38kHz 红外发射与接收 红外线遥控器在家用电器和工业控制系统中已得到广泛应用,了解他们的工作原理和性能、进一步自制红外遥控系统,也并非难事。 1.红外线的特点 人的眼睛能看到的可见光,若按波长排列,依次(从长到短)为红、橙、黄、绿、青、蓝、紫,如图1所示。 由图可见,红光的波长范围为0.62μm~0.76μm,比红光波长还长的光叫红外线。红外线遥控器就是利用波长0.76μm~1.5μm之间的近红外线来传送控制信号的。 红外线的特点是不干扰其他电器设备工作,也不会影响周边环境。电路调试简单,若对发射信号进行编码,可实现多路红外遥控功能。 2.红外线发射和接收 人们见到的红外遥控系统分为发射和接收两部分。发射部分的发射元件为红外发光二极管,它发出的是红外线而不是可见光,如图2所示。 常用的红外发光二极管发出的红外线波长为940nm左右,外形与普通φ5 mm发光二极管相同,只是颜色不同。一般有透明、黑色和深蓝色等三种。判断红外发光二极管的好坏与判断普通二极管一样的方法。单只红外发光二极管的发射功率约100mW。红外发光二极管的发光效率需用专用仪器测定,而业余条件下,只能凭经验用拉距法进行粗略判定。 接收电路的红外接收管是一种光敏二极管,使用时要给红外接收二极管加反向偏压,它才能正常工作而获得高的灵敏度。红外接收二极管一般有圆形和方形两种。由于红外发光二极管的发射功率较小,红外接收二极管收到的信号较弱,所以接收端就要增加高增益放大电路。然而现在不论是业余制作或正式的产品,大都采用成品的一体化接收头,如图3所示。红外线一体化接收头是集红外接收、
放大、滤波和比较器输出等的模块,性能稳定、可靠。所以,有了一体化接收头,人们不再制作接收放大电路,这样红外接收电路不仅简单而且可靠性大大提高。 图3是常用两种红外接收头的外形,均有三只引脚,即电源正VDD、电源负(GND)和数据输出(Out)。接收头的引脚排列因型号不同而不尽相同,图3列出了因接收头的外形不同而引脚的区别。 红外接收头的主要参数如下: 工作电压:4.8~5.3V 工作电流:1.7~2.7mA 接收频率:38kHz 峰值波长:980nm 静态输出:高电平 输出低电平:≤0.4V 输出高电平:接近工作电压 3.红外线遥控发射电路 红外线遥控发射电路框图如图4所示。 框图4是目前所有红外遥控器发射电路的功能组成,其中的编码器即调制信号,按遥控器用途的编码方式可以很简单、也可以很复杂。例如用于电视机、VCD、DVD和组合音响的遥控发射的编码器,因其控制功能多达50种以上,此时的编码器均采用专用的红外线编码协议进行严格的编程,然而对控制功能少的红外遥控器,其编码器是简单而灵活。前者编码器是由生产厂家的专业人员按红外遥控协议进行编码,而后者适用于一般电子技术人员和电子爱好者的编码。图4中的38kHz振荡器即载波信号比较简单,但专业用的和业余用的也有区别,专业用的振荡器采用了晶振,而后者一般是RC振荡器。