高速阻尼器试验系统及试验精度控制研究
鲁亮1 翁大根1 曹文清1 朱晓兵2 支晓阳2 陈亮2
(1 同济大学结构工程与防灾研究所,上海200092;2 无锡市海航电液伺服系统股份有限公司,江苏 214027)
摘要:本文对2000KN 高速阻尼器试验系统的组成、特点、功能进行了介绍,特别是试验台架结构。分析了在进行粘滞阻尼器试验时影响试验数据精度的因素,这些因素包括液压系统加载能力、加载台架的刚度、试件安装间隙和数据通道之间的采集时差等,并对这些因素进行了数值模拟,提出解决措施。 关键词:电液伺服,阻尼器,试验精度,试验台架,试验精度
High-speed Damper Testing System and Research on the Test
Precision Control
L. Lu 1 D. G. Weng 1 W. Q. Cao 1 X. B. Zhu 2 X. Y. Zhi 2 L. Chen 2
( 1 Research Institute of Structural Engineering and Disaster Reduction, Tongji University, Shanghai 200092, China; 2 Wuxi Haihang
Electro-hydraulic Servo system Co. Ltd., Jiangsu 214027, China)
Abstract: Mechanical composing, features and main function of a 2000kN high-speed damper testing system are introduced, especially the structure of the loading frame. This testing system is an Electro-hydraulic Servo Load System. Various factors influenced the test precision are analyzed, which include the capacity of power supply, stiffness of the loading frame, installation gaps of specimen and the time gap of DAS channels, etc. Some factors affect the data precision are numerically simulated while doing a viscous damper, and several solutions about precision control are proposed.
Keywords :Electro-hydraulic Servo Test; Damper; Precision Control; Loading Frame
收稿日期:
基金项目:国家自然科学基金资助项目(51178354) 联系作者,E-mail :luloes@https://www.doczj.com/doc/8716549582.html,
引言
随着结构控制技术在建筑和桥梁工程中的应用,各类阻尼器的使用越来越多,技术越来越成熟。大吨位的速度型阻尼器的应用范围也随之扩大,为了对各种材料大吨位阻尼器性能进行测试就必须研究相应的大出力、大速度阻尼器试验系统[1-3]。
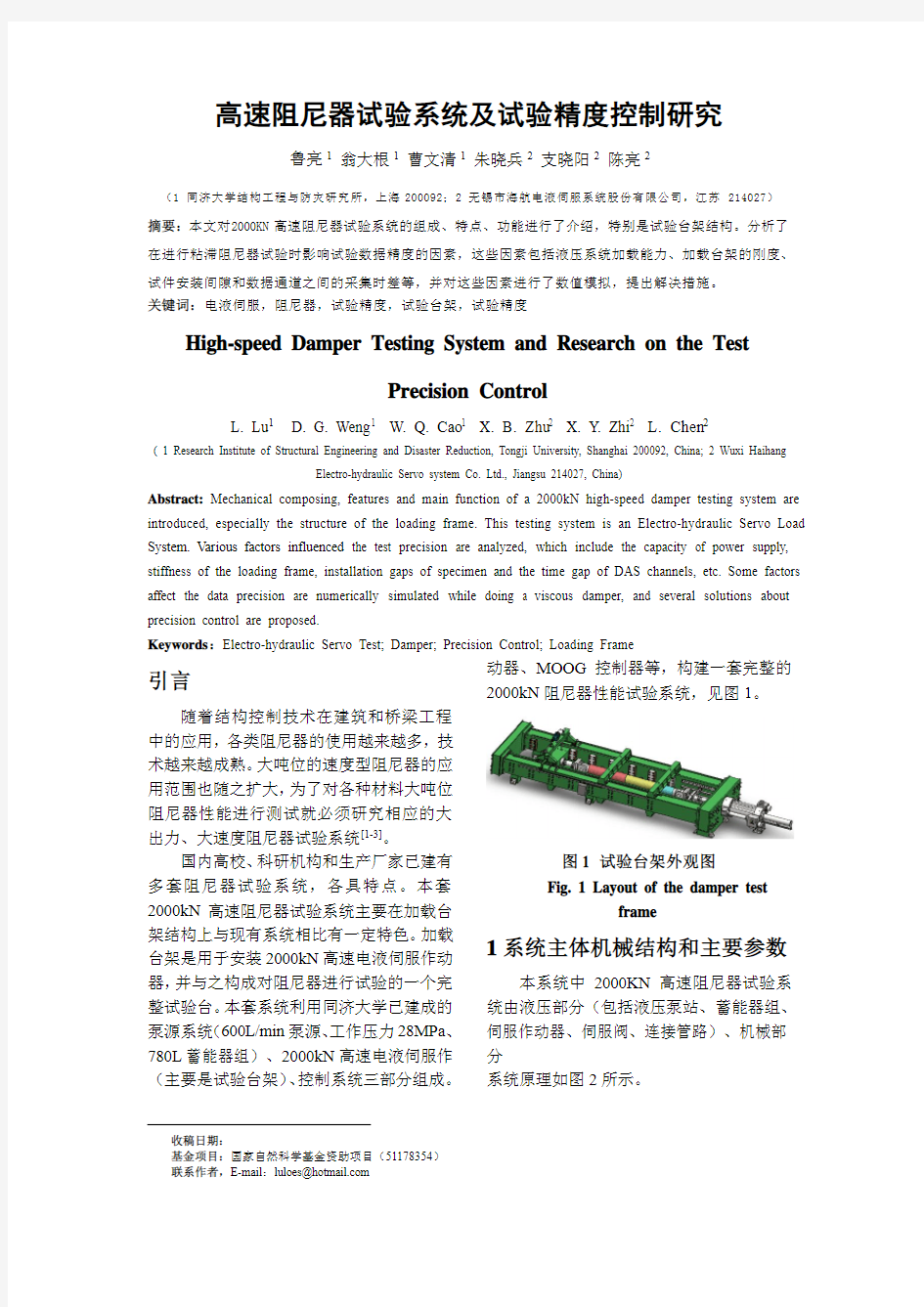
国内高校、科研机构和生产厂家已建有多套阻尼器试验系统,各具特点。本套2000kN 高速阻尼器试验系统主要在加载台架结构上与现有系统相比有一定特色。加载台架是用于安装2000kN 高速电液伺服作动器,并与之构成对阻尼器进行试验的一个完整试验台。本套系统利用同济大学已建成的泵源系统(600L/min 泵源、工作压力28MPa 、780L 蓄能器组)、2000kN 高速电液伺服作动器、MOOG 控制器等,构建一套完整的2000kN 阻尼器性能试验系统,见图1。
图1 试验台架外观图
Fig. 1 Layout of the damper test
frame
1系统主体机械结构和主要参数
本系统中2000KN 高速阻尼器试验系统由液压部分(包括液压泵站、蓄能器组、伺服作动器、伺服阀、连接管路)、机械部分
(主要是试验台架)、控制系统三部分组成。系统原理如图2所示。
图 2 系统原理图
Fig. 2 Schematic diagram of the test
system
1.1 系统机械结构参数
2000kN高速阻尼器试验系统的加载台架采用多组方键、键槽,动衡梁,加载动横梁,主横梁和两根大横梁形成水平力封闭机构,两根大横梁上设置1000mm间距键槽,动横梁上装有升降机可使加载动横梁上下移动,动横梁选用不同位置高度的键槽,即可适应不同长度的试件。
2000kN高速电液伺服作动器固定在主横梁侧面,高速作动器上的法兰用螺栓固定联接在主横梁上,机械结构见图3。
图3 加载台架
Fig. 3 Layout of the loading frame
加载台架技术参数如下:
(1)加载台架为卧式结构,且为自平衡受力体系,整体连接无间隙;
(2)加载台架能测试的试件长度0.4 m~5m,台架内净宽度1500mm;
(3)加载台架能承受5000kN拉、压载荷;
(4)高速作动器的水平出力:F(动载拉压)=±2000kN、F(静载拉压)=±2800kN;
(5)高速作动器的最大行程±600mm,作动器大速度1.2m/s;
(6)加载台架动横梁、固端梁、台架加载纵梁的最大荷载变形≤1/1500,可以最大承受5000kN的静载荷。
1.2 试件和载荷参数
2000kN高速阻尼器试验系统所能测试试件的主要技术参数如下:
(1)最大动载荷:2000kN;
(2)试件最大长度:0~5700mm;
(3)试件最大截面:1600mm×720mm;
(5)试件最大变形(活塞加载行程):1200mm。
