
闭环式管理:从战略到运营 作者:罗伯特·卡普兰(Robert S. Kaplan)、戴维·诺顿(David P. Norton)平衡计分卡创始人罗伯特·卡普兰和戴维·诺顿建立了一个闭环式的管理体系,将战略和运营结合起来,并为每个阶段提供了各种工具。 康纳公司(化名)日前成功上市,不过上市后不久它就开始迷失方向。虽然公司高管还是照例每月抽出一天的时间召开管理层会议,但会议的重点已悄然发生了变化。 根据管理层会议的日程,与会人员在上午讨论运营问题,下午讨论战略问题。但由于公司上市之后完成季度业绩目标的压力加大,运营问题开始挤占战略问题的讨论时间。糟糕的是,公司每次审核月度实际业绩和季度预测业绩,都发现收入低于预期,费用却高于预期。管理人员对此忧心忡忡,于是他们花大量的时间讨论,希望通过定价策略、精简产能、裁减行政事务人员和促销活动来缩短业绩差距。一位高管指出:“我们根本没时间讨论战略。要是达不到季度业绩目标,公司可能就无法生存。对我们来说,长期问题就是短期问题。” 像康纳公司这样的例子不胜枚举,包括一些老牌上市公司也都发现在它们的管理层会议中,货币学上“劣币驱逐良币”的格雷欣法则(Gresham's Law)(编者注:这一法则由托马斯·格雷欣爵士(Sir Thomas Gresham)于1558年首次提出,他认为:当公众对货币供给的某一部分怀有疑虑时,他们会将“良币”(good money)窖藏起来,并试图将“劣币”(bad money)转让给他人。)同样适用:人们对糟糕运营状况的讨论,必然会挤掉对战略成功实施的讨论。当公司陷入这一误区时,它们很快就会发现自己行进困难。它们疲于应付每季度的指标,而不去研究如何调整战略,才能创造出更好的增长机遇。公司的短期业绩总是差一截,它们也不去打破这种怪圈。于是,分析师、投资者和董事们开始质疑公司管理层对业务发展的规划和承诺。 然而,以我们的经验来看,公司业绩低于预期的原因并不是管理人员能力不足或不够努力,而是公司管理体系的崩溃。所谓“管理体系”,是指公司用于制定战略并将战略转化为具体运营措施的一整套综合流程和工具,它们还能帮助公司监督并提高战略和运营的成效。战略与运营之间普遍存在着失衡问题:过去25年的诸多研究表明,有60%到80%的公司制定的新战略没有达到预期目标。
闭环式管理:从战略到运营 作者:罗伯特·卡普兰(Robert S. Kaplan) 戴维·诺顿(David P. Norton) 来源:哈佛商业评论网 导读:管理者往往为了完成短期的业绩指标而忽略了对公司长期战略至关重要的事项。平衡计分卡创始人罗伯特?卡普兰和戴维?诺顿建议公司应该建立一个闭环式的管理体系,将战略与运营结合起来,这个闭环管理体系有五个阶段,它能帮助公司管理者同时管理好战略和运营。五个阶段如下图: 在很多公司,管理者陷入了这样一个误区:为了完成短期的业绩指标,他们花大量的时间讨论解决运营问题,因为不解决短期问题,公司就无法生存;然而,
因为时间有限,他们却忽略了对公司长期战略至关重要的事项。结果,这些公司的战略与运营脱钩,每个季度的实际业绩总是与预期目标相差那么一截。 平衡计分卡创始人罗伯特?卡普兰和戴维?诺顿认为,这些公司业绩低于预期的原因并不是管理人员能力不足或不够努力,而是公司管理体系的崩溃。所谓“管理体系”,是指公司用于制定战略并将战略转化为具体运营措施的一整套综合流程。两位作者提议公司建立一个闭环式的管理体系(closed-loop management system),将战略和运营更紧密地结合起来。他们还为这个管理体系的每个阶段提供了各种工具,其中既包括他们自己创建的战略图和平衡计分卡等工具,也有许多其他管理者开发的工具,从而为战略的有效执行做出了更全面的指南。这个循环往复的闭环系统由五个阶段组成。 第一阶段:制定战略—公司在制定战略前,首先要对公司的使命、愿景和价值观达成共识,树立正确的思维模式,接着要对公司自身的优势和劣势有清楚的认识,并仔细分析外部环境和竞争对手的情况,以寻求机遇、应对威胁(即SWOT 分析)。在摸清了公司内外的状况后,公司可选择是发挥现有竞争优势或内部能力(迈克尔?波特的低成本与差异化战略选择,资源基础型战略),还是选择寻求全新的竞争定位(蓝海战略、颠覆性战略)。 第二阶段:转化战略。一旦制定好战略,管理人员需要将战略转化为可以明确传达给所有部门和员工的目标和措施。本文两位作者始创的战略图和平衡计分卡在这一阶段非常有用。战略图将战略目标按主题划分,而平衡计分卡则将战略目标和绩效衡量指标紧密地联系在一起。在这一阶段,对于将用在实施一系列战略举措的资源,公司还要确定和审批,并为每个战略主题指派一名高管负责到底。 第三阶段:规划运营。在确定了战略目标、衡量指标和各项战略举措后,公司接下来会制订运营计划,列出为实现战略目标而将采取的一些行动。这一阶段从确定流程改进项目的优先顺序开始,然后是制订详细的销售计划、资源能力计划,以及运营和资本预算。公司在这个阶段可以运用的工具和流程非常多,如质量和流程管理、作业成本核算、资源能力规划,以及动态预算等。