例如彩电红外遥控器上的发射端用了455kHz的晶振,是经过整数分频的,分频系数为12,即455kHz÷12= 37.9kHz。当然也有一些工业用的遥控系统,采用36kHz、40kHz或56kHz等的载波信号。 因红外遥控器的控制距离约10米远,要达到这个指标,其发射的载波频率(38kHz)要求十分稳定,而非专业用的RC(38kHz)载波频率稳定性差,往往偏离38kHz甚至很远,这就大大缩短了遥控器的控制距离。因晶振频率十分稳定,所以专业厂家的遥控器全部采用晶振的38kHz作遥控器的载波发送信号。 图4中编码器的编码信号对38kHz的载波信号进行调制,再经红外发射管D向空间发送信号供遥控接收端一体化接收头接收、解调输出、再作处理。
光电传感器——基于红外反射式的测速机
引言 在工程实践中,经常会遇到各种需要测量转速的场合。转速是电动机极为重要的一个状态参数,在很多运动系统的测控中,都需要对电机的转速进行测量,不论是直流调速系统还是交流调速系统,只有转速的高精度检测才能得到高精度的控制系统。迄今为止,测速可分为两类:模拟电路测速和数字电路测速。随着微电子技术的发展,计算机技术的广泛应用,出现了以计算机为核心的数字测速装置。这样的速度测量装置测量范围宽、工作方式灵活多变、适应面广,具有普通数字测速装置不可比拟的快速性、精确性和优越性。 一:设计思路 用一个红外发光二极管和一个接受红外光的二极管组成一套光电管。当检测到物表面为黑色时,反射光很弱,接收端检测到的光线可以忽略,使接收端呈现一种状态,例如开关管截止;当被检测物表面为白色时,反射光强烈,发射端发射的红外线被接收端全部接收,使接收端呈现另一种相反的状态,例如开关管开通。这两种相反的状态表现在电路中,就是高低电平组成的脉冲信号。由此,我想到用一个比较器来比较两种接受到的信号,从而输出“0”“1”两种高低电平,并把两种信号传给单片机进行统计,然后利用设定算法进行计算,最后通过数码显示管显示计算结果。 二:所需模块 本测速系统共有两个模块构成,一个为光电传感器部分,用于接收光信号并转换为电信号,即高低电平信号;另一个为单片机部分,用于接收高低电平信号并通过内部计算,然后再通过数码显示管显示测出的结果。 (一)光电传感器部分 (1)LM339工作原理及管脚图: LM339类似于增益不可调的运算放大器。每个比较器有两个输入端和一个输出端。 两个输入端中的一个称为同相输入端,用“+”表示,另一个称为反相输入