2000kN高速阻尼试验系统的载荷参数如下:
(1)最大动载荷:2000kN;
(2)最大位移:±600mm;
(3)最大速度:1.2m/s;
(4)加载频率:0~5Hz;
(5)加载波形:正弦波、三角波、拍波、方波、斜波、随机波、地震波。
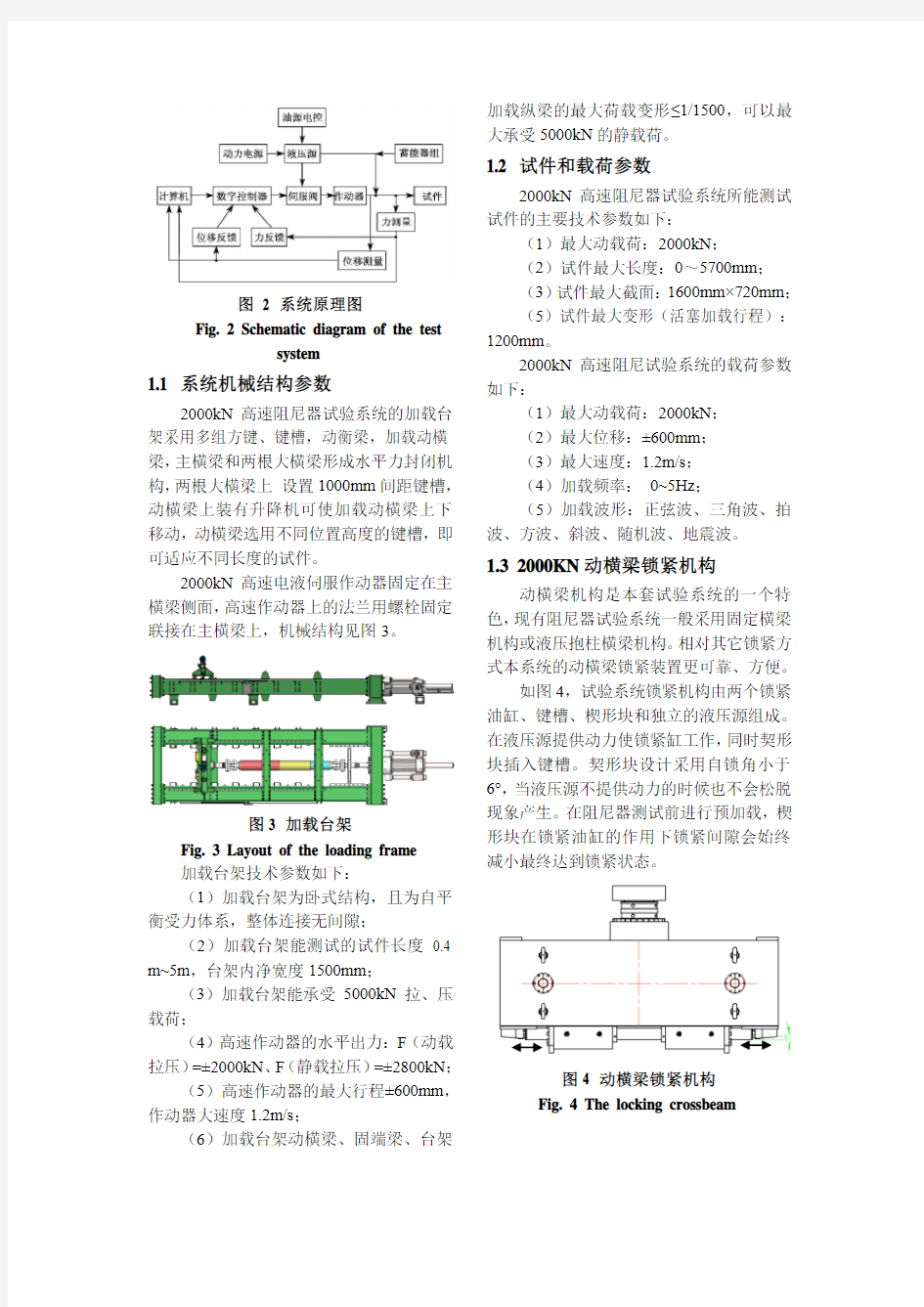
1.3 2000KN动横梁锁紧机构
动横梁机构是本套试验系统的一个特色,现有阻尼器试验系统一般采用固定横梁机构或液压抱柱横梁机构。相对其它锁紧方式本系统的动横梁锁紧装置更可靠、方便。
如图4,试验系统锁紧机构由两个锁紧油缸、键槽、楔形块和独立的液压源组成。在液压源提供动力使锁紧缸工作,同时契形块插入键槽。契形块设计采用自锁角小于6°,当液压源不提供动力的时候也不会松脱现象产生。在阻尼器测试前进行预加载,楔形块在锁紧油缸的作用下锁紧间隙会始终减小最终达到锁紧状态。
图4 动横梁锁紧机构
Fig. 4 The locking crossbeam
2控制器和控制软件
2.1 控制器简介
2000kN高速阻尼器试验系统的控制器采用“为操作者设计”的概念可配置为1至32伺服测试通道(模块配置)。可以扩展多种信号输入输出卡,调理卡等。可以配置多站控制器MCU。机柜也可以扩展UPS,网络路由器等集成MOOG公司独特的带“阻尼”功能控制算法实现闭环控制,非常容易调参和运行,特别在高频条件下,具有极好的相关性,大大降低测试设置时间。可以完成力、位移和加速度控制。
控制器提供外接电阻双向旁路标定功能,提供多路信号输入(力,位移,加速度等)和外部模拟输入端,直接驱动伺服阀±100mA/±10V,电流驱动或电压驱动,自带监控模拟量输出,可以将任意内部变量输出。
2.2 控制软件简介
2000KN高速阻尼器试验系统的控制软件为MOOG-MITS 集成测试软件包,主要功能为传感器参数设定、试验控制参数设定、试件安装、试验谱定义和编辑、控制方式选择等。
为实现高速阻尼器试件的全曲线测量,本软件设计了力控和位控两种控制方式,操作人员可以在任何时间进行两种控制模式的切换。在作静力试验时,对于试件屈服前即曲线的前段采用力控模式,在加载过程中同时跟踪位置的变化及刚度的变化,当接近于屈服点时,由力控模式切换平滑切换为位控模式,完成全曲线测量。切换过程中,软件自动对控制参数做全面调整。由于控制系统切换速度很快,液压系统由于惯性还来不及反应,而控制系统已完成了参数转换,故此在切换过程中系统的抖动很小,可达到满量程的1%。
在加载过程中,尤其是静力加载过程,不仅要求各通道同时到达最大试验载荷值,而且要求在加载过程中通道荷载保持一定的同步性。为解决这个问题,该软件实时检测各通道加载速度,并对加载速度进行调整,使各通道同步加载。类似的方法,该软件也解决了频率和相位的同步问题。
3 阻尼器试验结果精度控制方法
本套2000kN高速阻尼器试验系统可以完成包括粘滞阻尼器、粘弹性阻尼器、金属阻尼器、防屈曲约束支撑等在内的各种耗能装置的测试。
在试验过程中,有时得到的试验曲线与理论计算曲线差别较大,往往难以合理解释。经分析研究和不断试验,作者认为除试件本身性能外,影响阻尼器试验精度的主要因素有以下几个方面:
(1)试验系统的加载能力不足;
(2)加载台架的刚度偏小;
(3)试件安装间隙过大;
(4)数据采集信号不佳或通道间信号
不同步等。
下面以粘滞阻尼器试验为例(见图5)对影响试验结果精度的各种因素加以分析。
图5 测试中的油阻尼器
Fig. 5 Viscous damper under testing
测试时,作动器给阻尼器施加的强制位移和速度为
X=Asin(2πft)(1)
V=2πfAcos(2πft)(2) 其中:
A:波形最大幅值,m
f:加载频率,Hz
粘滞阻尼器出力与加载速度的关系为
F=C?sign(V)|V|α(3) 其中:
F:阻尼力,kN
C: 阻尼系数,kN?m/s
V: 阻尼器活塞相对缸体的运动速度,m/s
α: 阻尼指数
以一个C=2050 kN?m/s的最大设计阻尼力为2000kN的粘滞阻尼器为例,可以按照公式(3)得到在不同振幅、不同频率和不同阻尼指数下的阻尼力-活塞位移滞回曲线,图6为不同振幅下的滞回曲线,图7为不同频率下的滞回曲线,图8为不同阻尼指数下的滞回曲线。
图6 不同幅值下的滞回曲线(f=0.1Hz,
α=0.5)
Fig. 6 Hysteretic curves with different amplitudes (f=0.1Hz, α=0.5)
图7 不同频率下的滞回曲线(A=20mm,
α=0.5)
Fig. 7 Hysteretic curves with different frequencies (A=20mm, α=0.5)
图8 不同阻尼指数下的滞回曲线
(A=20mm,f=0.1Hz)
Fig. 8 Hysteretic curves with different
damper indexes (A=300mm, f=0.1Hz)
在设备调试和正式测试过程中,采集到的一些力-位移滞回曲线如图9所示,发现这些曲线与理论曲线相差较大。从加载系统、测试系统和阻尼器本身进行分析发现,除了阻尼器产品本身性能外,测试温度对测试结果影响较大,但也可归结于产品本身性能,需要按规程《建筑消能阻尼器》JG/T 209-2012规定的温度范围进行测试,在试件温度升高后应采取降温措施后再进行后续试验。
(a)
(b)
(c)
图9 试验得到的部分不佳曲线
Fig. 9 Poor curves obtained from some tests 经分析和测试,除去产品本身性能外,影响最终测试精度的因素为:
(1)设备加载能力。包括蓄能器储能值、伺服阀流量、管道阻尼、泵站能力等。
(2)加载台架的刚度。刚度越小对测试结果影响越大。
(3)试件安装间隙。包括螺栓连接间隙、销轴与试件之间的间隙、销轴与连接耳座之间的间隙等。
(4)控制信号或反馈信号精度不佳,曲线有毛刺。
(5)数据采集时,力和位移信号不同步,形成相位差。
