第六章习题翻译
第一部分复习题
6.1给出可重用资源和可消费资源的例子。
答:可重用资源:处理器,I/O通道,主存和辅存,设备以及诸如文件,数据库和信号量之类的数据结构。
可消费资源:中断,信号,消息和I/O缓冲区中的信息。
6.2可能发生死锁所必须的三个条件是什么?
答:互斥,占有且等待,非抢占。
6.3产生死锁的第4个条件是什么?
答:循环等待。
6.4如何防止占有且等待的条件?
答:可以要求进程一次性地请求所有需要的资源,并且阻塞这个资源直到所有请求都同时满足。
6.5给出防止无抢占条件的两种方法。
答:第一种,如果占有某些资源的一个进程进行进一步资源请求被拒绝,则该进程必须释放它最初占用的资源,如果有必要,可再次请求这些资源和另外的资源。
第二种,如果一个进程请求当前被另一个进程占有的一个资源,则操作系统可以抢占另一个进程,要求它释放资源。
6.6如何防止循环等待条件?
答:可以通过定义资源类型的线性顺序来预防。如果一个进程已经分配到了R类型的资源,那么它接下来请求的资源只能是那些排在R类型之后的资源类型。6.7死锁避免,检测和预防之间的区别是什么?
答:死锁预防是通过间接地限制三种死锁必要条件的至少一个或是直接地限制循环等待的发生来避免死锁的出现。死锁避免允许可能出现的必要条件发生,但是采取措施确保不会出现死锁的情况。而死锁检测允许资源的自由分配,采取周期性的措施来发现并处理可能存在的死锁情况。
第二部分习题
6.1写出图6.1(a)中死锁的四个条件。
解:互斥:同一时刻只有一辆车可以占有一个十字路口象限。占有且等待:没有车可以倒退;在十字路口的每辆车都要等待直到它前面的象限是空的。非抢占: 没有汽车被允许挤开其他车辆。循环等待: 每辆汽车都在等待一个此时已经被其他车占领的十字路口象限。
6.2按照6.1节中对图6.2中路径的描述,给出对图6.3中6种路径的简单描述。
解:1.Q 获得 B 和A, 然后释放 B 和 A. 当 P 重新开始执行的时候, 它将会能够获得两个资源。
2. Q 获得 B和A, P 执行而且阻塞在对 A的请求上. Q释放 B 和A。当 P 重新开始执行的时候,它将会能够获得两个资源。
3. Q 获得 B ,然后 P 获得和释放 A. Q 获得A然后释放
B 和 A. 当 P 重新开始行的时候,它将会能够获得 B。
4. P 获得A然后 Q 获得 B. P 释放 A. Q 获得A然后释放
B. P 获得 B 然后释放 B。
5. P 获得,然后释放 A. P 获得 B. Q 执行而且阻塞在对B的请求上。P释放B。当 Q 重新开始执行的时候,, 它将会能够获得两个资源。
6. P 获得A而且释放A然后获得并且释放 B. 当 Q 重新开始实行, 它将会能够获得两个资源。
6.3图6.3反映的情况不会发生死锁,请证明。
证明:如果 Q 获得 B 和A(在 P之前请求A), 那么 Q 能使用这些两类资源然后释放他们, 允许A进行。如果 P在 Q之前请求A获得A, 然后Q 最多能执行到请求A然后被阻塞。然而,一旦 P 释放 A , Q 能进行。一旦 Q 释放 B, A能进行。
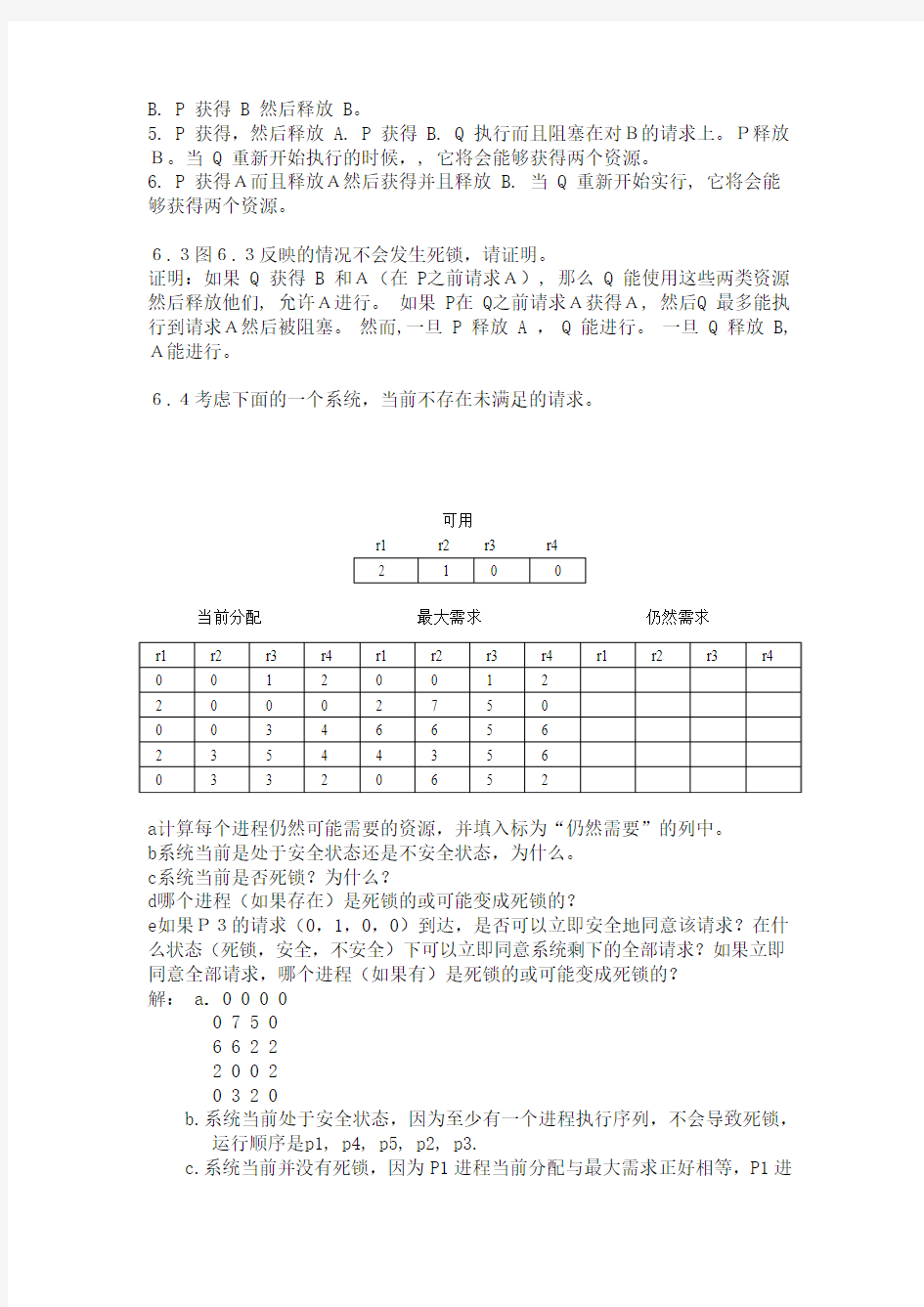
6.4考虑下面的一个系统,当前不存在未满足的请求。
可用
当前分配最大需求仍然需求
a计算每个进程仍然可能需要的资源,并填入标为“仍然需要”的列中。
b系统当前是处于安全状态还是不安全状态,为什么。
c系统当前是否死锁?为什么?
d哪个进程(如果存在)是死锁的或可能变成死锁的?
e如果P3的请求(0,1,0,0)到达,是否可以立即安全地同意该请求?在什么状态(死锁,安全,不安全)下可以立即同意系统剩下的全部请求?如果立即同意全部请求,哪个进程(如果有)是死锁的或可能变成死锁的?
