驾驶辅助系统
前言
驾驶辅助系统是当前国际智能交通系统研究的重要内容,它是利用机器视觉和传感器技术实现对驾驶员周围环境状况实时通报,并在本车可能发生潜在危险时及时警示驾驶员采取有效措施,消除事故隐患。
驾驶辅助系统有车道保持辅助系统、自动泊车辅助系统、刹车辅助系统、行车辅助系统、车辆红外线夜视辅助系统等。
1.车道保持辅助系统
车道保持辅助系统可以帮助司机将车辆保持在原车道上行驶。借助一个摄像头识别行驶车道的标志线。如果车辆接近识别到的标记线并可能脱离行驶车道,系统会通过方向盘的振动提醒驾驶员注意。如果车道保持辅助系统识别到本车道两侧的标记线,系统处于待命状态。如果在车辆横过车道边界线之前拨动了转向灯,系统就不会给出振动提醒,因为系统认为这是驾驶员需要变道。在接近或者横过识别出的车道边界线时,会产生振动,并且这种振动提醒只发生一次。车道保持辅助系统是为高速公路和主干线公路而设计的,所以该系统在车速高于约65km/h时才会工作。环境条件恶劣时,比如车道脏污或者覆盖着雪、车道过窄、车道边界线不清晰(如高速公路施工时)该系统暂时会不工作,系统当前的工作状态会显示在组合仪表上。
2.自动泊车辅助系统
倒车辅助系统以图像、声音的直观形式告知驾驶者车与障碍物的相对位置,解除因后视镜存在盲区带来的困扰,从而为驾驶者倒车泊车提供方便,消除安全隐患。按所使用的传感器不同,倒车辅助系统可分为红外线式、电磁感应式和超声波式。红外线式的最大缺点是红外线易受干扰,对深黑色粗糙表面物体的反应不灵敏。并且,如果红外线发射器或接收器表面被一层薄薄的冰雪或泥尘覆盖,系统就会失效。电磁感应式的倒车辅助系统其检测稳定性和灵敏度比红外线提高许多,其缺点是只能动态检测障碍物。超声波与机器视觉配合式的倒车辅助系统使用超声波传感器检测障碍物,并能结合摄像头自动识别停车线,当汽车自动检测好停车位置和距离时,只要驾驶者按下确认键,该系统就会自动泊车。
自动泊车辅助系统的基本原理是通过车身前后和侧面的多个传感器,来测算车位的大小、距离以及准确的入位角度。系统对车辆和车位都有要求:首先车辆必须装有倒车影像功能的屏幕,其次,在停车时,车位的大小不应小于车身总长加2米的长度,而倒车时,与旁边车辆的横向距离应该保持在0.5-1.5 m之间。选择好车位就可以泊车。将车摆放好挂入倒档后,倒车影像屏幕会自动显示出你所在的位置和周围环境,这时用户在触摸屏式导航仪上,通过移动光标来设定泊车的目标位置,同时启动智能泊车系统。系统一旦启动会自行旋转转向盘,然后缓慢进行倒车,最后将车辆停在泊车位置附近。驾驶者可以在注意周围有无障碍物的同时,控制油门或制动调整泊车过程。目前,自动泊车系统还存在一些局限,随着技术不断改进,将对泊车起始点的要求减弱,车位侦测速度和精度得到提高,泊车过程运行更加平稳快捷等。
3.制动辅助系统
制动主要包括电磁制动,电子液压制动,电子机械制动。制动系统的技术有:EBA
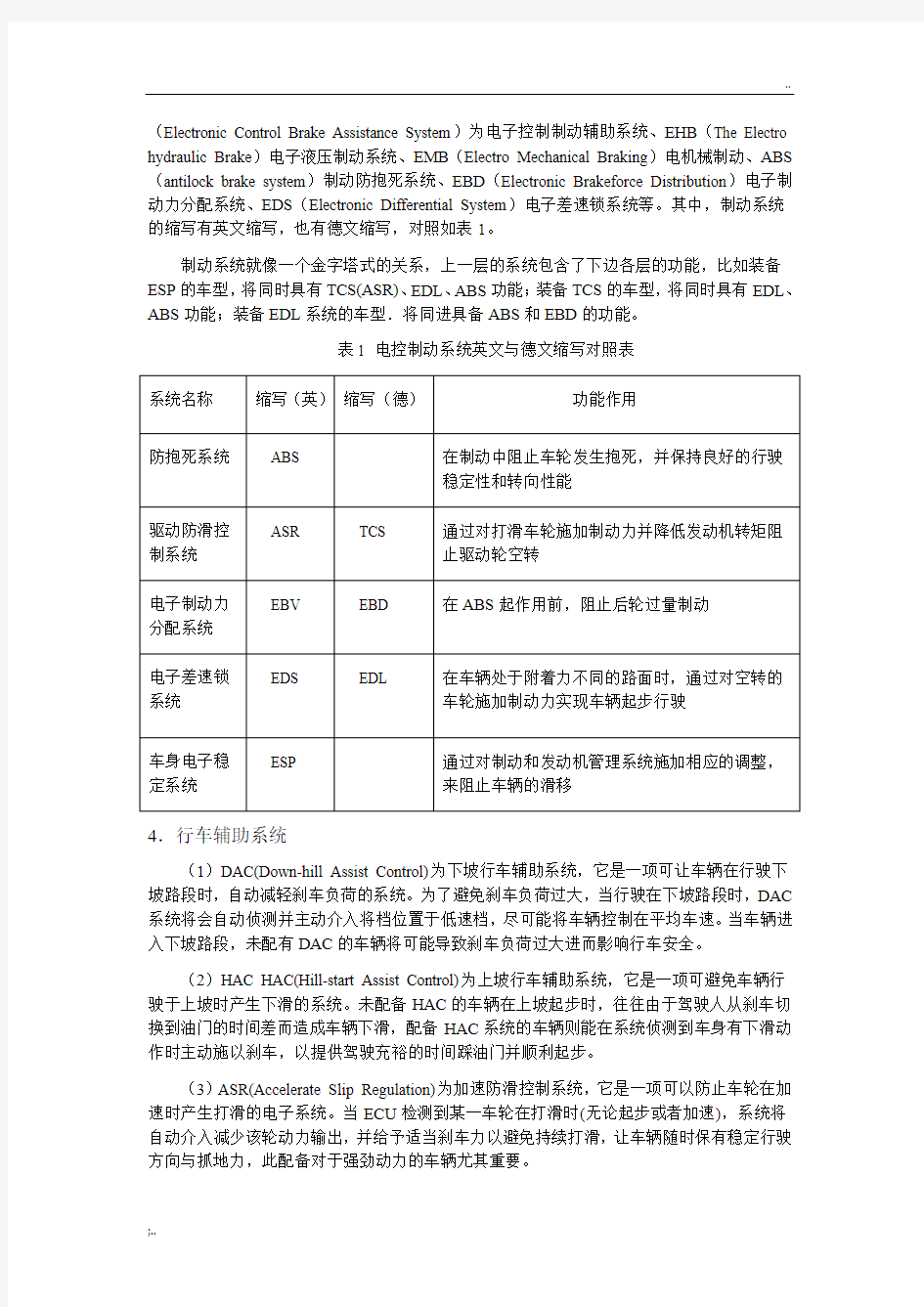
(Electronic Control Brake Assistance System)为电子控制制动辅助系统、EHB(The Electro hydraulic Brake)电子液压制动系统、EMB(Electro Mechanical Braking)电机械制动、ABS (antilock brake system)制动防抱死系统、EBD(Electronic Brakeforce Distribution)电子制动力分配系统、EDS(Electronic Differential System)电子差速锁系统等。其中,制动系统的缩写有英文缩写,也有德文缩写,对照如表1。
制动系统就像一个金字塔式的关系,上一层的系统包含了下边各层的功能,比如装备ESP的车型,将同时具有TCS(ASR)、EDL、ABS功能;装备TCS的车型,将同时具有EDL、ABS功能;装备EDL系统的车型.将同进具备ABS和EBD的功能。
表1 电控制动系统英文与德文缩写对照表
4.行车辅助系统
(1)DAC(Down-hill Assist Control)为下坡行车辅助系统,它是一项可让车辆在行驶下坡路段时,自动减轻刹车负荷的系统。为了避免刹车负荷过大,当行驶在下坡路段时,DAC 系统将会自动侦测并主动介入将档位置于低速档,尽可能将车辆控制在平均车速。当车辆进入下坡路段,未配有DAC的车辆将可能导致刹车负荷过大进而影响行车安全。
(2)HAC HAC(Hill-start Assist Control)为上坡行车辅助系统,它是一项可避免车辆行驶于上坡时产生下滑的系统。未配备HAC的车辆在上坡起步时,往往由于驾驶人从刹车切换到油门的时间差而造成车辆下滑,配备HAC系统的车辆则能在系统侦测到车身有下滑动作时主动施以刹车,以提供驾驶充裕的时间踩油门并顺利起步。
(3)ASR(Accelerate Slip Regulation)为加速防滑控制系统,它是一项可以防止车轮在加速时产生打滑的电子系统。当ECU检测到某一车轮在打滑时(无论起步或者加速),系统将自动介入减少该轮动力输出,并给予适当刹车力以避免持续打滑,让车辆随时保有稳定行驶方向与抓地力,此配备对于强劲动力的车辆尤其重要。
(4)ESP(Electronic Stability Program)为电子车身稳定系统,它是一项可防止车辆遭遇紧急状况时发生打滑失控的电子系统,而各家车厂之命名也不尽相同,如VDC、DSC、VSA 皆属同系。ESP常与ABS、EBD、BAS等刹车辅助系统整合,当车辆高速入弯或遭遇危机必须进行紧急闪避时,该系统会自动分析车况,并对车轮施以适当刹车力以修正转向过度或不足,让车身在紧急闪避过后依旧保有最佳稳定动态,避免不受控制的失控发生。车辆高速入弯时,未搭载ESP的车将可能导致失控,而搭载ESP的车(绿色路径)则可适度抑制转向过度,让车辆保持应有循迹路线。
(5)ACC(Adaptive Cruise Control)自适应巡航控制系统,自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。自适应巡航控制系统在控制车辆制动时,通常会将制动减速度限制在不影响舒适的程度,当需要更大的减速度时,ACC控制单元会发出声光信号通知驾驶者主动采取制动操作。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。