下面以一个C=2050 kN?m/s的最大设计阻尼力为2000kN的粘滞阻尼器为例,就以上各种因素进行模拟再现,并给出一些建议处理措施。
3.1 设备能力对测试精度的影响
设备能力不足主要表现为达不到液压系统设计时的最大速度、最大荷载或持时性能等。在进行阻尼器30周疲劳性能试验时,往往后几圈作动器速度上不去,见图9(a)所示,检查表明测试供能已超过蓄能器储能值。
按经验,设备的试验能力往往小于系统方案设计阶段的理论计算值,主要是因为在理论计算时只考虑部件性能指标,而系统综合性能一般劣于理想状态。
供应商在产品出厂前应对产品反复、大强度对产品进行测试和磨合,得到一张可靠的产品性能表,否则就需要试验技术人员不断测试、积累经验来确认性能指标,在试验时对系统的性能做到心中有数。
3.2 加载台架刚度对测试精度的影响
阻尼器加载台架承受高速动载、荷载吨位大,其强度、刚度甚至动力特性对试验精度影响很大[4],同济大学装备的本套试验台架按500吨静载能力设计进行200吨阻尼器试验就是基于这个考虑。
一般此类台架对纵向刚度的设计要求为整体变形为在最大载荷下不超过5‰。对一个长度5米的最大阻尼力为2000kN的阻尼器进行不同刚度加载台架滞回曲线的数值模拟,台架最大变形分别取0‰、5‰、10‰、20‰,模拟结果见图10。图10表明刚度越小,试验结果曲线越畸变,设计要求的数值5‰比较合理。
模拟结果还表明,台架刚度越小,滞回曲线越向一个方向倾斜,实际试验结果表明很难得到竖向对称的试验曲线,见图9,说明加载台架变形是滞回曲线倾斜的原因之一。
图10 不同台架刚度下滞回曲线模拟
(A=300mm, f=0.1Hz)
Fig. 10 Simulation of hysteretic curves
under different test frame stiffness
(A=300mm, f=0.1Hz)
3.3 试件安装间隙对测试精度的影响
阻尼器通过两端耳轴与连接座相连,台架移动横梁与立柱相连,沿阻尼器受力途径上有6个以上的间隙来源,而过小的间隙配合使得阻尼器的安装变得很困难。为解决这个矛盾,需要从结构构造入手,同济大学本套设备采用的动横梁插销式固定方法很好地消除了动横梁与立柱之间的间隙。
销轴安装可以考虑采用螺栓压紧式,而不是穿孔式安装,也可以消除一半以上的间隙。
间隙的存在影响试验结果,见图9(a)(b),处理数据时会低估阻尼器的有效阻尼系数。对1mm,2mm间隙的数值模拟见图11,表明加载幅值越小,试验结果受到安装间隙的影响越大。
图11 模拟间隙对试验滞回曲线的影响
(A=20mm, f=0.1Hz)
Fig. 11 Simulation of installation gaps on
hysteretic curves (A=20mm, f=0.1Hz)
3.4 控制器和数据采集系统(DAS)对测试精度的影响
控制指令信号的精度与控制系统和液压系统有关,需经过测试、标定以满足精度要求。数据采集信号的精度与传感器、数据采集系统有关。指令信号和采集信号的精度均影响试验结果精度,表现为偏差和毛刺。经验表明,一般成熟试验系统有精度保证。
在设备调试过程中,曾发现数据采集系统的荷载和位移信号不同步情况,经排查采取措施后消除。
对力和位移通道信号不同步情况(即存在相位差)进行了数值模拟,模拟结果见图12,表明在进行粘滞阻尼器试验时如果滞回环向一边倾斜要先检查力、位移采集信号是否同步。有些测试系统采用外置采集仪的方法予以解决。
4 结论
本文介绍了同济大学新配置的2000KN 高速阻尼器试验系统,希望和同行进行交流与合作。分析了影响阻尼器测试精度的各种因素,并进行了数值模拟,提出控制措施。
图12 采集信号时差对试验滞回曲线的影
响(A=20mm, f=0.1Hz)
Fig. 12 Effects of time gap of DAS on
hysteretic curves (A=20mm, f=0.1Hz)
参考文献:
[1]王晓斌,刘银水,大型液压阻尼器试验台液压
系统的设计[J],液压与气动,2009(11):44-46 WANG Xiao-bin, LIU Yin-shui, Design of the Hydraulic Power for a Large-scaled Test Rig for Hydraulic Damper [J], CHINESE HYDRAULICS AND PNEUMATICS, 2009(11): 44-46 (in Chinese)
[2]蒋华戈,闫维明,李力等,3000kN电液伺服阻
尼器试验系统组成与应用[J],结构工程师,2011年1月第27卷增刊:22-25
JIANG Huage, YAN Weiming, LI Li, etc.
Composing and Application of the 3000kN Electric-hydraulic Servo Damper Testing System [J], Structural Engineer, Jan. 2011, V ol.27, Supple: 22-25 (in Chinese)
[3]液压阻尼器电液伺服试验台的研究[R]. 华中
科技大学,2007,1.
Research on the Electro-Hydraulic Servo Test Bed of the Hydraulic Damper [R]. Huazhong University of Science of technology. 2007. 1 (in Chinese).
[4]丁建华,欧进萍,油缸孔隙式粘滞阻尼器理论
与性能试验[J],世界地震工程,2001,17(1):30-35
Ding J H, Ou J P, Theoretical Study and Performance Experiment for Cylinder-with- Holes Viscous Damper. World Information on Earthquake Engineering [J]. 2001, 17(1):30-35 (in
Chinese).