解:a. 0 0 0 0
0 7 5 0
6 6 2 2
2 0 0 2
0 3 2 0
b.系统当前处于安全状态,因为至少有一个进程执行序列,不会导致死锁,
运行顺序是p1, p4, p5, p2, p3.
c.系统当前并没有死锁,因为P1进程当前分配与最大需求正好相等,P1进
程可以运行直至结束,接下来运行其他进程
d.P2,P3,P4,P5可能死锁
e.不可以,当进程P1,P4,P5执行完可用资源为(4,6,9,8),P2,P3将死
锁,所以不安全,完全不可以立即同意系统剩下的全部请求。
6.5 请把6.4中的死锁检测算法应用于下面的数据,并给出结果。
Available=(2 1 0 0)
2 0 0 1 0 0 1 0
Request= 1 0 1 0
Allocation= 2 0 0 1
2 1 0 0 0 1 2 0
解: 1. W = (2 1 0 0)
2. Mark P3; W = (2 1 0 0) + (0 1 2 0) = (2 2 2 0)
3. Mark P2; W = (2 2 2 0) + (2 0 0 1) = (4 2 2 1)
4. Mark P1; no deadlock detected 没有死锁
6.6一个假脱机系统包含一个输入进程I,用户进程进程P和一个输出进程O,它们之间用两个缓冲区连接。进程以相等大小的块为单位交换数据,这些块利用输入缓冲区和输出缓冲区之间的移动边界缓存在磁盘上,并取决于进程的速度。所使用的通信原语确保满足下面的资源约束:i+o ≤max
其中,max 表示磁盘中的最大块数,i 表示磁盘中的输入块数目, o 表示磁盘中的输出块数目。
以下是关于进程的知识:
1.只要环境提供数据,进程I最终把它输入到磁盘上(只要磁盘空间可用)。 2.只要磁盘可以得到输入,进程P最终消耗掉它,并在磁盘上为每个输入块输出有限量的数据(只要磁盘空间可用)。
3.只要磁盘可以得到输出,进程O最终消耗掉它。说明这个系统可能死锁。
解:当I 的速度远大于P 的速度,有可能使磁盘上都是输入数据而此时P 进程要处理输入数据,即要将处理数据放入输出数据区。于是P 进程等待磁盘空间输出,I 进程等待磁盘空间输入,二者死锁。
6.7给出在习题6.6中预防死锁的附加资源约束,仍然通话输入和输出缓冲区之间的边界可以根据进程的要求变化。
解:为输出缓冲区保留一个最小数目(称为reso)块, 但是当磁盘空间足够大时允许输出块的数目超过这一个界限。资源限制现在变成
I+ O ≤max
I≤ max –reso
当0 < reso < max
如果程序 P 正在等候递送输出给磁盘, 程序 O 最后处理所有的早先输出而且产生至少reso页, 然后让 P 继续执行。因此 P 不会因为 O 而延迟。
如果磁盘充满I/O,I能被延迟; 但是迟早, 所有的早先的
输入可以被P处理完,而且对应的输出将会被 O 处理,
因而可以让I继续执行。
6.8在THE多道程序设计系统中,一个磁鼓(磁盘的先驱,用做辅存)被划分为输入缓冲区,处理和输出缓冲区,它们的边界可以移动,这取决于所涉及的进程速度。磁鼓的当前状态可以用以下参数描述:
max表示磁鼓中的最大页数,i示磁鼓中的输入页数,p示磁鼓中的处理页数,o 示磁鼓中的输出页数,reso出保留的最小页数,resp理保留的最小页数。
解:
I+ O+ P≤ max–
I+ O≤ max– resp
I+ P≤ max– reso
I≤ max– (reso+ resp)
6.9在THE多道程序设计系统中,一页可以进行下列状态转换:
1.空→输入缓冲区(输入生产)
2.输入缓冲区→处理区域(输入消耗)
3.处理区域→输出缓冲区(输出生产)
4.输出缓冲区→空(输出生产)
5.空→处理区域(输出消耗)
6.处理区域→空(过程调用)
a根据I,O和P的量定义这些转换的结果。
b如果维持习题6.6中关于输入进程,用户进程和输出进程的假设,它们中的任何一个转换是否会导致死锁。
解: 1. i← i + 1
2. i← i – 1; p ← p + 1
3. p← p – 1; o← o + 1
4. o ← o – 1
5. p← p + 1
6. p ← p – 1
b.结合在对问题 6.7 的解决办法被列出的资源限制, 我们
能总结下列各项:
6. 过程返回能立刻发生因为他们只释放
资源。
5. 程序调用可能用尽磁盘片 (p= max – reso) 导致死锁。
4. 当有输出时输出消耗能立刻发生。
3. 输出生产能暂时被延迟直到所有的早先输出被消耗而且为下一步的输出至少可以产生reso页。
2. 只要有输入,输入消耗能立刻发生。
1. 输入生产被延迟直到所有先前输入和对应的输出已经被消耗。此时, 当 i= o=0,如果消费进程还没有占用完磁盘空间 ( p < max – reso),可以产生输入。结论: 分配给消费进程的不受控制的存储空间是
唯一可能引发死锁的因素。
6.10考虑一个共有150个存储器单元的系统,其单元如下分配三个进程:
使用银行家算法,以确定同意下面的任何一个请求是否安全。如果安全,说明能保证的终止序列;如果不安全,给出结果分配简表。
a.第4个进程到达,最多需要60个存储单元,最初需要25个单元。
b第4个进程到达,最多需要60个存储单元,最初需要35个单元。
解: a.若同意第4个进程请求,则储存器单元共用去25+15+40+45=125个单元,还有25个存储单元,则可以安全执行全部进程。安全顺序是1-2-3-4
b.若同意第4个进程请求,则还有15个资源可以用,此时处于不安全状态,结果分配见表
进程最大占有需要空闲
1 70 45 25 15
2 60 40 20
3 60 15 45
4 60 3
5 25
6.11评价独家算法在实际应用中是否有用。
解:不切实际的: 不能总是预先知道最大要求, 进程数目和资源数目可能随着时间改变。大多数的操作系统忽视死锁。
6.12有一个已经实现了的管道算法,使得进程P0产生的T类型的数据元素经进程序列P1P2…Pn-1,并且按该顺序在元素上操作。
a.定义一个一般的消息缓冲区,包含所有部分消耗的数据元素,并按下面的格式为进程Pi(0≤i≤n-1)写一个算法。
Repeat
从前驱接收
消耗
给后续发送
Forever
假设P0收到Pn-1发送的空元素。该算法能够使进程直接在缓冲区中保存的消息
上操作,而无需复制。
b.说明关于普通的缓冲区进程不会死锁。
解:ar buffer: array 0..max-1 of shared T;
available: shared array 0..n-1 of 0..max;
"Initialization"
var K: 1..n-1;
region available do
begin
available(0) := max;
for every k do available (k) := 0;
end
"Process i"
var j: 0..max-1; succ: 0..n-1;
begin
j := 0; succ := (i+1) mod n;
repeat
region available do
await available (i) > 0;
region buffer(j) do consume element;
region available do
begin
available (i) := available(i) – 1;
available (succ) := available (succ) + 1;
end
j := (j+1) mod max;
forever
end
b.死锁可以被解决通过
P0 waits for Pn-1 AND
P1 waits for P0 AND
. . . . .
Pn-1 waits for Pn-2
因为
(available (0) = 0) AND
(available (1) = 0) AND
. . . . .
(available (n-1) = 0)
但是如果max > 0,这个条件不成立,因为临界域满足
claim(1)+ claim(2)+…+claim(n)
< available(1)+available(2)+…+available(n)
=max
6.13 a.3个进程共享4个资源单元,一次只能保留或释放一个单元。每个进程最大需要2个单元。说明不会死锁。
b.N个进程共享M个资源单元,一次只能保留或释放一个单元。每个进程最大需要单元数不超过M,并且所有最大需求的总和小于M+N。说明不会发生死锁。
解:a.说明由于每个进程最多需要2个资源,最坏情况下,每个进程需要获得一个,系统还剩1个,这一个资源,无论分给谁都能完成。完成进程释放资源后,使剩余进程也完成,故系统不会死锁。
b.假定每个进程最多申请X个资源,最坏情况下,每个进程都得到X-1个资源都在申请最后一个资源,这时系统剩余资源数量为M-N(X-1),只要系统还有一个剩余资源,就可以使其中的一个进程获得所需要的全部资源,该进程运行结束以后释放资源,就可以使其他进程得到全部资源的满足,因此,当M-N(X-1)》1时系统不会发生死锁,解这个不等式X《(M+N-1),系统不会发生死锁,因此,当所有进程的需求总和小于M+N时,系统是不会发生死锁的。
6.14考虑一个由四个进程和一个单独资源组成的系统,当前的声明和分配矩阵是
3 1
2 1
C = 9 A= 3
7 2
对于安全状态,需要的最小资源数目是多少?
