最优控制综述 摘要:最优化方法是一种求极值的方法,即在一组约束为等式或不等式的条件下,使系统的目标函数达到极值,即最大值或最小值。从经济意义上说,是在一定的人力、物力和财力资源条件下,使经济效果达到最大(如产值、利润),或者在完成规定的生产或经济任务下,使投入的人力、物力和财力等资源为最少。而最优控制通常针对控制系统而言,目的在于使一个机组、一台设备或一个生产过程实现局部最优。本文重点阐述了最优系统常用的变分法、极小值原理和动态规划三种方法的基本理论及其在典型系统设计中的应用。 关键词:变分法、极小值原理、动态规划 1 引言 最优控制是分析控制系统常用的方法,是现代控制理论的核心之一。它尤其与航空航天的制导、导航和控制技术密不可分。最优控制理论所研究的问题可以概括为:对一个受控的动力学系统或运动过程,从一类允许的控制方案中找出一个最优的控制方案,使系统的运动在由某个初始状态转移到指定的目标状态的同时,其性能指标最优。 这类问题广泛存在于技术领域或社会问题中。例如,确定一个最优控制方式使空间飞行器由一个轨道转换到另一轨道过程中燃料消耗最少,选择一个温度的调节规律和相应的原料配比使化工反应过程的产量最多,制定一项最合理的人口政策使人口发展过程中的老化指数、抚养指数和劳动力指数为最优等,都是一些经典的最优控制问题。 最优控制问题是要在满足约束条件下寻求最优控制函数,使目标泛函取极值。求解动态最优化问题的方法主要有古典变分法,极小值原理及动态规划法等。 2 研究最优控制的前提条件 2.1状态方程 对连续时间系统: x t=f x t,u t,t 对离散时间系统:x(k+1)=f x k,u k,k k=0,1,……,(N-1)
第五章离散时间系统最优控制
?前面所讨论的都是关于连续时间系统的最优控制问题。?现实世界中,很多实际系统本质上是时间离散的。?即使是系统是时间连续的,因为计算机是基于时间和数值上都离散的数字技术的,实行计算机控制时必须将时间离散化后作为离散系统处理。 引言 ?因此,有必要讨论离散时间系统的最优控制问题。 ?离散时间系统仍然属于连续变量动态系统(CVDS)范畴。注意与离散事件动态系统(DEDS)的区别。 ? CVDS 与DEDS 是自动化领域的两大研究范畴,考虑不同的自动化问题。
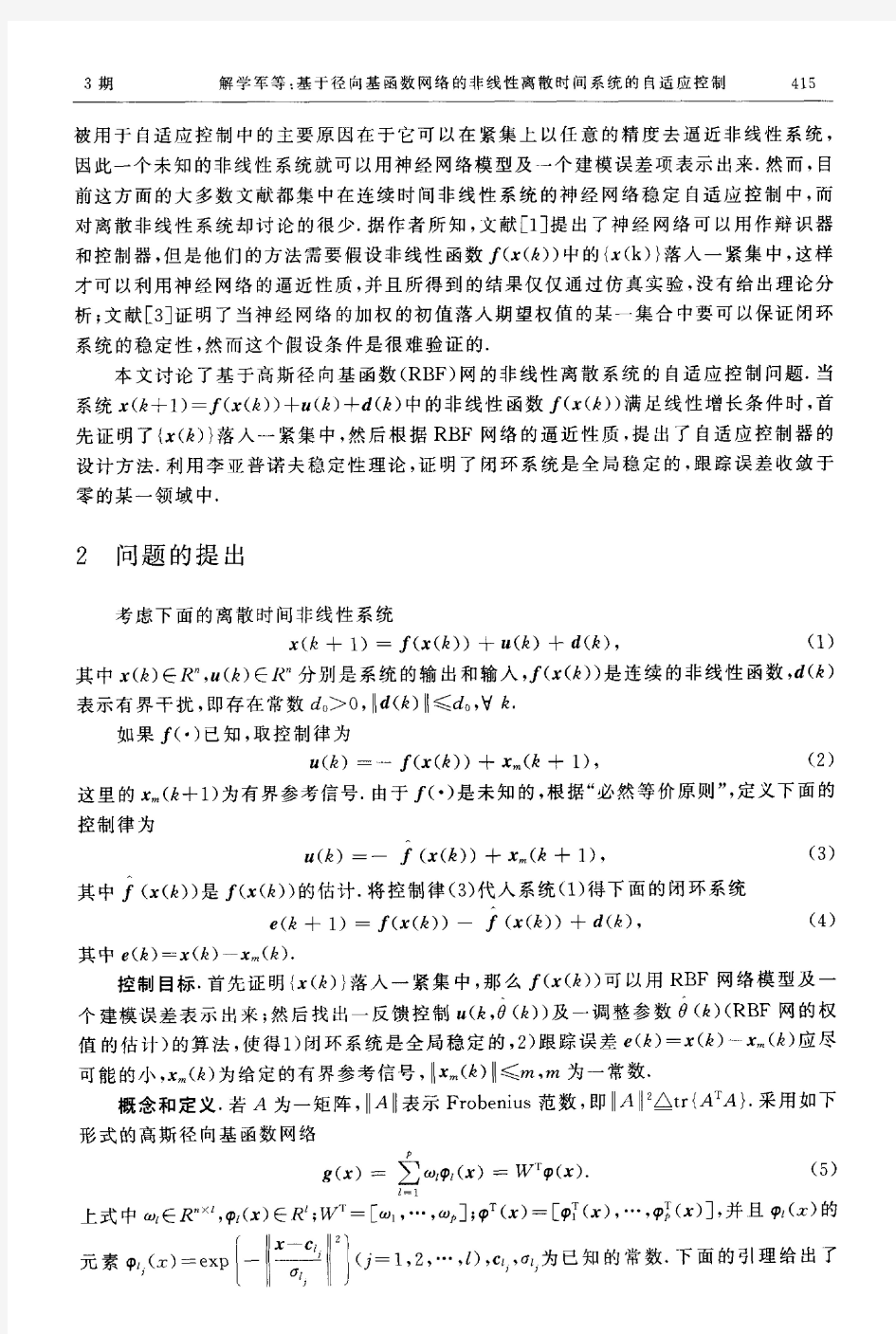
5.1 离散时间系统最优控制问题的提法 (1) 离散系统最优控制举例——多级萃取过程最优控制 ?萃取是指可被溶解的物质在两种互不相溶的溶剂之间的转移,一般用于将要提取的物质从不易分离的溶剂中转移到容易分离的溶剂中。 ?多级萃取是化工生产中提取某种价值高、含量低的物质的常用生产工艺。 萃取器萃取器萃取器萃取器V u (0)u (1)u (k -1)u (N -1) V V V V V V 含物质A 的混合物以流量V 进入萃取器1,混合物中A 浓度x (0); 萃取剂以流量u (0)通过萃取器1,单位体积萃取剂带走A 的量为z (0); 一般萃取过程的萃取物含量均较低,可认为通过萃取器1后混合物流量仍为V ; 流出萃取器1的混合物中A 物质的浓度为x (1)。以此类推至萃取器N 。 1 2 k N x (0) z (0)z (1) z (k-1) z (N -1) x (1) x (2) x (k -1) x (k ) x (N ) x (N -1) 多级萃取过程
(2) 离散系统最优控制问题的提法 给定离散系统状态方程(5-1-6)和初始状态 (5-1-7) 其中分别为状态向量和控制向量,f 为连续可微的n 维 函数向量。考虑性能指标 1 ,,1,0],),(),([)1( N k k k u k x f k x 0 )0(x x m n R k u R k x )(,)( 1 N 其中Φ、L 连续可微。 ?离散系统的最优控制问题就是确定最优控制序列u *(0),u *(1),…,u *(N -1),使性能指标J 达到极小(或极大)值。 ? 将最优控制序列u *(0),u *(1),…,u *(N -1)依次代入状态方程,并利用初始条件,可以解出最优状态序列x *(1),x *(2),…,x *(N ),也称为最优轨线。 (5-1-8) ] ),(),([]),([k k k u k x L N N x J
Matlab工具箱中的BP与RBF函数 Matlab神经网络工具箱中的函数非常丰富,给网络设置合适的属性,可以加快网络的学习速度,缩短网络的学习进程。限于篇幅,仅对本章所用到的函数进行介绍,其它的函数及其用法请读者参考联机文档和帮助。 1 BP与RBF网络创建函数 在Matlab工具箱中有如表1所示的创建网络的函数,作为示例,这里只介绍函数newff、newcf、newrb和newrbe。 表 1 神经网络创建函数 (1) newff函数 功能:创建一个前馈BP神经网络。 调用格式:net = newff(PR,[S1 S2...S Nl],{TF1 TF2...TF Nl},BTF,BLF,PF) 参数说明: ?PR - R个输入的最小、最大值构成的R×2矩阵; ?S i–S NI层网络第i层的神经元个数; ?TF i - 第i层的传递函数,可以是任意可导函数,默认为'tansig',可
设置为logsig,purelin等; ?BTF -反向传播网络训练函数,默认为'trainlm',可设置为trainbfg,trainrp,traingd等; ?BLF -反向传播权值、阈值学习函数,默认为'learngdm'; ?PF -功能函数,默认为'mse'; (2) newcf函数 功能:创建一个N层的层叠(cascade)BP网络 调用格式:net = newcf(Pr,[S1 S2...SNl],{TF1 TF2...TFNl},BTF,BLF,PF) 参数同函数newff。 (3) newrb函数 功能:创建一个径向基神经网络。径向基网络可以用来对一个函数进行逼近。newrb函数用来创建一个径向基网络,它可以是两参数网络,也可以是四参数网络。在网络的隐层添加神经元,直到网络满足指定的均方误差要求。 调用格式:net = newrb(P,T,GOAL,SPREAD) 参数说明: ?P:Q个输入向量构成的R×Q矩阵; ?T:Q个期望输出向量构成的S×Q矩阵; ?GOAL:均方误差要求,默认为0。 ?SPREAD:分散度参数,默认值为1。SPREAD越大,网络逼近的函数越平滑,但SPREAD取值过大将导致在逼近变化比较剧烈的函数时神经元过多,若SPREAD取值过小,则导致在逼近平滑函数时,