(6)BSMS(Blind Spot Monitoring System)为盲点监测系统,通过雷达、摄像头等装置,在车辆行驶时对车辆两侧的盲区进行探测,如果有其他车辆进入盲区,会在后视镜或其他指定位置对司机进行提示,从而告知司机何时是并线的最好时机,大幅度降低了因并线而发生的事故。
5.车辆红外线夜视辅助系统
夜视技术是研究在夜间照度低的情况下,采用拓宽人类裸眼有限视力的方案以实现夜间观察景物的一种方法。它应用光电效应原理与光电子成像的方法,使人眼的视觉能力得到一定程度的扩展。在黎明或夜间模式下,该系统能在大灯光束照射到(驾驶员视野范围内)行人和障碍物之前,就能够监测到车辆前方行人和障碍物的图像,并通过仪表盘显示给驾驶员。夜视系统能使驾驶员辨别出距离210m左右路旁身着浅色衣服的试验假人,比氙气大灯提早41 m左右。而在行人身着黑色衣服时,可提早92m左右。这意味着采用夜视辅助系统可以将夜间行车安全性提高125%以上。同时,由于对于潜在危险信息的充分掌握也能够使驾驶者在夜间驾驶过程中的心理压力大为缓解,进而使驾驶过程更加舒适放松。
夜视系统分为主动式红外夜视和被动夜视红外系统。主动式红外夜视仪采用自身携带的红外探照灯,主动照明被探测的景物,探照灯发射出的不可见红外光被景物反射回来,由带有红外变像管的夜视仪探测出来,并被转换成可见光图像,供人眼观察。主动夜视系统因为主动照明,故景物图像反差较大、图像较清晰。被动式微光夜视与主动式红外夜视工作原理相仿。不同的是:被动式微光夜视仪自身不带光源,它探测景物的微光图像,并且放大到足以供人眼观察的程度。
BZ2012-1最新款豪华型汽车驾驶模拟器 BZ2012-1型驾驶模拟器是我公司根据最新的驾驶员培训大纲和最新的驾驶模拟器行业标准(JT/T398-2011)开发而成的最新产品,驾驶座舱进行了大量技术创新和改进,并配置了最新的“BZ-2011驾驶模拟器软件V1.2”。 一、座舱 座舱由驾驶舱座,视景计算机,视屏(19寸显示器),操作传感器,数据采集卡,耳机和话筒等组成。 座舱包含了与真实车辆相同的操作部件,“五大”操纵机构:方向盘、离合器,脚刹,油门和手刹。真车变速器:倒档、一档、二档、三档、四档、五档和空挡(自动档只含前进档、倒车档和驻车档)。真车操作开关:左转向灯、右转向灯、应急灯、喇叭、点火开关、总电开关、安全带、车门、雨刷、远光灯、近光灯、远近光交替。 座舱既可以进行联网训练,也可以进行单机训练。利用主控台计算机,最多可以将30台座舱连接到一个训练场景进行训练。 学员通过操作不同的操作部件,经过各自的传感器产生不同的操作信号,这些操作信号通过数据采集卡传送给计算机,经过各种训练模型的逼真运算,最后在视屏上输出与操作相对应的三维场景与各种声音。
二、主要功能 驾驶舱配备最新的BZ2012-1驾驶模拟器软件V1.2版,该软件为我公司最新开发完成,具有自主知识产权。 软件采用汽车多自由度数学模型,实现汽车转向、制动和加速的逼真模拟;另外利用最新的计算机技术,实现真实的三维场景及逼真的声音模拟。 训练按照三个难度级别分别进行训练:初级驾驶,中级驾驶和高级驾驶。 BZ2012-1驾驶模拟器软件技术指标 训练车型选择场地训练选择界面 城市道路选择乡村道路选择 面板提示语(关键词语): ▲三级课程训练模式:初级、中级、高级 ▲ 14种全新训练车型 ▲全自动配置被动驾驶训练文件 ▲丰富的驾驶培训教学录像 ▲最新理论考试题库(四选一) ▲自动档、手动档合而为一 ▲特别设计太阳炫目训练场景▲多种特殊气候训练 ▲原地驾驶(换档训练)▲加油站、收费站等训练场景▲操作信号实时显示▲ 30台驾驶舱联网训练
ADAS(高级驾驶辅助系统)高级驾驶辅助系统(Advanced Driver Assistant System),简称ADAS,是利用安装于车上的各式各样的传感器,在第一时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,以引起注意和提高安全性的主动安全技术。ADAS 采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。早期的ADAS 技术主要以被动式报警为主,当车辆检测到潜在危险时,会发出警报提醒驾车者注意异常的车辆或道路情况。对于最新的ADAS 技术来说,主动式干预也很常见。ADAS通常包括以下17种用与汽车驾驶辅助的系统: 1、导航:导航是一个研究领域,重点是监测和控制工艺或车辆从一个地方移动到另一个地方的过程。导航领域包括四个一般类别:陆地导航,海洋导航,航空导航和空间导航。 2、时交通系统TMC:TMC是是欧洲的辅助GPS导航的功能系统。它是通过RDS方式发送实时交通信息和天气状况的一种开放式数据应用。借助于具有TMC功能的导航系统,数据信息可以被接收并解码,然后以用户语言或可视化的方式将和当前旅行路线相关的信息展现给驾驶者。 3、电子警察系统ISA:我国道路交通管理系统中的“电子警察”是随着科技的发展而产生的,是一个时代的产物。它作为现代道路交通安全管理的有效手段,可以迅速地监控、抓拍、处理交通违章事件,迅速地获取违章证据,提供行之有效的监测手段,为改善城市交
通拥堵现象起到了重要的作用,已成为道路交通管理队伍中必不可少的一员,以充分发挥它准确、公正的执法作用。 4、车联网(Internet of Vehicles):车联网是由车辆位置、速度和路线等信息构成的巨大交互网络。通过GPS、RFID、传感器、摄像头图像处理等装置,车辆可以完成自身环境和状态信息的采集;通过互联网技术,所有的车辆可以将自身的各种信息传输汇聚到中央处理器;通过计算机技术,这些大量车辆的信息可以被分析和处理,从而计算出不同车辆的最佳路线、及时汇报路况和安排信号灯周期 5、自适应巡航ACC(Adaptivecruise control):自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。自适应巡航控制系统在控制车辆制动时,通常会将制动减速度限制在不影响舒适的程度,当需要更大的减速度时,ACC控制单元会发出声光信号通知驾驶者主动采取制动操作。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。 6、车道偏移预警系统LDWS(Lanedeparture warning system):车道偏离预警系统是一种通过报警的方式辅助驾驶员减少汽车因车道偏离而发生交通事故的系统。车道偏离预警系统由图像处理芯片、控制器、传感器等组成。
