第一章静力学基础 一、是非题 1.力有两种作用效果,即力可以使物体的运动状态发生变化,也可以使物体发生变形。 () 2.在理论力学中只研究力的外效应。() 3.两端用光滑铰链连接的构件是二力构件。()4.作用在一个刚体上的任意两个力成平衡的必要与充分条件是:两个力的作用线相同,大小相等,方向相反。()5.作用于刚体的力可沿其作用线移动而不改变其对刚体的运动效应。() 6.三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。() 7.平面汇交力系平衡时,力多边形各力应首尾相接,但在作图时力的顺序可以不同。 ()8.约束力的方向总是与约束所能阻止的被约束物体的运动方向一致的。() 二、选择题 1.若作用在A点的两个大小不等的力 1和2,沿同一直线但方向相反。则 其合力可以表示为。 ①1-2; ②2-1; ③1+2; 2.作用在一个刚体上的两个力A、B,满足A=-B的条件,则该二力可能是 。 ①作用力和反作用力或一对平衡的力;②一对平衡的力或一个力偶。 ③一对平衡的力或一个力和一个力偶;④作用力和反作用力或一个力偶。 3.三力平衡定理是。 ①共面不平行的三个力互相平衡必汇交于一点; ②共面三力若平衡,必汇交于一点; ③三力汇交于一点,则这三个力必互相平衡。 4.已知F 1、F 2、F 3、F4为作用于刚体上的平面共点力系,其力矢 关系如图所示为平行四边形,由此。 ①力系可合成为一个力偶; ②力系可合成为一个力; ③力系简化为一个力和一个力偶; ④力系的合力为零,力系平衡。 5.在下述原理、法则、定理中,只适用于刚体的有。 ①二力平衡原理;②力的平行四边形法则; ③加减平衡力系原理;④力的可传性原理; ⑤作用与反作用定理。 三、填空题
1.1 沿水平方向前进的枪弹,通过某一距离s 的时间为t 1,而通过下一等距离s 的时间为2t .试证明枪弹的减速度(假定是常数)为 由题可知示意图如题1.1.1图: { { S S 2 t 1 t 题1.1.1图 设开始计时的时刻 速度为0v ,由题可知枪弹作匀减速运动设减速度大小为a .则有 :()()??? ??? ? +-+=-=2 21210211021221t t a t t v s at t v s 由以上两式得 1102 1 at t s v += 再由此式得 ()() 2121122t t t t t t s a +-= 1.26一弹性绳上端固定,下端悬有m 及m '两质点。设a 为绳的固有长度,b 为加m 后的 伸长,c 为加m '后的伸长。今将m '任其脱离而下坠,试证质点m 在任一 瞬时离上端O 的距离为 解 以绳顶端为坐标原点.建立如题1.26.1图所示坐标系. 题1.26.1图 设绳的弹性系数为k ,则有 kb mg = ① 当 m '脱离下坠前, m 与m '系统平衡.当m '脱离下坠前,m 在拉力T 作用下上升,之后作简运.运动微分方程为 ()y m a y k mg =-- ② 联立①② 得 b b a g y b g y +=+ ③ 0=+y b g y 齐次方程通解 t b g A t b g A Y sin cos 2 11+= 非齐次方程③的特解 b a Y +=0 所以③的通解b a t b g A t b g A Y +++=sin cos 2 11 代入初始条件:0=t 时,,c b a y ++=得0,21==A c A ; 故有 b a t b g c y ++=cos 即为m 在任一时刻离上端O 的距离. O m m ' T
2-3 圆盘绕杆AB 以角速度rad/s 转动,AB 杆及框架则绕铅垂轴以角速度 100=?10=ωrad/s 转动。已知mm ,当140=R °=90θ,rad/s ,时,试求圆盘上两相互垂直半径端点C 点及D 点的速度和加速度。 5.2=θ 0=θ 解:圆盘的运动是由三个定轴转动组成的复合运动,且三个轴交于O 点。取O 点为基点,建立动坐标系Oxyz ,Oxyz 绕铅垂轴以角速度ω转动,则牵连角速度e ω=?ωk 。圆盘相对于动坐标系的运动是由框架绕Ox 轴的转动和圆盘绕Oy 轴的转动组成,则圆盘的相对角速度为: r θ =?+?ωi j 所以圆盘的绝对角速度为: r θω′=?+??e ω=ω+ωi j k C 点及 D 点的矢径分别为: 0.140.5()C m =?+r i j 0.50.14()D m =+r j k 由公式可得C 点及D 点的速度: =×v ωr 5 1.412.75(/)C C m s ′=×=++v ωr i j k 190.35 1.25(/)D D m s ′=×=+?v ωr i j k 下面来求加速度。首先求圆盘相对于动系的相对角加速度ε,在动系中,我们可以步将 框架绕Ox 轴的转动看作牵连运动,牵连加速度为r 1e θ=?ωi 1r ,牵连角加速度为ε;将圆盘绕Oy 轴的转动看作相对运动,相对角速度为1e = θ =?j 0ωθ ,相对角加速度为。则根据角加速度合成公式并由此时1r 0==ε? e e r r =+×+εεωωε= 可得: 211250(/)r e r rad s θ =×=?×?=?εωωi j k 接下来求圆盘的绝对角加速度,再次利用角加速度合成公式,并由0e =ε可得: 2100025250(/)e r r rad s ′=×+=+?εωωεi j k 利用公式a 可得C 点及D 点的加速度 : (=×+××εr ωωr )