最优控制习题答案 1.设系统方程及初始条件为? ??=+-=)()() (2)()(1211t x t x t u t x t x &&,???==0)0(1)(21x t x 。约束 5.1)(≤t u 。若系统终态)(f t x 自由,利用连续系统极大值原理求)(*t u 性能指标,)3(2x J =取最小值。 解: 2.设一阶离散时间系统为)()()1(k u k x k x +=+,初值2)0(=x ,性 能指标为∑=+=20 2 2 )(21)2(k k u x J ,试用离散系统最小值原理求解最优控 制序列:)2(),1(),0(u u u ,使J 取极小值。 解: 3.软着落、空对空导弹的拦截问题、防空拦截问题。 解答: 4.设离散系统状态方程为)(2.00)(101.01)1(k u k x k x ?? ? ???+??????=+,已知边界条件?? ? ???=01)0(x ,??????=00)1(x 。试用离散系统最小值原理求最优控制序 列,使性能指标∑==1 02 )(03.0k k u J 取极小值,并求出最优的曲线序列。 解:属于控制无约束,N 不变,终端固定的离散最优控制问题,构造离 散 哈 密 尔 顿 函 数 )](2.0)()[1()](1.0)()[1()(03.0)(222112k u k x k k x k x k k u k H ++++++=λλ 其中)1(),1(21++k k λλ为给定拉个朗日乘子序列,由伴随方程:
)1()()(111+=??= k k x H k λλ,)1()1(1.0) ()(2122+++=??=k k k x H k λλλ得出 ?? ?+==+==) 2()2(1.0)1(),2()1() 1()1(1.0)0(),1()0(2121121211λλλλλλλλλλ, 由 极 值 条 件 ??? ????>=??=++=??0 06.0)(0)1(2.0)(06.0) (22 2k u H k k u k u H λ极小)1(310)(2+-=k k u λ可使min )(=k H ,令k=0和k=1的?? ??? -=-=) 2(310 )1(*)1(310)0(*22λλu u ,)(k u 带入状态方程并令k=0和1得到: 5.求 泛 函 dt x x x x J ?++=1 02 221211],[&&满足边界条件 π===-=)3(,0)0(,0)3(,3)0(2211x x x x 和约束条件36221=+t x 的 极值曲线。 解:应用拉格朗日乘子法,新目标函数为: dt t x t x x J )36)((1[2 21 1 022211-++++=?λ&&,令哈密尔顿函数为: )36(12 212221-++++=t x x x H λ&&,可以得到无约束条件新的泛函1 J 的欧拉方程为0)1(2)(22 211 1111=++-=??-??x x x dt d x x H dt d x H &&&&λ (1)
§ 7.4 动态规划与离散系统最优控制 1. 动态规划基本原理 最优性原则应有如此性质: 即无论(整个过程的)初始状态和初始决策如何,其余(后段)各决策对于由第一个决策(后)所形成的状态作为(后段)初始状态来说,必须也是一个最优策略。 A B C D E 最优性原则 图7.5
用式表示 1() ()min{(,())(())},1,2,,n n n n n u x J x R x u x J u x n N -=+= 阶段变量n (分析次序) 状态变量x 决策变量()n u x 决策组11{,, ,}n n u u u - 损失(效益)函数:(,)n R x u 对x 用决策n u 所付代价(效益) 后部最优策略函数()n J x 由x 至终最小损失(最大效益)
A 到D 的最短路线 解 3阶段的决策过程, 在CD 段(首), (分析)阶段变量1n =; 7.6 图A 2C 1 B D 2 B 3 B 1 C 3 C 4 5 55 6 3 3) b (A 2 C 1B D 2 B 3 B 1 C 3 C 4 4 5 55 55 66677 7 3 3 (a) 3 =n 1 =n 2 =n
111111*********()(,)3,();()(,)5,();()(,)3,(). J C R C D u C D J C R C D u C D J C R C D u C D ========= 在BC 段(首), (分析)阶段变量2n =; 21111,2,3 ()min{(,)()} min{73,65,53}8i i i J B R B C J C ==+=+++=,213()u B C =; 22211,2,3 ()min{(,)()} min{63,55,73}9i i i J B R B C J C ==+=+++=,221()u B C =; 23311,2,3 ()min{(,)()} min{53,65,73}8 i i i J B R B C J C ==+=+++=,231()u B C =;