《汽车驾驶智能模拟培训系统》 教学课程 第一阶段汽车驾驶预备与机件的正确操作 第一课汽车驾驶预习 1-1 上汽车的动作要领 1-2 下汽车的动作要领 1-3 座位的调整 1-4 调整视镜 1-5 保持良好的驾驶姿势 1-6 驾驶操作装置 1-7 辅助操纵装置 1-8 工作状况监控装置 1-9 发动机的起动与停熄 第二课车体的感觉(停止时) 2-1 车体整体感觉 2-2 视线盲区 第三课汽车的起步与停车 3-1 平路起步 3-2 起步安全状况的确认 3-4 半联动的操纵技法 第四课汽车的变速与操作 4-1 汽车动力与汽车速度 4-2 汽车的加速过程
4-3 汽车加速操作技法 4-4 逐级加档 4-5 加档时机的确认与操作技法 4-6 汽车的减速过程 4-7 选择减档 4-8 减档时机的确认与档位的选择 第五课行驶速度的调节 5-1 油门踏板调节车速的运作技法 5-2 制动踏板调节车速的运作技法 5-3 离合器踏板调节车速的运作技法 第六课车体的感觉训练 (行驶中) 6-1 内轮差与外轮差的轨迹感觉 6-2 车在路面上的位置感觉 6-3 立体障碍物的左侧方通过 6-4 速度的感觉 6-5 运行中的视觉特性 第七课方向的控制与操作方法 7-1 直线行驶方向的控制与操作 7-2 曲线行驶时车轮迹的合理选择 第八课制动控制的操作技法 8-1 预见性制动的操作技法 8-2 定点制动的操作技法 第九课综合驾驶练习 9-1 第一套驾驶技法练习操(单独动作操作练习)
9-2 第二套驾驶技法练习操(协调动作操作练习) 9-3 汽车驾驶技法练习操(连贯练习) 第二阶段履行法规驾驶与汽车的准确调控第一课道路通行的区分 1-1 分道行驶原则 1-2 交通标志的确认 第二课行进路线的变更 第三课交叉点的通过技法 2-1 交通标志的确认 2-2 直行的通过技法 2-3 右转弯的通过技法 2-4 左转弯的通过技法 2-5 交通路口的优先通过 第四课狭窄路的通过技法 3-1 N字形的通过技法 3-2 S形通过技法 第五课坡道的通过技法 第六课铁路道口的通过技法 第七课驻停车的基本技法 7-1 驻车条件的选择 7-2 纵列驻车的操作技法 7-3 入库驻车的操作技法
A D A S(高级驾驶辅助系统) 高级驾驶辅助系统(Advanced Driver Assistant System),简称ADAS,是利用安装于车上的各式各样的传感器,在第一时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,以引起注意和提高安全性的主动安全技术。ADAS 采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。早期的ADAS 技术主要以被动式报警为主,当车辆检测到潜在危险时,会发出警报提醒驾车者注意异常的车辆或道路情况。对于最新的ADAS 技术来说,主动式干预也很常见。ADAS通常包括以下17种用与汽车驾驶辅助的系统: 1、导航:导航是一个研究领域,重点是监测和控制工艺或车辆从一个地方移动到另一个地方的过程。导航领域包括四个一般类别:陆地导航,海洋导航,航空导航和空间导航。 2、时交通系统TMC:TMC是是欧洲的辅助GPS导航的功能系统。它是通过RDS方式发送实时交通信息和天气状况的一种开放式数据应用。借助于具有TMC功能的导航系统,数据信息可以被接收并解码,然后以用户语言或可视化的方式将和当前旅行路线相关的信息展现给驾驶者。 3、电子警察系统ISA:我国道路交通管理系统中的“电子警察”是随着科技的发展而产生的,是一个时代的产物。它作为现代道路交通安全管理的有效手段,可以迅速地监控、抓拍、处理交通违章事件,迅速地获取违章证据,提供行之有效的监测手段,为改善城市交通拥堵现象起到了重要的作用,已成为道路交通管理队伍中必不可少的一员,以充分发挥它准确、公正的执法作用。 4、车联网(Internet of Vehicles):车联网是由车辆位置、速度和路线等信息构成的巨大交互网络。通过GPS、RFID、传感器、摄像头图像处理等装置,车辆可以完成自身环境和状态信息的采集;通过互联网技术,所有的车辆可以将自身的各种信息传输汇聚到中央处理器;通过计算机技术,这些大量车辆的信息可以被分析和处理,从而计算出不同车辆的最佳路线、及时汇报路况和安排信号灯周期 5、自适应巡航ACC(Adaptivecruise control):自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。自适应巡航控制系统在控制车辆制动时,通常会将制动减速度限制在不影响舒适的程度,当需要更大的减速度时,ACC控制单元会发出声光信号通知驾驶者主动采取制动操作。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。
1、申请小型汽车、三轮汽车驾驶证的,年龄应在18周岁以上70周岁以下。 2、有吸食、注射毒品后驾驶驾车行为的机动车驾驶人,不会被注销驾驶证。 3、社会车辆距离消防栓或者消防队(站)门前30米以内的路段不能停车。 4、驾驶机动车在道路上追逐竞驶,情节恶劣,会受到什么处罚? A、处拘投,并处罚金 B、处管制,并处罚金 C、处1年以上徒刑 D、处6个月徒刑 5、机动车购买后尚未注册登记,需要临时上道路行驶的,可以凭什么临时上道路行驶? A、合法来源凭证 B、临时行驶车号牌 C、借用的机动车号牌 D、法人单位证明 6、驾驶机动车下陡坡、转弯、掉头时,最高速度不能超过多少? A、30公里/小时 B、40公里/小时 C、50公里/小时 D、60公里/小时 7、驾驶人因服兵役、出国(境)等原因无法办理审验时,延期审验期限最长不超过多长时间? A、1年 B、2年 C、3年 D、5年 8、驾驶人在道路上醉酒驾驶机动车的处3年以上有期徒刑。 9、驾驶机动车超车后应立即开启右转向灯驶回原车道。 10、违反交通信号灯通行的一次记6分。 11、在这段高速公路上行驶的最高车速是多少? A、120公里/小时 B、100公里/小时 C、90公里/小时 D、60公里/小时 12、道路交通事故中,机动车无号牌、检验合格标志、保险标志时,要保护现场并立即报警。 13、公安机关交通管理部门对累积记分达到规定分值的驾驶人怎样处理? A、依法追究刑事责任 B、处15日以下拘留 C、终生禁驾 D、进行法律法规教育,重新考试 14、如图所示,驾驶机动车遇到这种情况能够加速通过,是因为人行横道没有行人通过。