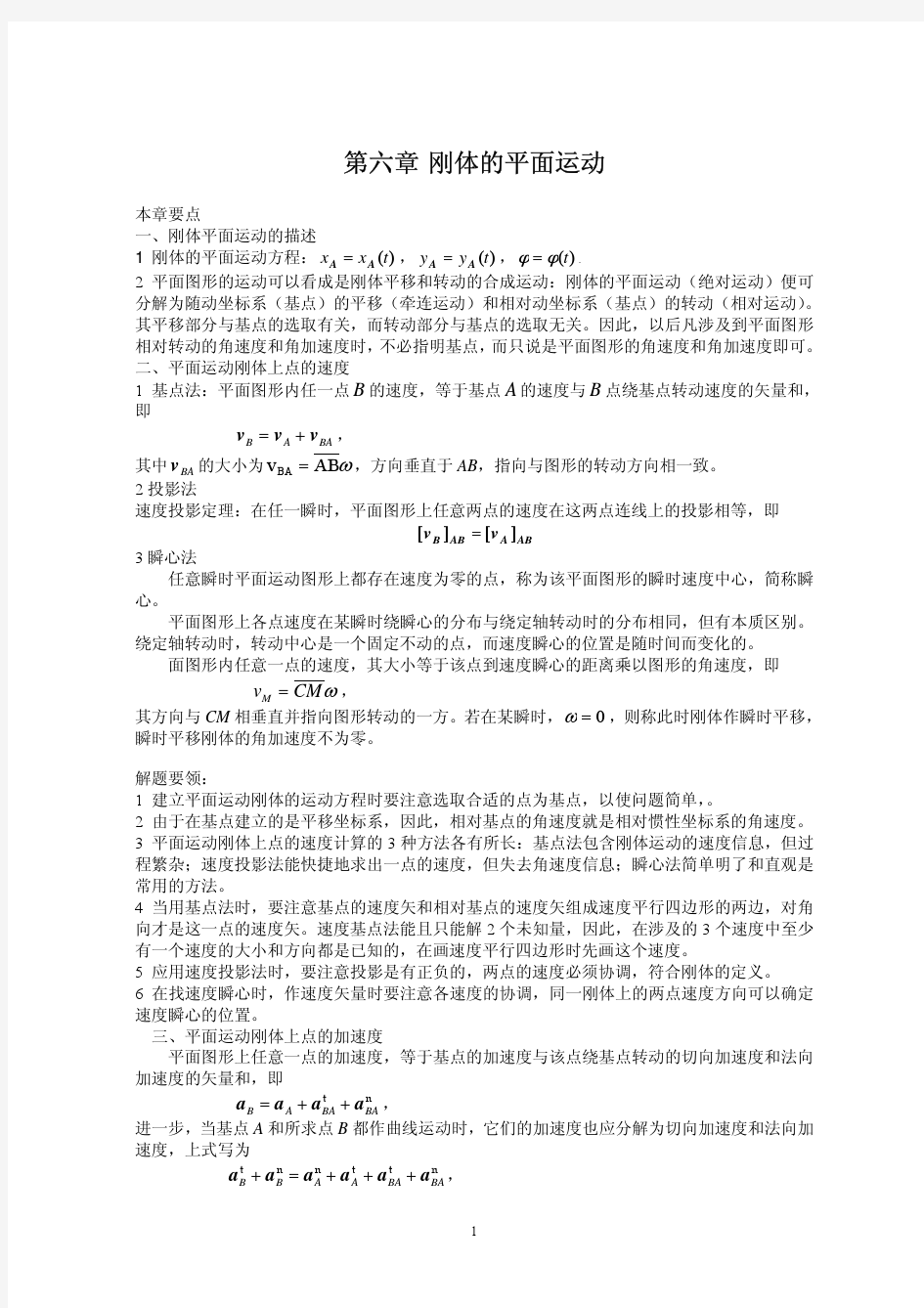
第6章 刚体的平面运动分析 6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0?= 0。试求动齿轮以圆心A 为基点的平面运动方程。 解:?c o s )(r R x A += (1) ?sin )(r R y A += (2) α为常数,当t = 0时,0ω=0?= 0 22 1t α?= (3) 起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过 θ??+=A 因动齿轮纯滚,故有? ? =CP CP 0,即 θ?r R = ?θr R = , ??r r R A += (4) 将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为: ??? ? ?? ??? +=+=+=22 2212sin )(2cos )(t r r R t r R y t r R x A A A α?αα 6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。试以杆与铅垂线的夹角θ 表示杆的角速度。 解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。则角速度杆AB 为 h v AC v AP v AB θθω2 000cos cos === 6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。试问当拖车以速度v 前进时,轮A 与垫滚B 的角速度A ω与B ω有什么关系?设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。 解:R v R v A A == ω R v R v B B 22==ω B A ωω2= 6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。设杆BC 在水平位置时,滚子的角速度ω=12 rad/s ,θ=30?,?=60?,BC =270mm 。试求该瞬时杆BC 的角速度和点C 的速度。 习题6-1图 习题6-2图 习题6-2解图 习题6-3解图 习题6-3图 v A = v v B = v ωA ωB
静力学知识点 静力学公理和物体的受力分析 本章总结 1.静力学是研究物体在力系作用下的平衡条件的科学。 2.静力学公理 公理1 力的平行四边形法则。 公理2 二力平衡条件。 公理3 加减平衡力系原理 公理4 作用和反作用定律。 公理5 刚化原理。 3.约束和约束力 限制非自由体某些位移的周围物体,称为约束。约束对非自由体施加的力称为约束力。约束力的方向与该约束所能阻碍的位移方向相反。 4.物体的受力分析和受力图 画物体受力图时,首先要明确研究对象(即取分离体)。物体受的力分为主动力和约束力。要注意分清内力与外力,在受力图上一般只画研究对象所受的外力;还要注意作用力和反作用力之间的相互关系。 常见问题 ! 问题一画受力图时,严格按约束性质画,不要凭主观想象与臆测。 平面力系 本章总结 1. 平面汇交力系的合力 ( 1 )几何法:根据力多边形法则,合力矢为 合力作用线通过汇交点。 ( 2 )解析法:合力的解析表达式为 ( 2. 平面汇交力系的平衡条件 ( 1 )平衡的必要和充分条件: ( 2 )平衡的几何条件:平面汇交力系的力多边形自行封闭。 ( 3 )平衡的解析条件(平衡方程): 3. 平面内的力对点 O 之矩是代数量,记为
一般以逆时针转向为正,反之为负。 或 4. 力偶和力偶矩 力偶是由等值、反向、不共线的两个平行力组成的特殊力系。力偶没有合力,也不能用一个力来平衡。 平面力偶对物体的作用效应决定于力偶矩 M 的大小和转向,即 式中正负号表示力偶的转向,一般以逆时针转向为正,反之为负。 》 力偶对平面内任一点的矩等于力偶矩,力偶矩与矩心的位置无关。 5. 同平面内力偶的等效定理:在同平面内的两个力偶,如果力偶相等,则彼此等效。力偶矩是平面力偶作用的唯一度量。 6. 平面力偶系的合成与平衡 合力偶矩等于各分力偶矩的代数和,即 平面力偶系的平衡条件为 7、平面任意力系 平面任意力系是力的作用线可杂乱无章分布但在同一平面内的力系。当物体(含物体系)有一几何对称平面,且力的分别关于此平面对称时,可简化为平面力系计算。还有其他情况也可按平面任意力系计算。 ! 本章用力的平移定理对平面任意力系进行简化,得到主矢主矩的概念,并进一步对力系简化结果进行讨论;然后得出平面任意力系的平衡条件,得出平衡方程的三种形式,并用平衡方程求解一些平衡问题;介绍静定超静定问题的概念,对物体系的平衡问题进行比较多的训练;最后介绍平面简单桁架的概念和内力计算。 常见问题 问题一不要因为这一章的内容简单,就认为理论力学容易学,而造成轻视理论力学的印象,这将给后面的学习带来影响。 问题二本章一开始要掌握好单个物体的平衡问题与解题技巧,这样才能熟练掌握物体系平衡问题的解法与解题技巧。 问题三在平时做题时,要注意解题技巧的训练,能用一个方程求解的就不用两个方程,但考试时则不一定如此。 第三章空间力系 本章总结 1. 力在空间直角坐标轴上的投影 … ( 1 )直接投影法 ( 2 )间接投影法(图形见课本) 2. 力矩的计算