实用文档 编号 航空航天大学 电气工程综合设计报告题目Buck电路闭环控制策略研究 学院自动化学院 专业电气工程及其自动化 指导教师毛玲 二〇一五年一月
Buck电路闭环控制策略研究 摘要 首先,本文对Buck电路的3种闭环控制策略进行了原理分析,比较,并对Buck主功率级电路进行了原理分析和建模,最后完成主电路的参数设计。 其次,本文详细阐述了V2控制工作原理,推导V2控制环的传递函数,并且建立小信号模型,对控制器进行优化设计。最后使用SABER2007对BUCK电路的V2控制电路进行了时域频域仿真。 关键词:Buck电路,V2控制
目录 摘要 (i) Abstract .................................................. 错误!未定义书签。第一章概述.......................................................... - 1 - 第二章 Buck变换器控制方法简介……………………………………………………… 2.1电压型控制………………………………………………………………………………. 2.2电流型控制……………………………………………………………………………… 2.3 V2控制…………………………………………………………………………………… 第三章 Buck变换器原理分析及建模……………………………………………………. 3.1 Buck 变换器传递函数…………………………………………………………………. 3.2Buck电路的边界条件……………………………………………………………………3.3主功率电路的参数设计……………………………………………………………….. 第四章 V2控制电路分析及设计……………………………………………………….. 4.1V2控制原理分析 4.2 V2控制的buck变换器小信号模型 4.3V2控制器优化设计 第五章电路仿真………………………………………………………………………… 5.1V2控制策略频域仿真 5.2时域仿真电路和仿真波形
储能逆变器的控制策略研究 发表时间:2018-05-30T10:13:41.427Z 来源:《电力设备》2018年第1期作者:杜学平 [导读] 摘要:目前我国经济发展十分快速,电力行业越来越普遍,随着分布式电源不断接入电网和微电网系统的发展,微电网对系统的运行稳定性及供电可靠性都提出了一定的要求。 (青岛科技大学自动化与电子工程学院山东青岛 266199) 摘要:目前我国经济发展十分快速,电力行业越来越普遍,随着分布式电源不断接入电网和微电网系统的发展,微电网对系统的运行稳定性及供电可靠性都提出了一定的要求。储能系统应运而生,储能系统可以存储过剩的电能,在发电能力较弱时再放出电能给负载供电,实现削峰填谷,完美解决新能源间歇性发电的问题。储能系统在微电网中发挥着非常重要的作用,而储能逆变器又是储能系统中的核心部分,因此储能逆变器的控制策略研究是非常有实用价值的。 关键词:储能;逆变器;控制策略;研究 1系统结构和基本原理 图1 系统结构简图 以电池为介质的储能系统主要由电池及其管理系统(风能、太阳能的储能系统)和能量转换系统(PCS)两个部分组成(如图1所示)。电池通过PCS与电网交换能量(或离网负载),根据实际需要储存或释放能量。作为电池与大电网之间接口的PCS,实际上是大功率的电力电子变流器,此处PCS特指储能逆变器(储能变流器)。 常见的储能逆变器分为单级型和多级型两种主要形式。单级型储能变流器的拓扑仅由一个AC/DC环节构成,其优点是结构简单、控制方法简便,逆变器损耗低,能量转换效率高。但是存在以下缺点:1)一个AC-DC不可以充分多路输出;2)电池电压的工作范围不能灵活控制;3)电池电压固定不能灵活分配。由于以上确定我们选择两多级型,我们选择两级,增加一级隔离DC-DC的控制,该级控制可以根据功率灵活的扩展DC-DC通道的数量和输出电压的大小(如图2所示)。 1.1 AC-DC部分介绍: AC-DC部分拓扑采用三电平,其中开关频率为20K,功率器件为:初步选定英飞凌的DF100R07W1H5FP_B3的IGBT模组。此部分效率可达到98%。在大功率PWM变流装置中,常采用三点式电路,这种电路也称为中点钳位型(Neutral Point Clamped)电路(如图3所示)。与两点式PWM相比,三点式PWM调制主要有以下优点,一是对于同样的基波与谐波要求而言,开关频率可以低得多,从而能够大幅度减少开关损耗;二是主功率器件断开时所承受的电压仅为直流侧电压的一半,因此这种电路应用在高电压大容量的产品上特别合适。