人力资源管理系统
一. 引言 (1) 1.1编写目的 (1) 1.2项目背景 (1) 1.3定义 (1) 1.4项目简介 (1) 1.5操作系统 (1) 1.6参考资料 (2) 二.测试范围 (2) 三.测试策略 (3) 3.1 测试完成标准 (3) 3.2 测试类型 (3) 功能测试 (3) 性能测试 (4) 用户界面(UI)测试 (4) 安全性与访问控制测试 (5) 兼容性测试 (6) 回归测试 (6) 测试实施阶段 (7) 四.测试计划 (7) 4.1测试阶段 (7) 4.2测试进度 (8) 4.3测试软件 (9) 4.4测试环境 (10) 五.测试项目说明 (10) 5.1单位测试 (10) 5.2测试用例 (15) 5.3安全性与访问控制测试 (23) 5.4兼容性测试 (23) 5.5 回归测试 (23) 六.报道总结 (24)
一.引言 1.1 编写目的 根据软件的功能及结构设计出相应的测试用例,目的在于尽可能发现程序中的存在的错误,并加以改正,以达到减低系统运行的故障,使交付到用户手中的系统是一个尽可能安全的、可靠的和有效地系统。本文档将为测试人员提供测试用例,对测试人员进行测试指导,使测试工作顺利进行。 1.2 项目背景 小组名称:ABC小组 项目名称:人力资源管理系统 1.3 定义 人力资源管理系统 1.4项目简介 1.4.1平台:主要使用.net平台用来完成人力资源管理系统。 1.4.2功能:本系统为员工、部门经理和管理员提供职工和 部门信息的填加,修改和删除功能,包括职工档案、员工履历、员工合同、部门名称、部门经理等,可以记录奖惩情况,包括获奖人员、奖惩时间、奖惩内容等,并能够维护和查询教育培训信息,最后还可以让系统管理员进行后台管理,包括组织管理、安全控制。 1.5操作系统:
第22卷第6期2000年12月 武汉汽车工业大学学报 JOURNA L OF W UH AN AUT OM OTI VE PO LY TECH NIC UNI VERSITY V ol.22N o.6 Dec.2000 文章编号:10072144X(20000620022204 汽车减振器阻尼系数与悬架系统阻尼比的匹配 韦勇1,阳杰2,容一鸣2 (1.柳州五菱汽车有限责任公司技术中心,广西柳州545007;2.武汉汽车工业大学机电工程学院,湖北武汉430070 摘要:阐述了双轴汽车减振器阻尼系数与悬架系统阻尼比匹配设计的原则,论述了悬架减振器 外特性的匹配设计要求和设计方法,并对某实际车型进行了减振器阻尼系数与悬架系统阻尼比匹 配分析及改进设计。通过道路试验验证了改进设计的结果是可行的。 关键词:减振器;汽车悬架;阻尼比匹配 中图法分类号:U463.33文献标识码:A 汽车悬架动力学表明,地面对悬架系统的激振力等于悬架质量的惯性力和非悬架质量的惯性力之和。车轮动载(激振力又决定了车轮的接地性能,它是汽车行驶安全性的重要尺度。显然,在悬架系统中配置恰当的减振器,才能有效地抑制车身振动,保证良好的平顺性及安全性。
1阻尼匹配的原则 根据振动理论和工程经验,悬架阻尼的匹配关系由式(1确定: ξ=C 2Km =0.2~0.45(1式中,ξ为悬架系统阻尼比;C为悬架减振器的等效阻尼系数 (NsΠm;K为悬架刚度(NΠm; m为悬架质量(kg。当减振器不是垂直安装时,要考虑安装角的影响。 悬架中的弹性元件在支承车身质量的同时,还可缓和路面产生的振动,而减振器起抑制振动的作用。缓冲和抑振是矛盾着的两个方面,它们是在保证车辆和乘员安全的正常运行条件下统一起来的,这就是悬架阻尼必须匹配设计的依据。ξ值较大时,能迅速减振,但不适当地增大ξ值会传递较大的路面冲击,甚至使车轮不能迅速向地面回弹而失去附着力和对激励的缓冲能力;ξ值较小时,振动持续时间变长,又不利于改善舒适性。 一般说来,压缩行程时的悬架阻尼比要小于复原行程,因为在压缩行程,应尽量减小减振器对地面冲击的传递能力,以便充分利用弹性元件的缓冲作用,如果不适当地选择了高系数值,就相当于过分增大了悬架刚度,使车辆的平顺性变坏。在确定了ξ值之后,可由式(1确定减振器的阻尼系数。因此,确定ξ值是减振器设计的原始技术条件。 收稿日期:2000209218. 作者简介:韦勇(19672,男,广西柳州人,柳州五菱汽车有限责任公司工程师. 2悬架减振器非线性外特性的规律化和量化问题 众所周知,被动悬架可行性设计区理论规定了悬架弹性元件和阻尼元件的线性制约关系或匹配关系[1]。在解决悬架阻尼系数的匹配问题时,必须解
电性能测试报告Electronic Performance Test Report 拟制 (Tested by) 黄秋霞 (Qiuxia Huang) 日期 (Date) 2015-10-16 审核 (Approv ed by) Marey 日期 (Date)
目录 1 概述 (3) (Summary) 2 测试地点、时间、人员 (3) (Test place, Time, Personnel) 3 测试引用标准 (3) (Guide) 3.1 技术指标要求 (3) (Technical Norm Requirement) 3.2 测试方法 (3) (Test Criterion) 4 测试设备 (3) (Test Equipment) 5 结论 (3) (Test Result) 6 问题报告 (3) (Problem Report) 7 测试内容和结果 (4) (Test Items and Result) 7.1 常温环境电气性能测试 (4) (Electronic performance Test at Normal Temperature) 7.2 高温环境电气性能测试 (5) (Electronic performance Test at High Temperature) 7.3 低温环境电气性能测试 (6) (Electronic performance Test at Low Temperature) 8 附录 (7) (Appendix) 8.1 输出电流测试值 (7) (Output Current Test Values) 8.2 效率测试数据记录 (7) (Record of Efficiency Test Date) 8.3 电压调整率计算 (8) (Line Voltage Calculation)
第三章 常用传感器 一、知识要点及要求 (1)掌握常用传感器的分类方法; (2)掌握常用传感器的变换原理; (3)了解常用传感器的主要特点及应用。 二、重点内容及难点 (一)传感器的定义、作用与分类 1、定义:工程上通常把直接作用于被测量,能按一定规律将其转换成同种或别种量值输出的器件,称为传感器。 2、作用:传感器的作用就是将被测量转换为与之相对应的、容易检测、传输或处理的信号。 3、分类:传感器的分类方法很多,主要的分类方法有以下几种: (1)按被测量分类,可分为位移传感器、力传感器、温度传感器等; (2)按传感器的工作原理分类,可分为机械式、电气式、光学式、流体式等; (3)按信号变换特征分类,可概括分为物性型和结构型; (4)根据敏感元件与被测对象之间的能量关系,可分为能量转换型与能量控制型; (5)按输出信号分类,可分为模拟型和数字型。 (二)电阻式传感器 1、分类:变阻式传感器和电阻应变式传感器。而电阻应变式传感器可分为金属电阻应变片式与半导体应变片两类。 2、金属电阻应变片式的工作原理:基于应变片发生机械变形时,其电阻值发生变化。金属电阻应变片式的的灵敏度v S g 21+=。 3、半导体电阻应变片式的工作原理:基于半导体材料的电阻率的变化引起的电阻的变化。半导体电阻应变片式的的灵敏度E S g λ=。 (三)电感式传感器 1、分类:按照变换原理的不同电感式传感器可分为自感型与互感型。其中自感型主要包括可变磁阻式和涡电流式。 2、涡电流式传感器的工作原理:是利用金属体在交变磁场中的涡电流效应。 (四)电容式传感器 1、分类:电容式传感器根据电容器变化的参数,可分为极距变化型、面积变化型、介质变化型三类。 2、极距变化型:灵敏度为201δ εεδA d dC S -==,可以看出,灵敏度S 与极距平方成反比,极距越小灵敏度越高。显然,由于灵敏度随极距而变化,这将引起非线性误差。 3、面积变化型:灵敏度为常数,其输出与输入成线性关系。但与极距变化型相比,灵敏度较低,适用于较大直线位移及角速度的测量。 4、介质变化型:可用来测量电介质的液位或某些材料的厚度、湿度和温度等;也可用于测量空气的湿度。 (五)压电式传感器 1、压电传感器的工作原理是压电效应。
控制器自动测试系统V1.O 设计手册