第二讲:离散时间的最优化问题 一、对库恩-塔克条件的进一步说明 上一次讲的库恩塔克条件中的互为松弛条件是 0)]([2,1=-x x g a λ (15) 不等式约束实际上包括两种情况,一种是等式成立,另一种是不等式成立 对前一种情况,即在(15)式约束中,如果约束条件中的等号成立,则库恩塔克条件自然满足,即库恩塔克条件等价于用拉格朗日乘数法获得的最优化的一阶条件。 对后一种情况来说,如果约束条件中的等式不成立,则最优解必在区间内。这时,带有不等式约束的最优解与无约束解是一样的。根据最优化解的必要条件,则一阶偏导数必为零,即: 01 1=x g x f ??=??λ (11)’ 且 02 2=x g x f ??=??λ 根据隐函数存在定理的要求, 1x g ??和2x g ??不能同时为零。在经济学中,该条件一般是成立的,例如,消费者预算约束C bx ax x x g <+=2121),(, C>0, 而a, b 一般不会同时为0,所以,1x g ??和2 x g ??不同时为0, 则必有0=λ。 所以,无论那种情况,库恩塔克条件都成立。 二、动态最优化问题 与静态最优化不同,动态最优化是指在一个随时间变化的过程中,选择一条随时间变化的路径,当变量沿着该路径变化时,目标函数达到最大值。因此,动态最优化问题与静态最优化问题的不同之处,主要在于静态最优化问题的解是一个点,于时间无关,而动态最优化问题的解是一条依赖于时间的路径,实际上是
一条曲线。一般来说,这类问题可以分两种情形讨论。第一种情形是时间是离散的,即将一段时间划分为几个不同的区间,有限个或无限个区间都可以。第二种情况是时间是连续的,要求一段时间的任意时刻目标函数达到最优解。 对于离散时间的最优化问题,一般来说,常用的方法有两种,一种是直接建立拉格朗日函数,用拉格朗日乘数法求解。另一种是建立一个贝尔曼(Bellman )方程,将最优化问题变成一个两期问题求解。 对于连续时间的最优化问题,常用的方法也有两种,一种是变分法,是利用泛函分析的方法,把时间路径看成泛函问题的最优解。另一种方法是汉尔米顿(Hamilton )法,事实上是拉格朗日乘数法的推广和变种。本节将首先讨论一下离散时间的最优化问题,而将连续时间的最优化问题留给下一讲。 下面,结合某些具体经济问题,理解离散最优化方法的思想和具体步骤。 三、离散时间最优化问题的两种解法(以消费资产定价模型为例) 1. 现代生命周期理论问题的提出 现代生命周期理论是有莫迪利安尼(1963)在50年代和60年代首先创立的,其最最初形式是确定性、非随机的。后来,在理性预期学派的影响下,大约在1978年,由霍尔(Robert. Hall )成功地给出了生命周期函数的现代形式,即随机的生命周期函数。该理论解决了现时消费与未来消费或储蓄之间、同一时期不同类型储蓄资产之间的配置关系。为说明现代生命周期理论,做如下假设: 1) 消费者的偏好可以写成: U t =E t {f(q 1, q 1,…,q t , …, q T )} 其中,U t 是t 时期的效用,E t 是在t 时期利用了所有可得到的信息的(理性)预期算子,q 1, q 1,…,q t , …, q T 是从时刻1到T 的消费品向量,f(?)是一个对各自变量均非递减的凹函数。该函数计算的效用是在确定性条件下从消费向量得到的,它代表了消费者一生中的消费效用,下标表示年龄的大小,1表示出生日,T 表示死亡日。因为决策是在面对未来的不确定情况下做出的,所以,用预期算子表示消费者目标是期望效用最大化。 2) 为了简单起见,设效用函数满足时际可加性条件,即U t 可以写成: U t =E t ∑=T t r V t (q t ) 由于效用函数是时际可分离的,所以一生效用极大化的含义可简化成两个问
基于径向基函数神经网络的函数逼近 刘君尧1,邱 岚2 (1.深圳信息职业技术学院,广东深圳 518029;2.中国移动广西公司,广西南宁 530022) 【摘 要】在介绍了径向基函数神经网络原理的基础上,应用该网络进行函数逼近的实现,并探讨散步常数的选取对逼近效果的影响。 【关键词】径向基函数;神经网络;散布常数;函数逼近 【中图分类号】TP183 【文献标识码】A 【文章编号】1008-1151(2009)09-0039-01 (一)引言 径向基函数(Radial Basis Function)神经网络是由 J.Moody和C.Darken于20世纪 80年代末提出的一种神经网 络,径向基函数方法在某种程度上利用了多维空间中传统的 严格插值法的研究成果。在神经网络的背景下,隐藏单元提 供一个“函数”集,该函数集在输入模式向量扩展至隐层空 间时为其构建一个任意的“基”,这个函数集中的函数就被称 为径向基函数。目前,径向基函数多用于函数逼近和分类问 题的研究。 (二)RBF神经网络模型 最基本的径向基函数神经网络包含三层,由一些感知单 元组成的输入层、包含一个具有径向基函数神经元的隐层和 一个具有线性神经原的输出层。 1.RBF径向基神经元模型 径向基函数神经元的传递函数有多种形式,最常用的形 式是高斯函数(radbas)。采用高斯基函数,具备如下优点: ①表示形式简单,即使对于多变量输入也不增加太多的复杂 性;②径向对称;③光滑性好,任意阶导数存在;④由于该 基函数表示简单且解析性好,因而便于进行理论分析。 输入向量p 图1径向基传递函数 径向基网络的神经元模型结构如图2所示。由该图可见, radbas的输入为输入矢量p和权值向量W之间的距离乘以阈 值b。 图2 径向基函数神经元模型 2.RBF神经网络的结构 径向基函数网络包括输入层、隐层和输出层,如图3所 示。输入信号传递到隐层,隐层有S1个神经元,节点函数为 高斯函数;输出层有S2个神经元,节点函数一般采用简单的 线性函数。 图3 径向基函数网络基本结构图 (三)RBF神经网络应用于函数逼近 RBF神经网络在进行函数逼近的实现时,往往在网络设计 之初并不指定隐层神经元的个数,而是在每一次针对样本集 的训练中产生一个径向基神经元,并尽可能最大程度地降低 误差,如果未达到精度要求,则继续增加神经元,直到满足 精度要求或者达到最大神经元数目。这样避免了设计之初存 在隐层神经元过少或者过多的问题。训练过程中,散布常数 的选取非常重要。 1.函数逼近的RBF神经网络 已知输入向量P和输出向量T,通过构建径向基函数神经 网络来进行曲线拟合,从而找到一个函数能够满足这21个数 据点的输入/输出关系,绘制训练样本如图所示。 输入向量P:-1:0.1:1; 输出向量T:0.9500 0.5700 0.0300 -0.2800 -0.5800 -0.6200 -0.4800 -0.1400 0.2100 0.4700 0.5000 0.3800 0.1700 -0.1200 -0.3200 -0.4200 0.3500 -0.1300 0.2120 0.4200 0.5100; 应用MATLAB神经网络工具箱中的newrb()函数快速构建 一个径向基函数网络,并且网络根据输入向量和期望值自动 进行调整,从而实现函数逼近,预先设定均方差精度为0.0001, 散布常数为1。实验结果如图4所示。可见,应用径向基函数 进行函数逼近非常有效。 图4网络输出与目标值比较(下转第19页)【收稿日期】2009-06-02 【作者简介】刘君尧(1979-),女,湖南汨罗人,深圳信息职业技术学院讲师,硕士研究生,研究方向为神经网络。