15、发生交通事故时,下列哪种情况下当事人应当保护现场并立即报警? A、未造成人员伤亡的 B、未发生财产损失事故 C、未损害公共设施及建筑物的 D、驾驶人有酒后驾驶嫌疑的 16、机动车发生财产损失交通事故,对应当自行撤离现场而未撤离的,交通警察不可以责令当事人撤离现场。 17、驾驶人在机动车驾驶证的6年有效期内,每个记分周期均未达到12分的,换发10年有效期的机动车驾驶证。 18、大型客车、牵引车、城市公交车、中型客车、大型货车驾驶人应当每两年提交一次身体条件证明。 19、驾驶机动车在夜间超车时怎样使用灯光? A、变换远、近光灯 B、开启雾灯 C、开启远光灯 D、关闭前大灯 20、驾驶证审验内容不包括以下哪一项? A、道路交通安全违法行为、交通事故处理情况 B、身体条件情况 C、道路交通安全违法行为记分及记满12分后参加学习和考试情况 D、机动车检验情况 21、驾驶机动车通过漫水路时要加速行驶。 22、交通肇事致一人以上重伤,负事故全部或者主要责任,并具有下列哪种行为的,构成交通肇事罪? A、未带驾驶证 B、未及时报警 C、严重超载驾驶的 D、未抢救受伤人员 23、行至漫水路时,应当怎样做? A、空挡滑行 B、低速通过涉水路段 C、高速通过,减少涉水时间 D、高挡位低速通过 24、遇前方路段车道减少,车辆行驶缓慢,为保证安全有序应该怎样做? A、依次交替通行 B、穿插到前方排队车辆中通过 C、加速从前车左右超越 D、借对向车道迅速通过 25、机动车驾驶证遗失、损毁无法辨认时,机动车驾驶人应当向机动车驾驶证核发地车辆管理所申请补发。 驾驶员试题网https://www.doczj.com/doc/8711103803.html,驾驶员考试 26、路中心黄色虚线的含义是分隔对向交通流,在保证安全的前提下,可越线超车或转弯。
2020汽车驾驶员(技师)模拟考试 1、【判断题】()进行供油提前角调整时,第一缸活塞应处在排气行程上止点。(×) 2、【判断题】()转向盘自由行程是指汽车保持直线行驶位置不动时,左右晃动转向盘的自由转动量。(√) 3、【判断题】()点火线圈断路会引起高压无火。(√) 4、【判断题】()驾驶和乘坐二轮摩托车须带安全头盔。(√) 5、【判断题】()气缸压力表主要用来测量气缸磨损程度。(×) 6、【判断题】()喷油提前角减小可使废气中的NOX的排量增加。(×) 7、【判断题】质量流量方式计量进气量的发动机是利用空气流量计间接测量吸入气缸的空气量。(×) 8、【判断题】目前投入使用的检测线大多是综合环保检测线。(×) 9、【判断题】()机动车在高速公路上行驶,倘若发生故障,应立即停车,并尽快进行修理。(×) 10、【判断题】()前轮定位一旦出现问题,将会导致前轮异常磨损。(√)
11、【判断题】电动汽油泵的功用是向燃油供给系统提供所需具有一定压力的汽油。(√) 12、【判断题】()汽车巡航是发动机最有利的转速范围内使汽车保持设定的车速不稳定行驶。(×) 13、【判断题】()自动挡汽车空挡滑行更为省油。(×) 14、【判断题】车速传感器用于检测自动变速器输入轴的转速。(×) 15、【判断题】三元催化反应器可将废气中的有害成分CO、NOX、HC转化为无害气体。(√) 16、【判断题】()一般情况下,诊断技术主要针对汽车使用性能;检测技术主要针对汽车故障。(×) 17、【判断题】制动尖叫主要发生在制动力大于行车惯性时。(×) 18、【判断题】物质定额管理包括储备定额管理和消耗定额管理。(√) 19、【判断题】汽车巡航控制装置能保持汽车稳定的行驶速度。(√) 20、【单选题】在安全行车教育中,需牢记吸烟、饮酒以及药物等对()的影响。( A ) A、行车安全 B、超车 C、判断 D、会车 21、【单选题】我国对汽油机汽车排放限值规定2000.1.1起生产的重型在用汽车怠速工况下HC排放限值为()10-6。( D )
汽车驾驶模拟器的研究方法及步骤 一、虚拟现实建模方法 1、几何建模 2、运动建模 (1)物体位置 物体位置包括物体的移动、旋转和缩放。在视景仿真中,不仅需要一个全局性的绝对坐标,每个三维对象都需要建立一个相对坐标。对每个对象都给予一个坐标系统,称之为对象坐标系统,这个坐标系统原点的位置随物体的移动而改变。在虚拟驾驶系统中就是通过控制一个汽车局部坐标系的运动和变化来模拟汽车的运动过程。 (2)碰撞检测 在视景仿真系统中,经常需要检查对象A是否与对象B碰撞。碰撞检测需要计算两个物体的相对位置。许多视景仿真系统在实时计算中都是采用OBB包围盒检测法,运用这种方法可以节省时间,但降低了精确性。 3、物理建模 虚拟对象物理建模包括定义对象的质量、重量、惯性、表面纹理、光滑或粗糙、硬度、形状改变模式(橡皮带或塑料)等,这些特性与几何建模和行为规则结合起来,形成了更真实的虚拟物理模型。 4、行为建模 在虚拟驾驶系统中,行为建模主要包括两个方面,一方面是对驾驶员所操纵的汽车的行为进行约束,建立汽车操纵模型,使其符合汽车自身的运动和驾驶人员的操作步骤;另一方面是对场景中非受控物体的行为进行建模,使其的运动符合自然规律,比如场景中自动运行的汽车、路旁的行人等。 5、模型分割 二、虚拟驾驶系统各模块功能分析和开发方案确定 1、汽车虚拟驾驶系统的构成 汽车虚拟驾驶系统主要由虚拟驾驶操作输入系统、汽车动力学模型、运动仿真模型、实时操纵模型、场景管理管理平台、视景和声音渲染输出以及汽车数据模型库、场景模型库和声音模型库等组成。其中汽车动力学模型、运动仿真模型、实时操纵模型和虚拟驾驶场景管理平台是汽车虚拟驾驶系统的核心子系统。 系统的工作过程如下:在系统初始化时,根据用户的需求从汽车数据模型库中将用于仿真的车辆数据模型调入到动力学模型中,同时选择运行的三维场景,通过模型解析模块把它从场景数据库中调入场景管理平台;在仿真过程中,驾驶人员通过虚拟驾驶操作输入系统进行模拟驾驶操作,人机交互接口将油门、制动、换档和转向等动力学操作信息以及发动机启动、喇叭鸣笛等按钮操作状态送入汽车动力学模型和实时操纵模型中;经过仿真计算后,汽车运动仿真数据被送入运动摄像机模块中控制场景内摄像机的运动,同时汽车的行驶姿态还受到地面因素的影响;然后,场景管理控制模块根据此时摄像机的运动状态,通过视景渲染模块将三维场景在投影屏幕上实时反映出来,模拟视景变化,形成行车体感,并且通过虚拟仪表输出此时的汽车运行参数。另外,为了增强虚拟驾驶的沉浸感,系统还安装有音响系统,