解:最小资源数是3个,总共有10个资源。P2获得一个资源,完成后释放两个资源,P1获得三个资源,完成后释放三个资源,接下来P4获得五个资源,释放完资源后,P3获得所需的6个资源后完成。
6.15考虑下列处理死锁的方法:1银行家算法,2死锁检测并杀死线程,释放所有资源,3事先保留所有资源,4如果线程需要等待,5资源排序,6重新执行检测死锁并退回线程的动作。
评价解释死锁的不同方法使用的一个标准是,哪种方法允许最大的并发。换言之,在没有死锁时,哪种方法允许最多数目的线程无需要等待继续前进?对下面列出的6种处理死锁的方法,给出从1到6的一个排序(1表示最大程序的并发),并解释你的排序。
另一个标准是效率;哪种方法需要最小的处理器开销?假设死锁很少发生,给出各种方法从1到6的一个排序(1表示最有效),并解释这样排序的原因。如果死锁发生很频繁,你的顺序需要改变吗?
解:a从最多并发事件到最少, 有一个大概的次序如下:
1. 死锁检测并杀死线程,释放所有资源
发现死锁并退回线程的动作,如果线程需要等候那么重新开始线程而且释放所有
的资源,在死锁发生之前,这些运算法则都不会限制并发, 因为他们仰赖运行时间检查而并非静态的限制。他们的效果在死锁被发现比较难以描述:他们仍然允许许多并发(在一些情形,他们增加它), 但是很难有准确的估计。第三个运算法则是最奇怪的, 因为如此后许多的它的并发将会是无用的重复; 因为线程竞争执行时间, 这一个运算法则也影响运行速度。因此在两者的极端,它以这顺序被列出两次。
2. 银行家的运算法则
资源排序
这些运算法则因为限制多种的可允许的计算,而相对早先两种法则会引起更多的不必要的等候。银行家的运算法则避免不安全的配置和资源排序限制配置序列以便线程在他们是否一定等候的时候有较少的选择。
3. 事先保留所有的资源
这一个运算法则相比前两个要允许更少的并发, 但是比最坏的那一种有更少的缺点。因为要预先保留所有的资源,线程必须等候比较长的而且当他们工作的时候更有可能阻塞其他的线程,因此系统上来说具有更多的线性。
4. 如果线程需要等待,则重新启动线程并且释放所有的资源
如上所述, 这一个运算法则在区别最多和最少并发上有疑问,这具体要看并发的定义。
b从最高效率到最低,有如下大概的一个顺序:
1. 预先保留所有的资源
资源排序
因为他们没有包括运行时间经常开支,所以这些运算法则最有效率。
注意这是在相同的静态限制下的结果。
2. 银行家的运算法则
发现死锁而且杀死线程,释放它的资源
这些运算法则在概略的配置上包括运行时间检查
; 银行家的运算法则运行搜寻查证复杂度在线程和配置的数字和死锁检测中是O(n m),死锁检测的复杂度是 O(n)。资源-从属链被线程数目,资源数目和分配数目限制。
3. 发现死锁并退回线程的动作
这一个运算法则运行也需要运行上述的相同的时间检查。
在写内存上的复杂度为O(n) 。
4. 如果线程需要等待,则重新启动线程并释放所有的资源
这一个运算法则是非常无效率,有如下两个理由。首先, 因为线程有重新开始的危险, 他们完成的可能性低。其次,他们与其他重新开始线程竞争有限的执行时间, 因此整个系统运行的速度很慢。
6.16评价下面给出的就餐问题的解决方案。一位饥饿的哲学家首先拿起他左边的叉子,如果他右边的叉子也是可用的,则拿起右边的叉子开始吃饭,否则他放下左边的叉子,并重复这个循环。
解:如果哲学家们步调完全一致地拿起左边叉子又放下的话,他们会重复这一过程,导致饥饿情况的出现。
6.17假设有两种类型的哲学家。一类总是先拿起左边的叉子(左撇子),另一类总是先拿起右边的叉子(右撇子)。左撇子的行为和图6.12中定义的一致。右撇子的行为如下:
begin
repeat
think;
wait(fork[(i+1)mod5]);
wait(fork[i]);
eat;
signal(fork[i]);
signal(fork[(i+1)mod5]);
forever;
end;
证明:a如果至少有一个左撇子或右撇子,则他们的任何就座安排都可以避免死锁。
b如果至少有一个左撇子或右撇子,则他们的任何就座安排都可以防止饥饿。
解:a假设存在死锁情况,设有 D个哲学家,他们每人都有一支叉子而且另一
支叉子被邻居占有。不失一般性,设Pj 是一个左撇子。 Pj 抓牢他的左边叉子而且没有他的右边叉子, 他的右边邻居 Pk 没有完成就餐因此也是一个左撇子。因此依次推理下去所有这D个哲学家都是左撇子。这与既有左撇子又有右撇子的条件矛盾,假设不成立,不存在死锁。
b
假设左撇子 Pj 饥饿,也就是说,有一部分人在就餐而Pj从不吃。假如 Pj 没有叉子。这样 Pj 的左边邻居 Pi 一定持续地占有叉子而始终不吃完。因此Pi 是右撇子,
抓住他的右边叉子, 但是从不得到他的左边叉子来完成就餐,也就是说 Pi
也饥饿。现在 Pi 左边邻居也一定是持续占有右边叉子的右撇子。向左进行这样的推理,得出所有哲学家都是饥饿的右撇子,这同Pj是个左撇子矛盾。因此 Pj 一直拥有左边子而且在等待他的右边叉子,Pj 的右边邻居 Pk 一直举着他的左边叉子而且从不完成一餐,也就是, Pk 是也饥饿的左撇子。如果 Pk 不是一直拿着他的左边叉子, Pj 就可以就餐;因此 Pk 拿着他的左边叉子。向右推理可得所有哲学家都是饥饿的左撇子。这与条件矛盾,因此假设不成立,没有人饥饿。
6.18图1.17显示了另外一个使用管程解决哲学家就餐问题的方法。和图6.14比较并阐述你的结论。
解:图6.14是等待可用的叉子,图6.17是等待邻居吃完,在本质上逻辑是一样的,后者显得更加紧凑。
6.19在表6.13中,Linux的一些原子操作不会涉及到对同一变量的两次访问。比如atomic_read(atomic_t *v).简单的读操作在任何体系结构中都是原子的。为什么该操作增加到了原子操作的指令表?
解:原子操作是在原子数据类型上操作, 原子数据类型有他们自己的内在的
格式。因此,不能用简单的阅读操作, 但是特别的阅读操作
对于原子数据类型来说是不可或缺的。
6.20考虑Linux系统中的如下代码片断:
read_lock(&mr_rwlock);
write_lock(&mr_rwlock);
mr_rwlock是读者写者锁。这段代码的作用是什么?
解:因为写者锁将会自旋,所以这段代码会导致死锁, 等待所有的
读者解锁, 包括唤醒这个线程。
6.21两个变量a和b分别有初始值1和2,对于Linux系统有如下代码:
使用内在屏障是为了避免什么错误?