最优控制问题求解方法综述 学院:信息科学与工程学院 专业班级: 学号: 姓名: 指导老师: 2013年4月27日
最优控制问题求解方法综述 摘要:最优控制理论是研究和解决从一切可能的控制方案中寻找最优解的一门学科。本文阐述了最优控制问题的基本概念,解决最优控制问题的主要方法有古典变分法、极小值原理和动态规划法。本文着重讲解各种方法的特点,适用范围,可求解问题的种类以及各方法之间的联系等。 关键字:最优控制;变分法;极小值原理;动态规划 1、最优控制问题基本介绍 最优控制理论是现代控制理论的核心,控制理论的发展来源于控制对象的要求。随着社会科技的不断进步,最优控制理论的应用领域十分广泛,如时间最短、能耗最小、线性二次型指标最优、跟踪问题、调节问题和伺服机构问题等。 所谓最优控制,就是寻找一个最优控制方案或最优控制律,使所研究的对象(或系统)能最优地达到预期的目标。最优控制研究的主要问题就是根据建立的被控对象的数学模型,选择一个容许的控制律,使得被控对象按预定要求运行,并使给定的某一性能指标达到极小值(或极大值)。在现实动态系统中,动态最优问题的目标函数是一个泛函,求解动态最优问题常用的方法有经典变分法,极小值原理,动态规划和线性二次型最优控制法等。 对于动态系统,当控制无约束时,采用经典微分法或经典变分法;当控制有约束是,采用极值原理或者动态规划;如果是线性的,性能指标是二次型形式的,则可采用线性二次型最优控制问题求解。 2、最优控制的求解方法 2.1变分法 变分法是求解泛函极值的一种经典方法,也是解决最优控制问题的本质方法,是研究最优控制问题的一种重要工具。掌握变分法的基本原理,还有助于理解以最小值原理和动态规划等最优控制理论的思想和内容。 对于没有对泛函的极值函数附加任何条件的求解方法,即无约束条件下的求解方法,我们可以利用欧拉方程求解,在一般性情况下,我们可以利用一下步骤求解:
/系统的数学模型,物理约束条件及性能指标。数学描述:设被控对象的状态方程及初始条件为 ()[(),(),],(0)0x t f x t u t t x t x == ;其中,()x t X Rn ∈?为状态向量,X 为状态向量的可容许集;()u t Rm ∈Ω?为控制向量,Ω为控制向量的可容许集。试确定容许的最优控制*()u t 和最优状态轨迹*()x t ,使得系统实现从初始状态(0)x t 到目标集[(),]0x tf tf ψ=的转移,同时使得性能指标0 [(),][(),(),]tf t J x tf tf L x t u t t dt ?=+ ? 达到极值。 系统状态方程形式(连续,离散)(2)最优控制形式(开环,闭环) (3)实际应用(时间,燃料,能量,终端 ) (4)终端条件(固定,自由) (5)被控对象形目标函数及约束条件组成的静态优化问题可以描述为:在满足一系列约束条件的可行域中,确定一组优化变量,(极大值或极小值)。 数学描述:min (),,:n n f x x R f R R ∈→,..()0,:;()0,:n m n l s t g x g R R h x h R R =→≥→ 静态最优化问题 ,也称为参数最优化问题,它的三个基本要素是优化变量、目标函数和约束条件,其本质是解决函数,也称为最优控制问题,它的三个基本要素是被控对象数学模型、物理约束条件和性能指标,其本质是解 多变量目标函数沿着初始搜索点的负梯度方向搜索,函数值下降最快,又称最速下降法;(2)多变量无约束。 根据具体的最优换问题构造合适的惩罚函数,将多变量有约束最优化问题转换为一系列多变量无约束最优化问题,从而采用合适 ;(2)多变量有约束(外点法:等式约,不等式约束;内点法:不等式约束)。 通过构造拉格朗日函数,将原多变量有约束最优化问题转化为一个多变量无约束最优化问题,从而采用合适的无约束方法继(等式约束,不等式约束)。 梯度定义12()()()()f x x f x f x f x x x ??? ??????=?=?????? ???,Hessian 矩阵2222 1212 22 2212()()f f x x x f x H x x f f x x x ?? ?????????? == ?? ???????????? ,最优梯度法(无约束):迭代(1)()()()()k k k k x x f x α+=-?,()()() ()()()()() ()()() k T k k k T k k f x f x f x H x f x α ??=??,终止误差()()()k p k f x ε=-?≤ 例:(),(0),()f x f x H x ??;(0)[(0)(0)]f x T f x α=???/[(0)( 0)]T f x H f x ????;(1)(0)(0)(0)x x f x α=-??;()f xk ε?<,()x k 是极()0,()0x x =≥g h (1) 等式约束:(,)()()T H x f x x λ=+λg ,利用 1210,0,0,0,0n m H H H H H x x x λλ?????=====?????解出极大值点或极小值点。 (2) 不等式约束:()0x ≤h ,引入附加变量2i v 使得不等式约束变为等式约束:2()0i i h x v +=,再有等式拉格朗日乘子法. (1)外部:1)等式约束21112 2 (,)()()()()()m T i i P x f x g x f x g x g x ρρρ==+=+∑ ,用/0P x ??