2、试详细解释智能手机指南针的工作原理(并绘出其传感原理图)?
答:
1、手机装入软件能分出东南西北是因为手机中内置了电子指南针,电子指南针又称作电子罗盘。电子罗盘的原理是测量地球磁场,按其测量磁场的传感器种类的不同,目前国内市场上销售的电子罗盘可分为以下有三种:磁通门式电子罗盘、霍尔效应式电子罗盘和磁阻效应式电子罗盘。
(1)磁通门式电子罗盘。根据磁饱和原理制成,它的输出可以是电压,也可以是电流,还可以是时间差,主要用于测量稳定或低频磁场的大小或方向,其代表产品是美国KVH工业公司的一系列磁通门罗盘及相关附件。从原理上讲,它通过测量线圈中磁通量的变化来感知外界的磁场大小,为了达到较高的灵敏度,必须要增加线圈横截面积,因而磁通门式电子罗盘不可避免的体积和功耗较大,易碎、响应速度较慢,处理电路相对复杂,成本高。
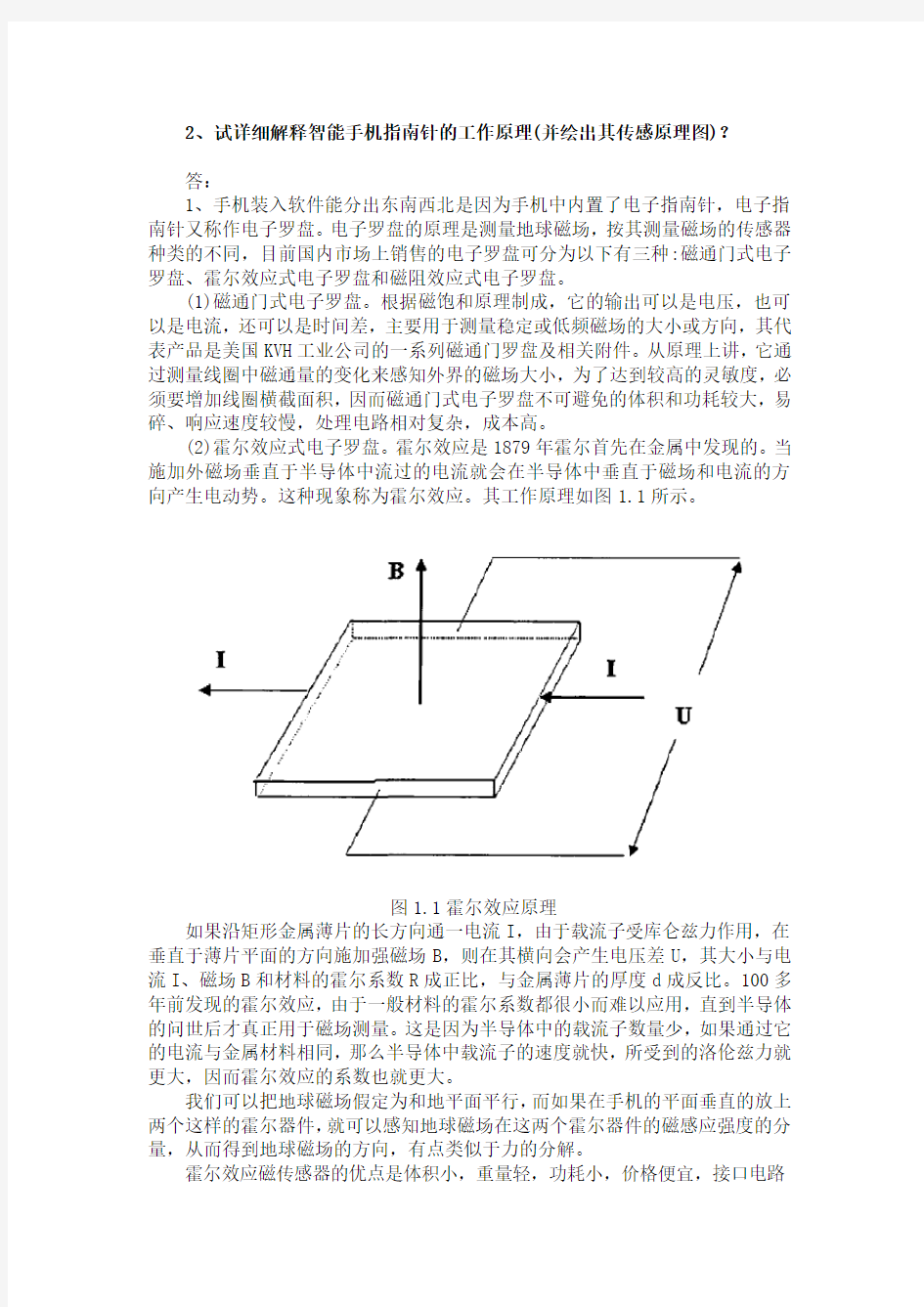
(2)霍尔效应式电子罗盘。霍尔效应是1879年霍尔首先在金属中发现的。当施加外磁场垂直于半导体中流过的电流就会在半导体中垂直于磁场和电流的方向产生电动势。这种现象称为霍尔效应。其工作原理如图1.1所示。
图1.1霍尔效应原理
如果沿矩形金属薄片的长方向通一电流I,由于载流子受库仑兹力作用,在垂直于薄片平面的方向施加强磁场B,则在其横向会产生电压差U,其大小与电流I、磁场B和材料的霍尔系数R成正比,与金属薄片的厚度d成反比。100多年前发现的霍尔效应,由于一般材料的霍尔系数都很小而难以应用,直到半导体的问世后才真正用于磁场测量。这是因为半导体中的载流子数量少,如果通过它的电流与金属材料相同,那么半导体中载流子的速度就快,所受到的洛伦兹力就更大,因而霍尔效应的系数也就更大。
我们可以把地球磁场假定为和地平面平行,而如果在手机的平面垂直的放上两个这样的霍尔器件,就可以感知地球磁场在这两个霍尔器件的磁感应强度的分量,从而得到地球磁场的方向,有点类似于力的分解。
霍尔效应磁传感器的优点是体积小,重量轻,功耗小,价格便宜,接口电路
简单,特别适用于强磁场的测量。但是,它又有灵敏度低、噪声大、温度性能差等缺点。虽然有些高灵敏度或采取了聚磁措施的霍尔器件也能用于测量地磁场,但一般都是用于要求不高的场合。