第11章 动量矩定理 一、是非题(正确的在括号内打“√”、错误的打“×”) 1. 质点系对某固定点(或固定轴)的动量矩,等于质点系的动量对该点(或轴)的矩。 (×) 2. 质点系所受外力对某点(或轴)之矩恒为零,则质点系对该点(或轴)的动量矩不变。(√) 3. 质点系动量矩的变化与外力有关,与内力无关。 (√) 4. 质点系对某点动量矩守恒,则对过该点的任意轴也守恒。 (√) 5. 定轴转动刚体对转轴的动量矩,等于刚体对该轴的转动惯量与角加速度之积。 (×) 6. 在对所有平行于质心轴的转动惯量中,以对质心轴的转动惯量为最大。 (×) 7. 质点系对某点的动量矩定理e 1d ()d n O O i i t ==∑L M F 中的点“O ”是固定点或质点系的质 心。 (√) 8. 如图所示,固结在转盘上的均质杆AB ,对转轴的转动惯量为20A J J mr =+ 221 3ml mr =+,式中m 为AB 杆的质量。 (×) 9. 当选质点系速度瞬心P 为矩心时,动量矩定理一定有e 1d ()d n P P i i t ==∑L M F 的形式,而 不需附加任何条件。 (×) 10. 平面运动刚体所受外力对质心的主矩等于零,则刚体只能做平动;若所受外力的主矢等于零,刚体只能作绕质心的转动。 (×)
图 二、填空题 1. 绕定轴转动刚体对转轴的动量矩等于刚体对转轴的转动惯量与角速度的乘积。 2. 质量为m ,绕z 轴转动的回旋半径为ρ,则刚体对z 轴的转动惯量为2ρm J z =。 3. 质点系的质量与质心速度的乘积称为质点系的动量。 4. 质点系的动量对某点的矩随时间的变化规律只与系统所受的外力对该点的矩有关,而与系统的内力无关。 5. 质点系对某点动量矩守恒的条件是质点系所受的全部外力对该点之矩的矢量和等于零,质点系的动量对x 轴的动量矩守恒的条件是质点系所受的全部外力对x 轴之矩的代数和等于零。 6. 质点M 质量为m ,在Oxy 平面内运动, 如图所示。其运动方程为kt a x cos =,kt b y sin =,其中 a 、b 、k 为常数。则质点对原点O 的动量矩为abk L O =。 7. 如图所示,在铅垂平面内,均质杆OA 可绕点O 自由转动,均质圆盘可绕点A 自由转动,杆OA 由水平位置无初速释放,已知杆长为l ,质量为m ;圆盘半径为R ,质量为M 。 则当杆转动的角速度为ω时,杆OA 对点O 的动量矩O L =ω231 ml ;圆盘对点O 的动量矩 O L =ω2Ml ;圆盘对点A 的动量矩A L =0。 图 图 8. 均质T 形杆,OA = BA = AC = l ,总质量为m ,绕O 轴转动的角速度为ω,如图所示。则它对O 轴的动量矩O L =ω2ml 。 9. 半径为R ,质量为m 的均质圆盘,在其上挖去一个半径为r = R /2的圆孔,如图所示。 则圆盘对圆心O 的转动惯量O J =232 13 mR 。 图 图 10. 半径同为R 、重量同为G 的两个均质定滑轮,一个轮上通过绳索悬一重量为Q 的重
6章 刚体的平面运动分析 6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0?= 0。试求动齿轮以圆心A 为基点的平面运动方程。 解:?c o s )(r R x A += (1) ?sin )(r R y A += (2) α为常数,当t = 0时,0ω=0?= 0 22 1t α?= (3) 起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过 θ??+=A 因动齿轮纯滚,故有? ? =CP CP 0,即 θ?r R = ?θr R = , ??r r R A += (4) 将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为: ??? ? ?? ??? +=+=+=22 2212sin )(2cos )(t r r R t r R y t r R x A A A α?αα 6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。试以杆与铅垂线的夹角θ 表示杆的角速度。 解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。则角速度杆AB 为 h v AC v AP v AB θθω2 000cos cos === 6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。试问当拖车以速度v 前进时,轮A 与垫滚B 的角速度A ω与B ω有什么关系?设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。 解:R v R v A A == ω R v R v B B 22==ω B A ωω2= 6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。设杆BC 在水平位置时,滚子的角速度ω=12 rad/s ,θ=30?,?=60?,BC =270mm 。试求该瞬时杆BC 的角速度和点C 的速度。 习题6-1图 习题6-2图 习题6-2解图 习题6-3解图 习题6-3图 v A = v v B = v ωA ωB