在控制策略方面,在传统的PWM整流器双闭环控制的基础上,采用内模控制代替电流内环PI调节器,以提高系统的鲁棒性能、跟踪性能和动态响应能力。 图2 两级PCS框图图3 AC-DC主原理图 1.2 DC-DC部分介绍: DCDC部分拓扑采用CLLC准谐振开关技术,开关频率100K或者是更高频率,功率器件采用单管MOS并联组成(并联数量根据功率确定,具体原理框图见图4)。功率器件为:初步选定英飞凌的IRFP4668P6F。此部分效率可达到90%以上。隔离DC/DC部分采用CLLC谐振软开关技术,它应用谐振的原理,使开关器件中的电流(或电压)按照正弦或标准正弦规律变化。当电流通过零点时,使器件关断(或电压为零时,器件打开),从而减少开关损耗。它不仅可以解决硬开关变换器中的硬开关损耗问题、容性开通问题、感性关断问题并且还能解决二极管反向恢复问题,对于由于硬开关引起的EMI 等问题也有很好的改善。这种拓扑结构,电路结构简单,工作效率高,并在输入电压和负载变化范围很宽的情况下依旧具有良好的电压调节特性,不仅可以在原边实现开关管 ZVS,还可以使副边整流管实ZCS,且原副边管子的电压应力较低。 图4 DC-DC 原理框图 2、几种必要的控制模式 2.1并网模式到孤岛模式: 储能逆变器并网模式到离网模式的切换分为两种主动切换和被动切换。主动切换指人为的把储能逆变器离网;被动切换指因电网故障或者电压过低等原因,储能逆变器受到不良影响,把储能逆变器切离电网PW。主动切换情况下,电网电压幅值和频率等指标正常,此时模式切换策略较为简单,只需要提供一个与电网电压相同的量作为离网模式下储能逆变器控制策略的参考值,在断开开关的同时控制方式切换为VF,电压外环给定值为电网电压幅值和频率。被动切换情况下,电网电压幅值和频率等指标可能不正常,此时的控制策略需参考
编号 南京航空航天大学 电气工程综合设计报告题目Buck电路闭环控制策略研究 学生姓名班级学号成绩 张潼0311205 031120505 杨岚0311205 031120508 何晓微0311201 031120110 龚斌0311206 031120631 李博0311205 031020519 学院自动化学院 专业电气工程及其自动化 指导教师毛玲 二〇一五年一月
Buck电路闭环控制策略研究 摘要 首先,本文对Buck电路的3种闭环控制策略进行了原理分析,比较,并对Buck主功率级电路进行了原理分析和建模,最后完成主电路的参数设计。 其次,本文详细阐述了V2控制工作原理,推导V2控制环的传递函数,并且建立小信号模型,对控制器进行优化设计。最后使用SABER2007对BUCK电路的V2控制电路进行了时域频域仿真。 关键词:Buck电路,V2控制
目录 摘要 (i) Abstract ...................................................................................................... 错误!未定义书签。第一章概述......................................................................................................................... - 1 - 第二章Buck变换器控制方法简介……………………………………………………… 2.1电压型控制………………………………………………………………………………. 2.2电流型控制……………………………………………………………………………… 2.3 V2控制…………………………………………………………………………………… 第三章Buck变换器原理分析及建模……………………………………………………. 3.1 Buck 变换器传递函数…………………………………………………………………. 3.2Buck电路的边界条件……………………………………………………………………3.3主功率电路的参数设计……………………………………………………………….. 第四章V2控制电路分析及设计……………………………………………………….. 4.1V2控制原理分析 4.2 V2控制的buck变换器小信号模型 4.3V2控制器优化设计 第五章电路仿真………………………………………………………………………… 5.1V2控制策略频域仿真 5.2时域仿真电路和仿真波形
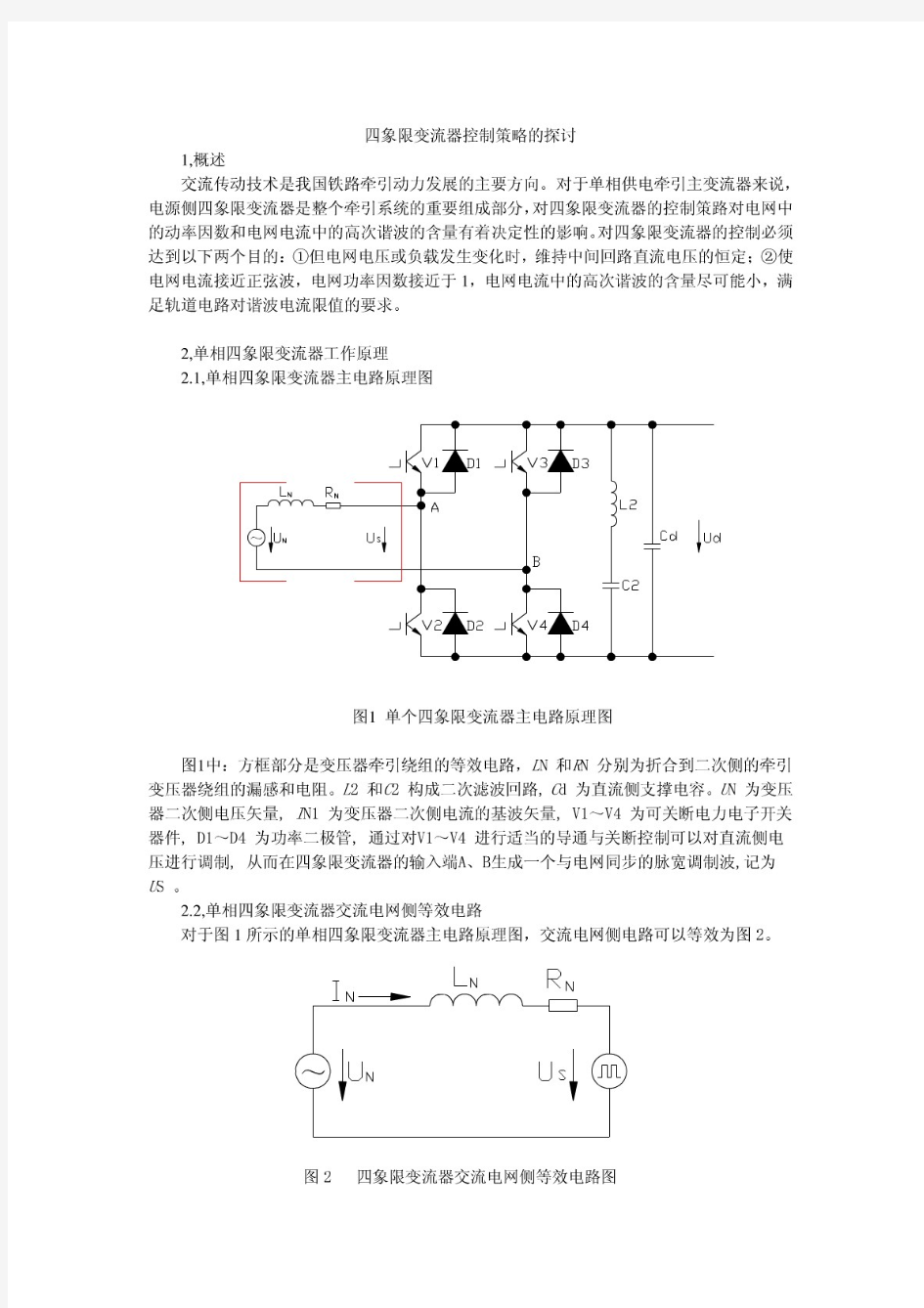