(3)磁阻效应式电子罗盘。利用具有磁阻效应的材料制成,这些磁阻传感器在线性范围内输出电压与被测磁场成正比,其灵敏度和线性度等方面的性能明显优于霍尔器件,同时体积小、功耗低、抗干扰能力强、温度特性好、易于与数字电路匹配。众所周知,迟滞误差和零点温度漂移是影响传感器性能及稳定性的重要因素,同时由于地磁场强度仅为0.5-0.6gauss,外界磁场干扰成为电子罗盘信噪比较小的重要因素。
2、由于磁阻效应式电子罗盘明显优于前两者,所以是目前的主流。
磁阻电子罗盘基于磁阻效应,利用磁阻传感器感测地球磁场强度在X,Y,Z轴的三个分量,结合加速度传感器测量载体的俯仰角和翻滚角并以此对X, Y轴的磁场强度作补偿校正,从而确定载体的地理航向角和姿态角。下面介绍磁阻传感器的磁阻效应和磁阻电子罗盘的测量原理。
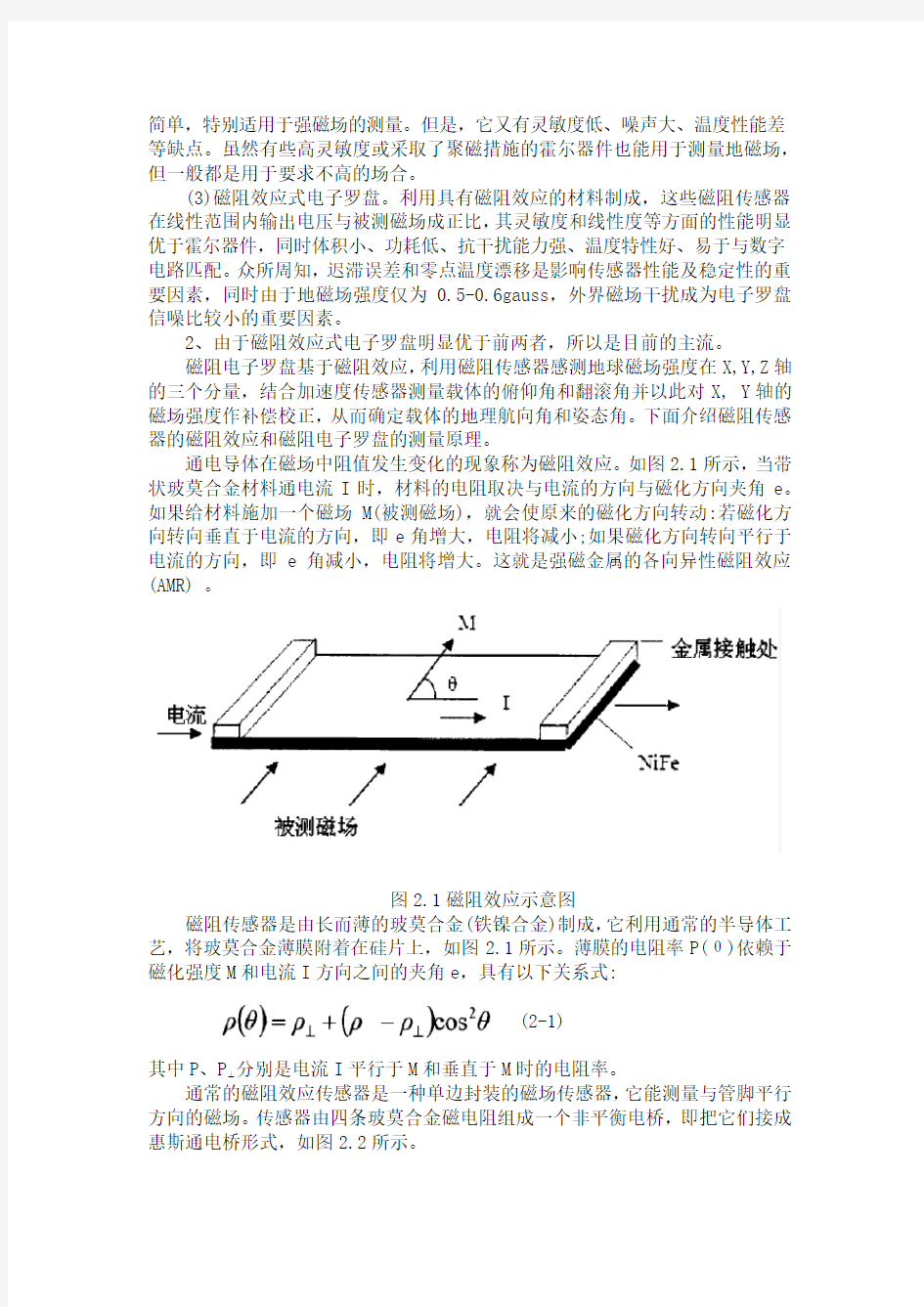
通电导体在磁场中阻值发生变化的现象称为磁阻效应。如图2.1所示,当带状玻莫合金材料通电流I时,材料的电阻取决与电流的方向与磁化方向夹角e。如果给材料施加一个磁场M(被测磁场),就会使原来的磁化方向转动:若磁化方向转向垂直于电流的方向,即e角增大,电阻将减小;如果磁化方向转向平行于电流的方向,即e角减小,电阻将增大。这就是强磁金属的各向异性磁阻效应(AMR) 。
图2.1磁阻效应示意图
磁阻传感器是由长而薄的玻莫合金(铁镍合金)制成,它利用通常的半导体工艺,将玻莫合金薄膜附着在硅片上,如图2.1所示。薄膜的电阻率P(θ)依赖于磁化强度M和电流I方向之间的夹角e,具有以下关系式:
(2-1)
分别是电流I平行于M和垂直于M时的电阻率。
其中P、P
⊥
通常的磁阻效应传感器是一种单边封装的磁场传感器,它能测量与管脚平行方向的磁场。传感器由四条玻莫合金磁电阻组成一个非平衡电桥,即把它们接成惠斯通电桥形式,如图2.2所示。
图2.2惠斯通电桥结构