=求解出*()x ρ,令ρ→+∞求出*x ; 2)不等式约束()0x ≥h :211(,)(){min[(),0]}l i i P x f x h x ρρ==+∑ 3) 复合形式:2 1 122 (,)()()(){min[(),0]}T i P x f x x x h x ρρρ=++∑g g (2)内部:只适用于不等式约束,惩罚函数11(,)()()l i i P x f x h x μμ-==+∑,21 (,)()()l i i P x f x h x μμ-==+∑ ,1(,)()ln[()]l i i P x f x h x μμ==-∑利用 0P x ?=?求解出*()x μ,令0μ+→求出*x C3(变分法) 0(,)()|J x x J x x α δαδα=?=+?,变分规则:1100t t t t Jdt Jdt δδ=??,d x x dt δδ= 欧拉方程****(,,)(,,)[][]0g x x t d g x x t dt ??-=??x x ,横截条件方程****** *(,,)(,,)[ ]|(,,)[]|0f f T T t f t f g x x t g x x t x g x x t t δδ????+-=???? x x x
第一章 最优控制问题 最优控制理论是现代控制理论中最早发展起来的分支之一. 所谓控制就是人们用某种方法和手段去影响事件及其运动的进程和轨道,使之朝着有利于控制主体的方向发展. 对于一个给定的受控系统,常常要求找到这样的控制函数,使得在它的作用下,系统从一个状态转移到为设计者希望的另一个状态,且使得系统的某种性能尽可能好. 通常称这种控制问题为最优控制问题. 最优控制理论主要讨论求解最优控制问题的方法和理论,包括最优控制的存在性和唯一性和最优控制应满足的必要条件等. 最优控制理论始于20世纪50年代末,其主要标志是前苏联数学家庞特里亚金(L.C.Pontryagin )等人提出的“最大值原理”. 最优控制理论在工矿企业、交通运输、电力工业、国防工业和国民经济管理等部门有着广泛的应用. 本章我们通过几个具体实例介绍最优控制的基本问题和基本概念及其最优控制问题的数学描述. 第一节 最优控制实例 下面列举几个简单但具有实际应用的例子,他们虽然来自完全不同的领域,但却反映了一个共同的问题-最优控制问题 例1 快速到达问题 考虑一个机构(如车皮)W ,其质量为m ,沿着水平的轨道运动,不考虑空气的 阻力和地面对车皮的摩擦力,把车皮看成一个沿着直线运动的质点,x(t)表示车 皮在t 时刻的位置,u(t)是施加在车皮上的外部控制力,假定车皮的初始位置和 速度分别为00)0(,)0(y x x x == ,我u(t)使车皮在最 短时间内到达并静止在坐标原点,即到达坐标原点时速度为零. 根据牛顿第二定律 0),(>=t t u x m , (1.1) 令211,x x x x == ,则(1.1)化为 ),(,221t u x m x x == (1.2) 其中)(),(21t x t x 分别表示车皮在t 时刻的位置和速度,写成向量形式
4 ·技术?/? TECHNOLOGY ·科研信息化技术与应用2012, 3(5): 4–12 径向基函数在动网格中的应用及可并行性研究 马文鹏,陆忠华,胡晓东 中国科学院计算机网络信息中心 超级计算中心,北京 100190摘 要: 关键词: Applications of Radial Basis Functions in Dynamic Mesh and Its Parallelizability Ma Wenpeng, Lu Zhonghua, Hu Xiaodong Supercomputing Center, Computer Network Information Center , Chinese Academy of Sciences , Beijing 100190, China Abstract: 径向基函数广泛应用于网格变形、气动外形优化设计、网格优化等领域。近年来,基于径向基函数的动网格技术得到了深入的研究和广泛的应用。本文结合计算流体力学和高性能计算的应用背景,从径向基函数对网格的变形质量和变形效率进行了总结和进一步研究:在网格变形方面,重点对比了不同基函数对同一网格运动变形能力和同一基函数对不同网格运动的适应能力;在网格变形效率方面,分析了算法在计算和存储的瓶颈所在,考虑了? OpenMP 和?GPU 这两种共享内存的加速方式,得到较好加速比。最后,分析了当网格规模增大时,动网格在分布式计算和存储模型?(MPI) 下的处理方法。 径向基函数;径向函数;动网格;网格变形;并行 Radial basis functions are widely used for mesh deformation, aerodynamic shape optimization, grid optimization, etc. Recently, dynamic mesh techniques based on radial basis functions are widely used and much more attention is paid to them. This paper summaries the quality and efficiency of mesh deformation with the applications of radial basis functions on both CFD (Computational Fluid Dynamics) and HPC (High Performance Computing). In addition, a further research is conducted on the following two aspects: the abilities to satisfy the same mesh motion among different radial basis functions and the abilities to satisfy different mesh motion using one radial basis function; computation and storage bottleneck are analyzed and then parallel solutions based on shared memory models including OpenMP and GPU are considered 基金项目:国家高技术研究发展计划 (863 计划) (2012AA01A304);国家自然科学基金 (91130019)