四象限变流器控制策略的探讨 1,概述 交流传动技术是我国铁路牵引动力发展的主要方向。对于单相供电牵引主变流器来说,电源侧四象限变流器是整个牵引系统的重要组成部分,对四象限变流器的控制策路对电网中的动率因数和电网电流中的高次谐波的含量有着决定性的影响。对四象限变流器的控制必须达到以下两个目的:①但电网电压或负载发生变化时,维持中间回路直流电压的恒定;②使电网电流接近正弦波,电网功率因数接近于1,电网电流中的高次谐波的含量尽可能小,满足轨道电路对谐波电流限值的要求。 2,单相四象限变流器工作原理 2.1,单相四象限变流器主电路原理图 图1 单个四象限变流器主电路原理图 图1中:方框部分是变压器牵引绕组的等效电路,L N 和R N 分别为折合到二次侧的牵引变压器绕组的漏感和电阻。L2 和C2 构成二次滤波回路, C d 为直流侧支撑电容。U N 为变压器二次侧电压矢量, I N1 为变压器二次侧电流的基波矢量, V1~V4 为可关断电力电子开关器件, D1~D4 为功率二极管, 通过对V1~V4 进行适当的导通与关断控制可以对直流侧电压进行调制, 从而在四象限变流器的输入端A、B生成一个与电网同步的脉宽调制波,记为 U S 。 2.2,单相四象限变流器交流电网侧等效电路 对于图1所示的单相四象限变流器主电路原理图,交流电网侧电路可以等效为图2。 图2 四象限变流器交流电网侧等效电路图
图2 四象限变流器交流电网侧等效电路图 2.3, 二次侧交流回路电压方程 由图2可以得到二次侧交流回路的矢量电压方程: U N= U s-I N R N-jωL N I N ⑴ 假设U N和U S之间的相位差为Ψ,在牵引工况下, U N和I N的相位差应为0°,则用该方程表示牵引工况的矢量如图3(a) 所示,此时U S滞后I N;而对于再生制动工况, U N和I N的相位差应为180°,该工况下的矢量如图3 (b) 所示,此时US超前U N。 (a) 牵引工况 (b) 再生工况 图3 四象限变流器控制矢量图 由方程(1) 和矢量图可知: 如果变压器二次侧电压U N和电感I N为已知量,那末只要控制了U S的幅值和相位,也就控制了I N的幅值和相位。反之,只要控制了I N的幅值和相位,也就控制了U S的幅值和相位,因此方程(1) 是实现四象限变流器控制的基本公式。通常采用的双闭环控制的原理就是由此而来,它是通过控制U S的幅值来调节I N的相位,保证交流侧电网的基波功率因数为1;而通过调节U S的相位来调节I N的幅值,保证直流侧电压U d的稳定。 3,单相四象限变流器控制策略 要使四象限变流器工作时达到单位功率因数,必须对电流进行控制,保证其为正弦且与电压同相或反相。根据有没有引入电流反馈可以将这些控制方法分为两种:没有引入交流电流反馈的称为间接电流控制,间接电流控制也称为相位幅值控制;引入交流电流反馈的称为直接电流控制。 3.1间接电流控制 ⑴间接电流控制工作原理 间接电流控制没有引入交流电流控制信号,而是通过控制四象限变流器的交流输入端电压,间接控制输入电流,故称间接电流控制。又因其直接控制量为电压,所以又称为相位幅值控制。间接电流控制具体的数学公式为: I N1=K p(U dg-U d)+1/T i∫(U dg-U d)dt I N2= I d I d /U N I N= I N1 + I N2
大功率四象限变流器微机实时控制原理 株洲电力机车研究所王挺泽 摘要:本文主要介召了大功率四象限变流器微机控制的基本原理及控制方法 关键词:四象限变流器、微机控制、原理、方法 前言 大功率四象限变流器微机实时控制原理是在AC4000原型车四象限变流器控制的基础上进行的。在此基础上,结合微机控制的优点,又进一步作了的完善,增加了功率因数角控制和具有改善直流电压动态调节性能的直流电流反馈环节。在控制的硬件上则采用了TMS320C31和80C196双CPU的方案,其中80C196负责:(1)与电网电压的同步控制、(2)充电接触器和短接充电接触器的控制、(3)与有关计算机的通迅、(4)功率因数角的探测、(5)跳弓的检测。而微处理器DSP320C31则负责:(1)电压、电流的采样、(2)电压、电流调节器的计算、(3)变压器直流磁化控制、(4)功率因数角的控制、(5)调制电压的计算、(6)PWM脉冲计算、(7)PWM脉冲输出控制。 1、四象限变流器主电路工作原理 如图1所示为交直交电力机车一个转向架带有两个网侧四象限变流器的主电路 图1 四象限变流器的主电路原理图