未加磁场时,四个桥臂的阻值相等,电桥处于平衡状态,输出为零;当有外加磁场时,电桥的阻值发生变化,如图2.2所示,电桥中位于相对位置的两个电阻阻值增大? R ,另外两个电阻的阻值减小? R ,电桥平衡被打破,输出电压信号:V out =(? R/R)V b 。显然当外加磁场向东时,输出为- V out ;而外加磁场向北时,输
出为0;由此得以导航。
目前,磁阻传感器的灵敏度和线性度已经能满足磁罗盘的要求,各方面的性能明显优于霍尔器件。迟滞误差和零点温度漂移还可采用对传感器进行交替正向磁化和反向磁化的方法加以消除。但是磁阻传感器存在一个很重要的问题是其翻转效应,这是其原理所固有的。如果在使用前对磁性材料进行了磁化,以后若遇到了较强的相反方向的磁场(一般大于20高斯)就会对材料的磁化产生影响,从而改变磁阻传感器的输出特性,使输出信号减弱,灵敏度降低,在极端的情况下,会使磁化方向翻转1800。这种危险虽然可以利用周期性磁化的方法加以消除,但仍存在问题。对材料进行磁化的磁场必须很强,如果采用外加线圈来产生周期性磁化磁场,就失去了小型化的意义。霍尼韦尔公司的一项专利,解决了这个问题。他们在硅片上制作一个置位/复位电流带,该电流带阻值4欧姆左右,磁化电流持续时间2微秒,电流强度达2}3安培,即可实现对磁矩的重新校准,使磁阻传感器恢复正常工作状态。
在了解磁阻传感器工作原理的基础上,为了清楚的说明磁阻电子罗盘测量载体地理航向角和姿态角的工作原理,需要对磁阻电子罗盘方向和姿态测量的几个角度参数作简单的说明。
(1)地磁偏角。地球本身是块大磁铁,地磁北极由地球内部的稳定磁场决定,地理北极在地球的旋转轴处,是地球上经线的汇聚处。地磁偏角就是地球南北极连线与地磁南北极连线交叉构成的夹角,本文用γ表示。地磁偏角如图2.3所示。根据规定,磁针指北极N 向东偏则磁偏角为正,向西偏则磁偏角为负。
图2.3地磁偏角
由于地磁极不断变动,所以地磁偏角随地点的变化而变化,即便在同一地点的地磁偏角大小也随着时间的推移而不断改变。磁偏角可以用磁偏测量仪测出来,目前己经有专门的机构将各地区的磁偏角绘制成地图,并且是考虑了各种因素在内的,如大的铁磁材料和一些自然变化等,可以直接查找。