解:没有使用内存屏障, 在一些处理器上可能 c接到b 的新值, 而d接到b 的旧值。举例来说, c可以等于 4(我们期待的), 然而 d 可能等于 1.(不是我们期待的)。使用mb() 确保a 和 b 按合适的次序被写, 使用 rmb()确保 c 和d 按合适的次序被读。
第十一章 I/O管理和磁盘调度 复习题 11.1列出并简单定义执行I/O的三种技术。 ·可编程I/O:处理器代表进程给I/O模块发送给一个I/O命令,该进程进入忙等待,等待操作的完成,然后才可以继续执行。 ·中断驱动I/O:处理器代表进程向I/O模块发送一个I/O命令,然后继续执行后续指令,当I/O模块完成工作后,处理器被该模块中断。如果该进程不需要等待I/O完成,则后续指令可以仍是该进程中的指令,否则,该进程在这个中断上被挂起,处理器执行其他工作。 ·直接存储器访问(DMA):一个DMA模块控制主存和I/O模块之间的数据交换。为传送一块数据,处理器给DMA模块发送请求,只有当整个数据块传送完成后,处理器才被中断。 11.2逻辑I/O和设备I/O有什么区别? ·逻辑I/O:逻辑I/O模块把设备当作一个逻辑资源来处理,它并不关心实际控制设备的细节。逻辑I/O模块代表用户进程管理的一般I/O功能,允许它们根据设备标识符以及诸如打开、关闭、读、写之类的简单命令与设备打交道。 ·设备I/O:请求的操作和数据(缓冲的数据、记录等)被转换成适当的I/O指令序列、通道命令和控制器命令。可以使用缓冲技术,以提高使用率。 11.3面向块的设备和面向流的设备有什么区别?请举例说明。 面向块的设备将信息保存在块中,块的大小通常是固定的,传输过程中一次传送一块。通常可以通过块号访问数据。磁盘和磁带都是面向块的设备。 面向流的设备以字节流的方式输入输出数据,其末使用块结构。终端、打印机通信端口、鼠标和其他指示设备以及大多数非辅存的其他设备,都属于面向流的设备。 11.4为什么希望用双缓冲区而不是单缓冲区来提高I/O的性能? 双缓冲允许两个操作并行处理,而不是依次处理。典型的,在一个进程往一个缓冲区中传送数据(从这个缓冲区中取数据)的同时,操作系统正在清空(或者填充)另一个缓冲区。 11.5在磁盘读或写时有哪些延迟因素? 寻道时间,旋转延迟,传送时间 11.6简单定义图11.7中描述的磁盘调度策略。 FIFO:按照先来先服务的顺序处理队列中的项目。 SSTF:选择使磁头臂从当前位置开始移动最少的磁盘I/O请求。 SCAN:磁头臂仅仅沿一个方向移动,并在途中满足所有未完成的请求,直到
上海电力学院 课程设计报告 课程名称:操作系统原理 题目名称:采用可变分区存储管理,模拟主存空间的分配和回收 姓名: xxx 学号: xxx 班级: 2013054 同组姓名: xxx 课程设计时间: 2015.7.6~2015.7.10 评语: 成绩:
课程设计题目 一、设计内容及要求 可变分区存储管理模拟 设计内容:编写程序模拟实现可变分区存储管理。 具体要求: 编写程序模拟实现可变分区存储管理,实现存储管理的基本功能,包括内存的分配、内存的回收、地址变换等。 输入:1、输入新进程名称及使用内存的大小(可创建多个进程); 2、撤销某个指定的进程; 3、某个进程的逻辑地址; 输出:显示每次创建进程或者撤销进程后内存使用的状况,包括每一个进程占据的内存的位置和大小; 计算并输出给定逻辑地址对应的物理地址。 必须分别使用以下分配算法完成模拟: 1、首次适应算法; 2、最佳适应算法; 3、最差适应算法; 小组分工: 程序设计讨论: 程序主体设计: 程序调试及修改: 实验报告设计: 总结: (要求注明小组分工情况) 二、详细设计 1)原理概述 对于可变分区存储管理的内存分配与回收,主要为设计以下几个部分: 1、设计动态输入空闲分区表的程序 2、设计内存分配的程序 3、设计内存回收的程序 首次适应算法: FF算法要求空闲分区表或空闲分区链以地址递增的次序链接。在分配内时,从链首开始查找,直至找到一个大小能满足要求分区为止;然后再按照作业大小,从该分区中划一块内存空间分配给请求者,余下的空闲分区仍留在空闲链中。如从链首直至链尾都不能找到一个能满足要求的分区,则此次分配失败,返回 最佳适应算法: BF算法是指每次为作业分配内存,总是把满足要求、又是最小的空闲分区分配给作业,避免“大材小用”。为了加速寻找,该算法要求所有的空闲分区按其容量以从小到大的顺序形成一空闲分区链。这样,第一次找到能满足要求的空闲区,
第1章计算机系统概述 1.1、图1.3中的理想机器还有两条I/O指令: 0011 = 从I/O中载入AC 0111 = 把AC保存到I/O中 在这种情况下,12位地址标识一个特殊的外部设备。请给出以下程序的执行过程(按照图1.4的格式): 1.从设备5中载入AC。 2.加上存储器单元940的内容。 3.把AC保存到设备6中。 假设从设备5中取到的下一个值为3940单元中的值为2。 答案:存储器(16进制内容):300:3005;301:5940;302:7006 步骤1:3005->IR;步骤2:3->AC 步骤3:5940->IR;步骤4:3+2=5->AC 步骤5:7006->IR:步骤6:AC->设备 6 1.2、本章中用6步来描述图1.4中的程序执行情况,请使用MAR和MBR扩充这个描述。 答案:1. a. PC中包含第一条指令的地址300,该指令的内容被送入MAR中。 b. 地址为300的指令的内容(值为十六进制数1940)被送入MBR,并 且PC增1。这两个步骤是并行完成的。 c. MBR中的值被送入指令寄存器IR中。 2. a. 指令寄存器IR中的地址部分(940)被送入MAR中。 b. 地址940中的值被送入MBR中。 c. MBR中的值被送入AC中。
3. a. PC中的值(301)被送入MAR中。 b. 地址为301的指令的内容(值为十六进制数5941)被送入MBR,并 且PC增1。 c. MBR中的值被送入指令寄存器IR中。 4. a. 指令寄存器IR中的地址部分(941)被送入MAR中。 b. 地址941中的值被送入MBR中。 c. AC中以前的内容和地址为941的存储单元中的内容相加,结果保存 到AC中。 5. a. PC中的值(302)被送入MAR中。 b. 地址为302的指令的内容(值为十六进制数2941)被送入MBR,并 且PC增1。 c. MBR中的值被送入指令寄存器IR中。 6. a. 指令寄存器IR中的地址部分(941)被送入MAR中。 b. AC中的值被送入MBR中。 c. MBR中的值被存储到地址为941的存储单元之中。 1.4、假设有一个微处理器产生一个16位的地址(例如,假设程序计数器和地址寄存器都是16位)并且具有一个16位的数据总线。 a.如果连接到一个16位存储器上,处理器能够直接访问的最大存储器地址空间为多少? b.如果连接到一个8位存储器上,处理器能够直接访问的最大存储器地址空间为多少? c.处理访问一个独立的I/O空间需要哪些结构特征? d.如果输入指令和输出指令可以表示8位I/O端口号,这个微处理器可以支持
上海电力学院 计算机操作系统原理 课程设计报告 题目名称:编写程序模拟虚拟存储器管理 姓名:杜志豪.学号: 班级: 2012053班 . 同组姓名:孙嘉轶 课程设计时间:—— 评语: 成绩: 目录 一、设计内容及要求 (4) 1. 1 设计题目 (4) 1.2 使用算法分析: (4)
1. FIFO算法(先进先出淘汰算法) (4) 1. LRU算法(最久未使用淘汰算法) (5) 1. OPT算法(最佳淘汰算法) (5) 分工情况 (5) 二、详细设计 (6) 原理概述 (6) 主要数据结构(主要代码) (6) 算法流程图 (9) 主流程图 (9) Optimal算法流程图 (10) FIFO算法流程图 (10) LRU算法流程图 (11) .1源程序文件名 (11) . 2执行文件名 (11) 三、实验结果与分析 (11) Optimal页面置换算法结果与分析 (11) FIFO页面置换算法结果与分析 (16) LRU页面置换算法结果与分析 (20) 四、设计创新点 (24) 五、设计与总结 (27)
六、代码附录 (27) 课程设计题目 一、设计内容及要求 编写程序模拟虚拟存储器管理。假设以M页的进程分配了N
