变频器的基本方式。采用恒压频比控制,在基频以下的调速过程中可以保持电动机气隙磁通基本不变,在恒定负载情况下(恒转矩),电动机在变频调速过程中的转差率基本不变,所以电动机的机械特性较硬,电动机有较好的调速性能。但是如果频率较低,定子阻抗压降所占的比重较大,电动机就很难保持气隙磁通不变,电动机的最大转矩将所频率的下降而减小。为了使电动机在低频低速时仍有较大的转矩,在低频时应适当提高钉子电压(低频电压补偿)使电动机在低频时仍有较大的转矩。 三:MATLAB介绍: MATLAB的含义是矩阵实验室(MATRIX LABORATORY),主要用于方便矩阵的存取,其基本元素是无须定义维数的矩阵。MATLAB自问世以来,就是以数值计算称雄。MATLAB进行数值计算的基本单位是复数数组(或称阵列),这使得MATLAB高度“向量化”。经过十几年的完善和扩充,现已发展成为线性代数课程的标准工具。由于它不需定义数组的维数,并给出矩阵函数、特殊矩阵专门的库函数,使之在求解诸如信号处理、建模、系统识别、控制、优化等领域的问题时,显得大为简捷、高效、方便,这是其它高级语言所不能比拟的。美国许多大学的实验室都安装有MATLAB供学习和研究之用。在那里,MATLAB 是攻读学位的大学生硕士生、博士生必须掌握的基本工具。MATLAB 中包括了被称作工具箱(TOOLBOX)的各类应用问题的求解工具。工具箱实际上是对MATLAB进行扩展应用的一系列MATLAB函数(称为M 文件),它可用来求解各类学科的问题,包括信号处理、图象处理、控制系统辨识、神经网络等。随着MATLAB版本的不断升级,其所含
任务书 1.设计题目 转速、电流双闭环直流调速系统的设计 2.设计任务 某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据为: 直流电动机:U n =440V,I n =365A,n N =950r/min,R a =, 电枢电路总电阻R=, 电枢电路总电感L=, 电流允许过载倍数=, 折算到电动机飞轮惯量GD2=20Nm2。 晶闸管整流装置放大倍数K s =40,滞后时间常数T s = 电流反馈系数=A (10V/ 转速反馈系数= min/r (10V/nN) 滤波时间常数取T oi =,T on = ===15V;调节器输入电阻R a =40k 3.设计要求 (1)稳态指标:无静差
(2)动态指标:电流超调量5%;采用转速微分负反馈使转速超调量等于0。 目录 任务书.......................................................... I 目录........................................................... II 前言 (1) 第一章双闭环直流调速系统的工作原理 (2) 双闭环直流调速系统的介绍 (2) 双闭环直流调速系统的组成 (3) 双闭环直流调速系统的稳态结构图和静特性 (4) 双闭环直流调速系统的数学模型 (5) 双闭环直流调速系统的动态数学模型 (5) 起动过程分析 (6) 第二章调节器的工程设计 (9) 调节器的设计原则 (9) Ⅰ型系统与Ⅱ型系统的性能比较 (10) 电流调节器的设计 (11) 结构框图的化简和结构的选择 (11) 时间常数的计算 (12) 选择电流调节器的结构 (13) 计算电流调节器的参数 (13) 校验近似条件 (14) 计算调节器的电阻和电容 (15) 转速调节器的设计 (15) 转速环结构框图的化简 (15)
实验报告 课程名称:数字调速 实验项目:三相异步电机恒压频比调速系统仿真专业班级:自动化1303班 姓名:任永健学号:130302307 实验室号:实验组号: 实验时间:批阅时间: 指导教师:成绩:
沈阳工业大学实验报告 (适用计算机程序设计类) 专业班级:自动化1303班学号:130302307 姓名:任永健 实验名称:三相异步电机恒压频比调速系统仿真 1.实验目的: 熟悉SIMULINK环境。 建立三相异步电机恒压频比调速系统模型并仿真分析。 2.实验内容: 设计并在simulinnk下搭建三相异步电机恒压频比环调速系统 3. 实验方案(程序设计说明) 异步电机的调速有多种方法,转速开环恒压频比控制是交流电动机变频调速最基本的一种控制转速方式,在一般的变频调速装置里面都嵌入有这项功能,工作方式为恒压频比的调速方式能满足大多数场合交流电动机调速控制的要求,使用起来也相对方便,是通用变频器的基本模式。但在低压时候需要一定的补偿电压,采用恒压频比控制,在基频以下的调速过程中的转差率会保持不变,电动机的所以会机械特性会相对较硬,电动机有较好的调速性能。 正选脉冲宽度调制三相逆变电路,是一种以三角波做载波的应用冲量等效原理而获得理想交流电源的电路装置,在调制比与载波比一定的条件下,通过调节外加直流电源的大小就可以获得在额定频率下产生额定电压的正选电压波,通过调节正弦波的频率就可以得到理想的电压频率波,而且调节输入正弦波的频率能得到线性的输出电压幅值。MATLAB在电气领域中的运用随处可见,在这里可以运用MATLAB里的Simulink仿真出具体的模型,通过示波器来观察具体的波形,从而进行进一步的分析。 4. 实验原理(系统的实现方案分析) 首先采用三相双极性SPWM逆变电路产生三相交流电源,全控型器件可以选用IGBT,这样通过调节外加直流电源的大小便可获的理想的输出交流电压源幅值,然后通过改变给定的频率信号来改变异步电机的转速,基本模型如下图所示