(2)磁倾角。地球表面任一点的地磁场总强度的矢量方向与水平面的夹角成为磁倾角。将一个具有水平轴的可旋转磁针制做得内部质量完全均匀对称,使其在磁屏蔽空间中自然地保持水平。观测时使其水平轴与当地磁子午面垂直,这时磁针指北极N所指的方向即为地磁场总强度的矢量方向,它与水平面的夹角即为当地的磁倾角。这种磁针称为磁倾针。规定磁倾针的指北极N向下倾为正。一般结果是,北半球的磁倾角为正,南半球的磁倾角为负。将磁倾角为零的地点连结起来,此线称为磁倾赤道,与地球赤道比较接近。
(3)地理航向角。磁阻电子罗盘应用在载体上,地理航向角定义为载体前进方向(即载体纵轴方向)在水平面上的投影与真实北极(地理北极)的夹角。用0 o-360 o范围的角度值表示。如飞机向正东飞时,航向角为900。而载体前进方向(即载体纵轴方向)在水平面上的投影与地磁北极的夹角定义为地磁航向角。本文地磁航向角用β表示,地理航向角用ψ表示。
(4)姿态角。磁阻电子罗盘中不可缺少的一部分是对载体倾斜姿态的测量,它是动态测量中非常重要的一个方面。姿态角包括两部分:俯仰角和翻滚角。以水平面为基准,罗盘系统载体的前进方向(纵轴方向)与其在水平面投影的夹角称为俯仰角,用φ表示,本文中规定上仰为正,下俯为负;罗盘平面上与前进方向垂直的方向(横轴方向)与其在水平面投影的夹角称为翻滚角,用θ表示,本文中规定右转为正,左转为负。
磁阻电子罗盘主要是基于磁阻效应,通过感测地球磁场来确定载体的航向和姿态。磁阻传感器芯片HMC 1002包含两个互相垂直的惠斯通电桥,可以测量地球磁场强度在X轴和Y轴上的分量;而HMC 1001则包含一个惠斯通电桥,用来测量地球磁场强度在Z轴的分量。每个电桥的输出是一个与感测的磁场强度和电桥的供电电压成正比的差动电压。该信号经过调理之后进入A/D转换芯片ADS7864进行数据的采集。两轴加速度传感器利用一个由独立固定片和依附于运动质点的中心片所组成的差分电容器,任何方向的加速度将使衡量发生偏转从而使差分电容器失衡的原理测得俯仰、翻滚角,从而完成对磁阻电子罗盘进行姿态角的测量及其对X, Y轴磁场强度的计算补偿。考虑罗盘坐标系与地球坐标系的关系,磁航向角β的求取可分二维系统和三维系统两种情况进行分析。
当载体处于二维空间时,其罗盘坐标系与水平坐标系重合,即X轴和Y轴在
水平面内,Z轴铅垂向下,如图2.4所示。安装时,X轴与载体前进方向重合,Y轴与载体横轴方向重合,在不考虑磁倾角a的情况下,地球磁场沿水平面分布,即只有图中H磁北方向的地磁场,因此Z轴感测到的磁场分量为零,Hx和Hy分别为磁阻传感器的水平面两个轴感测到的磁场强度分量。
图2.4载体处于二维空间时的磁场分解图
由上节内容可知,定义载体前进方向与磁北的夹角为地磁航向角刀,其与地理北极的夹角为地理航向角ψ,根据上述可知,ψ=β±γ, γ为磁偏角。已知磁偏角γ,求出地磁航向角β即可求得载体的地理航向角。此时只要利用两轴的磁阻传感器检测Hx和Hy的值即可求得载体的地磁航向角β
(2-2)
上述罗盘要求使用时一定要保持罗盘的水平,是一种理想状态情况下的航向角测量方案。然而,通常电子罗盘是装在飞行器、船舶、陆地车辆等载体上,处于动态环境中。因此,电子罗盘工作中并非总处于水平状态,这就使其应用大受限制。解决上述问题现在常用的方法有两种:一种方法是用机械万向节使磁传感器始终处于水平面内,以保证用式(2-2)计算航向角的精度; 另一种方法是采用捷联式或三维电子罗盘。
载体处于三维空间中时,罗盘坐标系与水平坐标系不重合,即载体出现俯仰、翻滚的情况,因此,必须用三轴的磁阻传感器来检测地球磁场的三个分量,然后求出它们在水平面的投影,才能求得方位角。本设计即采用一个单轴磁阻传感器和一个双轴磁阻传感器共同搭建一个三轴的磁阻传感器。
图2.5三维空间时载体的姿态
如图2.5所示,通过加速度计感知重力加速度在X, Y轴上的分量而测得俯仰角φ和翻滚角θ,并结合z轴磁阻传感器所测量到的磁场分量,根据矢量三角形,可得折算到地球坐标系下磁场强度H*x和H*y的计算公式为
(2-3)
(2-4)
一旦求出H*x和H*y分量,就可以计算出罗盘所在载体的地磁航向角β:
(2-5)
考虑到反正切函数的值域β∈[0, 180 o],且使地磁航向角在0 o -360 o的范围表示,根据公式2-3, 2-4, 2-5,以及对罗盘坐标系和水平坐标系变换的分析,各坐标轴和不同的象限内刀的值分别为:
根据上式算出的地磁航向角,只需加上当地的地磁偏角即可求得此时的地理航向角。