块内存(N 《机械系统设计》 课程大作业—I 棒料校直机功能原理设计 院(系) 专业 学生 学号 班号 2015年4月 棒料校直机功能原理设计 1 设置棒料校直机功能原理设计的目的 功能原理设计是机械系统设计的最初环节,主要是针对产品的主要功能提出一些原理性构思,也就是针对产品的功能进行原理性设计! 针对某一产品的主要功能,设计人员在进行了大量相关资料查阅之后,应设计出几种不同的功能原理方案来,以便从中选出较理想的一个为下一步总体设计奠定基础。针对产品主要功能而进行的功能原理设计这一步,在整个设计中是非常重要的一环。一个好的功能原理设计应既有创新构思,同时又能满足用户的需求。 因此,在培养学生的机械系统设计能力时,不仅要注重机构和结构设计的培养和训练,而且更应注重功能原理设计的培养和训练。由于功能原理设计有其自身的特点和工作内容,因此,本大作业将主要针对功能原理设计进行。 2棒料校直机功能原理设计目的 棒料校直是机械零件加工前的一道准备工序。若棒料弯曲,就要用大棒料才能加工出一个小零件,如图1所示,这种加工方式材料利用率不高,经济性差。故在加工零件前需将棒料校直。 图1 待校直的弯曲棒料 3 设计数据与要求 请根据以下设计数据,进行棒料校直机的功能原理设计。 1) 棒料材料:需校直的棒料材料为45钢 2) 工作环境及环保要求:室内工作,希望冲击振动小、噪声小; 3) 工作寿命:使用期限为10年,每年工作300天,每天工作16小时; 4) 设备保养维护要求:每半年作一次保养,大修期为3年。 5) 棒料校直机原始设计数据如表1所示。 表1 棒料校直机原始设计数据 4棒料校直机功能原理设计过程 功能原理方案设计的任务是:针对某一确定的功能要求,去寻求一些物理效应并借助某些作用原理来求得一些实现该功能目标的解法原理来;或者说,功能原理设计的主要工作内容是:构思能实现功能目标的新的解法原理。这一步设计工作的重点应放在尽可能多地提出创新构思上,从而使思维尽量“发散”,以力求提出较多的解法供比较和优选。此时,对构件的具体结构、材料和制造工艺等则不一定要有成熟的考虑,故只需用简图或示意图的形式 5 棒料校直机功能原理设计要求 1) 用黑箱法寻找总功能的转换关系,给出棒料校直机的黑箱图; 2) 对棒料校直机进行总功能分解,绘制“技术过程流程图”和“总功能分解图”; 3) 建立棒料校直机的“功能结构图” 4) 寻找原理解法和原理解组合。 6 设计参考资料 教材中第二章机械系统总体设计中“露天矿开采挖掘机的原理方案设计” 7 作业成绩及其与本门课程总成绩的关系 满分4分,记入100分的总课程成绩。 根据表1任选一组进行设计。 第1章 1、在VMwane中安装CentOS 7的基本步骤有哪些? (1)新建虚拟机 (2)虚拟机设置 (3)启动虚拟机 (4)设置安装信息,包括软件选择,安装位置,分区等 (5)完成最后安装 2、安装Linux时可以设置哪些分区?有哪些分区是必须的? 能够设置的分区可以根据安装系统时提示,主要包括:/,/boot,swap,/home,/opt 等等;其中/(根)分区是必须的。 第2章 1、针对Linux 系统启动运行,有哪些运行目标?每个运行目标的含义是什么? CentOS 从7.0 开始使用systemd 代替init 作为系统启动和服务器守护进程的管理器,负责在系统启动或运行时,激活系统资源,管理服务器进程。systemd 用目标(target)替代了运行级别的概念,提供了更大的灵活性,比如可以继承一个已有的目标,并添加其他服务来创建自己的目标。CentOS 7.0 之前的运行级别和systemd 目标之间的对应关系如下表所示。 2、Linux 有几种关机方法,每种关机操作有何异同? 关闭系统的命令有: shutdown(最安全的方式),halt,init,telinit,poweroff,reboot,具体含义可以参考 帮助手册页。 第3章 more、less、cat、wc 命令有什么区别? 这几个命令可用于对文本文件的处理显示,主要区别在:more命令以分页(一次一屏)显示文本信息;less类似于more,但增加了回滚功能;cat本意是连接文件并在标准输出上输出,也就是将文件一次全部输出;wc用于统计输出文件中的行数、单词数、字节数等。 第4章 (1)发出命令显示行号。 底端命令方式下 :set nu (2)保存到文件AboutLinux,并不退出。 底端命令方式下 :w AboutLinux (3)删除一句“It is this kernel that forms the base around which a Linux operating system is developed.”。 在命令方式下,先把光标移到It处,再按d$。(从当前光标处到行末的所有字符删除)(4)查找单词“Finland”。 命令方式下输入/Finland,回车后会在第一个Finland处停下来。 (5)把第一段的“Finland”单词后的内容换行,使其变成三段内容。 插入方式下,将光标移到Finland后,按回车键即可。(vi的换行标志是回车符) (6)将第二段的内容复制到文档的最后。 命令方式下:先用yy命令,然后移到文档最后,再按p键。 (7)删除第三段的内容。 命令方式下,光标移到第三段,用dd命令。(注,这里的段实际上是第3行。) (8)恢复被删除的一段内容。 命令方式下,用u命令。 (9)查找所有的“Minix”单词,并全部改为“MINIX”。 底端命令方式下,:1,$s/Minix/MINIX/g (10)不保存修改,退出vi。 底端命令方式下,:q! (11)使用vi再次打开文件AboutLinux,在第二段后插入“He began his work in 1991 when he released version 0.02 and worked steadily until 1994 when version 1.0 of the Linux Kernel was released.”。 shell命令提示符下输入:vi AboutLinux(打开保存的文件) 《操作系统精髓与设计原理·第六版》中文版答案 ————————————————————————————————作者:————————————————————————————————日期: 2 复习题答案 第1章计算机系统概述 1.1 列出并简要地定义计算机的四个主要组成部分。 主存储器,存储数据和程序;算术逻辑单元,能处理二进制数据;控制单元,解读存储器中的指令并且使他们得到执行;输入/输出设备,由控制单元管理。 1.2 定义处理器寄存器的两种主要类别。 用户可见寄存器:优先使用这些寄存器,可以使机器语言或者汇编语言的程序员减少对主存储器的访问次数。对高级语言而言,由优化编译器负责决定把哪些变量应该分配给主存储器。一些高级语言,如C语言,允许程序言建议编译器把哪些变量保存在寄存器中。 控制和状态寄存器:用以控制处理器的操作,且主要被具有特权的操作系统例程使用,以控制程序的执行。 1.3 一般而言,一条机器指令能指定的四种不同操作是什么? 处理器-寄存器:数据可以从处理器传送到存储器,或者从存储器传送到处理器。 处理器-I/O:通过处理器和I/O模块间的数据传送,数据可以输出到外部设备,或者从外部设备输入数据。 数据处理:处理器可以执行很多关于数据的算术操作或逻辑操作。 控制:某些指令可以改变执行顺序。 1.4 什么是中断? 中断:其他模块(I/O,存储器)中断处理器正常处理过程的机制。 1.5 多中断的处理方式是什么? 处理多中断有两种方法。第一种方法是当正在处理一个中断时,禁止再发生中断。第二种方法是定义中断优先级,允许高优先级的中断打断低优先级的中断处理器的运行。 1.6 内存层次的各个元素间的特征是什么? 存储器的三个重要特性是:价格,容量和访问时间。 1.7 什么是高速缓冲存储器? 高速缓冲存储器是比主存小而快的存储器,用以协调主存跟处理器,作为最近储存地址的缓冲区。 1.8 列出并简要地定义I/O操作的三种技术。 可编程I/O:当处理器正在执行程序并遇到与I/O相关的指令时,它给相应的I/O模块发布命令(用以执行这个指令);在进一步的动作之前,处理器处于繁忙的等待中,直到该操作已经完成。 中断驱动I/O:当处理器正在执行程序并遇到与I/O相关的指令时,它给相应的I/O模块发布命令,并继续执行后续指令,直到后者完成,它将被I/O模块中断。如果它对于进程等待I/O的完成来说是不必要的,可能是由于后续指令处于相同的进程中。否则,此进程在中断之前将被挂起,其他工作将被执行。 直接存储访问:DMA模块控制主存与I/O模块间的数据交换。处理器向DMA模块发送一个传送数据块的请求,(处理器)只有当整个数据块传送完毕后才会被中断。 