一.项目背景 目前国内控制器的软件测试基本还处在人工测试阶段,软件测试过程中的各种数据往往靠测试人员手动记录,测试过程中出现的各种非正常状态不能被可靠地记录下来以分析控制器软件的缺陷。这种人工软件测试的方式限制了控制器软件测试的效率以及测试的效果。 目前国内外公认的、行之有效的、具有广泛应用前景的方案就是在软件仿真测试平台上对软件进行自动测试。 控制器自动测试系统是面向控制器软件测试的计算机系统,测试人员可以根据被测软件的需求,通过对系统的各种资源进行配置,组织被测软件的输入,来驱动被测软件运行,同时接收被测软件的输出结果,从而对控制器软件进行自动的、实时的、非侵入性的闭环测试。能够大大提高控制器软件的测试质量和测试效率。 二.本软件开发的意义 目前控制器用得越来越广泛,从玩具车、收音机、空调、冰箱、洗衣机、录像机等家用产品到电子压力计,数控机床,商检自动测试仪等工业产品,到处都有微控制器的身影。为了在市场竞争中取得优势,各种厂商不断推出越来越多的产品系列,而且功能也越来越复杂、越来越完善,这样一来,使得各种控制器的硬件、软件也越来越复杂。缺乏可靠性的控制器软件将给产品带来难以预料的后果,家用产品可能只是影响产品的质量,工业产品可能会导致难以估计的经济损失甚至是安全事故。可见,控制器软件的可靠性是非常重要的。以往软件测试过程中的各种参数(如电机的转角、各种时间参数等)必须靠
测试人员手动记录,测试过程中出现的各种非正常状态也不能被可靠地记录下来以分析控制器软件的缺陷。而且,这种人工软件测试的测试效果与测试人员的工作经验和素质有很大关系,当测试人员调离该工作岗位后,后续人员很难在短时间内接手前期测试工作,需要有较长的培训期和学习期,而且也无法完全掌握原测试人员在长期工作过程中积累的经验,使知识积累出现断层。这种人工软件测试的方式限制了控制器软件测试的效率以及测试的效果。建立一套软件测试平台对控制器进行自动测试,可以通过自动测试系统一次完成控制器所需要测试的全部内容,取消了原有的人工测试,可以保证不会丢项和错项,并且能够减少人工缩短工时,大幅度降低生产成本。 三.技术方案概述 本项目选择建立一套软件仿真测试平台来测试控制器软件。主要验证软件功能是否符合功能规格书的要求,进行弱电部分电路的输入、输出实现以及连续记录。 控制器软件计算机自动测试平台由三个部分组成:运行平台,信号仿真平台和主控计算机平台,其构成关系如图1所示。 图1 软件测试平台构成示意图 其中,主控计算机平台主要进行测试用例的生成、测试运行调度管理、数据分配工作及测试后的评估工作并给出测试报告。运行平台就是系统的硬件及被测软件。信号仿真平台模拟系统外部运行环境, 它向系
实验四 控制系统频率特性的测试 一. 实验目的 认识线性定常系统的频率特性,掌握用频率特性法测试被控过程模型的原理和方法,根据开环系统的对数频率特性,确定系统组成环节的参数。 二.实验装置 (1)微型计算机。 (2)自动控制实验教学系统软件。 三.实验原理及方法 (1)基本概念 一个稳定的线性定常系统,在正弦信号的作用下,输出稳态与输入信号关系如下: 幅频特性 相频特性 (2)实验方法 设有两个正弦信号: 若以)(t x ω为横轴,以)(y t ω为纵轴,而以t ω作为参变量,则随t ω的变化,)(t x ω和 )(y t ω所确定的点的轨迹,将在 x--y 平面上描绘出一条封闭的曲线(通常是一个椭圆)。这 就是所谓“李沙育图形”。 由李沙育图形可求出Xm ,Ym ,φ,
四.实验步骤 (1)根据前面的实验步骤点击实验七、控制系统频率特性测试菜单。 (2)首先确定被测对象模型的传递函数, 预先设置好参数T1、T2、ξ、K (3)设置好各项参数后,开始仿真分析,首先做幅频测试,按所得的频率范围由低到高,及ω由小到大慢慢改变,特别是在转折频率处更应该多取几个点 五.数据处理 (一)第一种处理方法: (1)得表格如下: (2)作图如下: (二)第二种方法: 由实验模型即,由实验设置模型根据理论计算结果绘制bode图,绘制Bode图。
(三)误差分析 两图形的大体趋势一直,从而验证了理论的正确性。在拐点处有一定的差距,在某些点处也存在较大的误差。 分析: (1)在读取数据上存在较大的误差,而使得理论结果和实验结果之间存在。 (2)在数值应选取上太合适,而使得所画出的bode图形之间存在较大的差距。 (3)在实验计算相角和幅值方面本来就存在着近似,从而使得误差存在,而使得两个图形之间有差异 六.思考讨论 (1)是否可以用“李沙育”图形同时测量幅频特性和想频特性 答:可以。在实验过程中一个频率可同时记录2Xm,2Ym,2y0。 (2)讨论用“李沙育图形”测量频率特性的精度,即误差分析(说明误差的主要来源)答:用“李沙育图形”测量频率特性的精度从上面的分析处理上也可以看出是比较高的,但是在实验结果和理论的结果之间还是存在一定的差距,这些误差主要来自于从“李沙育图形”上读取数据的时候存在的误差,也可能是计算机精度方面的误差。 (3)对用频率特性测试系统数学模型方法的评测 答:用这种方法进行此次实验能够让我们更好地了解其过程,原理及方法。但本次实验的数据量很大,需要读取较多坐标,教学软件可以更智能一些,增加一些自动读取坐标的功能。 七.实验总结 通过本次实验,我加深了对线性定常系统的频率特性的认识,掌握了用频率特性法测试被控过程模型的原理和方法。使我把书本知识与实际操作联系起来,加深了对课程内容的理解。在处理数据时,需要进行一定量的计算,这要求我们要细心、耐心,作图时要注意不能用普通坐标系,而是半对数坐标系进行作图。
第8卷第3期 2008年6月 交通运输工程学JournalOfTrafficandTransportatio报 一 ● ● n Lngmeerlng V01.8 Jun.NO.3 2008 文章编号:1671—1637I2008)03—0015—05 0 车辆悬架最佳阻尼匹配减振器设计 周长城1’2,孟婕 (1.山东理工大学交通与车辆工程学院,山东淄博255049; 2.北京理工大学机械与车辆工程学院,北京 100081)
摘 要:为了使设计减振器对车辆具有最佳减振效果,利用悬架最佳阻尼比,对减振器最佳阻尼系 数进行了研究,建立了减振器最佳速度特性数学模型,提出了减振器阀系参数设计优化方法,对设计减振器进行了特性试验和整车振动试验,并与原车载减振器性能进行了对比。计算结果表明:减振器特性试验值与最佳阻尼匹配要求值的最大偏差为9%,而且,在低频范围内,设计减振器的整车振动传递函数幅值明显低于原车载减振器的幅值,有效遏制了簧下质量在13Hz附近的共振,因此,减振器速度特性模型和阀系参数优化设计方法是正确的。关键词:汽车工程;减振器;最佳阻尼;速度特性;设计模型;优化方法中图分类号:U463.335.1 文献标识码:A Designofshockabsorbermatchingtooptimal dampingofvehiclesuspension ZhouChang—chen91”.MengJiel (1.SchoolofTrafficandVehicleEngineering,ShandongUniversityofTechnology,Zibo255049,Shandong,China;2.Schoolof MachineandVehicleEngineering,BeijingInstituteofTechnology,Beijing100081,China) Abstract:Inorderto
产品名称Product name 密级Confidentiality level K3 内部公开 产品版本Product version V100R001 Total 5 pages 共5页K3V100R001样机功耗测试报告 Prepared by 拟制 Date 日期 2009-4-22 Reviewed by 评审人Date日期Approved by批准Date日期Authorized by签发Date日期 Huawei Technologies Co., Ltd. 华为技术有限公司 All rights reserved 版权所有侵权必究 (TST05T01 V2.0/ IPD-PTM V2.0 / 仅供内部使用)
Revision record 修订记录 Date 日期Revision Version 修订版 本 CR ID CR号 Section Number 修改章 节 Change Description 修改描述 Author 作者 2009-4-22 1.00 initial 初稿完成