《传感器原理及应用》复习题 1.静态特性指标其中的线性度的定义是指 2.传感器的差动测量方法的优点是减小了非线性误差、提高了测量灵敏度。 3.对于等臂半桥电路为了减小或消除非线性误差的方法可以采用提高桥臂 比,采用差动电桥的方法。 4.高频反射式电涡流传感器实际是由线圈和被测体或导体两个部分组成的系统,两者之间通过电磁感应相互作用,因此,在能够构成电涡 流传感器的应用场合中必须存在金属材料。 5.霍尔元件需要进行温度补偿的原因是因为其霍尔系数和材料电阻 受温度影响大。使用霍尔传感器测量位移时,需要构造一个磁场。 6.热电阻最常用的材料是铂和铜,工业上被广泛用来测量中低温 区的温度,在测量温度要求不高且温度较低的场合,铜热电阻得 到了广泛应用。 7.现有霍尔式、电涡流式和光电式三种传感器,设计传送带上塑料零件的计数 系统时,应选其中的光电传感器。需要测量某设备的外壳温度,已知其 范围是300~400℃,要求实现高精度测量,应该在铂铑- 铂热电偶、铂电阻和热 敏电阻中选择铂电阻。 8.一个二进制光学码盘式传感器,为了达到1″左右的分辨力,需要采用 或位码盘。一个刻划直径为400 mm的 20 位码盘,其外圈分别间隔 为稍大于μm。 9.非功能型光纤传感器中的光纤仅仅起传输光信息的作用,功能型光纤传感器 是把光纤作为敏感元件。光纤的 NA 值大表明集光能力强。 11.光照使半导体电阻率变化的现象称为内光电效应,基于此效应的器件除光敏 电阻外还有处于反向偏置工作状态的光敏二极管。光敏器件的灵敏度可 用光照特性表征,它反映光电器件的输入光量与输出光电流(电压 )之间 的关系。选择光电传感器的光源与光敏器件时主要依据器件的光谱特性。 12. 传感器一般由敏感元件 _ 、转换元件 ___ 、测量电路及辅助电 源四个部分组成。 13.传感器的灵敏度是指稳态标准条件下,输出变化量与输入变化 量的比值。对线性传感器来说,其灵敏度是一常数。
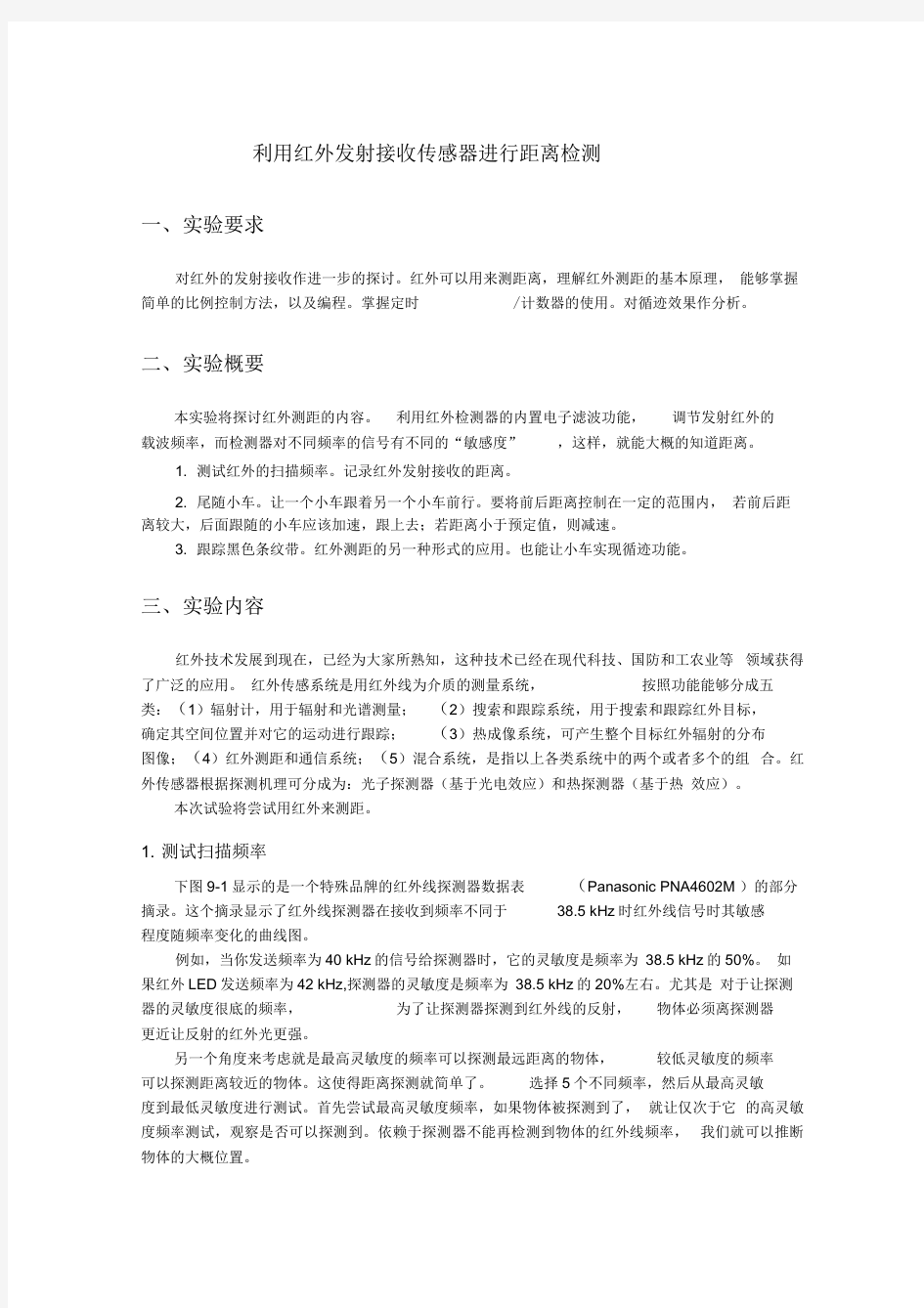
红外测距传感器:Sharp红外传感器的原理以及使用技巧 2009-02-23 21:20 在过去几年中,Sharp开发了很多种红外距离传感器。这些传感器不但体积小,功耗也很低。这篇文章就简单的介绍一下这些传感器的不同点,使用方法,接口方法以及一些使用上的小技巧。 工作原理: Sharp的红外传感器都是基于一个原理,三角测量原理。红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图1所示。反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。
图1:三角测量原理 可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。当物体距离D很大时,L值就会很小。这时CCD检测器能否分辨得出这个很小的L值成为关键,也就是说CCD 的分辨率决定能不能获得足够精确的L值。要检测越是远的物体,CCD的分辨率要求就越高。 非线性输出: Sharp GS2XX系列的传感器的输出是非线性的。没个型号的输出曲线都不同。所以,在实际使用前,最好能对所使用的传感器进行一下校正。对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。下图是典型的Sharp GP2D12的输出曲线图。 图2:Sharp GP2D12输出曲线 从上图中,可以看到,当被探测物体的距离小于10cm的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的靠近障碍物,突然发现障碍