1.9 空间局部性和临时局部性间的区别是什么? 空间局部性是指最近被访问的元素的周围的元素在不久的将来可能会被访问。临时局部性(即时间局部性)是指最近被访问的元素在不久的将来可能会被再次访问。 1.10 开发空间局部性和时间局部性的策略是什么? 空间局部性的开发是利用更大的缓冲块并且在存储器控制逻辑中加入预处理机制。时间局部性的开发是利用在高速缓冲存储器中保留最近使用的指令及数据,并且定义缓冲存储的优先级。 第2章操作系统概述 操作系统原理期末试卷10套含答案7 一、单项选择题(每题2分,共20分) 1.以下著名的操作系统中,属于多用户、分时系统的是( B ). A.DOS系统B.UNIX系统 C.Windows NT系统D.OS/2系统 2.在操作系统中,进程的最基本的特征是( A ). A.动态性和并发性B.顺序性和可再现性 C.与程序的对应性D.执行过程的封闭性 3.操作系统中利用信号量和P、V操作,( C ). A.只能实现进程的互斥B.只能实现进程的同步 C.可实现进程的互斥和同步D.可完成进程调度 4.作业调度的关键在于( C ). A.选择恰当的进程管理程序B.用户作业准备充分 C.选择恰当的作业调度算法D.有一个较好的操作环境 5.系统抖动是指( D ). A.使用机器时,屏幕闪烁的现象 B.由于主存分配不当,偶然造成主存不够的现象 C.系统盘有问题,致使系统不稳定的现象 D.被调出的页面又立刻被调入所形成的频繁调入调出现象 6.在分页存储管理系统中,从页号到物理块号的地址映射是通过( B )实现的. A.段表B.页表 C. PCB D.JCB 7.在下述文件系统目录结构中,能够用多条路径访问同一文件(或目录)的目录结构是( D ) A.单级目录B.二级目录 C.纯树型目录D.非循环图目录 8.SPOOLing技术可以实现设备的( C )分配. A.独占B.共享 C.虚拟D.物理 9.避免死锁的一个著名的算法是( C ). A.先人先出算法B.优先级算法 C.银行家算法D.资源按序分配法 10.下列关于进程和线程的叙述中,正确的是( C ). A.一个进程只可拥有一个线程 B.一个线程只可拥有一个进程 C.一个进程可拥有若干个线程 D.一个线程可拥有若干个进程 二、判断题(选择你认为正确的叙述划√,认为错误的划×并说明原因.每题2分,共10分) 1.简单地说,进程是程序的执行过程.因而,进程和程序是一一对应的.( ) 2.V操作是对信号量执行加1操作,意味着释放一个单位资源,加l后如果信号量的值小于等于零,则从等待队列中唤醒一个进程,使该进程变为阻塞状态,而现进程继续进行.( ) 3.段页式存储管理汲取了页式管理和段式管理的长处,其实现原理结合了页式和段式管理的基本思想,即用分段方法来分配和管理用户地址空间,用分页方法来管理物理存储空间.( ) 4.在采用树型目录结构的文件系统中,各用户的文件名必须互不相同.( ) 5.用户程序应与实际使用的物理设备无关,这种特性就称作与设备无关性.( ) 答案:1.(×)改正为:进程和程序不是一一对应的. 2.(×)改正为:V操作是对信号量执行加1操作,意味着释放一个单位资源,加1后如果信号量的值小于等于零,则从等待队列中唤醒一个进程,现进程变为就绪状态,否则现进程继续进行. 3.(√) 4.(×)改正为:在采用树型目录结构的文件系统中,不同用户的文件名可以相同. 5.(√) 三、填空题(每空2分,共30分) 操作系统原理课程设计 实践报告 题目: 仿真多进程并发环境中死锁的预防、避免、检测与解除 姓名: 学院: 信息科技学院 专业: 计算机科学技术系 班级: 学号: 指导教师: 职称: 20010年4月8日 仿真多进程并发环境中死锁的预防、避免、检测与解除 摘要:在多道程序系统中,多个程序并发执行时可能造成死锁。所谓死锁是指多 个进程在运行过程中因争夺资源而造成的一种僵局。当进程处于这种僵局状态时若无外力作用,它们都将无法再向前推进,造成资源的浪费。该程序将模拟多进程并发时死锁现象的产生、避免、检测与解除。死锁避免用最著名的银行家算法,用银行家安全性算法类似的死锁检测算法来检测进程状况,又用资源剥夺法来实现死锁的解除。该程序实现操作简易,表示清晰并且形象描述多进程并发环境中死锁的预防、避免、检测与解除。 关键字:死锁;避免死锁;安全状态;银行家算法 引言:在操作系统、数据库系统以及网络通信中,由于进程并发和资源共享,当系统中资源分配顺序或者进程推进顺序不当就会造成系统死锁[1]。处于死锁状态的系统中,进程之间互相等待资源而永远不能继续向前推进,严重地影响了系统的可靠性。因而有时需要合理的对资源进行分配必要的时候加以限制保证系统安全、高效、稳定的运行。 1理论分析 1.1 死锁的概念 如果一个进程集合中的每个进程都在等待只能由此集合中的其他进程才能引发的事件,而无限期陷入僵持的局面称为死锁[2]。 1.2 产生死锁的条件: 1、互斥使用(资源独占):一个资源每次只能给一个进程使用。 2、不可强占(不可剥夺):资源申请者不能强行的从资源占有者手中夺取资 源,资源只能由占有者自愿释放。 3、请求和保持(部分分配,占有申请):一个进程在申请新的资源的同时保 持对原有资源的占有(只有这样才是动态申请,动态分配)。 4、循环等待:存在一个进程等待队列{P1,P2,…,Pn},其中P1等待P2占 有的资源,P2等待P3占有的资源,…,Pn等待P1占有的资源,形成一个进程等待环路[3]。 1.3死锁的预防 在系统设计时确定资源分配算法,保证不发生死锁。具体的做法是破坏产生死锁的四个必要条件之一。 ①破坏“不可剥夺”条件 在允许进程动态申请资源前提下规定,一个进程在申请新的资源不能立即得到满足而变为等待状态之前,必须释放已占有的全部资源,若需要再重新申请。 ②破坏“请求和保持”条件 要求每个进程在运行前必须一次性申请它所要求的所有资源,且仅当该进程所要资源均可满足时才给予一次性分配。 ③破坏“循环等待”条件 采用资源有序分配法:把系统中所有资源编号,进程在申请资源时必须严格按资源编号的递增次序进行,否则操作系统不予分配。 操作系统精髓与设计原理课后答案 第1章计算机系统概述 1.1列出并简要地定义计算机的四个主要组成部分。 主存储器,存储数据和程序;算术逻辑单元,能处理二进制数据;控制单元,解读存储器中的指令并且使他们得到执行;输入/输出设备,由控制单元管理。 1.2定义处理器寄存器的两种主要类别。 用户可见寄存器:优先使用这些寄存器,可以使机器语言或者汇编语言的程序员减少对主存储器的访问次数。对高级语言而言,由优化编译器负责决定把哪些变量应该分配给主存储器。一些高级语言,如C语言,允许程序言建议编译器把哪些变量保存在寄存器中。 控制和状态寄存器:用以控制处理器的操作,且主要被具有特权的操作系统例程使用,以控制程序的执行。 1.3一般而言,一条机器指令能指定的四种不同操作是什么? 处理器-寄存器:数据可以从处理器传送到存储器,或者从存储器传送到处理器。 处理器-I/O:通过处理器和I/O模块间的数据传送,数据可以输出到外部设备,或者从外部设备输入数据。 数据处理:处理器可以执行很多关于数据的算术操作或逻辑操作。 控制:某些指令可以改变执行顺序。 1.4什么是中断? 中断:其他模块(I/O,存储器)中断处理器正常处理过程的机制。 1.5多中断的处理方式是什么? 处理多中断有两种方法。第一种方法是当正在处理一个中断时,禁止再发生中断。第二种方法是定义中断优先级,允许高优先级的中断打断低优先级的中断处理器的运行。 1.6内存层次的各个元素间的特征是什么? 存储器的三个重要特性是:价格,容量和访问时间。 1.7什么是高速缓冲存储器? 高速缓冲存储器是比主存小而快的存储器,用以协调主存跟处理器,作为最近储存地址的缓冲区。1.8列出并简要地定义I/O操作的三种技术。 可编程I/O:当处理器正在执行程序并遇到与I/O相关的指令时,它给相应的I/O模块发布命令(用以执行这个指令);在进一步的动作之前,处理器处于繁忙的等待中,直到该操作已经完成。 中断驱动I/O:当处理器正在执行程序并遇到与I/O相关的指令时,它给相应的I/O模块发布命令,并继续执行后续指令,直到后者完成,它将被I/O模块中断。如果它对于进程等待I/O的完成来说是不必要的,可能是由于后续指令处于相同的进程中。否则,此进程在中断之前将被挂起,其他工作将被执行。 直接存储访问:DMA模块控制主存与I/O模块间的数据交换。处理器向DMA模块发送一个传送数据块的请求,(处理器)只有当整个数据块传送完毕后才会被中断。 