原理图。为了更好地说明四象限变流器的工作原理,下面对网侧只有一个四象限变流器回路进行分析。为了简化起见,变压器用一个等效电路表示,变压器的漏抗和内阻用一个电感和一个电阻表示。原理上四象限变流器的两对桥臂(包括两个GTO和两个二极管)可用转换开关代替。当网侧四象限变流器在中间回路直流电压U d大于u st峰值下运行时,4qs就作升压调压器工作。图2为用转换开关代替的网侧四象限变流器等效电路图。 图2 四象限变流器的等效电路原理图 4qs是一个脉冲整流器,因此按转换开关的位置,四象限变流器有以下几种工作方式: (1)、u st=0 :电能在电网与变压器漏抗之间交换能量,此时u L=u N,i d0=0 (2)、u st=+U d:电能在电网、变压器漏抗与中间回路之间交换能量,此时u L=u N-U d, I d0=I N (3)、u st=-U d:电能在电网、变压器漏抗与中间回路之间交换能量,此时u L=u N+U d, I d0=-I N 用脉宽调制产生各开关元件的PWM信号,在变流器输入端形成了基波频率与网频一样的脉宽调制电压。现假设该调制电压为理想的正弦波,当u N和调制电压u st 图3 牵引工况和制动工况下的四象限变流器基波矢量图
发动机电子控制系统的控制策略 摘要 汽油机电子控制系统的控制软件的各种控制方法,以及与特定汽油机匹配时各种参数的标定技术均被汽油机控制管理系统的供应商视为核心机密,很少有公开的资料。国产整车制造商要想真正有所发展,就必须解决国外对汽油机控制管理系统的技术封锁,设计出自己的控制管理系统。国家每年也不断加大对汽油机控制管理系统的研究的投入,以不断缩短在这方面与国外的差距。 关键字 引言 发动机的工作过程是一个非常复杂的燃烧过程也是热能与机械能的能量转换过程,影响发动机性能的主要因素是空燃比和点火定时,所以发动机控制的主要内容是空燃比和点火提前角,本章主要研究发动机的控制策略,以使发动机具有良好的动力性、经济性、排放性和起动性能。 国内的研究还主要集中在8位单片机,上述研究取得了不少成果,但生产的只是一些控制系统的原件还没有达到全部配套的水平。国外,在控制策略和理论方面,己由过去的简单的开环控制发展到闭环反馈控制,由传统的PID调节控制发展为模糊PID控制,自适应学习控制等等。而且电控系统不断向集成化、智能化发展,其控制精度越来越高,控制范围越来越广。 1、空燃比控制策略 从理论上讲,空燃比在14.7时,燃油可以完全燃烧,此时发动机具有较好的经济性和排放性,但考虑到发动机的综合性能,在不同的工作状况需要不同的空燃比.因此,燃油系统的功能是控制混合气的空燃比。 电控汽油机的空燃比控制策略按控制方式可以分为两种:开环控制和闭环控制。 在开环控制系统中,不需要将输出量的反馈量与输入量进行比较,因此开环控制容易实现,在发动机实际运行过程中,ECU依据当前工况查找喷油MAP得到相应的喷油脉宽值。再根据传感器检测的冷却水温度、进气温度、蓄电池电压、节气门开度等参数,对基本喷油脉宽进行修正,确定出最佳的喷油持续时间。开环控制具有方法简单、响应速度快的优点,但控制精度直接取决于ECU储存的基本数据的准确度、程序及处理方法的适用度、各种传感器的性能和精度,以及电磁喷油器的调整精度等。当喷油器和传感器性能发生变化时混合气就不能保持在原预设的空燃比上,其不能通过反馈进行喷油量的自行修正。因此,它对发动机及控制系统的各个组成部分精度要求高,无法对外界干扰因素进行补偿修正,系统需要非常强的抗干扰能力,当使用工况超过预定范围时,不能实现有效的控制 闭环控制方式闭环控制是在开环控制的基础上增加反馈回路形成的,闭环控制通过对发动机的性能参数进行不断的检测,通过检测到的系统输出量主动修正控制量。闭环控制方式是在排气管上加装一个氧传感器,以随时检测废气中的氧含量,并将检测结果转变为电信号及时反馈给ECU。ECU根据电压值的大小可随时修正喷入的燃油量。 但不是在所有的工况都可以采用闭环控制,在起动工况、全负荷工况、瞬态工况、断油工况、氧传感器(EOO)故障等运行状况时,系统将进入开环控制,这是因为氧传感器己经不能够正确的反映混合气的空燃比。要进行空燃比闭环控制,必须配备反馈空燃比信息的氧传感器EGO。闭环控制的目的是为了混合气的空燃比维持在理想空燃比附近,以保持三元催化器的最高转化效率。所以,空燃比闭环控制必须有三元催化器。 闭环控制的优点是:空燃比控制精度高,可消除因发动机元器件质量、装配误差和磨损等。汽油机电控燃油喷射系统ECU技术使工作稳定性好,抗干扰能力强。总之,虽然闭环控制方式有许多有点,但也有不足之处,例如控制周期长,且有滞后现象。从混和气形成并吸入气缸,经过燃烧,排气,再经氧传感器检出排气中的含氧浓度,需要一定的时间,即存在时间滞后。因此,实际闭环控制中,混和气的空燃比总保持在理论空燃比附近的一个很窄的范围内即在14.7附近,以使三元催化装置对排气净化处理达到最效果。 在实际中,开环控制方式或闭环控制方式是要根据发动机的具体工况,一般在起动期间、冷却水温度较低时、暖机期、加减速工况、负荷、断油控制或在氧传感器准备不充分或发生故障时,需要控制系统停止反馈控制,采用开环方式提供较浓的混合气来保证发动机的种性能。其他稳定工况采用闭环控制。因此,发动机电控汽油喷射系统中,一般采用开环与闭环控制相结合的混合控制方式。