38khz红外发射与接收 38khz红外发射与接收 红外线遥控器在家用人的眼睛能看到的可见光,若按波长排列,依次(从长到短)为红,橙,黄,绿,青,蓝,紫,如图1所示. 由图可见,红光的波长范围为0.62μm~0.76μm,比红光波长还长的光叫红外线.红外线遥控器就是利用波长0.76μm~1.5μm之间的近红外线来传送控制信号的. 红外线的特点是不干扰其他电器设备工作,也不会影响周边环境. 人们见到的红外遥控系统分为发射和接收两部分.发射部分的发射元件为红外发光二极管,它发出的是红外线而不是可见光,如图2所示. 常用的红外发光二极管发出的红外线波长为940nm左右,外形与普通φ5mm发光二极管相同,只是颜色不同.一般有透明,黑色和深蓝色等三种.判断红外发光二极管的好坏与判断普通二极管一样的方法.单只红外发光二极管的发射功率约100mW.红外发光二极管的发光效率需用专用仪器测定,而业余条件下,只能凭经验用拉距法进行粗略判定. 接收电路的红外接收管是一种光敏二极管,使用时要给红外接收二极管加反向偏压,它才能正常工作而获得高的灵敏度.红外接收二极管一般有圆形和方形两种.由于红外发光二极管的发射功率较小,红外接收二极管收到的信号较弱,所以接收端就要增加高增益放大电路.然而现在不论是业余制作或正式的产品,大都采用成品的一体化接收头,如图3所示.红外线一体化接收头是集红外接收,放大,滤波和比较器输出等的模块,性能稳定,可靠.所以,有了一体化接收头,人们不再制作接收放大电路,这样红外接收电路不仅简单而且可靠性大大提高. 图3是常用两种红外接收头的外形,均有三只引脚,即红外接收头的主要参数如下: 工作电压:4.8~5.3V 工作电流:1.7~2.7mA 接收频率:38kHz 峰值波长:980nm 静态输出:高电平 输出低电平:≤0.4V 输出高电平:接近工作电压 3.红外线遥控发射电路 红外线遥控发射电路框图如图4所示. 框图4是目前所有红外遥控器发射电路的功能组成,其中的编码器即调制信号,按遥控器用途的编码方式可以很简单,也可以很复杂.例如用于电视机,VCD,DVD 和组合音响的遥控发射的编码器,因其控制功能多达50种以上,此时的编码器均采用专用的红外线编码协议进行严格的编程,然而对控制功能少的红外遥控器,其编码器是简单而灵活.前者编码器是由生产厂家的专业人员按红外遥控协议进行编码,而后者适用于一般图4中编码器的编码信号对38kHz的载波信号进行调制,再经红外发射管D向空间发送信号供遥控接收端一体化接收头接收,解调输出,再作处理.