中小型异步电动机的MATLAB计算程序%%%%%%%%%%%%%%%%%%%%%%%%%第一部分额定数据和主要尺寸%%%%%%%%%%%%%%%%%%%%%%%%% myflag1 = 1; %myflag1 myflag1=1是三角形接法,myflag1=0是星 形接法 myflag2 = 0; %myflag2 myflag2=1是双层槽绝缘占面 积,myflag2=0是单层槽绝缘占面积 myflag3 = 1; %myflag3 myflag3=1是无径向通风道的铁心长 度,myflag3=0是定转子径向通风道不交错,其它是通 风道交错 myflag4 = 1; %myflag4 myflag4=1是无径向通风道的净铁心长 度,myflag4=0是有径向通风道的净铁心长度 myflag5 = 2; %myflag5 myflag5=1是双层线圈,myflag5=2是单层 线圈 myflag6 = 0; %myflag6 myflag6=1是平底槽,myflag6=0是圆底槽myflag7 = 0; %myflag7 myflag7=1是平底槽,myflag7=0是圆底槽myflag8 = 1; %myflag8 myflag8=1是圆底槽,myflag8=0是半开口 平底槽,其它为开口平底槽 myflag9 = 1; %myflag9 myflag9=1是半开口槽和半闭开口 槽,myflag9=0是开口槽 myflag10 = 1; %myflag10 myflag10=1是单层线圈,myflag10=0是双 层线圈 myflag11 = 1; %myflag11 myflag11=1是无径向通风道,myflag11=0 是有径向通风道 myflag12 = 3; %myflag12 myflag12=1是双层叠绕组,myflag12=2单 层同心式,myflag12=3单层同心式(分组的)、交叉 式,myflag12=4 单层链式 myflag13 = 1; %myflag13 myfalg13=1是无径向通风道,myflag13=0 是径向通风道
绪论 直流调速是指人为地或自动地改变直流电动机的转速,以满足工作机械的要求。从机械特性上看,就是通过改变电动机的参数或外加工电压等方法来改变电动机的机械特性,从而改变电动机机械特性和工作特性机械特性的交点,使电动机的稳定运转速度发生变化。 直流调速系统,特别是双闭环直流调速系统是工业生产过程中应用最广的电气传动装置之一。广泛地应用于轧钢机、冶金、印刷、金属切削机床等许多领域的自动控制系统中。它通常采用三相全控桥式整流电路对电动机进行供电,从而控制电动机的转速,传统的控制系统采用模拟元件,如晶体管、各种线性运算电路等,虽在一定程度上满足了生产要求,但是因为元件容易老化和在使用中易受外界干扰影响,并且线路复杂、通用性差,控制效果受到器件性能、温度等因素的影响,从而致使系统的运行特性也随之变化,故系统运行的可靠性及准确性得不到保证,甚至出现事故。 双闭环直流调速系统是一个复杂的自动控制系统,在设计和调试的过程中有大量的参数需要计算和调整,运用传统的设计方法工作量大,系统调试困难,将SIMULINK 用于电机系统的仿真研究近几年逐渐成为人们研究的热点。同时,MATLAB软件中还提供了新的控制系统模型输入与仿真工具SIMULINK,它具有构造模型简单、动态修改参数实现系统控制容易、界面友好、功能强大等优点,成为动态建模与仿真方面应用最广泛的软件包之一。它可以利用鼠标器在模型窗口上“画”出所需的控制系统模型,然后利用SIMULINK提供的功能来对系统进行仿真或分析,从而使得一个复杂系统的输入变得相当容易且直观。 本文采用工程设计方法对转速、电流双闭环直流调速系统进行辅助设计,选择适当的调节器结构,进行参数计算和近似校验,并建立起制动、抗电网电压扰动和抗负载扰动的MATLAB/SIMULINK仿真模型,分析转速和仿真波形,并进行调试,使双闭环直流调速系统趋于完善、合理。 2MATLAB简介 MATLAB是一门计算机编程语言,取名来源于Matrix Laboratory,本意是专门以矩阵的方式来处理计算机数据,它把数值计算和可视化环境集成到一起,非常直观,而且提供了大量的函数,使其越来越受到人们的喜爱,工具箱越来越多,应用范围也越来越广泛。 MATLAB最突出的特点就是简洁。MATLAB用更直观的,符合人们思维习惯的代码,代替了C和FORTRAN语言的冗长代码。MATLAB给用户带来的是最直观,最简洁的程序