目 录 1.测试目标 (4) 2.功耗测试概述 (4) 2.1测试原理 (4) 2.2测试需求 (4) 3.测试结果 (4)
K3V100R001样机功耗测试报告 1.测试目标 z测试各个常用应用场景的平均电流值,测试数据与产品规格或标杆手机作比对; z为后续K3功耗测试和优化提供参考依据。 2.功耗测试概述 2.1测试原理 本次使用直流稳压电源KEITHLEY 2306提供3.70V电压为手机供电(特殊情况专门说明),每30秒钟积分一次,测试手机在各个常用应用场景的平均电流。 测试过程中SD卡、SIM卡在位,文件存放在SD卡中,其他设置均为出厂默认设置(有特殊要求的除外)。 2.2测试需求 名称型号 直流稳压电源 KEITHLEY 2306 Windows Mobile手机 K3样机 存储卡 2GB的Micro SD卡 SIM卡 中国移动GSM卡 Wireless Access Point D-Link DWL 2100AP 3.测试结果 ROM020NXF1092000135
实验一过程控制系统的组成认识实验 过程控制及检测装置硬件结构组成认识,控制方案的组成及控制系统连接 一、过程控制实验装置简介 过程控制是指自动控制系统中被控量为温度、压力、流量、液位等变量在工业生产过程中的自动化控制。本系统设计本着培养工程化、参数化、现代化、开放性、综合性人才为出发点。实验对象采用当今工业现场常用的对象,如水箱、锅炉等。仪表采用具有人工智能算法及通讯接口的智能调节仪,上位机监控软件采用MCGS工控组态软件。对象系统还留有扩展连接口,扩展信号接口便于控制系统二次开发,如PLC控制、DCS控制开发等。学生通过对该系统的了解和使用,进入企业后能很快地适应环境并进入角色。同时该系统也为教师和研究生提供一个高水平的学习和研究开发的平台。 二、过程控制实验装置组成 本实验装置由过程控制实验对象、智能仪表控制台及上位机PC三部分组成。 1、被控对象 由上、下二个有机玻璃水箱和不锈钢储水箱串接,4.5千瓦电加热锅炉(由不锈钢锅炉内胆加温筒和封闭外循环不锈钢锅炉夹套构成),压力容器组成。 水箱:包括上、下水箱和储水箱。上、下水箱采用透明长方体有机玻璃,坚实耐用,透明度高,有利于学生直接观察液位的变化和记录结果。水箱结构新颖,内有三个槽,分别是缓冲槽、工作槽、出水槽,还设有溢流口。二个水箱可以组成一阶、二阶单回路液位控制实验和双闭环液位定值控制等实验。 模拟锅炉:锅炉采用不锈钢精致而成,由两层组成:加热层(内胆)和冷却层(夹套)。做温度定值实验时,可用冷却循环水帮助散热。加热层和冷却层都有温度传感器检测其温度,可做温度串级控制、前馈-反馈控制、比值控制、解耦控制等实验。 压力容器:采用不锈钢做成,一大一小两个连通的容器,可以组成一阶、二阶单回路压力控制实验和双闭环串级定值控制等实验。 管道:整个系统管道采用不锈钢管连接而成,彻底避免了管道生锈的可能性。为了提高实验装置的使用年限,储水箱换水可用箱底的出水阀进行。 2、检测装置 (液位)差压变送器:检测上、下二个水箱的液位。其型号:FB0803BAEIR,测量范围:0~1.6KPa,精度:0.5。输出信号:4~20mA DC。 涡轮流量传感器:测量电动调节阀支路的水流量。其型号:LWGY-6A,公称压力:6.3MPa,精度:1.0%,输出信号:4~20mA DC 温度传感器:本装置采用了两个铜电阻温度传感器,分别测量锅炉内胆、锅炉夹套的温度。经过温度传感器,可将温度信号转换为4~20mA DC电流信号。 (气体)扩散硅压力变送器:用来检测压力容器内气体的压力大小。其型号:DBYG-4000A/ST2X1,测量范围:0.6~3.5Mpa连续可调,精度:0.2,输出信号为4~20mA DC。 3、执行机构 电气转换器:型号为QZD-1000,输入信号为4~20mA DC,输出信号:20~100Ka气压信号,输出用来驱动气动调节阀。 气动薄膜小流量调节阀:用来控制压力回路流量的调节。型号为ZMAP-100,输入信号为4~20mA DC或0~5V DC,反馈信号为4~20mA DC。气源信号 压力:20~100Kpa,流通能力:0.0032。阀门控制精度:0.1%~0.3%,环境温度:-4~+200℃。 SCR移相调压模块:采用可控硅移相触发装置,输入控制信号0~5V DC或4~20mA DC 或10K电位器,输出电压变化范围:0~220V AC,用来控制电加热管加热。 水泵:型号为UPA90,流量为30升/分,扬程为8米,功率为180W。
4.7减振器机构类型及主要参数的选择计算 4.7.1分类 悬架中用得最多的减振器是内部充有液体的液力式减振器。汽车车身和车轮振动时,减振器内的液体在流经阻尼孔时的摩擦和液体的粘性摩擦形成了振动阻力,将振动能量转变为热能,并散发到周围空气中去,达到迅速衰减振动的目的。如果能量的耗散仅仅是在压缩行程或者是在伸张行程进行,则把这种减振器称之为单向作用式减振器,反之称之为双向作用式减振器。后者因减振作用比前者好而得到广泛应用。 根据结构形式不同,减振器分为摇臂式和筒式两种。虽然摇臂式减振器能够在比较大的工作压力(10—20MPa)条件下工作,但由于它的工作特性受活塞磨损和工作温度变化的影响大而遭淘汰。筒式减振器工作压力虽然仅为2.5~5MPa ,但是因为工作性能稳定而在现代汽车上得到广泛应用。筒式减振器又分为单筒式、双筒式和充气筒式三种。双筒充气液力减振器具有工作性能稳定、干摩擦阻力小、噪声低、总长度短等优点,在轿车上得到越来越多的应用。 设计减振器时应当满足的基本要求是,在使用期间保证汽车行驶平顺性的性能稳定。 4.7.2相对阻尼系数ψ 减振器在卸荷阀打开前,减振器中的阻力F 与减振器振动速度v 之间有如下关系 v F δ= (4-51) 式中,δ为减振器阻尼系数。 图4—37b 示出减振器的阻力-速度特性图。该图具有如下特点:阻力-速度特性由四段近似直线线段组成,其中压缩行程和伸张行程的阻力-速度特性各占两段;各段特性线的斜率是减振器的阻尼系数v F /=δ,所以减振器有四个阻尼系数。在没有特别指明时,减振器的阻尼系数是指卸荷阀开启前的阻尼系数而言。通常压缩行程的阻尼系数Y Y Y v F /=δ与伸张行程的阻尼系数S S S v F /=δ不等。 图4—37 减振器的特性 a) 阻力一位移特性 b)阻力一速度特性 汽车悬架有阻尼以后,簧上质量的振动是周期衰减振动,用相对阻尼系数ψ的大小来评定振动衰减的快慢程度。ψ的表达式为 s cm 2δ ψ= (4-52)
电源测试报告 一、功率因数与效率测试 1、使用仪器设备:AC SOURCE(交流电源)、电子负载、万用表、功率表; 2、测试条件:输入电压220Vac,输入频率50Hz/60Hz,输出带最大负载1.7A、常温25℃; 3、测试方法: 1)、依规格设定测试条件;输入电压、输入频率、最大负载; 2)、从功率表中读取Pin and PF值,并读取输出电压计算Pout; 3)、功率因数=Pin/(Vin*Iin),效率=Pout/Pin*100﹪; 4、测试数据 二、能效测试 1、使用仪器设备:AC SOURCE(交流电源)、电子负载、万用表、功率表; 2、测试条件:输入电压220Vac,输入频率50Hz/60Hz,输出负载分别为1.7A,1.275A,0.85A,0.425A; 3、测试方法: 1)、在测试前将产品在标称负载条件下预热1分钟; 2)、按负载大小由大到小分别记录220V ac/50Hz/60Hz输入时的输入功率(Pin),输入电流(Iin),输出电压(Vo1,Vo2),功率因数(PF),然后计算各负载下的效率; 3)、在空载时记录输入功率与输入电流。 4、测试数据 三、纹波与噪声测试 1、使用仪器设备:AC SOURCE(交流电源)、电子负载、示波器; 2、测试条件:输入电压220Vac,输入频率50Hz/60Hz,负载分别为1.7A,1.275A,0.85A,0.425A,0A,常温25℃; 3、测试方法:按测试回路接好各测试仪器,设备,及待测品,测电源在各负载下的纹波与噪声; 4、测试数据及最大幅值的波形。 四、上升/下降时间测试 1、使用仪器设备:AC SOURCE(交流电源)、电子负载、示波器; 2、测试条件:输入电压220Vac,输入频率50Hz/60Hz,负载为1.7A;
微程序控制器实验报告记录
————————————————————————————————作者:————————————————————————————————日期:
计算机科学与技术系 实验报告 专业名称计算机科学与技术 课程名称计算机组成与结构 项目名称微程序控制器实验 班级 学号 姓名 同组人员无 实验日期 2015-11-11