ZG-DG6型动感汽车驾驶模拟器(六自由度) 一、ZG-DG6型4D动感驾驶模拟器系统组成: ZG-DG6型4D动感驾驶模拟器由模拟驾驶舱、视景模拟驾驶软件、数据采集系统、六自由度运动平台、微型控制器、伺服驱动系统等组成(如下图)。二、ZG-DG6型4D动感驾驶模拟器六自由度运动平台: 六自由度平台系统由Stewart机构的六自由度运动平台、计算机控制系统、驱动系统等组成。下平台安装在地面的固定基座基上,上平台为支撑平台。计算机控制系统通过协调控制电动缸的行程,实现运动平台的六个自由度的运动,实现前后平移、左右平移、上下垂直运动、俯仰、滚转和偏航及复合运动。 三、ZG-DG6型4D动感驾驶模拟器产品特点: 3.1、动感平台结构稳定,设计合理,科技先进,质量有保障,部件耐磨性强,适合于长时间运行; 3.2、4D动感矢量合力智能模拟技术实现,让你在驾驶中随时感受前后左右四个方向实时变化,沉浸于驾车的状态中; 3.3、还原各种路况效果,驾驶者可以体验路面颠簸起伏造成的垂直方向的失重或超重带来的冲击力; 3.4、最新采用二自由度电动缸动感平台设计原理,改善了液压、气动和电动推杆驾驶模拟器的成本高、笨重动态。 四、ZG-DG6型4D动感驾驶模拟器软件: 新版汽车驾驶模拟器软件符合“公安部123号令”考评规则。小车(科目二)场地5项,分别为:倒车入库、坡道定点停车和起步、侧方停车、曲线行驶、直角转弯;大车(科目二)场地16项,分别为:桩考、坡道定点停车和起步、侧方停车、通过单边桥、曲线行驶、直角转弯、通过限宽门、通过连续障碍、起伏路行驶、窄路掉头、模拟高速公路、连续急弯山区路、隧道、雨天、雾天湿滑路、紧急情况处置。新版汽车驾驶模拟器软件道路驾驶技能考试(科目三)内容包括:上车准备(系安全带)、起步、直线行驶、加减挡位操作、变更车道、靠边停车、直行通过路口、路口左转弯、路口右转弯、通过人行横道线、通过学校区域、通过公共汽车站、会车、超车、掉头、夜间行驶等训练考试项目。产品完全符合“中
驾驶技能体验:初中篇 各专业爱好者 基础模块:汽车模拟驾驶 体验地点:模拟驾驶器体验馆(B108座) 实际体验: 知识体验: 一、驾驶员行车文明与安全 通过体验,使学员养成安全礼让、文明驾驶的道德意识。 体验内容: 一个合格的驾驶员,不仅表现在技术的娴熟上,更重要的是应该具有良好的驾驶作风、作为习惯和道德修养;良好的驾驶人道德,是安全行车的先决条件. (一)、良好的驾驶员要注意自己的道德修养,养成良好的行为习惯;驾驶员之间应该相互学习、互相帮助,取长补短,安全行驶;对其他驾驶员善意提醒,应虚心学习,认真听取。在一些细小的做法上都要注意良好行为习惯的养成。如:驾驶员在驾驶过程中,将痰吐到随身携带的废纸中,停车后扔入垃圾箱中;把废纸和其他废弃物扔到随车携带的垃圾箱或等车辆停止后扔到到路边的垃圾箱内;选择车辆清洗点清洗自己驾驶的车辆时,不仅考虑保持车辆外观整洁,还要保持周围的环境整洁等。 (二)、安全礼让 驾驶员在行车中,经常会遇到违章行驶,占道抢行,强行超车等不文明的驾驶行为。此时,驾驶员应正确处理好有理与无理的关系,要宽容、大度和注意礼让;经常保持冷静的心态,“宁可有理让无理,不可无理对无理”,尽量避免引起事端。 1.发现前方道路或路口赌塞,应按顺序减速或停车,等前方路口疏通后或前方车辆开始行驶时,在尾随继续行驶。 2.与其他人员发生争执时,应该耐心分辨,不要带着情绪驾车。 3.与违章超车和强行占道行驶的车辆应注意避让。 (三)助人为乐 1.行车中,发现有需要援助的车辆时,应该减速停车,给对方予以帮助。 2.发现其他车辆陷入损坏路段而不能行驶时,应尽力给予帮助。 3.遇其他驾驶人向自己询问路线时,应耐心回答,实事求是。 4.发现其他驾驶人行驶的路线不正确时,应及时提醒,耐心回答和解释。
三屏汽车驾驶模拟器 介绍
ZG-601A3P型主被动式三屏汽车模拟器 一、ZG-601A3P型主被动式三屏汽车模拟器产品概述: 座舱外壳材质:驾驶座舱采用ABS外壳用模具一次铸造成型,无小块拼接,防潮防裂,坚固耐用,永不变型;外观简洁大方、时尚亮丽。五大操作件及仪表台采用真车实件配置,转向机构采用真车方向机总成构建,实车转数方向自动回位;档位外罩采用桑塔纳真车中央通道,具有真车实感。 变速器:采用桑塔纳实车变速箱总成。档位为:倒档、一档、二档、三档、四档、五档和空挡(自动档只含前进档、倒车档和驻车档)。 离合器:离合器采用实车压盘,实现半联动力感,离合器结合、分离、半联动状态感觉明显,分级输出。知名品牌真实汽车配件。 驾驶座舱:驾驶舱是由转向器、油门、离合器、脚刹车、手刹车等操纵机件及座椅等组成。组件必须是真车实物配件。环保,防火外壳。 传感器:信号为模拟量或数字量,输出变化时声音、视像同步变化(音量变化不少于5级),滞后小于50毫秒。有力度变化,力度均适合青少年儿童使用。 转向器:转向器转向范围不小于0-1060度(数字量分级不小于180脉冲/圈),反应灵敏,能够自动回正。油门、刹车信号分级输出,不少于5级,或无级输出。 汽车座椅:专业汽车座椅、美观、耐用。前后可调,适合青少年及儿童使用。 (公司可根据客户要求订做:奥迪、帕萨特、富康、捷达、长安逸动、宝来、北汽勇士、东风猛士、南京依维柯、东风EQ1118/1121/1122/1141、解放CA1121/1122/1141、斯太尔、猎豹、陕汽等车型) 二、ZG-601A3P型主被动式三屏汽车模拟器软件概述: ZG-601A3P型主被动式三屏汽车模拟器软件是我公司在2017年新款软件,全角度视角,画面清楚真实感强,功能强大,外观时尚,配有3台32寸液晶显示器,带有主被动式练习训练功能。整体画面宽大逼真,它突破了原来在行驶十字路口向左拐的视线盲区,在驾驶过程中能清楚看到左右两侧交通状况,训练时更加方便自如,从而清楚的观察车辆与路面的位置关系;并新增加“公安部123号令场地考试项目。” ZG-601A3P型主被动式三屏汽车模拟器完全符合“中华人民共和国公安部 令第123 号令”及教育部新的国家机动车驾驶员训练大纲要求,小型汽车、小型自动挡汽车、残疾人专用小型自动挡载客汽车和低速载货汽车场地5项必考;大型客车、牵引车、城市公交车、中型客车、大型货车场地16项必考,产品具有自主知识产权。