BP 算法及径向基函数网络 B0503194班 高翔 1050319110 杨柳青 1050319113 题目1: 2.5 利用BP 算法及Sigmoid 算法,研究以下各函数的逼近问题: (1) 1 () , 1x 100f x x = ≤≤ (2) 10()log x , 1x 10f x =≤≤ (3) ()exp() , 1x 10f x x =-≤≤ (4) ()sin , 1x 2 f x x π =≤≤ 解:该题可以采用BP 神经网络或者是径向基函数网络来解决,首先给出我们利用BP 网络的解决方法,关于如何利用径向基函数网络来解决问题,放在2.6 题中的通过径向基函数网络解决XOR 问题一起讨论。 一、 概述 人工神经网络作为一门20世纪中叶起步的新技术,随着其理论的逐步完善,其应用日益广泛,应用领域也在不断拓展,已经在各个工程领域里得到了广泛的应用。通常神经网络技术主要应用在以下方面。 模式信息处理和模式识别。 最优化问题计算。 信息的智能化处理。 复杂控制。 信号处理。 在1959年,当时的两位美国工程师B.Widrow 和M.Hoff 提出了自适应线形元件。在 1969年,人工智能的创始人之一M.Minsky 和S.Papert 指出单层感知器只能够进行线形分类,对线形不可分的输入模式,哪怕是简单的异或逻辑运算,单层感知器也无能为力,而解决其的唯一方法就是设计训练出具有隐含层的多层神经网络。这一难题在1986年得到了解决。 1986年,D.E. Rumelhart 等人提出解决多层神经网络权值修正的算法——误差反向传播法(Error Back-Propagation )。这种算法也通常被应用在BP (Back-Propagation Network )中。 在目前,在人工神经网络的实际应用中,绝大部分的神经网络模型(80%--90%)是采
径向基函数 利用样本点x i的响应值, 通过基函数的线性叠加来计算待测点x 处响应值的径向基模型的基本形式如下: f x=w i??r i n i=1 =w Tφ 其中权系数w=w1,w2,···,w n T,φ= ?r1,?r2,···,?r n T r i= x?x i是待测点x与样本点x i之间的欧氏距离 ?r是径向函数 常用的径向函数有Gauss函数?r=exp ?r 2 c2 Multiquadric函数?r=r2+c21 2,c是给定大于零的常数 根据插值条件f x j=y i j=1,···,n,可得方程组 ??w=Y 矩阵?= ?ij= ? x i?x j 向量Y=y1,?,y n T i,j=1,?,n 在样本点不重合且函数?为征订函数,上式存在唯一解 w=??1?Y
附:MATLAB程序 %求解RBF方程的系数 function b=RBFMain() clc; clear; %读取插值点的数据 Num=xlsread('set_of_test.xlsx'); [row,line]=size(Num); %读取插值点的结果 F=xlsread('result_of_weight.xlsx'); %计算r值 r=eye(row); for i=1:row for j=1:row temp=0; for k=1:line temp=temp+(Num(i,k)-Num(j,k))^2; end r(i,j)= sqrt(temp+1); end end %求解方程系数 b=r\F; %写入excel xlswrite('set_of_coefficient.xlsx',b); end %RBF径向基函数主程序 function result=RBFMain2() clear;clc; %插值点 Input=xlsread('set_of_test.xlsx'); [row,line]=size(Input); %需要预测的一组插值点 X=xlsread('set_of_indict.xlsx'); %读取系数 b=xlsread('set_of_coefficient.xlsx'); %计算r值 r=[]; for i=1:row temp=0;
Vol.36,No.1ACTA AUTOMATICA SINICA January,2010 An Optimal Control Scheme for a Class of Discrete-time Nonlinear Systems with Time Delays Using Adaptive Dynamic Programming WEI Qing-Lai1ZHANG Hua-Guang2LIU De-Rong1ZHAO Yan3 Abstract In this paper,an optimal control scheme for a class of nonlinear systems with time delays in both state and control variables with respect to a quadratic performance index function is proposed using a new iterative adaptive dynamic programming (ADP)algorithm.By introducing a delay matrix function,the explicit expression of the optimal control is obtained using the dynamic programming theory and the optimal control can iteratively be