光电传感器工作原理(红外线光电传感器原理) 光电传感器是通过把光强度的变化转换成电信号的变化来实现控制的。 光电传感器在一般情况下,有三部分构成,它们分为:发送器、接收器和检测电路。 发送器对准目标发射光束,发射的光束一般来源于半导体光源,发光二极管(LED)、激光二极管及红外发射二极管。光束不间断地发射,或者改变脉冲宽度。接收器有光电二极管、光电三极管、光电池组成。在接收器的前面,装有光学元件如透镜和光圈等。在其后面是检测电路,它能滤出有效信号和应用该信号。 此外,光电开关的结构元件中还有发射板和光导纤维。 三角反射板是结构牢固的发射装置。它由很小的三角锥体反射材料组成,能够使光束准确地从反射板中返回,具有实用意义。它可以在与光轴0到25的范围改变发射角,使光束几乎是从一根发射线,经过反射后,还是从这根反射线返回。 分类和工作方式 ⑴槽型光电传感器 把一个光发射器和一个接收器面对面地装在一个槽的两侧的是槽形光电。发光器能发出红外光或可见光,在无阻情况下光接收器能收到光。但当被检测物体从槽中通过时,光被遮挡,光电开关便动作。输出一个开关控制信号,切断或接通负载电流,从而完成一次控制动作。槽形开关的检测距离因为受整体结构的限制一般只有几厘米。 ⑵对射型光电传感器 若把发光器和收光器分离开,就可使检测距离加大。由一个发光器和一个收光器组成的光电开关就称为对射分离式光电开关,简称对射式光电开关。它的检测距离可达几米乃至几十米。使用时把发光器和收光器分别装在检测物通过路径的两侧,检测物通过时阻挡光路,收光器就动作输出一个开关控制信号。 ⑶反光板型光电开关 把发光器和收光器装入同一个装置内,在它的前方装一块反光板,利用反射原理完成光电控制作用的称为反光板反射式(或反射镜反射式)光电开关。正常情况下,发光器发出的光被反光板反射回来被收光器收到;一旦光路被检测物挡住,收光器收不到光时,光电开关就动作,输出一个开关控制信号。 ⑷扩散反射型光电开关 它的检测头里也装有一个发光器和一个收光器,但前方没有反光板。正常情况下发光器发出的光收光器是找不到的。当检测物通过时挡住了光,并把光部分反射回来,收光器就收到光信号,输出一个开关信号。
常用传感器的工作原理及应用
3.1.1电阻式传感器的工作原理 应变:物体在外部压力或拉力作用下发生形变的现象 弹性应变:当外力去除后,物体能够完全恢复其尺寸和形状的应变 弹性元件:具有弹性应变特性的物体 3.1.3电阻应变式传感器 电阻应变式传感器利用电阻应变片将应变转换为电阻值变化的传感器。 工作原理:当被测物理量作用于弹性元件上,弹性元件在力、力矩或压力等的作用下发生变形,产生相应的应变或位移,然后传递给与之相连的应变片,引起应变片的电阻值变化,通过测量电路变成电量输出。输出的电量大小反映被测量的大小。 结构:应变式传感器由弹性元件上粘贴电阻应变片构成。 应用:广泛用于力、力矩、压力、加速度、重量等参数的测量。 1.电阻应变效应 ○
电阻应变片的工作原理是基于应变效应,即导体或半导体材料在外界力的作用下产生机械变形时,其电阻值相应发生变化,这种现象称为“应变效应”。 2.电阻应变片的结构 基片 b l 电阻丝式敏感栅 金属电阻应变片的结构 4.电阻应变式传感器的应用 (1)应变式力传感器 被测物理量:荷重或力 一
二 主要用途:作为各种电子称与材料试验机的 测力元件、 发动机的推力测试、水坝坝体承载状况监测等。 力传感器的弹性元件:柱式、筒式、环式、悬臂式等 (2)应变式压力传感器 主要用来测量流动介质的动态或静态压力 应变片压力传感器大多采用膜片式或筒式 弹性元件。 (3)应变式容器内液体重量传感器 感压膜感受上面液体的压力。 (4)应变式加速度传感器 用于物体加速度的测量。 依据:a =F/m 。 3.2电容式传感器 3.2.1电容式传感器的工作原理 由绝缘介质分开的两个平行金属板组成的 平板电容器,如果不考虑边缘效应,其电容量为 当被测参数变化使得S 、d 或ε发生变化时, 电容量C 也随之变化。 d S C ε=
激光传感器的工作原理 及其应用 Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT
激光传感器由激光器、激光检测器和测量电路组成。激光传感器是新型测量仪表,它的优点是能实现无接触远距离测量,速度快,精度高,量程大,抗光、电干扰能力强等。激光传感器工作时,先由激光发射二极管对准目标发射激光脉冲。经目标反射后激光向各方向散射。部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号,并将其转化为相应的电信号。常见的是激光测距传感器,它通过记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定目标距离。激光传感器的应用 利用激光的高方向性、高单色性和高亮度等特点可实现无接触远距离测量。激光传感器常用于长度、距离、振动、速度、方位等物理量的测量,还可用于探伤和大气污染物的监测等。 