一、是非题 1、力有两种作用效果,即力可以使物体的运动状态发生变化,也可以使物体发生变形。 (√) 2、在理论力学中只研究力的外效应。(√) 3、两端用光滑铰链连接的构件是二力构件。(×) 4、作用在一个刚体上的任意两个力成平衡的必要与充分条件是:两个力的作用线相同, 大小相等,方向相反。(√) 5、作用于刚体的力可沿其作用线移动而不改变其对刚体的运动效应。(×) 6、三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。(×) 7、平面汇交力系平衡时,力多边形各力应首尾相接,但在作图时力的顺序可以不同。 (√) 8、约束力的方向总是与约束所能阻止的被约束物体的运动方向一致的。(×) 9、在有摩擦的情况下,全约束力与法向约束力之间的(应是最大)夹角称为摩擦角。(×) 10、用解析法求平面汇交力系的平衡问题时,所建立的坐标系x,y轴一定要相互垂直。 (×) 11、一空间任意力系,若各力的作用线均平行于某一固定平面,则其独立的平衡方程最多只有3个。 (×) 12、静摩擦因数等于摩擦角的正切值。(√) 13、一个质点只要运动,就一定受有力的作用,而且运动的方向就是它受力方向。(×) 14、已知质点的质量和作用于质点的力,质点的运动规律就完全确定。(×) 15、质点系中各质点都处于静止时,质点系的动量为零。于是可知如果质点 系的动量为零,则质点系中各质点必都静止。(×) 16、作用在一个物体上有三个力,当这三个力的作用线汇交于一点时,则此力系必然平衡。 (×) 17、力对于一点的矩不因力沿其作用线移动而改变。(√) 18、在自然坐标系中,如果速度υ= 常数,则加速度α= 0应是切线方向加速度为零。(×) 19、设一质点的质量为m,其速度 与x轴的夹角为α,则其动量在x轴上的投影为mvx =mvcos a。(√) 20、用力的平行四边形法则,将一已知力分解为F1和F2两个分力,要得到唯一解答,必须具备:已知 F1和F2两力的大小;或已知F1和F2两力的方向;或已知F1或F2中任一个力的大小和方向。 ( √) 21、某力在一轴上的投影与该力沿该坐标轴的分力其大小相等,故投影就是分力。 ( ×) 22、图示结构在计算过程中,根据力线可传性原理,将力P由A点传至B点,其作用效果不变。 (×)
魏 泳 涛 1.1举例说明由r F r F ?=?21,或者由r F r F ?=?21,不能断定21F F =。 解:若1F 与2F 都与r 垂直,则021=?=?r F r F ,但显然不能断定21F F =; 若1F 与2F 都与r 平行,则021=?=?r F r F ,也不能断定21F F =;
魏 泳 涛 1.2给定力)32(3k j i F ++-=,其作用点的坐标为)6,4,3(---。已知OE 轴上的单位矢量)(3 3k j i e ++=,试求力F 在OE 轴上的投影以及对OE 轴之矩。 解:力F 在OE 轴上的投影 4321)(3 3)32(3=++-=++?++-=?=k j i k j i e F OE F 力F 对坐标原点O 之矩
魏 泳 涛 1.3长方体的长、宽和高分别为cm 8=a 、cm 4=b 、cm 3=h ,力1F 和2F 分别作用于棱角A 和B ,方向如图示,且N 101=F ,N 52=F 。试求1F 在图示各坐标轴上的投影和2F 对各坐标轴之矩。 解:力1F 在坐标轴上的投影
魏 泳 涛 1.4 轴AB 在Ayz 平面内,与铅锤的Az 轴成α角。悬臂CD 垂直地固定在AB 轴上,与Ayz 平面成θ角,如图所示。如在D 点作用铅直向下的力P F 。并设a CD =,h AC =,试求力P F 对A 点之矩及对AB 轴之矩。 解:由于力P F 平行于z 轴,所以,0P P ==y x F F ,P P F F z -=, 0)(P P P =-=y x z yF xF m F )(P F x m 和)(P F y m 只与D 的x 及y 坐标有关。 D 的x 坐标:θsin a ; D 的y 坐标:αθαcos cos sin a h +; P F 对x 轴之矩:)cos cos sin ()(P P αθαa h F m x +-=F ; P F 对y 轴之矩:θsin )(P P a F m y =F ; 所以P F 对点A 之矩为:j F i F F m )()()(P P P y x A m m += 轴AB 的方向向量:)cos (sin k j e αα+= 于是得到P F 对轴AB 之矩:αθsin sin )()(P P P a F m A AB =?=e F m F