obtained using the adaptive critic technique.Convergence analysis is presented to prove that the performance index function can reach the optimum by the proposed method.Neural networks are used to approximate the performance index function,compute the optimal control policy,solve delay matrix function,and model the nonlinear system,respectively,for facilitating the implementation of the iterative ADP algorithm.Two examples are given to demonstrate the validity of the proposed optimal control scheme. Key words Adaptive dynamic programming(ADP),approximate dynamic programming,time delay,optimal control,nonlinear system,neural networks DOI10.3724/SP.J.1004.2010.00121 The optimal control problem of nonlinear systems has always been a key focus in the control?eld in the last several decades.Coupled with this is the fact that noth-ing can happen instantaneously,as is so often presumed in many mathematical models.So strictly speaking,time delays exist in the most practical control systems.Time delays may result in degradation in the control e?ciency even instability of the control systems.So there have been many studies on the control systems with time delay in various research?elds,such as electrical,chemical engineer-ing,and networked control[1?2].The optimal control prob-lem for the time-delay systems always attracts considerable attention of the researchers and many results have been obtained[3?5].In general,the optimal control for the time-delay systems is an in?nite-dimensional control problem[3], which is very di?cult to solve.So many analysis and appli-cations are limited to a very simple case:the linear systems with only state delays[6].For nonlinear case with state de-lays,the traditional method is to adopt fuzzy method and robust method,which transforms the nonlinear time-delay systems to linear systems[7].For systems with time delays both in states and controls,it is still an open problem[4?5]. The main di?culty lies in the formulation of the optimal controller which must use the information of the delayed control term so as to obtain an e?cient control.This makes the analysis of the system much more di?cult,and there is no method strictly facing this problem even in the linear cases.This motivates our research. Adaptive dynamic programming(ADP)is a powerful tool in solving optimal control problems[8?9]and has at-tached considerable attention from many researchers in re-cent years,such as[10?16].However,most of the results focus on the optimal control problems without delays.To Manuscript received September5,2008;accepted March3,2009 Supported by National High