HUD抬头数字显示系统 随着技术的发展进步,运用于汽车上的驾驶辅助系统越来越多,主要有自适应巡航系统(ACC)、防抱死制动系统(ABS)、刹车辅助系统(BAS)、车道保持辅助系统(LKAS)、交叉口驾驶辅助系统(IAS)、车道偏离预警系统(LDWS),车辆防撞预警系统(AWS)等等,这些驾驶辅助系统在现今许多款车上都得到了广泛的运用,不仅通过辅助驾驶人,提高了驾驶安全,而且对行人以及整个交通系统的安全都产生了很大的影响。本文就HUD抬头数字显示系统做以简单的介绍。 一:功能 抬头数字显示仪(Heads Up Display),风窗玻璃仪表显示,又叫平视显示系统,它可以把重要的信息,映射在风窗玻璃上的全息半镜上,使驾驶员不必低头,就能看清重要的信息。这种显示系统,原是军用战斗机上的显示系统,飞行员不必低头,就能在风窗上看到所需的重要信息。目前,一些高级汽车把它移植到汽车上来。 二:原理 HUD原是军用战斗机上的显示系统,它是一款半智能化投射显示系统,HUD 利用光学反射,将重要的飞行相关信息投射在一片玻璃上面。这片玻璃位于座舱前端,文字和影像被投射在镀膜镜片(析光镜) 并平衡反射进飞行员的眼睛。 飞行员透过HUD往前方看的时候,能够轻易的将外界的景象与HUD显示的资料融合在一起。由于反射进眼睛中的影像永远与飞机的中轴平衡,所以飞行员的身高不会对俯仰角或目视瞄准造成偏差。HUD设计的用意是让飞行员不需要低头查看仪表的显示与资料,始终保持抬头的姿态,降低低头与抬头之间忽略
图(1)抬头显示系统用于汽车 外界环境的快速变化以及眼睛焦距需要不断调整产生的延迟与不适。 HUD的前身是使用在战斗机上的光学瞄准器,这种瞄准器利用光学反射原理,将环状的瞄准圈光网投射在装置在座舱前端的一片玻璃或者是座舱罩上面,投射的影像对于肉眼的焦距是定在无限远的距离上面,当飞行员瞄准目标的时候不会妨碍到眼睛的运作,维持清晰的显示。这种瞄准器最早出现是在第一次世界大战期间,到了二战的时候开始被广泛利用。 HUD不是单纯的放大显示系统,而是一种半智能化的系统,通过计算机模拟计算,将预估、处理后的信息显示出来。HUD诞生的最重要关键是模拟计算机开始运用在飞机上。因为显示在HUD上的文字或者是图形需要经过处理之后产生,传统仪表产生的讯号无法直接使用在HUD的显示需求上,必须透过计算机处理转换之后,将需要的资料传递给HUD的显示单元,再将影像投射到前方的玻璃上。 现有HUD系统也不是单一的一个电子系统,其成像的关键是在光学和材料学方面,一种透明的高折射率镀膜才是其真正的成像根基。
汽车辅助驾驶统计 驾驶员辅助系统可以涵盖的功能有很多,包括:车道辅助、行车辅助、停车与操作辅助、避让辅助、转向与穿行辅助、照明与视野辅助等 博世驾驶员辅助系统涵盖了市场的需求与趋势,在必配功能方面包括自动紧急制动、车辆偏离警告等,标准功能包括自适应巡航、智能大灯控制等,除此之外还提供一些差异化功能如交通拥堵辅助、狭窄道路辅助等。 大陆集团的高级驾驶员辅助系统基于雷达、摄像机和红外传感器可以实现以下功能:紧急制动辅助;自适应巡航控制;车道偏离警告;智能前大灯控制;交通标志辅助;盲点探测和360度环绕检测(全景图)。 欧洲新车评价规程(EuroNCAP)规定,自2014年起,新车型必须装配相关驾驶员辅助系统才能获得五星安全评定。被列入配备选项的系统包括自动紧急制动、智能速度辅助、车道偏离警告或车道保持支持。
第一章浅析博世驾驶员辅助系统 ACC自适应巡航控制系统 ACC自适应巡航系统可以在道路中自动控制车速并保持与前车的距离。ACC使用雷达传感器发射电波并接收前方物体反射回的电波,根据反射回来的信号,ACC通过计算与相对距离、相对方位和相对速度来探测前方车辆,以作出加速或制动的判断。ACC可在车速约30km/h以上被激活,而停走型ACC可在静止时即可启用。 在ACC系统中,雷达传感器是最核心的部件。博世目前有两种雷达,一种为中距离雷达(MRR),可以探测160米的距离,可支持ACC最高巡航速度为150km/h,目前第七代高尔夫顶配车型上所使用的ACC系统就搭配了这款雷达,
性价比较高;博世长距离雷达(LRR)可以探测250米的距离,可支持ACC最高巡航速度为200km/h,如果该ACC系统搭配了多功能摄像头,最高巡航速度可达250km/h。奥迪A6L的停走型ACC在传统雾灯的位置装配了两部LRR,增加了探测的范围和距离。 ACC系统使用雷达传感器和多功能摄像机作为信息采集和输入端,可以在驾驶员不操作油门和刹车的情况下自动保持车距巡航,当前方车辆出现减速时随之刹停,而前方车辆离开时可自动加速至理想速度,在一定程度上接近了自动驾驶技术。不过,ACC并不能对车辆方向进行调整。 车道辅助系统/紧急制动系统 博世LDW车道偏离警告系统和LKS车道保持系统使用了一台多功能摄像头(MPC)进行车道线的识别,当系统识别到车道线时,自动进入工作状态。如果车辆在行驶中偏离了车道,且没有打转向灯,首先LDW会输出警告信号,而选择什么样的警告方式(如声音、仪表视觉符号以及方向盘振动等)由整车厂进行设定。如驾驶员没有回应,LKS系统将通过EPS电子转向系统在方向盘上施加大约3牛·米的力矩,以帮助车辆回到正确的车道上来。在这个过程中,如果驾驶员打方向灯或者大角度转动方向盘,则系统默认车辆由驾驶员接管而停止干预。
驾驶辅助系统 前言 驾驶辅助系统是当前国际智能交通系统研究的重要内容,它是利用机器视觉和传感器技术实现对驾驶员周围环境状况实时通报,并在本车可能发生潜在危险时及时警示驾驶员采取有效措施,消除事故隐患。 驾驶辅助系统有车道保持辅助系统、自动泊车辅助系统、刹车辅助系统、行车辅助系统、车辆红外线夜视辅助系统等。 1.车道保持辅助系统 车道保持辅助系统可以帮助司机将车辆保持在原车道上行驶。借助一个摄像头识别行驶车道的标志线。如果车辆接近识别到的标记线并可能脱离行驶车道,系统会通过方向盘的振动提醒驾驶员注意。如果车道保持辅助系统识别到本车道两侧的标记线,系统处于待命状态。如果在车辆横过车道边界线之前拨动了转向灯,系统就不会给出振动提醒,因为系统认为这是驾驶员需要变道。在接近或者横过识别出的车道边界线时,会产生振动,并且这种振动提醒只发生一次。车道保持辅助系统是为高速公路和主干线公路而设计的,所以该系统在车速高于约65km/h时才会工作。环境条件恶劣时,比如车道脏污或者覆盖着雪、车道过窄、车道边界线不清晰(如高速公路施工时)该系统暂时会不工作,系统当前的工作状态会显示在组合仪表上。 2.自动泊车辅助系统 倒车辅助系统以图像、声音的直观形式告知驾驶者车与障碍物的相对位置,解除因后视镜存在盲区带来的困扰,从而为驾驶者倒车泊车提供方便,消除安全隐患。按所使用的传感器不同,倒车辅助系统可分为红外线式、电磁感应式和超声波式。红外线式的最大缺点是红外线易受干扰,对深黑色粗糙表面物体的反应不灵敏。