1.9空间局部性和临时局部性间的区别是什么? 空间局部性是指最近被访问的元素的周围的元素在不久的将来可能会被访问。临时局部性(即时间局部性)是指最近被访问的元素在不久的将来可能会被再次访问。 1.10开发空间局部性和时间局部性的策略是什么? 空间局部性的开发是利用更大的缓冲块并且在存储器控制逻辑中加入预处理机制。时间局部性的开发是利用在高速缓冲存储器中保留最近使用的指令及数据,并且定义缓冲存储的优先级。 第2章操作系统概述 操作系统原理课程设计报告 系(院):计算机科学学院 专业班级: 姓名: 学号: 指导教师: 设计时间:2020.5.25——2020.5.30 设计地点: 一、课程设计目的 (4) 二、课程设计的任务和要求 (4) 三、模拟程序的描述: (5) 四、运行环境 (7) 五、算法原理 (8) 1)多级反馈队列调度算法 (13) 2)优先权调度算法 (14) 六、需求分析 (16) 七、总体设计 (17) 八、详细设计与实现[含代码和实现界面] (19) 九、主要代码分析: (26) 十、总结 (44) 一、课程设计目的 《操作系统原理》是计算机科学与技术专业的一门专业核心课程,也是研究生入学考试中计算机专业综合中所涉及的内容。该课程理论性强,纯粹的理论学习相对枯燥乏味,不易理解。通过课程设计,可加强学生对原理知识的理解。 二、课程设计的任务和要求 本次课程设计的题目是,时间片轮转调度算法的模拟实现。要求在充分理解时间片轮转调度算法原理的基础上,编写一个可视化的算法模拟程序。 具体任务如下: 1、根据需要,合理设计PCB结构,以适用于时间片轮转调度算法; 2、设计模拟指令格式,并以文件形式存储,程序能够读取文件并自动生成指令序列。 3、根据文件内容,建立模拟进程队列,并能采用时间片轮转调度算法对模拟进程进行调度。 三、模拟程序的描述: 模拟指令的格式:操作命令+操作时间 ● C :表示在CPU上计算 ●I :表示输入 ●O :表示输出 ●W :表示等待 ●H :表示进程结束 操作时间代表该操作命令要执行多长时间。这里假设I/O设备的数量没有限制,I和O设备都只有一类。 I,O,W三条指令实际上是不占有CPU的,执行这三条指令就应该将进程放入对应的等待队列(输入等待队列,输出等待队列,其他等待队列)。 参考书目: 1.[美]William Stallings,陈渝等译.操作系统-精髓与设计原理(第五版).北 京:电子工业出版社,2006 2.James L. Peterson,Operating System Concepts(Second Edition), Addison-Wesley Publishing Company Inc.,1985 3.[荷]特纳鲍姆,现代操作系统(英文版.第2版),北京,机械工业出版社, 2002 4.[美]Andrew S.Tanenbaum & Albert S.Woodhull,王鹏等译.操作系统: 设计与实现(第二版).北京:电子工业出版社,1998 5.[美]Larry L.Peterson, Bruce S.Davie著, 计算机网络系统方法(英文.第 三版), 机械工业出版社,2005 6.张尤腊,仲萃豪等,计算机操作系统,北京,科学出版社,1979 7.孙钟秀,费翔林,骆斌,谢立,操作系统教程(第三版),北京,高等教育 出版社,2003 8.汤子瀛,哲凤屏,汤小丹.计算机操作系统(修订版).西安,西安电子科技 大学出版社,2001 9.何炎祥,李飞等,计算机操作系统,北京,清华大学出版社,2006 10.陈向群,向勇等,Windows 操作系统原理(第2版),北京,机械工业出版社, 2004 11.左万历,周长林,计算机操作系统教程(第二版),北京,高等教育出版社, 2005 12.孟庆昌,操作系统,北京,电子工业出版社,2004 13.蒋静,徐志伟,操作系统-原理.技术与编程,北京,机械工业出版社,2004 14.张尧学,史美林.计算机操作系统教程(第2版).北京:清华大学出版社, 2000 15.盂静.操作系统原理教程.北京:清华大学出版社,2001 16.冯耀霖,杜舜国,操作系统(第2版),陕西,西安电子科技大学出版社, 1996 17.李学干,计算机系统结构(第三版),陕西,西安电子科技大学出版社,2000 18.曾平,曾慧.操作系考点精要与解题指导.北京,人民邮电出版社,2002 19.徐甲同,网络操作系统,吉林,吉林大学出版社,2000 20.David A. Rusling,The Linux Kernel,北京,机械工业出版社,2000 21.陈莉君,Linux操作系统内核分析,北京,人民邮电出版社,2000 操作系统原理课程设计 ——银行家算法模拟 指导老师:周敏唐洪英杨宏雨 杨承玉傅由甲黄贤英 院系:计算机学院计算机科学与技术班级:0237-6 学号:2002370609 姓名:刘洪彬 同组者:杨志 时间:2005/1/10---2005/1/14 银行家算法模拟 一、设计目的 本课程设计是学生学习完《计算机操作系统》课程后,进行的一次全面的综合训练,通过课程设计,让学生更好地掌握操作系统的原理及实现方法,加深对操作系统基础理论和重要算法的理解,加强学生的动手能力。 二、设计要求 银行家算法是避免死锁的一种重要方法,本实验要求用高级语言编写和调试一个简单的银行家算法程序。加深了解有关资源申请、避免死锁等概念,并体会和了解死锁和避免死锁的具体实施方法。 从课程设计的目的出发,通过设计工作的各个环节,达到以下教学要求:两人一组,每组从所给题目中任选一个(如自拟题目,需经教师同意),每个学生必须独立完成课程设计,不能相互抄袭,同组者文档不能相同; 设计完成后,将所完成的工作交由老师检查; 要求写出一份详细的设计报告。 三、设计内容 编制银行家算法通用程序,并检测所给状态的系统安全性。 1)银行家算法中的数据结构 假设有n个进程m类资源,则有如下数据结构: 可利用资源向量Available。这是一个含有m个元素的数组,其中的每一个元素代表一类可利用的资源数目,其初始值是系统中所配置的该类全部可用资源的数目,其数值随该类资源的分配和回收而动态地改变。Available[j]=K,则表示系统中现有Rj 类资源K个。 最大需求矩阵Max。这是一个n*m的矩阵,它定义了系统中n个进程中的每一个进程对m类资源的最大需求。如果Max[i,j]=K,则表示进程i需要Rj类资源的最大数目为K。 分配矩阵Allocation。这也是一个n*m的矩阵,它定义了系统中每一类资源当前已分配给没一进程的资源数。如果Allocation[i,j]=K,则表示进程i 当前已分得Rj类资源的数目为K。 需求矩阵Need。这也是一个n*m的矩阵,用以表示每一个进程尚需的各类资源数。如果Need[i,j]=K,则表示进程i还需要Rj类资源K个,方能完成其任务。 第2章操作系统的界面 (1) 请说明系统生成和系统引导的过程。 解: 系统的生成过程:当裸机启动后,会运行一个特殊的程序来自动进行系统的生成(安装),生成系统之前需要先对硬件平台状况进行检查,或者从指定文件处读取硬件系统的配置信息,以便根据硬件选择合适的操作系统模块组,比较重要的信息通常有:CPU类型、内存大小、当前关联设备的类型和数量以及操作系统的重要功能选项和参数。按照这些信息的指示,系统生成程序就可以正确地生成所需的操作系统。 系统引导的过程:系统引导指的是将操作系统内核装入内存并启动系统的过程。主要包括初始引导、内核初始化、全系统初始化。初始引导工作由BIOS完成,主要完成上电自检,初始化基本输入输出设备,载入操作系统内核代码等工作。内核被载入内存后,引导程序将CPU控制权交给内核,内核将首先完成初始化功能,包括对硬件、电路逻辑等的初始化,以及对内核数据结构的初始化,如页表(段表)等。全系统初始化阶段要做的就是启动用户接口程序,对系统进行必要的初始化,使系统处于等待命令输入状态。 (2) 操作系统具有哪些接口?这些接口的作用是什么? 解: 操作系统为用户提供的接口有图形接口、命令接口和程序接口几种形式。 操作系统包括三种类型的用户接口:命令接口(具体又可分为联机命令接口与脱机命令接口)、程序接口及图形化用户接口。其中,命令接口和图形化用户接口支持用户直接通过终端来使用计算机系统,而程序接口则提供给用户在编制程序时使用。 (3) 请说明操作系统具有的共性服务有哪些不同类别,这些类别分别用于完成什么功能? 解:所有的操作系统都通过一些基本服务来帮助用户简单便捷地使用计算机各类资源,它们包括以下几个类别: 1.