考研院校航天领域高校排名 神舟十号载人飞船于6月11日17时38分在酒泉卫星发射中心成功发射,飞行乘组由男航天员聂海胜、张晓光和女航天员王亚平组成,聂海胜担任指令长。神十升天,燃起了很多考研学子的航天梦,根据教育部学位中心发布的《2012年学科评估结果》,在“航天宇航科学与技术”领域实力排名的高校情况如下:Top.1 北京航空航天大学 学科整体水平得分 92分 北京航空航天大学,简称“北航”,成立于1952年,由当时的清华大学、北洋大学、厦门大学、四川大学等八所院校的航空系合并组建,是新中国第一所航空航天高等学府,现隶属于工业和信息化部。 航空科学与工程学院 航空学院前身是清华大学航空系,是1952年北航成立时最早的两个系之一,当时称飞机系(设飞机设计和飞机工艺专业),1958年更名为航空工程力学系,1970年更名为五大队,1972年更名为五系,1989年定名为飞行器设计与应用力学系,2003年成立航空科学与工程学院。早期的航空学院荟萃了一批当时国内著名的航空领域的专家,如屠守锷、王德荣、陆士嘉、沈元、王俊奎、吴礼义、张桂联、徐鑫福、徐华舫、何庆芝、伍荣林、史超礼、叶逢培等教授,屠守锷院士是第一任系主任,他们为本院发展奠定了坚实基础。在北航发展史上,航空学院不断输出专业和人才,
先后参与组建七系、三系、十四系、宇航学院、飞行学院、无人机所、土木工程系、交通学院等院系。 Top.2国防科学技术大学学科整体水平得分 88分 国防科技大学是国防部和教育部双重领导下的国家重点综合性大学,列入国家“985工程”和“211工程”的重点建设。学校的前身是1953年创建于黑龙江省哈尔滨市的军事工程学院,简称“哈军工”。 航天与材料工程学院 航天与材料工程学院前身是哈尔滨军事工程学院下设的导弹工程系,创建于1959年。学院以航天和新材料技术为特色,主要从事卫星、导弹等各种飞行器总体设计技术、推进技术、控制和测试发射技术、新材料技术、应用化学技术等方面的高素质人才培养和科学研究工作。 Top.3西北工业大学 学科整体水平得分 87分 西北工业大学坐落于古都西安,是我国唯一一所以同时发展航空、航天、航海工程教育和科学研究为特色,以工理为主,管、文、经、法协调发展的研究型、多科性和开放式的科学技术大学,隶属工业和信息化部。 航空学院 岁月如梭,光阴荏苒,源于1933年的西北工业大学航空学院历经了从初期的交通大学航空门(1935年)、南京大学(原中央大学)航空工程教育(1935年)和浙江大学航空工程教育(1933年),到1952年成立于南京的华东航空学院飞机工程系,再到西迁后的西
第一章 习题4-1.求图示平面力系的合成结果,长度单位为m。 解:(1) 取O点为简化中心,求平面力系的主矢: 求平面力系对O点的主矩: (2) 合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力 偶,大小是260Nm,转向是逆时针。 习题4-3.求下列各图中平行分布力的合力和对于A点之矩。 解:(1) 平行力系对A点的矩是: 取B点为简化中心,平行力系的主矢是: 平行力系对B点的主矩是: 向B点简化的结果是一个力R B和一个力偶M B,且:
如图所示; 将R B向下平移一段距离d,使满足: 最后简化为一个力R,大小等于R B。其几何意义是:R的大小等于载荷分布的矩形面积,作用点通过矩形的形心。 (2) 取A点为简化中心,平行力系的主矢是: 平行力系对A点的主矩是: 向A点简化的结果是一个力R A和一个力偶M A,且: 如图所示; 将R A向右平移一段距离d,使满足: 最后简化为一个力R,大小等于R A。其几何意义是:R的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
习题4-4.求下列各梁和刚架的支座反力,长度单位为m。解:(1) 研究AB杆,受力分析,画受力图: 列平衡方程: 解方程组: 反力的实际方向如图示。 校核: 结果正确。 (2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:
列平衡方程: 解方程组: 反力的实际方向如图示。校核: 结果正确。(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图: 列平衡方程: 解方程组:
反力的实际方向如图示。 校核: 结果正确。 习题4-5.重物悬挂如图,已知G=1.8kN,其他重量不计;求铰链A的约束反力和杆BC所受的力。 解:(1) 研究整体,受力分析(BC是二力杆),画受力图: 列平衡方程: 解方程组: 反力的实际方向如图示。
《理论力学》教学大纲 课程编码:3597 英文名称:Theoretical Mechanics 总学时:80 实验:上机: 适合专业:土木工程 一、课程内容及要求 本课程主要内容:对质点、质点系的刚体的机械运动(包括平衡)的规律有较系统的理解,掌握其中的基本概念,基本理论和基本方法及其应用。 学习重点: 1.熟悉各种常见约束的性质,对简单的物体系统,能熟练地取分离体并画出受力图。 2.能运用平衡条件求解单个物体和简单物体系的平衡问题(包括考虑滑动摩擦的问题)。对平面问题要求熟练。 3.熟悉刚体平动、定轴转动和平面运动的特征,并能熟练地计算刚体的角速度和角加速度、刚体内各点的速度和加速度,包括简单机构的运动分析。 4.掌握运动合成和分解的基本概念和方法。熟练掌握点的速度合成定理和牵连运动为平动时的加速度合成定理的应用。 5.能正确地列出质点运动和刚体运动(包括刚体定轴转动和平面运动)的动力学微分方程并能求解有关的问题。 6.熟练掌握动力学普遍定理及相应的守恒定理,能熟练选择和综合应用这些定理去求解工程中简单的理论力学问题。 7.能掌握虚位移原理的有关概念及其应用。 学习难点: 1.常见约束的性质,对简单的物体系统,能熟练地取分离体并画出受力图。 2.能运用平衡条件求解单个物体和简单物体系的平衡问题(包括考虑滑动摩擦的问题)。