并且,如果红外线发射器或接收器表面被一层薄薄的冰雪或泥尘覆盖,系统就会失效。电磁感应式的倒车辅助系统其检测稳定性和灵敏度比红外线提高许多,其缺点是只能动态检测障碍物。超声波与机器视觉配合式的倒车辅助系统使用超声波传感器检测障碍物,并能结合摄像头自动识别停车线,当汽车自动检测好停车位置和距离时,只要驾驶者按下确认键,该系统就会自动泊车。 自动泊车辅助系统的基本原理是通过车身前后和侧面的多个传感器,来测算车位的大小、距离以及准确的入位角度。系统对车辆和车位都有要求:首先车辆必须装有倒车影像功能的屏幕,其次,在停车时,车位的大小不应小于车身总长加2米的长度,而倒车时,与旁边车辆的横向距离应该保持在0.5-1.5 m之间。选择好车位就可以泊车。将车摆放好挂入倒档后,倒车影像屏幕会自动显示出你所在的位置和周围环境,这时用户在触摸屏式导航仪上,通过移动光标来设定泊车的目标位置,同时启动智能泊车系统。系统一旦启动会自行旋转转向盘,然后缓慢进行倒车,最后将车辆停在泊车位置附近。驾驶者可以在注意周围有无障碍物的同时,控制油门或制动调整泊车过程。目前,自动泊车系统还存在一些局限,随着技术不断改进,将对泊车起始点的要求减弱,车位侦测速度和精度得到提高,泊车过程运行更加平稳快捷等。 3.制动辅助系统 制动主要包括电磁制动,电子液压制动,电子机械制动。制动系统的技术有:EBA
第36卷第3期2002年5月 浙 江 大 学 学 报(工学版) Jo ur nal o f Zhejiang U niv ersity(Eng ineer ing Science) Vol.36No.3May 2002 收稿日期:2001-05-13. 作者简介:蔡忠法(1969-),男,浙江温岭人,讲师,主要从事电子技术和系统仿真的研究.E-m ail:z fcai@m https://www.doczj.com/doc/8711103803.html, 汽车模拟驾驶模型与仿真的研究 蔡忠法,章安元 (浙江大学电气工程学院,浙江杭州310027) 摘 要:在主动型驾驶模拟训练系统中,模拟驾驶舱各个操纵机构存在着多输入、多耦合、非线性的控制作用,而驾驶模拟训练要求驾驶动力学模型适于快速实时仿真.本文使用拟合多项式描述汽车发动机负荷特性,提出结构简化的汽车速度和方向控制模型.对模拟驾驶的仿真结构和学员操作的逻辑判断进行了讨论,通过对操纵机构输入的线性化处理,得到汽车行驶的仿真模型并选择快速仿真算法实现了所建模型.实验结果表明,本文提出的理论模型和仿真算法是正确可行的.关键词:汽车驾驶;模拟器;模型;仿真 中图分类号:T P312 文献标识码:A 文章编号:1008-973X(2002)03-0327-04 Study of automobile emulated driving model and simulation CAI Zhong -fa ,ZHANG A n -yuan (College of Electr ical Eng ineer ing ,Zhej iang U niv er sity ,H angz hou 310027,China ) Abstract :In active automo bile driving training simulato r,the steering framewo rk in the simulated cabin has multi-input,m ulti-co upling and non-linear contro l effect.A driving training sim ulator r equires dynam ic model suitable for fast real -tim e simulation .T his paper uses poly nom ials to express the load characteristics of the automo bile engine ,and presents simplified -str ucture velocity and direction co ntro l models .T he sim ulation structure o f simulated driving and log ic alestimation o f driver oper ation are discussed,and illegal operation of driver and car backing state are judged cor rectly.T hr oug h the linearization process of the steering fr am ew or k input function ,sim ulation models for m ultiple driving cases w ere derived and effectiv e algo rithm w as selected to realize the models.Ex periment results show ed that the presented m odel and simulation alg orithm are corr ect and feasible. Key words :automo bile driving ;simulator ;model ;simulation 汽车驾驶模拟训练系统是通过模拟驾驶舱和计算机实时生成汽车行驶过程中虚拟的视境、音响等驾驶环境,训练正确的驾驶操作.它可取代实车训练中的部分科目和内容,有利于驾驶培训正规化、科学化和规范化,并具有节能、安全、经济、高效等优点,因此,开发适合我国交通国情和道路状况的汽车驾驶模拟训练系统具有重大的社会效益和经济效益.而建立并实现汽车模拟驾驶的动力学模型是研制汽车驾驶模拟训练系统的前提.以往的汽车动力学模型主要是通过汽车部件建模,因而结构复杂,计算时 间长[1] .在基于微机平台的主动型汽车驾驶模拟训练系统中,需建立适合快速实时仿真、结构简化的汽车行驶速度和方向控制模型,以确定汽车行驶的世界坐标位置,控制图形生成系统动态生成虚拟视景.在主动型汽车驾驶模拟训练系统中,图形实时生成系统占据了大部分CPU 时间,因此需要在模型的逼真度与复杂性之间作一折中.为了满足模拟训练的要求,简化模型结构和选择合适的快速仿真算法是实现驾驶实时仿真所必须首先考虑的问题.
汽车驾驶模拟器
汽车驾驶模拟器,是根据实车的操作方法,结合新一代实时场景系统。各操作方法与真车无异,视觉效果采用计算机实时成像、采用图形运算加速和高速显示系统,视景仿真系统可以生成高质量的三维立体的道路驾驶场景,能实时模拟汽车驾驶的运行环境和操作效果,包括各种交通地形,来往的各种车辆,立体的山脉,流动的白云,栩栩如生的树木,各种天气状况。声音采用计算机语音合成技术,能逼真模拟汽车行进中的各种机械动力声、喇叭声、周围环境声,雨雪天气伴有下雨下雪和刮风声等,具备了视觉和听觉的实时模拟功能。具有很强的身临其境的感觉,教员根据教学任务选择不同的系统地形。 汽车驾驶模拟器由驾驶舱、显示器、汽车五大操作系统、核心计算机、高级进口传感器、数据采集板等组成,经数据传感板传输。具有操作真实感强,性能稳定可靠,功能齐全,音质图像效果好等特点,是各大专院校,汽车驾驶培训学校、部队及技能培训学校培训首选的产品。道路的模拟部分和标志标线全部按照国家交通法规设计、道路全部为国内道路。 一、界面仪表盘上显示有: 1、车速表; 2、发动机转速表; 3、大灯(远光灯、近光灯、视宽灯) 4、转向灯 5、安全带提示灯; 6、车门关闭提示灯 7、机油灯 8、电瓶警告灯等 9、在训练过程中、通过双击鼠标、可实现正视和俯视图像驾驶之间切换。 二、界面显示新增加有: 1、转向 2、油门 3、刹车 4、离合器深浅进度 5、档位 6、训练成绩 7、后视镜(左、右、中)
8、场景地图显示 三、汽车驾驶模拟系统界面里不同车型之间自由转换,其车型有: 1、小轿车 2、吉普车 3、无级变速车(自动档) 4、农用车 5、大货车 6、大客车 (车型多达六种学员可以在汽车驾驶模拟器上体会不同车型的驾驶体会与乐趣) 四、学员可以根据自己驾驶的熟练程度选项训练,分三级训练: 1、初级驾驶; 2、中级驾驶; 3、高级驾驶训练: (1)初级驾驶训练:初级驾驶可分为六种车型和三种练习方法,即1、被动驾驶;2、原地训练;3、简易道路等训练 (2)中级驾驶训练:可选择场景内的相应功能训练:车辆的数量、车型、道路、天气等。(3)高级驾驶训练:可选车辆的数量、车型、道路、天气及交通部规定的九项专项训练即:1通过连续障碍、2通过单边桥、3直角转弯、4侧方位停车、5上坡定点停车与坡道起步、6限速通过限宽门、7百米加减档、8起伏路驾驶、9曲线行驶等。场景内最多可达60辆其他车辆,达到模拟逼真的交通流状况。 训练气候面有:"炫目训练"、"白天"、"雪天"、"雾天"、"雨天"、"黑夜",体会不同天气状况下的驾驶特点(例如,晴天炫目道路训练有早上及傍晚的炫目驾驶;雪天路面极滑;雾天视线极其不好;夜间驾驶会车时要远近灯光的切换等)。 五、训练场景部分画面: 六、汽车驾驶模拟器主体构造: 一、模式: 被动式:被动式驾驶适用于初学的学员,学生可以按照电脑语音提示进行规范的操作练习。 主动式:主动式驾驶与实际车辆相同。 二、功能: 1、主视屏:显示驾驶前方道路与周围路况、使学生能感觉身在驾驶室操作着运行中的汽车。并显示档位、成绩分数。
汽车驾驶模拟器进重庆驾校每年节油180万升(图) 来源: 华龙网(重庆) 学员在汽车驾驶模拟器上模拟培训市运管局供图华龙网发 华龙网06月12日16时45分讯(记者刘艳)模拟起步、换挡、陡坡、下坡等多种模式,可真实体会到上车感受。今日,记者在渝举行的“第七届泛珠三角区域道路运输合作发展联席会议”上获悉,这种新的驾驶培训模式目前已在我市部分驾校试点。 模拟情景各种道路模式都有 据介绍,这种驾驶模拟器看起来就像一台大游戏机,实际是一台由电脑控制的汽车教学模型。模拟驾驶仪由方向盘、手制动、仪表台及仪表、座椅等组成,离合器为实车离合器,能明显结合、分离、半联动状态,驾驶舱和真实的车辆几乎没有区别。 “坐上驾车模拟器,你会看到前方有一个的电子屏幕。”相关负责人介绍,它利用最新的计算机技术,屏幕上可以实现真实的三维场景及逼真的声音模拟,更有雨天、冰雪天、陡坡、下坡等多种模式。模拟器还可以模拟高速公路、山区道路等因安全因素难以实现的驾驶培训教学活动。 模拟不会取代实车训练 有了模拟器,学习驾驶技术是不是就不需要实车培训了呢?该负责人表示,模拟训练不会取代实车训练。“模拟训练有一个优点,就是为实车训练打基础。” 据介绍,将模拟驾驶器引进学员的培训中,可让学员对各种可能遇上的情况有真实、感性的认识,既安全,又可以消除初学者的紧张心理。该负责人说,模拟训练为学员的实车训练打基础。 每年可节油180万升 使用汽车驾驶模拟器,更重要的目的还是节能减排。该负责人说,每位学员模拟训练10个小时,折算实车训练3个学时。按此算,每人操作培训10学时在模拟器上进行训练,
可节油30升,重庆每年培训学员约40万人,按下限值每年通过模拟驾驶器培训6万人算,则可节油180万升。 按计划,从今年起,将在重庆驾培行业推广安装200台模拟器。作者:刘艳 (本文来源:华龙网) 富阳驾校正式启用驾驶模拟器 来源: 富阳日报 日前,记者从市运管所获悉,驾训新课程模拟器项目已在我市驾校正式启用。学车的市民想要上路训练,必须先过模拟器这一关。为此,记者专门前往承担这一项目培训的桐江机动车驾驶员培训中心(以下简称桐江驾校)体验了一把。 动作一旦出错,系统立马提醒 记者了解到,桐江驾校目前共有20台驾驶训练模拟器,分处两室。其中,12台适于初级阶段学员的使用,主要通过图解教学来强化理论学习,让学员更加熟悉车内的构造;其余8台则在显示屏上模拟出行车中的复杂环境,学员坐在模拟器上,感觉就像行驶在车水马龙的真实道路上,人行横道线上还时不时有行人经过。 在教练的指导下,体验开始。记者选择了雨雪天模式,模拟器的屏幕上立即出现下雪天的效果,雪花大朵大朵地飘落下来,车前白茫茫一片,辅助教学系统语音提示“开启雨刮器”。记者刚要启动车子,电脑屏幕上就发出警告“未系安全带”;记者不断加档,当加到4档时,系统开始高声提醒“下雪天请控制车速”;当记者冲红灯后,电脑会提示“小心前方行人”、“冲了红灯”;由于雪天行驶速度过快,记者在一次转弯时车子打滑,撞到了路边的建筑物,翻了车,模拟器停止了运行。 模拟恶劣天气、高速公路培训 “夏天学车的学员无法体验到大雪等恶劣天气,而且学车时也不能到高速道路上行驶,但这些实地驾驶的经历对于驾驶员来说是必须掌握的。模拟器培训在一定程度上弥补了这一缺陷。”一位桐江驾校的教练说。 一位正在进行模拟器练习的张小姐对记者说,她是第一次用模拟驾驶器学车,“很好玩,如果让我直接开真车,我会很紧张,通过模拟以后再去开车,胆子应该会大很多”。