3.2.2 电流的直接控制 电流直接控制,就是采用跟踪型的PWM 控制技术对电流波形的瞬时值进行反馈控制,可以采用滞缓比较方式,也可采用三角波比较方式,进行电流的直接控制。采用PWM 技术的直接控制方法从原理上来说可以有效地滤除系统中的无功电流和全部有害电流。与间接控制方法相比较,直接控制方法具有更高的响应速度和控制精度,但它要求开关频率高,因为大功率器件很难以高开关频率运行,因此不采用电流直接控制。一般来说,电流直接控制适合于小功率场合。但从目前世界上运行的无功补偿器的情况看来,电流直接控制在中、大容量系统也有应用。日本新农用于输电80Mvar 的SVG 和日本神户用于钢厂负荷补偿20Mvar 的SVG 均采用了电流直接控制方式。前者在电网严重不对称,甚至短路时仍可照常工作;后者对炼钢电极短路引起的电网电压闪变有很好的抑制作用。电流直接控制的SVG 控制系统有两种基本结构:1.滞环比较控制;2.电压电流双闭环控制. 本文主要讨论电压电流双闭环控制方法。控制结构如图3.2所示,采用了dq 轴下的瞬时控制系统。SVG 发出的电流瞬时值经dq0坐标变换变为d i q i 0i ,与有功电流、无功电流参考值作比较后,经PI 调节器所得值,再经dq0反变换,得到三相电压信号,进行三角波比较电流跟踪型PWM 控制。其中,有功电流参考值由直流侧电压参考值与直流侧电容电压反馈值比较后经PI 调节器得到。由于 参考值*d i 和* q i ,和反馈值d i q i 在稳态时均为直流信号,因此通过PI 调节器可以实 现无稳态误差的电流跟踪控制。即此方法中采用了双闭环反馈控制,内环是电流环控制,外环是电压环控制。
四象限变流器双闭环电流控制的研究摘要:介绍了四象限变流器的工作原理,并在此基础上推导出四象限变流器的数学模型。通过四象限变流器双闭环直接电流控制的数学模型搭建了仿真框架,最后通过MATLAB/Simulink进行了仿真研究,结果表明基于双闭环直接电流控制的四象限变流器具有很好的稳态和瞬态性能,网侧功率因数接近于1。叙词:谐波污染功率因数直接电流控制Abstract:The four-quadrant converter mathematical model is derived by its operation principle and working conditions and then the simulation is built according to its mathematical model. The simulation which is used by MATLAB/Simulink proved that double-loop direct current control is an effective way to achieve stable output DC voltage, suppress the harmonics effectively and achieve the net power factor close to 1. Keyword:Harmonic pollution, Power factor, Direct current control 1 引言 随着电力电子装置的广泛使用,由此引起的谐波污染问题逐渐受到了人们的重视。整流装置是谐波主要的来源,因此有必要研制高功率因数、低谐波整流器以消除谐波源。与传统的二极管不控整流、相控整流相比,四象限变流器具有功率因数高、直流侧电压稳定、输入电流谐波小、开关损耗小、电磁污染少等优点[3]。 四象限变流器的控制策略主要有间接电流控制和直接电流控制两种。间接电流控制通过调节变流器交流侧电压的幅值和相位达到控制输入电流的目的[1]。双闭环直接电流控制在间接电流控制的基础上引入网侧输入电流反馈,具有动态响应速度快、网侧输入电流谐波小和直流侧输出电压稳定等优点[1]。本文首先介绍了四象限变流器的工作原理和数学模型,比较了基于直接电流控制与间接电流控制的四象限变流器工作性能,在此基础上研究了直接电流控制四象限变流器的控制模型与PI参数设计。最后,通过仿真结果验证了本文提出的直接电流控制四象限变流器具备优良的稳态和瞬态工作性能。 2 工作原理 四象限变流器的主电路结构如图1所示。其中UN为输入电压;电感LN为网侧等效电感,起到传递能量、抑制高次谐波、平衡桥臂终端电压和电网电压的作用;RN为网侧电阻;T1~T4为全控型开关器件(如MOSFET、IGBT等);D1~D4为续流二极管;Cdc 为滤波电容,为高次谐波电流提供低阻抗通路,减少直流电压纹波;C2、L2分别为二次滤波电容和电感;RL为负载电阻;Udc为直流侧输出电压。 图1 四象限变流器主电路