对平面问题要求熟练。 3.掌握描述点的运动弧坐标法,能求点的运动方程,并能熟练地计算点的速度、加速度及其有关问题。 4.掌握运动合成和分解的基本概念和方法。熟练掌握点的速度合成定理和牵连运动为平动时的加速度合成定理的应用。掌握牵连运动为定轴转动时加速度合成定理及其应用。 5.能理解并熟练计算动力学中各基本物理量(动量、动量矩、动能、冲量、功、势能等) 6.能正确地列出质点运动和刚体运动(包括刚体定轴转动和平面运动)的动力学微分方程并能求解有关的问题。 7.熟练掌握动力学普遍定理及相应的守恒定理,能熟练选择和综合应用这些定理去求解工程中简单的理论力学问题。 8.会计算惯性力。掌握刚体平动以及对称刚体作定轴转动和平面运动时惯性力系的简化结果,能熟练的应用达朗伯原理求解简单的动力学问题。 绪论:理论力学研究对象及其在工程技术中的作用。理论力学的研究方法。 第一篇静力学 第一章静力学的基本概念、公理和物体的受力分析 §1.1 静力学公理 §1.2 约束和约束反力 §1.3物体的受力分析和受力图 要求:通过本章的教学,使学生了解掌握各种常见约束的性质,能从简单的实际问题抽象出理论力学模型。掌握根据问题的具体条件和要求,从简单的物体系中恰当地选取分离体,并熟练地画出受力图。 重点:各种约束的特征及约束反力的画法
清华大学2004至2005年理论力学本科期末考试试卷 考试课程:理论力学 2004 年 1 月 班级姓名学号成绩 一、填空题( 20 分,每小题 5 分) 1. 平面内运动的组合摆,由杆OA、弹簧及小球m组成(如图 1 示)。此系统的自由度数是 3 。 2. 质量为m1的杆OA 以匀角速度ω绕O 轴转动,其A 端用铰链与质量为 m、半径为r的均质小圆盘相连,小圆盘在半径为的固定2 圆盘的圆周表面作纯滚动,如图 2 所示。系统对O 轴的动量矩的大小为 系统的动能为。
3. 图 3 所示半径为R 的圆环在力偶矩为M 的力偶作用下以角速度ω匀速转动,质量为m的小环可在圆环上自由滑动。系统为理想、完整、非定常、双面约束系统,自由度数为 1 。 4.均质细杆AB 长L,质量为m,与铅锤轴固结成角α = 30°,并以匀角速度ω转动,如图 4 所示。惯性力系的合力的大小等于 。
二、判断题(每题 2 分,共 20 分):请在每道题前面的括号内画×或√ ( √ )1. 在定常约束下质系的一组无穷小真实位移就是虚位移。( √ )2. 任意力系都可以用三个力等效代替。 ( × )3. 首尾相接构成封闭三角形的三个力构成平衡力系。 ( √ )4. 速度投影定理既适用于作平面运动的刚体,也适用于作一般运动的刚体。 ( √ )5. 如果一个两自由度系统的第二类拉格朗日方程存在两个独立的第一积分, 则其中至少有一个是广义动量积分。 ( × )6. 如果刚体的角速度不为零,在刚体或其延拓部分上一定存在速度等于零的点。 ( × )7. 作定轴转动的刚体的动量矩向量一定沿着转动轴方向。( √ )8. 刚体只受力偶作用时,其质心的运动不变。 ( × )9. 如果系统存在广义能量积分,不一定机械能守恒;而如果
(b) 第4章 运动分析基础 4-1 小环A 套在光滑的钢丝圈上运动,钢丝圈半径为R (如图所示)。已知小环的初速度为v 0,并且在运动过程中小环的速度和加速度成定角θ,且 0 < θ <2 π,试确定小环 A 的运动规律。 解:R v a a 2n sin ==θ,θsin 2 R v a = θθtan cos d d 2 t R v a t v a ===,??=t v v t R v v 02d tan 1d 0θ t v R R v t s v 00tan tan d d -==θθ ??-=t s t t v R R v s 0000d tan tan d θθ t v R R R s 0tan tan ln tan -=θθθ 4-2 已知运动方程如下,试画出轨迹曲线、不同瞬时点的 1.?? ???-=-=225.1324t t y t t x , 2.???==t y t x 2cos 2sin 3 解:1.由已知得 3x = 4y (1) ???-=-=t y t x 3344 t v 55-= ? ??-=-=34y x 5-=a 为匀减速直线运动,轨迹如图(a ),其v 、a 图像从略。 2.由已知,得 2 arccos 213arcsin y x = 化简得轨迹方程:2 9 4 2x y -= (2) 轨迹如图(b ),其v 、a 图像从略。 4-3 点作圆周运动,孤坐标的原点在O 点,顺钟向为孤坐标的正方向,运动方程为 22 1Rt s π= ,式中s 以厘米计,t 以秒计。轨迹图形和直角坐标的关系如右图所示。当点第一 次到达y 坐标值最大的位置时,求点的加速度在x 和y 轴上的投影。 解:Rt s v π== ,R v a π== t ,222 n Rt R v a π== y 坐标值最大的位置时:R Rt s 2 2 1 2π π= = ,12 =∴t R a a x π==t ,R a y 2 π-= 4-4 滑块A ,用绳索牵引沿水平导轨滑动,绳的另一端绕在半径为r 的鼓轮上,鼓轮以匀角速度ω转动,如图所示。试求滑块的速度随距离x 的变化规律。 A 习题4-1图 习题4-2图 习题4-3图