一、实验目的 1.掌握微程序控制器的组成原理; 2.掌握微程序的编制、写入、观察微程序的运行情况。 二、实验逻辑原理图与分析 2.1 实验逻辑原理图及分析 微程序控制器的基本任务是完成当前指令的翻译和执行,即将当前指令的功能转换成可以控制硬件逻辑部件工作的微命令序列,以完成数据传输和各种处理操作。它的执行方法就是将控制各部件动作的微命令的集合进行编码,即将微命令的集合仿照机器指令一样,用数字代码的形式表示,这种表示称为微指令。这样就可以用一个微指令序列表示一条机器指令,这种微指令序列称为微程序。微程序存储在一种专用的存储器中,该存储器称为控制存储器,如图所示: 微程序控制器组成原理框图 控制器是严格按照系统时序来工作的,因而时序控制对于控制器的设计是非常重要的,从前面的实验可以很清楚地了解时序电路的工作原理。本实验所用的时序单元来提供,分为四拍TS1、TS2、TS3、TS4。 在微程序控制器的组成中,控制器采用3片2816的E^2PROM,具有掉电保护功能,微命令寄存器18位,用两片8D触发器(273)和一片4D(175)触发器组成。为地址寄存器6位,用三篇正沿触发的双D触发器(74)组成,他们带有清“0”端和预置端。在不判别测试的情况下,T2时刻打入微地址寄存器的内容即为吓一条微指令地址。当T4时刻惊醒测试判别式,转移逻辑满足条件后输出的负脉冲通过强置端将某一触发器置为“1”状态,完成地址修改。
软件系统测试报告 ——网上招聘系统 学院:计算机科学学院 背景: 如今网上招聘越来越普遍,但有些招聘系统的综合性能不是很好,
比如系统的冗余、系统的性能、安全性、完整性等等都有待提高,本次测试的目的就是针对本系统的性能进行测试。 一.实验目的 1、通过对测试结果的分析,得到对软件质量的评价 2、分析测试的过程,产品,资源,信息,为以后制定测试计划提供参考 3、评估测试测试执行和测试计划是否符合 4、分析系统存在的缺陷,为修复和预防bug提供建议 二、实验内容 该文档的目的是描述网上招聘系统项目客户端系统测试的总结报告,其主要内容包括: ●系统环境简介 1、软件名称:网上招聘求职系统 2、软件功能:为求职者提供求职、收藏、信息交互等功能;为招聘单位提供招聘、收藏、信息交互等功能;为管理员提供管理网站公告、友情链接和网站会员的管理功能。 3、用户:求职者、招聘单位、管理员 4、开发者:ZSS ●系统数据度量 ●系统结果评估 用户群:1、项目管理人员 2、测试人员 范围:该文档定义了客户端系统测试的结果,总结了测试客户端的
职位查询、网上提交简历、在线答题的基本功能,以及支持大数据量并发访问的性能,给出了测试的结论。 2.1严重bug:出现以下缺陷,测试定义为严重bug 系统无响应,处于死机状态,需要其他人工修复系统才可复原。 点击某个菜单后出现“The page cannot be displayed”或者返回 异常错误。 进行某个操作(增加、修改、删除等)后,出现“The page cannot be displayed”或者返回异常错误 2.2缩写说明 HR--- Human Resource(人力资源管理)的缩写。 MVC---Model-View-Control(模式-视图-控制)的缩写,表示一个三层的结构体系。 2.3测试类型 a、功能性测试:按照系统需求定义中的功能定义部分对系统实行的系统级别的测试。 b、非功能性测试:按照系统需求定义中的非功能定义部分(如系统的性能指标,安全性能指标等)对系统实行的系统级别的测试。 c、测试用例:测试人员设计出来的用来测试软件某个功能的一种情形 2.4参考资料 [1] 《LoadRunner使用手册》北京长江软件有限公司编制 [2] 《网上招聘客户端需求说明》北京长江软件有限公司编制
【最新整理,下载后即可编辑】 悬架用减振器设计指南 一、功用、结构: 1、功用 减振器是产生阻尼力的主要元件,其作用是迅速衰减汽车的振动,改善汽车的行驶平顺性,增强车轮和地面的附着力.另外,减振器能够降低车身部分的动载荷,延长汽车的使用寿命. 目前在汽车上广泛使用的减振器主要是筒式液力减振器,其结构可分为双筒式,单筒充气式和双筒充气式三种. 导向机构的作用是传递力和力矩,同时兼起导向作用.在汽车的行驶过程当中,能够控制车轮的运动轨迹。 汽车悬架系统中弹性元件的作用是使车辆在行驶时由于不平路面产生的振动得到缓冲,减少车身的加速度从而减少有关零件的动负荷和动应力。如果只有弹性元件,则汽车在受到一次冲击后振动会持续下去。但汽车是在连续不平的路面上行驶的,由于连续不平产生的连续冲击必然使汽车振动加剧,甚至发生共振,反而使车身的动负荷增加。所以悬架中的阻尼必须与弹性元件特性相匹配。 2、产品结构定义 ①减振器总成一般由:防尘罩、油封、导向座、阀系、储油缸筒、工作缸筒、活塞杆构成。
②奇瑞现有的减振器总成形式: 二、设计目的及要求: 1、相关术语 *减振器 利用液体在流经阻尼孔时孔壁与油液间的摩擦和液体分子间的摩擦形成对振动的阻尼力,将振动能量转化为热能,进而达到衰减汽车振动,改善汽车行驶平顺性,提高汽车的操纵性和稳定性的一种装置。 *阻尼特性 减振器在规定的行程和试验频率下,作相对简谐运动,其阻力(F)与位移(S)的关系为阻尼特性。在多种速度下所构成的曲线(F-S)称示功图。 *速度特性 减振器在规定的行程和试验频率下,作相对简谐运动,其阻力(F)与速度(V)的关系为速度特性。在多种速度下所构成的曲线(F-V)称速度特性图。
中国联通鸡西分公司功率测试分析总结报告 2008年1月20日
测试目的:全面掌握现网不同厂家多期设备的输出功率,以及合路器、馈线损耗,为日后的故障定位、网络 优化调整提供理论依据。 测试方法: 在线测试 a)对现网西门子、华为、北电厂家的不同类型的TRX的 输出功率进行测试。 b)对西门子、华为厂家不同型号的合路器损耗进行测试。 c)对不同工期的馈线损耗进行测试。 测试人员:赵佳溪、王加玉、颐龙公司:关雷 测试地点:业务分配成功率低的小区、故障较高的小区。 测试时间:2007年12月-2008年1月 测试设备:Digital Power Meter 数字功率测试仪 型号:BIRD Model 5000-EX 分析总结时间:2008年1月17日-2008年1月20日
●概述 鸡西联通运行维护部无线及网优人员本着主动学习提高自身维护技能的原则,为全面掌握现网设备功率输出及损耗情况,并为今后的故障定位、优化调整提供理论依据,于2007年12月—2008年1月期间对现网业务信道分配成功率低和故障率相对较高的小区进行了在线对比测试。本次测试共涉及鸡密虎地区9期工程的19个站点45个小区功率测试。 附件一:功率W与Dbm换算关系 ●功率测试数据汇总分析 本次测试共计对GSM网络1期、4期、5期、6期、7期、9期、12期、13期、15期合计16个基站以及CDMA网络3个基站进行在线功率测试。 测试过程中发现,瓦数相同的载频输出功率也存在差异。为了查找其原因,无线及网络优化中心人员利用同一个基站同一个合路器带相同瓦数的不同载频进行多次在线测试,通过测试结果发现:即使相同瓦数的不同载频输出功率也存在微小的差异,而同一个载频在不同的时段进行在线功率测试,输出的功率也不相同。 详细的功率测试数据见附件二。 ●功率测试分析总结 通过对本次不同工期设备功率对比测试数据汇总、分析、研讨得出以下结论: 一、G网设备功率测试
第2次作业 一、多项选择题(本大题共100分,共 25 小题,每小题 4 分) 1. 传感器的静态标定设备(标准值发生器)有() A. 力标定设备 B. 压力标定设备 C. 温度标定设备 D. 激振台 E. 力锤 2. 传感器的基本参数有() A. 测量范围 B. 量程 C. 过载能力 D. 灵敏度 E. 静态精度 3. 压电元件的连接方式有(),其中()方式输出电荷量大。 A. 多片串联 B. 多片并联 4. 在金属热电阻中,其测温特性最好的是( ),在精度要求不高的场合和测温范围较小时,普遍使用( )。 A. 铂电阻 B. 镍电阻 C. 铜电阻 D. 锰电阻 5. 串联两个热电偶的输出电动势是( ),因而可以用于测量( )。 A. 各热电动势的平均值 B. 各热电动势的代数和 C. 两点之间温度之和(差) D. 两点的平均温度 6. 形成干扰的条件是( )。 A. 干扰源 B. 信号是缓变信号 C. 干扰的耦合通道 D. 干扰的接收回路 E. 信号是交流信号 7. 测量信号经过频率调制后,所得到调频波的( )是随( )而变化的。 A. 幅值 B. 频率 C. 信号幅值 D. 信号频率 8. 选用不同导体材料做热电极,会影响热热电偶温度传感器的( )。 A. 灵敏度 B. 精度 C. 测量范围 D. 稳定性