控制程序运行:系统通过服务将用户程序装入内存并运行该程序,并且要控制程序 在规定时间内结束。 2.进行I/O操作:用户是不能直接控制设备的,只能通过操作系统与外部设备进行交 互,由系统调用将结果显示在屏幕上或交给用户。 3.操作文件系统:为了保证实现“按名存取”,文件系统应该为用户提供根据文件名 来创建、访问、修改、删除文件的方法,以确保文件数据的安全可靠以及正确存取。 4.实现通信:操作系统需要提供多个程序之间进行通讯的机制,来控制程序的执行顺 序。 5.错误处理:操作系统通过错误处理机制,以便及时发现错误并采取正确的处理步骤, 避免损害系统的正确性和统一性。 (4) 系统调用的用途是什么? 解: 通常,在操作系统内核设置有一组用于实现各种系统功能的子程序(过程),并将它们提供给用户程序调用。每当用户在程序中需要操作系统提供某种服务时,便可利用一条系统调用命令,去调用所需的系统过程。这即所谓的系统调用。系统调用的主要类型包括: 1.进程控制类,主要用于进程的创建和终止、对子进程结束的等待、进程映像的替换、 进程数据段大小的改变以及关于进程标识符或指定进程属性的获得等; 2.文件操纵类,主要用于文件的创建、打开、关闭、读/写及文件读写指针的移动和 《操作系统原理》课程设计 课题名称:进程调度算法 姓名: 班级: 学号: 课程设计起止时间:2005年1月2日——2005年1月7日指导教师:成绩: 课程设计任务书 进程调度算法 一、设计说明 该程序实现了进程的创建,且对该进程队列进行动态优先权抢占式和时间片轮转算法的调度。 二、详细设计 1. 流程图 2. 程序运行环境 Turbo C 2.0 3. 变量的名称、作用及含义说明 链表结构process,整型变量name表示进程名称,整型变量prior表示优先数,整型变量needtime表示需要执行时间,整型变量CPUtime表示CPU执行时间,整型变量runtime表示进程执行时间,整型变量state表示运行状态(1:ready, 2:execute, 3:finish)。 4. 各主要模块的功能表述 [ 子函数] ①Createp() 用来创建新进程,其中的整型变量n表示需要创建的进程个数; ②PrintP1(h) 用来打印输出时间片轮转算法的创建进程和运行进程的各变量值; ③Finish(h) 用来判断某个进程是否执行完; ④Find(h) 用来查找该进程队列中优先数最大的进程; ⑤PrintP2(h) 用来打印输出动态优先权抢占式算法的创建进程和运行进程的各变量值; ⑥ExecuteP_prio(h) 执行动态优先权抢占式进程调度算法; ⑦ExecuteP_time(h) 执行时间片轮转进程调度算法; [ 主函数] main()中使用字符变量select表示a和b中的一个字母,整型变量num表示1至3中的一个数,用双层switch语句实现各模块功能。 5.程序源代码 #include 机械系统设计 课程作业 打孔机的设计) 一、设计任务书. (1) 二、确定总共能(黑箱) (3) 三、确定工艺原理 (3) (一)机构的工作原理: (3) (二)原动机的选择原理 (3) (三)传动机构的选择和工作原理 (4) 四、工艺路线图 (5) 五、功能分解(功能树) (5) 六、确定每种功能方案,形态学矩阵 (6) 七、系统边界 (8) 八、方案评价 (8) 九、画出方案简图 (9) 十、总体布局图 (11) 十一、主要参数确定 (12) 十二、循环图 (17) 一、设计任务书 表1 、确定总共能(黑箱) ~220V 噪声 发热 图1 三、确定工艺原理 (一)机构的工作原理: 该系统由电机驱动,通过变速传动将电机的 1450r/min 降到 主轴的2r/min ,与传动轴相连的各机构控制送料,定位,和 进刀等工 艺动作,最后由凸轮机 通过齿轮传动带动齿条上下 平稳地运动,这样动力头也就能带动刀具平稳地上下移动从 而保证了较高的加工质量。 (二)原动机的选择原理 (1)原动机的分类 原动机的种类按其输入能量的不同可以分为两类: A. —次原动机 此类原动机是把自然界的能源直接转变为机械能,称为一 次原动机。 属于此类原动机的有柴油机,汽油机,汽轮机 和燃汽机等。 B.二次原动机 此类原动机是将发电机等能机所产生的各种形态的能量转 变为机械能,称为二次原动机。 属于此类原动机的有电动机, 液压马达,气压马达,汽缸和液压缸等。 (2) 选择原动机时需考虑的因素: 1:考虑现场能源的供应情况。 2:考虑原动机的机械特性和工作制度与工作相匹配。 3:考虑工作机对原动机提出的启动,过载,运转平稳等方 面的要求。 被加工工件 黑箱 有孔的工件 地理信息系统2010年考研试题 一名词解释(40分共8个小题每题5分) 1、对象模型:也称要素模型,将研究的整个地 理空间看成一个空域,地理现象和空间实体作为独立对象分布在该空域中。24页 2、关系模型:它是将数据的逻辑结构归结为满 足一定条件的二维表,这种表称为关系。 3、误差:表示数据与其真值之间的差。84页 4、层次分类编码法:是按照分类对象的从属和 层次关系为排列顺序的一种代码。它的优点是能明确表示出分类对象的类别,代码结构有严格的隶属关系。64页 5、网格GIS:网格被称为第三代互联网应用,它是把整个互联网整合成一台巨大的超级计算机,能实现各种资源的全面共享。 6、邻接关系:它是指空间图形中同类元素之间 的拓扑关系。 7、TIN:是专为产生DEM数据而设计的一种采样表示系统 8、ComGIS:是面向对象技术和组件式软件在GIS软件开发中的应用。(186页) 二简答题(70分,每题10分) 1、GIS是解决什么问题的? 答:“有用的空间信息和知识”可归纳为位置、条件、趋势、模型和模拟等五个基本问题,GIS的价值和作用就是通过地理对象的重建,利 用空间分析工具,实现对这五个基本问题的求解。 地理信息系统包括以下五项基本功能:(1)数据采集与输入(2)数据编辑与更新(3)数据存储与管理 (4)空间查询与分析(5)数据显示与输出2、什么是矢量数据结构?其特点是什么? 答:适量数据结构:通过记录空间对象的坐标 及空间关系表达空间对象的几何位置。 矢量结构的特点:定位明显,属性隐含。 3、空间数据的获取方式有哪些? 答:(1)数字化仪矢量化(2)扫描数字化(3)遥感数据获取(4)外业测量数据获取(5)全球定们系统数据获取(6)数字摄影测量数据获取(7)已有数据的获取与转换4、什么是空间数据压缩?空间数据压缩的方 法? 答:空间数据压缩是指从取得的数据集合中抽取一个子集,这个子集作为一个新的信息源,在规定的精度范围内最好地逼近原集合,而又取得尽可能大的压缩比。 (1)栅格数据压缩:栅格数据压缩是指栅格数据量的减少,这与栅格数据结构密切相关。其压缩方法有游程长度编码、链码、块状编码、四叉树编码等 (2)曲线矢量数据压缩:①间隔取点法:每隔一规定的距离取一点,舍去那些离已选点较近的点,但首末点必须保留。 ②垂距法,垂距法是按垂距的限差选取符合或超过限差的点。 ③偏角法,是按偏角的限差选取符合或超过限差的点。 ④特征点筛选法,是通过筛选抽取曲线特征点,并删除非特征点以实现数据压缩。 5、试述DEM的建立方法?以及包含的模型有哪些? 答:(1)DEM数据源(2)DEM数据采集方法(3)数据摄影测量获取DEM(4)DEM的空间插值方法 DEM的主要表示模型:规则格网模型、不规则三角网模型、等高线模型。 6、GIS工程的特点?GIS工程的建设过程?(202页) 答:GIS工程的主要特点有以下几个方面: ⑴空间数据的管理在工程中处于核心地 位 ⑵系统体系结构相对复杂 ⑶系统维护工作量大 ⑷系统更新速度快 ⑸应用领域广阔 GIS工程的建设过程: ⑴工程定义阶段 ⑵工程设计阶段 ⑶数据工程阶段 ⑷工程实施阶段 ⑸工程的评价与维护阶段 7、试述ArcCatalog主要功能249页 答:ArcCatalog数据管理功能机械系统设计大作业
习题答案-Linux操作系统原理实践教程-崔继-清华大学出版社
《操作系统精髓与设计原理·第六版》中文版标准答案
操作系统原理期末试卷10套含答案7
操作系统原理课程设计实践报告
操作系统精髓与设计原理课后答案
操作系统原理课程设计报告
(完整word版)操作系统参考书目
操作系统原理课程设计
操作系统原理与实践教程(第二版)第2章习题答案
《操作系统原理》课程设计
打孔机的结构原理设计(机械系统设计大作业)
河北师大地理信息系统原理与实践考研真题及答案
相关主题
文本预览