解:如图(a ),应用虚位移原理: F 1 ?術 F 2 ? 8r 2 = 0 书鹵 / 、 8r 1 8r 2 tan P 如图(b ): 8 廿y ; 8 厂乔 8r i 能的任意角度B 下处于平衡时,求 M 1和M 2之间的关系 第12章 虚位移原理及其应用 12-1图示结构由8根无重杆铰接成三个相同的菱形。 试求平衡时, 解:应用解析法,如图(a ),设0D = y A = 2l sin v ; y^ 61 sin v S y A =21 cos :心; 溉=61 COST 心 应用虚位移原理: F 2 S y B - R ? S y A =0 6F 2 —2R =0 ; F i =3F 2 习题12-1图 F 2之值。已知:AC = BC 12-2图示的平面机构中, D 点作用一水平力F t ,求保持机构平衡时主动力 =EC = DE = FC = DF = l 。 解:应用解析法,如图所示: y A =lcos ) ; x D =3lsin v S y A - -l sin^ 心;S x D =3I COS ^ & 应用虚 位移原理: —F 2 ? S y A - F I 8x^0 F 2sin J - 3F t cos ^ - 0 ; F 2 = 3F t cot^ 12-3图示楔形机构处于平衡状态,尖劈角为 小关系 习题12-3 B 和3不计楔块自重与摩擦。求竖向力 F 1与F 2的大 F i F 2| (a ) (b) F i 8i - F 2 12-4图示摇杆机构位于水平面上,已知 OO i = OA 。机构上受到力偶矩 M 1和M 2的作用。机构在可
[习题6-2] 半圆形凸轮以匀速s mm v /10=沿水平方向向左运动,活塞杆AB 长l 沿铅直方向运动。当运动开始时,活塞杆A 端在凸轮的最高点上。如凸轮的半径mm R 80=,求活塞B 的运动方程和速度方程. 解:活塞杆AB 作竖向平动。以凸轮圆心为坐标原点,铅垂向上方向为x 轴的正向,则由图中的几何关系可知,任一时刻,B 点的坐标,即活塞B 的运动方程为: )(64)()(cos 2222 2cm t l vt R l R vt R R l R l x B -+=-+=-?+=+=? 活塞B 的速度方程为: )/(646422122s cm t t t t dt dx v B B --=--== [习题6-4] 点M 以匀速率u 在直管OA 内运动,直管OA 又按t ω?=规律绕O 转动。当0=t 时,M 在O 点,求其在任一瞬时的速度及加速度的大小。 解: ut r =,t ω?=。 设任一瞬时,M 点的坐标为),(y x M ,则点M 的运动方程为: t ut r x ω?cos cos ==, t ut r y ω?sin sin ==
速度方程为: t t u t u t ut t u t ut dt d dt dx v x ωωωωωωωsin cos )sin (cos )cos (-=?-+=== t t t u t t u t u v x ωωωωωωcos sin 2sin )(cos 222222 ?-+= t t u t u t ut t u t ut dt d dt dy v y ωωωωωωωcos sin cos sin )sin (+=??+=== t t t u t t u t u v y ωωωωωωc o s s i n 2c o s )(s i n 2222 22?++= 22 2 2)(t u u v v y x ω+=+ 任一瞬时,速度的大小为: 2222 2)(1)(t u t u u v v v y x ωω+=+=+= 加速度方程为: ) sin cos (t t u t u dt d dt dv a x x ωωω-== ]c o s s i n [)s i n (ωωωωωωω??+?-?-?=t t u t u t u t t u t u ωωωωc o s s i n 22--= t t t u t t u t u a x ωωωωωωωc o s s i n 4c o s )(s i n 4322222 222?++= )cos sin (t t u t u dt d dt dv a y y ωωω+== ωωωωωωω?-?+?+??=)s i n (c o s [c o s t t u t u t u t t u t u ωωωωsin cos 22?-= t t t u t t u t u a y ωωωωωωωcos sin 4sin )(cos 4322222222 ?-+= 22 2222)(4t u u a a y x ωω+=+ 任一瞬时,速度的大小为: 222222 2)(4)(4t u t u u a a a y x ωωωω+=+=+=
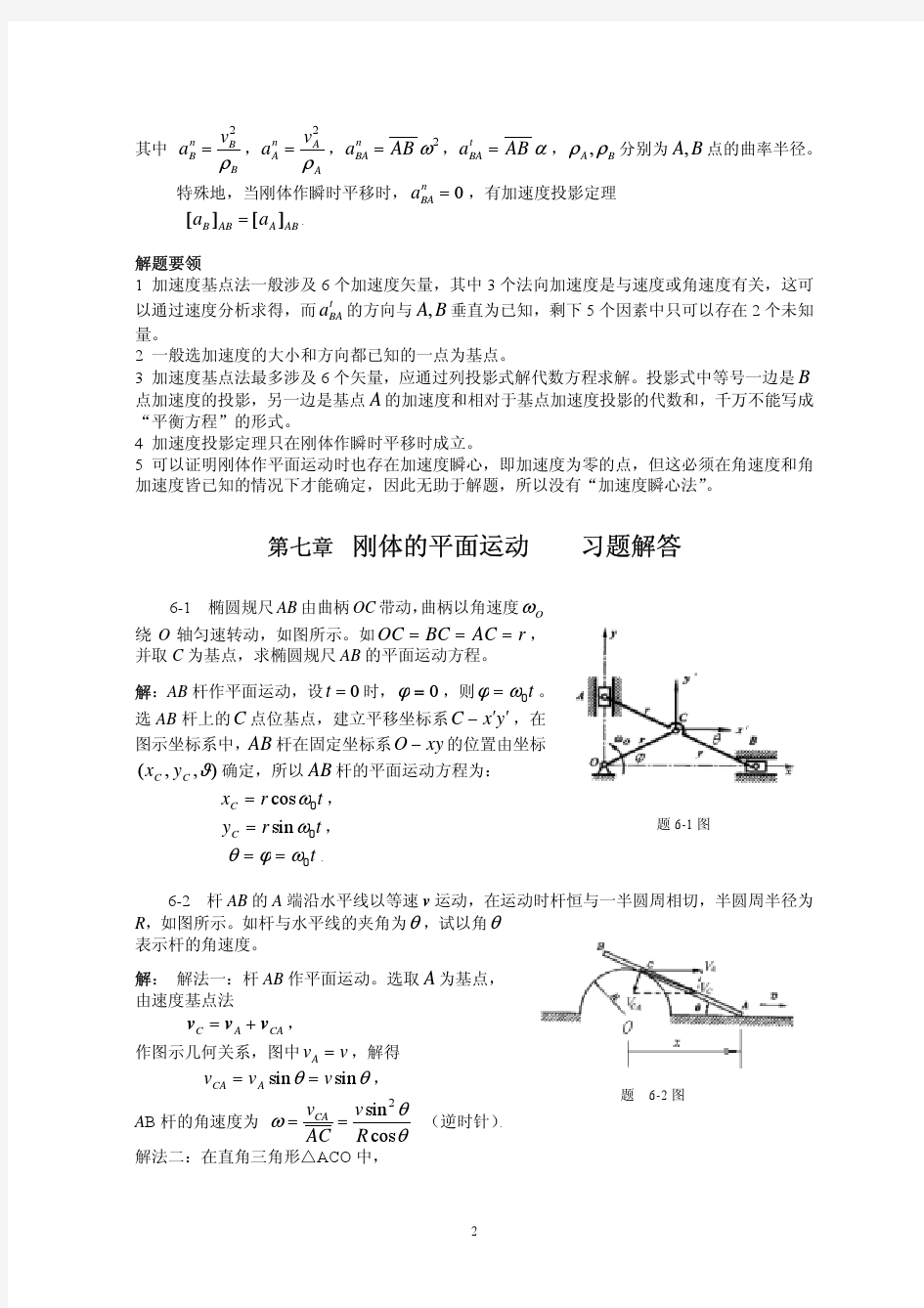