牵引变流器 牵引变流器从负载来看可分为电压型和电流型两种。由于电压型变流器相对于电流型变流器具有较大的优势,所以在交流传动领域大多采用电压型逆变器。电压型变流器的驱动一般采用“四象限变流器+中间直流电路+电压型逆变器+异步牵引电动机”的方式。 根据变流器输出交流侧相电压的可能取值可将电压型变流器分为两点式和三点式。在交流传动领域,当中间电路直流电压kV kV U d 8.2~7.2>时,主电路中通常采用两点式结构;当kV U d 3>时,宜采用三点式结构。下面将分别介绍两点式变流器和三点式变流器的工作原理。 一、两点式牵引变流器 图3.1为两点式牵引变流器的一种典型电路。它主要由两点式四象限脉冲整流器、中间直流电压回路和两点式PWM 逆变器组成,由牵引变压器的二次绕组供电。 图3.1 两点式变流器电路原理图 逆变器把中间回路直流电压变成幅值和频率可调的三相交流电压,供给异步牵引电机。在起动范围内,逆变器按脉宽调制模式进行控制,当逆变器输出达到规定值时,转入方波模式。有时,在逆变器和异步牵引电机之间串入平波电抗器,用以抑制起动过程电动机电流中的谐波分量,改善转矩脉动状况,并减少损耗。起动完成后,通过接触器把它短接。 当机车进行再生制动时,整个系统的工作原理及方式没有发生什么变化,主电路结构也不发生任何变化。为了使牵引电动机能够进入发电机状态,控制系统应使异步牵引电动机工作在负的转差频率。在交流传动电力机车发展的初期,为保证电气制动的可靠性和安全性,还装有制动电阻和转换开关。如果电网不能接受再生能量或网侧整流器故障,应立即在无电流状态下接入制动电阻。 1.两点式四象限脉冲整流器及中间储能环节 1) 两点式四象限脉冲整流器 在交流传动领域,网侧变流器现大多采用四象限脉冲整流器,它具有以下优点: (1)能量可以双向流动; (2)从电网侧吸收的电流为正弦波; (3)功率因数可到达1; (4)减低了接触网的等效干扰电流,减少对通讯的干扰; (5)可以保证中间回路直流电压在允许偏差内。 四象限脉冲整流器的结构如图3.2所示。
HXD3型电力机车四象限变流器分析 摘要:本文用对比的方法对HXD3型电力机车牵引变流器中的四象限变流器和韶山系列电力机车中普遍采用的相控整流器进行分析,来说明交流传动机车的特点。 关键词:四象限变流器三段不等分半控桥 1. 引言 HXD3型交流传动电力机车由大连机车车辆有限公司与日本东芝公司合作,以大连机车车辆有限公司研制的SSJ3型交流传动电力机车和日本东芝公司生产的EH500型电力机车为技术平台,为在中国主干线上进行大型货运牵引为目的而设计、研发的。 机车采用交流传动、PWM矢量控制等新技术,能够满足环境温度在-40~40℃、海拔高度在2500m以下适应在中国全境范围内运行,并尽量考虑对环境的保护。机车可以4台重联控制运行。 HXD3型电力机车每台机车装有两台变流装置,每台变流装置内含有三组牵引变流器和一组辅助变流器,使其结构紧凑,便于设备安装。参见图1。每组牵引变流器主要由四象限脉冲变流器、中间直流环节、PWM(脉冲宽度调制)逆变器等组成。 2. 四象限变流器与相控整流器的比较分析 HXD3型电力机车的牵引变流器中的整流器不再是相控整流器,而是采用了四象限变流器。下面分别对相控整流器(常用三段不等分半控桥式整流器)和四象限变流器的原理加以分析说明。 2.1.三段不等分半控桥式整流器的工作原理 目前担当运营任务的韶山系列电力机车普遍采用半控桥式整流电路作为整流器电路。其中以三段不等分半控桥式整流器(SS4改型,SS3B型等电力机车采用)最为典型。其电路主要由二极管和晶闸管组成。其原理图见图2。 网侧25KV(50Hz)单相交流电压经主变压器降压后,各段绕组的电压为: 第Ⅰ段:a2x2-T5T6D3D4工作,大桥调压,晶闸管的控制角为α1,T1~T4晶闸管封锁,即第Ⅱ段桥晶闸管的控制角α2和第Ⅲ段桥晶闸管的控制角α3均为π。负载电流流过a2x2、T5T6、D3D4、L、M、D1D2。整流输出电压的平均值为:
时速200公里动车组项目 牵引辅助变流器技术方案说明书 永济新时速电机电器有限责任公司 2007年11月12日
牵引辅助变流器技术方案说明书 1 项目来源 与长客股份签订的《时速200公里动车组项目-牵引辅助变流器采购意向书》 2 引用标准 EN50207(2000) 铁路应用机车车辆用电力变流器 EN61373(1999) 振动和冲击试验 EN50121-1(1997) 电磁兼容性-总则 EN50121-3-2(2000) 电磁兼容-车辆设备 EN50124 绝缘的协调性 EN50125-1 铁路应用设备环境条件第1 部分:车载设备 EN50153 铁路应用车辆对于电气危险的防护规范 EN 50155 铁路应用车辆用电气设备 EN 50163 铁路应用牵引系统的电力供应 EN60077-1 通用维护条件(TB/T1333.1-2002 铁路应用机车车辆电气设备第1部分:一般使用条件和通用规则) EN 60310 铁路应用车载牵引变压器和电感器 3 依据的技术规范 AX00000064269 牵引、方向、速度控制器技术规范(C版本) AY00000001332 牵引、辅助系统技术要求(C版本) AY00000001333 牵引、辅助系统技术描述(B版本) 2442DT 牵引辅助变流器技术描述 4 技术描述与主要技术参数 按照AY1332、AY1333技术规范中描述的牵引特性、制动特性、辅助系统的技术要求,对牵引辅助变流器的技术方案描述如下: 4.1 概述 在周围环境温度为40℃和接触网电压大于或等于22.5kV的条件下,每台牵引辅助变流器能够同时给两台牵引电动机提供550kW的功率,满足动车组的电气牵引和制动特性—再生制动(接触网吸收能量时)或电阻制动(过分相时)—以及辅助系统供电。 牵引辅助变流器主要包括: - 2个四象限变流器(4QC1和4QC2),给2个牵引逆变器和1个辅助变流器供电。 - 2个三相逆变器(INV-TRAZ1和INV-TRAZ2),每个给一个异步牵引电动机供电。 - 2个制动斩波器(CHF1和CHF2),当列车在过分相区制动时,能够将能量消耗在制动电阻上。
—17— 2003年第6期2003年11月10日机车电传动 ELECTRICDRIVEFORLOCOMOTIVES№6, 2003 Nov. 10, 2003 男,1993年毕业于西南交通大学电力牵引与传动控制专业,工程师,现从事交流传动控制系统的开发工作。 摘要:介绍了一种使用MATLAB软件实现四象限变流器瞬态电流控制的仿真方法,并使用该 仿真系统对变流器的动态响应、电流的错层、电流频谱、变流器元件的开关波形进行了分析。仿真结果表明,仿真模型的建立是真实、准确的。 关键词:四象限变流器; 瞬态电流; 控制; 仿真 中图分类号:TM46; TP391.9 文献标识码:A 文章编号:1000-128X(2003)06-0017-04 收稿日期:2003-02-12; 收修改稿日期:2003-05-29 Simulation study on transient current control of four quadrant converter ZOU Ren (R & D Center, Zhuzhou Electric Locomotive Research Institute, Zhuzhou, Hunan 412001, China) Abstract: A simulation method is introduced to realize the transient current control of four quadrant converter by MATLAB.Analysis is made to the dynamic response, current stagger, current spectrum and component switching waveforms with the simulationsystem. The simulation results indicate that the building of the model is real and true. Key words: four quadrant converter; transient current; control; simulation 0引言 四象限变流器是交流传动系统的一个重要组成环节。它不仅使中间直流环节的电压保持恒定,使供电接触网或牵引变压器一次侧的功率因数接近于1,在网侧获得一个近似正弦波的电流,减少对周围环境的电磁干扰。一般,四象限变流器控制有瞬态电流控制和电压相量控制2种方法。而比较起来,瞬态电流控制具有更好的瞬态特性,并且在电网电压发生畸变的情况下,四象限变流器输入电流的畸变也很小。因此在实际应用中,大多数都采用瞬态电流控制的方法。我国“中原之星”电动车组和“奥星”电力机车都采用瞬态电流控制的方法,不过由于各种试验条件的限制,对于四象限变流器的工作情况不便进行全面的评估。为方便对四象限变流器控制方案进行验证及全面了解四象限变流器的工作情况采用MATLAB软件实现了四象限变流器控制的仿真,并对变流器的动态响应、电流的错层、电流频谱、 变流器元件的开关波形进行了分析。 1四象限变流器的原理 图1为四象限变流器交流电源侧等效电路。其中LN 和RN分别为折合到二次侧的变压器绕组的漏感和电 阻,UN为变压器二次侧电压相量,IN为变压器二次侧电 流的基波相量,US为调制电压的基波相量,可得到二次 侧交流回路的相量电压方程式为: U= U + IR+ jωLI ………………….(1) 假设UN 和US的相角为Φ,UN和IN的相角为θ,则用该方程表示牵引工况的相量图如图2(a)所示。同样对于再生制动工况,其相量图如图2(b)所示。 四象限变流器交流电源侧等效电路图 ??????????