9. ( ) 传感器属于有源型传感器。 A. 压电式 B. 热电式 C. 电感式 D. 电容式 E. 电阻式 10. 热电动势的大小与( )有关。 A. 两电极的材料 B. 热端温度 C. 冷端温度 D. 电极的尺寸与形状 11. 为了抑制干扰,常用的隔离电路有( )。 A. 滤波电路 B. A/D转换器 C. 变压器 D. 光耦合器 E. 调谐电路 12. 压电传感器的测量电路有(),其中能排除电缆电容影响的是()。 A. 电压放大器 B. 相敏整流电路 C. 电荷放大器 D. 交流电桥 E. RC滤波器 13. 抑制干扰的方法主要是() A. 单点接地 B. 屏蔽 C. 隔离 D. 滤波 14. 压电式加速度传感器是( )传感器。 A. 发电型 B. 能量转换型 C. 参量型 D. 适宜测量静态信号的 E. 适宜测量动态信号的 15. 通常采用的压力敏感元件有()。其中,()常用在电容式、应变式及电感式压力传感器中。 A. 模片 B. 柱形弹性元件 C. 波登管 D. 波纹管 E. 梁形弹性元件 F. 环形弹性元件 16. 在测量系统中有哪些接地系统() A. 安全地
电机控制器可靠性测试 文件编号______________________________________ 版次______________________________________ 受控编号______________________________________ 编制________________ _____年____月____日审核________________ _____年____月____日审定________________ _____年____月____日批准________________ _____年____月____日 年月日发布年月日实施
目录 目录 (1) 1 简介 (2) 2 系统组成 (2) 2.1 试验电源 (2) 2.2电力测功机系统 (2) 2.3机械台架系统 (2) 2.4电机参数测量采集系统 (2) 3 实验准备 (2) 3.1 仪器准确度 (2) 3.2 测量要求 (2) 3.3 试验电源 (3) 3.4 布线 (3) 3.5 冷却装置 (3) 4 试验项目 (3) 5 盐雾试验 (3) 5.1 试验目的 (3) 5.2 适用范围 (3) 5.3 操作设备 (3) 5.4 操作程序 (4) 5.4.1准备工作 (4) 5.4.2操作步骤 (4) 5.4.3注意事项 (4) 5.5结果记录 (4) 5.6试验报告 (5) 6 温升试验 (5) 6.1 试验目的 (5) 6.2 适用范围 (5) 6.3 试验设备 (5) 6.4 操作程序 (5) 6.5 注意事项 (6) 6.6 试验报告 (6) 7 振动试验 (6) 7.1试验目的 (6) 7.2适用范围 (6) 7.3试验设备 (6) 7.4试验程序 (6) 7.5 试验报告 (6) 8 老化试验 (7) 8.1试验目的 (7) 8.2适用范围 (7) 8.3试验设备 (7) 8.4试验程序 (7) 8.5试验报告 (7)
测试过程控制及样例
测试过程控制及样例 1目的 确保测试的有效性和验证结果的可靠性,从而保证软件实现阶段质量和最终质量。并作为验证及确认软件版本发布、项目验收的依据。 2适用范围 部门:应用开发事业部总监、系统测试部、软件部门、业务部门。 业务:模块测试、系统测试,β测试及试运行测试结果的收集。 3职责 1)1)系统测试部经理负责组织测试人员编写测试工作计划和测试大纲,审 核测试记录和测试报告,申请发布β测试版或软件试运行。 2)2)测试人员按照测试工作计划和测试大纲进行测试,填写测试记录,编 写系统测试报告和用户测试报告。 3)3)业务部门负责提供用户测试名单,系统测试部收集β测试结果 4)4)应用开发事业部(副)总监审批测试报告,批准β测试版发布或软件 试运行,通知业务部门。 5)5)市场部为产品发布做准备。 6)6)总经理批准紧急放行。 7)7)系统测试部负责解释和修订本程序文件。 4工作程序 1)1)测试准备 除单元测试外,在进行各种测试前应准备做好如下准备: ●●配备测试用硬件环境; ●●建立相应的运行环境和网络环境; ●●准备测试数据; 2)2)测试依据 测试依据主要包括:测试工作计划、测试大纲、上阶段测试记录、上版软件产品用户反馈意见记录等。 3)3)测试工作计划及测试大纲 系统测试部经理组织测试人员按照/3-07/QR/001《测试工作计划》编写测试工作计划,测试工作计划应主要包括测试进度、人员安排、设备环境的建立等。测试工作计划经应用开发事业部(副)总监批准后实施。 系统测试部经理组织测试人员,根据软件《需求分析规格说明书》、《软件设计说明书》,按照/3-07/QR/002《测试大纲编写指南》编写测试大纲。 测试大纲作为测试的主要依据,测试大纲经应用开发事业部(副)总监批准后实施。
第18卷增刊2 系 统仿真学报? Vol. 18 Suppl.2 2006年8月 Journal of System Simulation Aug., 2006 汽车减振器阻尼特性的仿真分析 任卫群1, 赵峰1, 张杰1,2 (1.华中科技大学CAD中心, 湖北武汉 430074; 2.万向集团技术中心, 浙江杭州311215) 摘要:采用系统仿真方法及MATLAB软件,建立汽车减振器的详细模型,并进行仿真研究。模型能反映减振器的详细物理结构,如考虑油液特性影响、阀片刚度影响、摩擦力影响等。模型经试验校验/阻尼特性计算精度达90%,模型精度能满足实际工程问题的需要。经二次开发形成一套能进行参数化自动建模和仿真分析的软件系统,最终在汽车减振器设计过程中形成一套阻尼特性研究的系统完整的方法。 关键词:系统仿真;汽车减振器;阻尼特性中图分类号:TP 391.77 文献标志码:A 文章编号:1004-731X (2006) S2-0957-04 Simulation on Damping Behavior of Vehicle Shock Absorber REN Wei-qun1, ZHAO Feng1, ZHANG Jie1,2 (1. CAD Center, Huazhong University of Science and Technology, Wuhan 430074, China; 2. Wanxiang Group Technical Center, Hangzhou 311215, China) Abstract: The system simulation method and the MATLAB software were used to build a detailed model of a vehicle shock absorber. The detailed structure includes in the model, such as the hydraulic properties, the valve stiffness and the friction force. The absorber model was validated using test data and the precision is above 90%, which can fulfill the engineering requirement. An automated modeling and simulation software package based on MATLAB was developed, which could support a systematic research of vehicle shock absorbers in its design. Key words: system simulation; vehicle shock absorbers; damping behavior 汽车双向筒式液压减振器的仿真模型分为两类,一类是反映减振器外部特性的黑箱模型[1-2],包括恢复力映射方法、神经网络方法等,黑箱模型不能细致地反映减振器具体结构(如阀片具体参数)调整对性能的直接影响,不能完全满足减振器模型作为性能预测工具的需要。另一类是基于内部结构机理建模的详细物理模型[3-4],包含压力模型和阀片压力-流速特性,其中压力模型用一阶非线性微分方程表达流体可压缩性模型、确定不同的内部腔体压力,阀片的压力-流速特性可采用测力计试验辨识阀片参数后解析地确定、或由试验直接测定得到压力-流速