第12章 虚位移原理及其应用 12-1 图示结构由8根无重杆铰接成三个相同的菱形。试求平衡时,主动力F 1与F 2的大小关系。 解:应用解析法,如图(a ),设OD = l θsin 2l y A =;θsin 6l y B = θθδcos 2δl y A =;θθδcos 6δl y B = 应用虚位移原理:0δδ12=?-?A B y F y F 02612=-F F ;213F F = 12-2图示的平面机构中,D 点作用一水平力F 1,求保持机构平衡时主动力F 2之值。已知:AC = BC = EC = DE = FC = DF = l 。 解:应用解析法,如图所示: θcos l y A =;θsin 3l x D = θθδsin δl y A -=;θθδcos 3δ l x D = 应用虚位移原理:0δδ12=?-?-D A x F y F 0cos 3sin 12=-θθF F ;θcot 312F F = 12-3 图示楔形机构处于平衡状态,尖劈角为θ和β,不计楔块自重与摩擦。求竖向力F 1与F 2的大小关系。 解:如图(a ),应用虚位移原理:0δδ2211=?+?r F r F 如图(b ): β θtan δδtan δ2 a 1r r r ==;12 δ tan tan δr r θ β = 0δtan tan δ1211=? -?r θβF r F ;θ β tan tan 21?=F F 12-4 图示摇杆机构位于水平面上,已知OO 1 = OA 。机构上受到力偶矩M 1和M 2的作用。机构在可能的任意角度θ下处于平衡时,求M 1和M 2之间的关系。 习题12-1图 (a ) 习题12-2解图 习题12-3 (a ) r a (b )
清华大学理论力学试题专用纸 考试类型:期中考试 考试时间:2006年11月12日 班级:__________ 姓名:__________ 学号:_________ 成绩:________ 一.判断下列说法是否正确,并简要说明理由(共5题,15分) 1. 速度投影定理给出的刚体上两点速度间的关系只适用于作平面运动的刚体。 2. 圆轮沿曲线轨道作纯滚动,只要轮心作匀速运动,则轮缘上任意一点的加速度的方向均指向轮心。 3. 在复合运动问题中,相对加速度是相对速度对时间的绝对导数。 4. 虚位移是假想的、极微小的位移,它与时间、主动力以及运动的初条件无关。 5. 气象卫星在北半球上空拍摄到的旋风的旋转方向为顺时针方向。 二.填空题(共3题,25分) 1. (5分) 图1所示滑道连杆机构由连杆BC 、滑块A 和曲柄OA 组成。已知BO = OA = 0.1 m ,滑道连杆BC 绕轴B 按10rad t ?=的规律转动。滑块A 的速度为 ,加速度为 。 2. (5分) 点P 沿空间曲线运动,某瞬时其速度43(m/s)=+v i j ,加 速度的大小为210m/s ,两者之间的夹角为030。该瞬时点的轨迹在密切面内的曲率半径为 ,P 点的切线加速度为 。 3. (15分) 图2所示曲柄压榨机构,已知OA = r ,BD = DC = ED = l ,∠OAB = 90°,α = 30°。 记OA 杆的转动虚位移为δ?,则A r δ= ,B r δ= ,C r δ= , D r δ= ,并请在图中标出它们的方向。 图1
三、计算题(25分) 在图3所示机构中,连杆AB 以 2.5rad/s ω=的匀角速度转动,杆BD 可沿与杆EF 固连的套筒滑动。求在图示位置时杆EF 的角速度和角加速度。 四、计算题(20分)图4所示起重机左侧履带较右侧履 带快,使机身在圆弧形轨道上前进。如已知起重机机臂的根部A 点在半径为15 m 的圆弧上 以速度v = 2 m/s 运动,机臂仰角arcsin 0.6θ=,角速度4rad/s θ=? ,角加速度20.5rad/s θ= ,机臂长AB = 30 m 。试求: 1. 机臂的绝对角速度和角加速度。 2. 机臂端点B 的速度和加速度。 五、计算题(15分) 图5中OA 杆以等角速度0ω绕O 轴转动,半径为r 的滚轮在OA 杆上作纯滚动, 已知1O B =,图示瞬时O 、B 在同一水平线上,1O B 在铅垂位置,30AOB ∠=°,求在此瞬时1O B 杆的角速度与角加速度以及滚轮的角速度与角加速度 提示:依次采用点的复合运动理论和刚体复合运动理论。 δ? 图2 B n 图5 图4
静力学习题及解答—静力学基础
第 1 周习题为 1.2~1.9; 1.10~1.12 为选作。 1.1 举例说明由 F1 ? r = F2 ? r ,或者由 F1 × r = F2 × r ,不能断定 F1 = F2 。 解:若 F1 与 F2 都与 r 垂直,则 F1 ? r = F2 ? r = 0 ,但显然不能断定 F1 = F2 ; 若 F1 与 F2 都与 r 平行,则 F1 × r = F2 × r = 0 ,也不能断定 F1 = F2 ;
四川大学 建筑与环境学院 力学科学与工程系 魏泳涛
静力学习题及解答—静力学基础
1.2 给定力 F = 3 (? i + 2 j + 3k ) ,其作用点的坐标为 (?3,?4,?6) 。已知 OE 轴上的 单位矢量 e =
3 (i + j + k ) ,试求力 F 在 OE 轴上的投影以及对 OE 轴之矩。 3 解:力 F 在 OE 轴上的投影
FOE = F ? e = 3 (?i + 2 j + 3k ) ?
3 (i + j + k ) = ?1 + 2 + 3 = 4 3
力 F 对坐标原点 O 之矩 i j k mO ( F ) = ? 3 ? 4 ? 6 = 3 (15 j ? 10k ) ? 3 2 3 3 3 根据力系关系定理,力 F 对 OE 轴之矩
mOE ( F ) = mO ( F ) ? e = 3 (15 j ? 10k ) ? 3 (i + j + k ) = 15 ? 10 = 5 3
四川大学 建筑与环境学院 力学科学与工程系 魏泳涛