Technology Research and Development Program of China(863Program)(2006AA04Z183),National Nat-ural Science Foundation of China(60621001,60534010,60572070, 60774048,60728307),and the Program for Changjiang Scholars and Innovative Research Groups of China(60728307,4031002) 1.Key Laboratory of Complex Systems and Intelligence Sci-ence,Institute of Automation,Chinese Academy of Sciences,Beijing 100190,P.R.China 2.School of Information Science and Engi-neering,Northeastern University,Shenyang110004,P.R.China 3. Department of Automatic Control Engineering,Shenyang Institute of Engineering,Shenyang110136,P.R.China the best of our knowledge,there are no results discussing how to use ADP to solve the time-delay optimal control problems.In this paper,the time-delay optimal control problem is solved by the iterative ADP algorithm for the ?rst time.By introducing a delay matrix function,the explicit expression of the optimal control function is ob-tained.The optimal control can iteratively be obtained us-ing the proposed iterative ADP algorithm which avoids the in?nite-dimensional computation.Also,it is proved that the performance index function converges to the optimum using the proposed iterative ADP algorithm. This paper is organized as follows.Section1presents the preliminaries.In Section2,the time-delay optimal control scheme is proposed based on iterative ADP algorithm.In Section3,the neural network implementation for the con-trol scheme is discussed.In Section4,two examples are given to demonstrate the e?ectiveness of the proposed con-trol scheme.The conclusion is drawn in Section5. 1Preliminaries Basically,we consider the following discrete-time a?ne nonlinear system with time delays in state and control vari-ables as follows: x(k+1)=f(x(k),x(k?σ))+g0(x(k),x(k?σ))u(k)+ g1(x(k),x(k?σ))u(k?τ)(1) with the initial condition given by x(s)=φ(s),s=?σ,?σ+1,···,0,where x(k)∈R n is the state vector, f:R n×R n→R n and g0,g1:R n×R n→R n×m are dif-ferentiable functions and the control u(k)∈R m.The state and control delaysσandτare both nonnegative integral numbers.Assume that f(x(k),x(k?σ))+g0(x(k),x(k?σ))u(k)+g1(x(k),x(k?σ))u(k?τ)is Lipschitz continuous on a set?in R n containing the origin,and that system(1) is controllable in the sense that there exists a bounded con-trol on?that asymptotically stabilizes the system.In this paper,how to design an optimal state feedback controller for this class of delayed discrete-time systems is mainly dis-cussed.Therefore,it is desired to?nd the optimal control u(x)satisfying u(x(k))=u(k)to minimize the generalized performance functional as follows: