G P S 相对定位原理
1. 相对定位原理概述
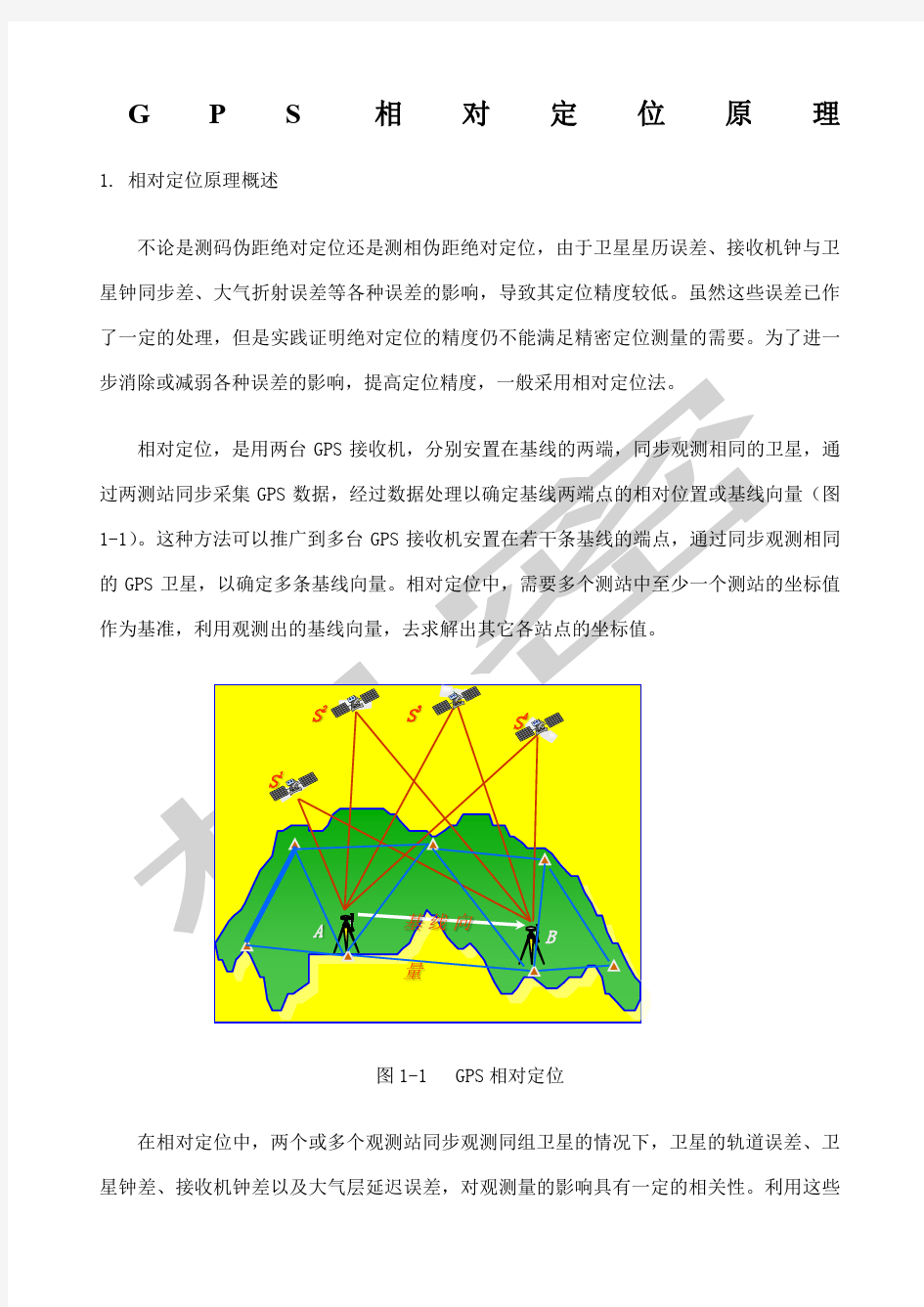
不论是测码伪距绝对定位还是测相伪距绝对定位,由于卫星星历误差、接收机钟与卫星钟同步差、大气折射误差等各种误差的影响,导致其定位精度较低。虽然这些误差已作了一定的处理,但是实践证明绝对定位的精度仍不能满足精密定位测量的需要。为了进一1-1的图1-1 GPS 相对定位
在相对定位中,两个或多个观测站同步观测同组卫星的情况下,卫星的轨道误差、卫星钟差、接收机钟差以及大气层延迟误差,对观测量的影响具有一定的相关性。利用这些
基线向量
A
S 1
S 2
S 3
S 4
观测量的不同组合,按照测站、卫星、历元三种要素来求差,可以大大削弱有关误差的影响,从而提高相对定位精度。
根据定位过程中接收机所处的状态不同,相对定位可分为静态相对定位和动态相对定位(或称差分GPS定位)。
2. 静态相对定位原理
。
T静止不动的对一组卫星确定初始整周模糊度(初始化),再利用一台GPS接收机在基准站
T上流动,每到一个站点则停进行连续的观测,而另一台接收机在基准站附近的多个站点
i
下来进行静态观测,以便确定流动站与基准站之间的相对位置,这种“走走停停”的方法称为准动态相对定位。其观测效率比经典静态相对定位方法要高,但是流动站的GPS接收机必须保持对观测卫星的连续跟踪,一旦发生失锁,便需要重新进行初始化工作。这里将讨论静态相对定位的基本原理。
2.1 观测值的线性组合
假设安置在基线端点的GPS 接收机()1,2i T i =,相对于卫星j S 和k S ,于历元()1,2i t i =进行同步观测(如图2-1),则可获得以下独立的载波相位观测量:
()11j t φ,()12j t φ,()11k t φ,()12k t φ,()21j t φ,()22j t φ,()21k t φ,()22k t φ
双差、① 单差(Single-Difference ):不同观测站同步观测同一颗卫星所得观测量之差
()()21j j j t t φφφ?=- (2-1)
② 双差(Double-Difference ):不同观测站同步观测同组卫星所得的观测量单差之差
j
()()()
()()()()2
1
2
1
k k j k
k
j j t t t t t t t φφφφ
φφφ??=?-?????=---????
(2-2)
③ 三差(Triple-Difference ):不同历元同步观测同组卫星所得的观测量双差之差
()()()
()()()()()()()(){}
2122112
2122
21
2k k k k j k j
k
k j
j t t t t t t t t t t t δφφφφφφφφ
φ
φφ??=??-??????=?-?-?-?????
????=---???? (2-3)
测相伪距观测方程为:
()()()()()()()0,,j j j j j j
i i i i i I p i T t t c t t t t N t t t λφρδδλ??=+--+?+??? (2-4)
参见图2-2,将(2-4)式的测相伪距观测方程应用于测站1T 、2T ,并代入(2-1)式,可得:
T 2
S j (t)
T 1
()()()()()()()()()()()21212
12,2,1,1,j j j j j
j
j
j j I
T
I
T
t t t c t t t t N t N t t t t t λφρρδδλ?????=-+---????????????+?
+?-?+?????
(2-5)
令()()()21t t t t t t δδ?=-,()()21j j j N N t N t ?=-
()()()2,1,j j j I I I t t t ??=?-?,()()()2,1,j j j
T T T t t t ??=?-?
(2-6) ),
图2-3 双差示意图
参见图2-3,两台GPS 接收机安置在测站1T 、2T ,对卫星j S 的单差为()j t φ?,对卫星k
S T 2
S j
(t)
S k (t)
T 1
的单差为()k t φ?,则由(2-6)式,双差观测方程可表示为:
()()()()()()()()2121k k k k j j
j t t t t t t N φλφρρρρλ?????=----????
(2-7) 在上式中可见,接收机的钟差影响完全消除,大气折射残差取二次差可以略去不计。这是双差模型的突出优点。
(2-8)
过程中已经预先解算出来。因此,准动态相对定位可以在非常短的时间内获得与经典静态相对定位精度相当的定位结果。
根据(2-4)式的测相伪距观测方程,若整周模糊度()0j i N t 已经确定,将其移到等式左端,则测相伪距观测方程可以写为
()()()()()(),,j j j j j
i i i i I i T R t t c t t t t t t ρδδ??=+-+?+???
(2-9)
式中:()()()0j j j i i i R t t N t λφλ=+。
若忽略大气折射残差影响,则上式求取站间单差观测方程可得:
()()()()21j j j
R t t t c t t ρρ???=-+??? (2-10)
若采用双差模型进行准动态相对定位,则由(2-9)式,再对卫星间取双差可得:
2-11)
取两个观测站1T 和2T ,其中1T 为基准站,其坐标已知。线性化的载波相位单差观测方程:
()()()()()()()()()222222201111j j j j
j j j j j
I T x t l t m t n t y f t t N z t t t t δφδλδρρλλ???????=-+?-??
???????
????+??+??+-?
??? (2-12)
式中,大气折射延迟误差的残差很小,忽略。于是相应的误差方程可写成如下形式:
()()()()()()2222221
j j j j j j x v t l t m t n t y f t t N l t z δδλ
δ??
?????=
-?+?+?????????
(2-13) 式中:()()()()2011
j j j j
l t t t t φρρλ
???=?-
-?? t
(()()()()()()()()()()()()
222222200t n v v t a t b t c t t t l t X N v c t δ????????????????=+?++??????????????????????????上式可写为
22-15)
或者
()L t N X C B A V +????
?
???????=2δ (2-16)
按最小二乘法求解:
[
]1
2X A A N B P A B C B PL t C C δ-??????
???????????=????????????????
??????????
(2-17)
式中,P 为单差观测量的权矩阵。
2-18)
j S
式中()()()k k j t t t φφφ??=?-?,()()()()()()222222222k
k j k k j m t m t m t n t n t n t ?????=-?????????-????
,k k j N N N ??=?-?.
相应的误差方程可以写为:
()()()()()2222221
k k k
k
k k x v t l t m t n t y N l t z δδλ
δ??
????=
???+??+??????
????
(2-19)
式中:()()()()()()()()2012011
k k k k j j l t t t t t t φρρρρλ
????=??-
---??。 当同步观测的GPS 卫星为j n 时,可将(2-19)式推广成如下形式的方程组: 上式可写为:
()()()()2k v t a t X b t N l t δ=+??+?? (2-20)
()()()()()()()()
22222t a t b t l t X N δ????????
?=+??+?????????????? (2-21)
2-22) 2P A B PL N B B =????????????????
?? (2-23)
式中,P 为单差观测量的权矩阵。
2.3.3 三差模型
假设两个观测站1T 和2T 于历元1t 、2t 分别同步观测了两颗卫星j S 和k S ,其中1T 为基准
站,其坐标已知,j S 为参考卫星。根据三差观测方程(2-8)式,则可得三差观测方程的线性化形式:
式中: ()()()21k k k t t t δφφφ??=??-??
()()()()()()2222
122221k
k j k k j k k j l t l t l t m t m t m t δδ??????-??????=?-?????,()()()()()()()()()20202201112
1120202201k k k k k k
j j j t t t t t t t t t δρρρδρρρδρρρ????
-????-????=????-
2-24)
()()()()()()()()()()22222111111j j j j n n n n t l t m t n t l t y z δδδδδλδδδδδ-----????????????=+????
????????????(2-25)
上式可写为:
()()()2v t a t X l t δ=+ (2-26)
如果两观测站对同一组卫星j n 同步观测了t n 个历元,并于某一个历元为参考历元,则可将误差方程组(2-26)进一步推广,可写成:
()()()
()
()()
()
()()
11122221
1
1
t t t n n n v t a t l t v t a t l t X v t a t l t δ---??????
?
??
?????????
=+?????????
??
?????????????
(2-27) 或者
L X A V +=2δ (2-28)
2-29)
3. 数据,对用户站观测量进行改正,这种数据处理本质上是求差处理(差分),以达到消除或减少相关误差的影响,提高定位精度,因此GPS 动态相对定位通常又称为差分GPS 定位。
动态相对定位过程中存在着三部分误差:第一部分是对每一个用户接收机所公有的,包括卫星钟误差、星历误差、电离层误差、对流层误差等;第二部分为不能由用户测量或由校正模型来计算的传播延迟误差;第三部分为各用户接收机所固有的误差,包括内部噪
声、通道延迟、多路径效应等。利用差分技术,第一部分误差完全可以消除,第二部分误差大部分可以消除,其主要取决于基准接收机和用户接收机的距离,第三部分误差则无法消除。
在差分GPS 定位中,按照对GPS 信号的处理时间不同,可划分为实时差分GPS 和后处理差分GPS 。实时差分GPS 就是在接收机接收GPS 信号的同时计算出当前接收机所处位置、速度及时间等信息;后处理差分GPS 则是把卫星信号记录在一定介质(GPS 接收机主机、
由于相对定位中基准站0T 的坐标值预先采用大地测量、天文测量或GPS 静态定位等方法精密测定,可视为已知的,设其精密坐标值为()000,,X Y Z 。而在基准站上的GPS 接收机利用测码伪距绝对定位法测出的基准站坐标为(),,X Y Z ,该坐标测定值含有卫星轨道误差、卫星钟和接收机钟误差、大气延迟误差、多路径效应误差及其他误差。则可按照下式计算基准站的位置修正数:
??
?
??
-=?-=?-=?Z Z Z Y Y Y X X X 000 (3-1) 基准站采用数据链将这些改正数发送出去,而流动站用户接收机通过数据链实时接收这些改正数,并在解算时加入。设流动站i T 通过用户接收机利用自身观测的数据采用测码伪距绝对定位法测定出其位置坐标为(),,i i i X Y Z ''',则可按照下式计算流动站i T 的较精确坐标
(
i X (3-2) (3-3)
位置差分的计算方法简单,只需要在解算的坐标中加进改正数即可,这对GPS 接收机的要求不高,适用于各种型号的接收机。但是,位置差分要求流动站用户接收机和基准站接收机能同时观测同一组卫星,这些只有在近距离才可以做到,故位置差分只适用于100km 以内。
3.1.2 伪距差分
伪距差分的基本原理:利用基准站0T 的伪距改正数,传送给流动站用户i T ,去修正流动站的伪距观测量,从而消除或减弱公共误差的影响,以求得比较精确的流动站位置坐标。
设基准站0T 的已知坐标为()000,,X Y Z 。差分定位时,基准站的GPS 接收机,根据导航电文中的星历参数,计算其观测到的全部GPS 卫星在协议地球坐标系中的坐标值
(),,j
j j X
Y Z ,从而由星、站的坐标值可以反求出每一观测时刻,由基准站至GPS 卫星的真
(3-4)
(3-5) (3-6)
i 的伪距:
()()()()000j j j j i i t t t d t t ρρρρ'=+?+- (3-7)
并按照下式计算流动站坐标()()()(),,i i i X t Y t Z t :
()()j i i t c t t V ρδ=
+ (3-8)
式中:()t t δ为流动站用户接收机钟相对于基准站接收机钟的钟差;i V 为流动站用户接收机噪声。
伪距差分时,只需要基准站提供所有卫星的伪距改正数,而用户接收机观测任意4颗卫星,就可以完成定位。与位置差分相似,伪距差分能将两测站的公共误差抵消,但是,
(1)测相伪距修正法
测相伪距修正法的基本思想:基准站接收机0T 与卫星j S 之间的测相伪距改正数0j ρ?在基准站解算出,并通过数据链发送给流动站用户接收机i T ,利用此伪距改正数0j ρ?去修正用户接收机i T 到观测卫星j S 之间的测相伪距j i ρ',获得比较精确的用户站至卫星的伪距,再
采用它计算用户站的位置。
在基准站0T 和观测卫星j S ,则由卫星坐标和基准站已知坐标反算出基准站至该卫星的真距离为
0j ρ=
(3-9)
(0X 3-10)
SA 政策
000000,0,00I p T 3-11)
另一方面,流动站i T 上的用户接收机同时观测卫星j S 可得到测相伪距观测值为:
(),,j j j j j j i i i i i I p i T i i c t t m v ρρδδδρδ'=+-++?+?++ (3-12)
式中各项的含义与(3-10)相同。
在用户接收机接收到由基准站发送过来的伪距改正数0j ρ?时,可用它对用户接收机的测相伪距观测值j i ρ'进行实时修正,得到新的比较精确的测相伪距观测值j i ρ'':
当用户站距基准站距离较小时(<100km ),则可以认为在观测方程中,两观测站对于同一颗卫星的星历误差、大气层延迟误差的影响近似相等。同时用户机与基准站的接收机为同型号机时,测量噪声基本相近。于是消去相关误差,可简写成:
3-13)
3-14)
j i ρ'',将(3-13)式带入(3-14)中,同时用j 0ρ代替j
ρ',则有: ()()()()()()00000000j j j
i j j j j
i i i i i i d N t N t N t t N t t t t ρλλλδφδφ???=+-??
????+---+-????
(3-15)
上式中假设在初始历元0t 已将基准站和用户站相对于卫星j S 的整周模糊度()00j N t 、
()0j i N t 计算出来了,则在随后的历元中的整周数()00j i N t t -、()0j i i N t t -以及测相的小数部分()0j i t δφ、()j i i t δφ都是可观测量。因此,上式中只有4个未知数:用户站坐标,,i i i X Y Z 和残差d ?,这样只需要同时观测4颗卫星,则可建立4个观测方程,解算出用户站的三维坐标。
从上面分析可见,解算上述方程的关键问题是如何快速求解整周模糊度。近年来许多法、消
k ,基准站T
()()()()()()()()()()()()()()()()()()()()()()()()010*******,10,111110,1,10101011000,10,1111p p
p j j j j j j
I T j j j j j j i i i i i I i T k k k k k k I T k k i i i f f t t f t t t t N t t t c c
f f t t f t t t t N t t t c c f f t t f t t t t N t t t c c
f t t f t t t c φρδδφρδδφρδδφρδδ????=+--+?+???????
??=+--+?+?????????=+--+?+?????=+-()()()()()()()()()()()
10,1,1020202
2000,20,2p p k k k k
i i I i T j j j j j j I T f t N t t t c
f f t t f t t t t N t t t c c φρδδ????-+?+?????????=+--+?+????????
???
??????
???(3-16) 4???????
???
?????
将两接收机0T 和i T 上同时观测两颗卫星j S 、k S 的载波相位观测量的站际单差相减,可得到2个双差方程:
()()()()()()()()()()()()()()()()()()()()()()2111211100000021112111000000k
k k j j k j j k i i k k k j j k j j k i i f
t t t t t N t N t N t N t c f t t t t t N t N t N t N t c
φρρρρφρρρρ?????=---+-+-?????
?????=---+-+-??
??(3-18)