激光测长 精密测量长度是精密机械制造工业和光学加工工业的关键技术之一。现代长度计量多是利用光波的干涉现象来进行的,其精度主要取决于光的单色性的好坏。激光是最理想的光源,它比以往最好的单色光源(氪-86灯)还纯10万倍。因此激光测长的量程大、精度高。 激光测距 它的原理与无线电雷达相同,将激光对准目标发射出去后,测量它的往返时间,再乘以光速即得到往返距离。由于激光具有高方向性、高单色性和高功率等优点,这些对于测远距离、判定目标方位、提高接收系统的信噪比、保证测量精度等都是很关键的,因此激光测距仪日益受到重视。在激光测距仪基础上发展起来的激光雷达不仅能测距,而且还可以测目标方位、运运速度和加速度等,已成功地用于人造卫星的测距和跟踪。 激光测振 它基于多普勒原理测量物体的振动速度。多普勒原理是指:若波源或接收波的观察者相对
红外遥控发射和接收系统设计 摘要 本设计是以红外技术为基础,可以实现无线遥控,摆脱了信息传递需要导线的限制,而且红外实现方式灵活,得到了广泛的应用。特别是随着芯片技术的发展,红外集成芯片价格的降低,更加扩展了红外的应用范围。现在在我们的日常生活中都能感受到红外的应用,以及它给我们带来的便利。本设计充分利用能够很容易买到的普通电视机遥控器,通过编码发射红外线,然后由通用红外接收芯片sw0038实现对红外的接收,但是因为考虑到题目的要求仅仅是实现对一个开关的简单开管控制,所以舍弃了依靠单片机来对遥控器发出的红外进行解码实现多种控制的方案。本方案简洁可行,充分利用现有的资源进行开发,取得比较好的效果,并且具有良好的移植性,可以通过简单的修改就应用到其他领域。 关键字:红外遥控红外解码双稳态 Abstract This design is take the infrared technology as a foundation, realizing the wireless remote control, getting rid of the the limit of wire information transmission. Beacause infrared technology is easy to be realized,it is widely used in many fields. Specially ,with the chip technology development, infrared integrated chip price reducing, even more expanded the infrared application scope . Now in our daily life ,we can feel the application of the infrared, and the convenience it has brought us.In this design,I take ordinary television remote control device to realize coding and Infrared Emission,then it is received by the general infrared receive chip sw0038 .what the topic requests is merely the realization of a simple switch control,so I give up the program on the MCU. The program is simple and feasible, making full use of the existing resources for development, and achieve fairly good results.It has a good portability,so only after a little change,it can be transplanted to other fields. Key word: infrared remote control infrared decode bistability
各种温度传感器分类及其原理.
各种温度传感器分类及其原理 温度传感器是检测温度的器件,其种类最多,应用最广,发展最快。众所周知,日常使用的材料及电子元件大部分特性都随温度而变化, 在此我们暂时介绍最常用的热电阻和热电偶两类产品。 1. 热电偶的工作原理 当有两种不同的导体和半导体 A 和 B 组成一个回路,其两端相互连接时,只要两结点处的温度不同,一端温度为 T ,称为工作端或热端,另一端温度为 TO ,称为自由端 (也称参考端 或冷端,则回路中就有电流产生,如图 2-1(a所示,即回路中存在的电动势称为热电 动势。这种由于温度不同而产生电动势的现象称为塞贝克效应。 与塞贝克有关的效应有两个:其一, 当有电流流过两个不同导体的连接处时, 此处便吸收或放出热量 (取决于电流的方向 , 称为珀尔帖效应;其二,当有电流流过存在温度梯度的导体时,导体吸收或放出热量(取决 于电流相对于温度梯度的方向 ,称为汤姆逊效应。两种不同导体或半导体的组合称为热电偶。热电偶的热电势 EAB(T, T0 是由接触电势和温差电势合成的。接触电势是指两种不同 的导体或半导体在接触处产生的电势, 此电势与两种导体或半导体的性质及在接触点的温度有关。 温差电势是指同一导体或半导体在温度不同的两端产生的电势, 此电势只与导体或半导体的性质和两端的温度有关, 而与导体的长度、截面大小、沿其长度方向的温度分布无关。 无论接触电势或温差电势都是由于集中于接触处端点的电子数不同而产生的电势, 热电偶测量的热电势是二者的合成。当回路断开时,在断开处 a , b 之间便有一电动势差△ V ,其极性和大小与回路中的热电势一致,如图 2-1(b所示。并规定在冷端,当电流由 A 流向 B 时, 称 A 为正极, B 为负极。实验表明,当△ V 很小时,△ V 与△ T 成正比关系。定义△ V 对△ T
信息工程学院实验报告 课程名称: 传感器原理及应用 实验项目名称: 实验二 红外测距传感器实验 实验时间: 班级: 姓名: 学号: 一、实 验 目 的 1. 学习 CC2530 单片机 ADC 模块的使用。 2. 学习红外测距传感器的使用。 二、实 验 原 理 1. CC2530 节点与红外测距传感器的硬件接口 红外线测距传感器模块GP2Y0A21YK0F
(1). 红外测距传感器模块(GP2Y0A21YK0F)引脚 OUT:模拟量输出接口(AD 模块) GND:外接GND VCC:数字量输出接口(0 和1) 外接5V 电源 (2). 传感器模块与CC2530 模块之间的连接 2. ADC (1). 简介 CC2530单片机的ADC支持多达14位的模拟数字转换,具有多达12位的ENOB(有效数字位)。它包括一个模拟多路转换器,具有多达8个各自可配置的通道;以及一个参考电压发生器。转换结果通过DMA写入存储器。还具有若干运行模式。ADC模块的方框图如下所示: ADC的主要特性如下:
●可选的抽取率,这也设置了分辨率(7到12位) ●8个独立的输入通道,可接受单端或差分信号 ●参考电压可选为内部单端、外部单端、外部差分或A VDD5 ●产生中断请求 ●转换结束时的DMA触发 ●温度传感器输入 ●电池测量功能 (2). 寄存器简介 本次实验中主要涉及到ADC模块的寄存器:
数据的换算: 例如:在CC2530 中配置ADC 的参考电压为A VDD5(3.3V),抽取率为512(12 位有效数据),由于在实验中采用单端转换方式,所以实际数据只有11 位。这时,ADC 采集到的数据记为x,则 ADC采集数据转换为电压(单位:V):V = x * 3.3 / 2048 3. GP2Y0A21YK0F 红外测距传感器 (1). 概述 夏普GP2Y0A21YK0F 测距传感器是基于PSD 的微距传感器,其有效的测量距离在80cm 内,有效的测量角度大于40 度,输出信号为模拟电压,在0 到8cm 左右的范围内与距离成正比非线性关系,在10-80cm 的距离范内成反比非线性关系,平均功耗为30mA,反应时间约为5ms,并且对背景光及温度的适应性较强。GP2Y0A21YK0F 传感器的默认的测距分辨率为1mm。
手机距离传感器原理及应 用 Prepared on 22 November 2020
手机距离传感器原理及应用 距离传感器又叫位移传感器,距离传感器一般都在手机听筒的两侧或者是在手机听筒凹槽中,这样便于它的工作。当用户在接听或拨打电话时,将手机靠近头部,距离传感器可以测出之间的距离到了一定程度后便通知屏幕背景灯熄灭,拿开时再度点亮背景灯,这样更方便用户操作也更为节省电量。 距离传感器原理 利用各种元件检测对象物的物理变化量,通过将该变化量换算为距离,来测量从传感器到对象物的距离位移的机器。根据使用元件不同,分为光学式位移传感器、线性接近传感器、超声波位移传感器等。手机使用的距离传感器是利用测时间来实现距离测量的一种传感器. 红外脉冲传感器通过发射特别短的光脉冲,并测量此光脉冲从发射到被物体反射回来的时间,通过测时间来计算与物体之间的距离。 距离传感器的分类 1、光学式位移传感器(智能传感器ZX-L-N系列等) 光源发出的光通过透镜进行聚光,并照射到物体上。物体发出的反射光通过受光透镜集中到一维的位置检测元件(PSD)*上。如果物体的位置(距离测定器
的距离)发生变化,PSD上成像位置将不同;如果PSD的两个输出平衡发生变化,PSD上的成像位置将不同,PSD的两个输出平衡会再次发生变化。 如果将这两个输出作为A、B,计算A/(A+B),并加上适当的拉线系数‘k’和残留误差‘C’,可求得公式为:位移量=A/(A+B)+K+C。测得的值不是照度(亮度),而是A、B两个输出的位移量,因此即使与测定对象物之间的距离发生变化,受光光量发生变化也不会受影响,可以得到与距离的差、位置的偏移成比例的线性输出。 PSD方式与CCD(CMOS)方式 PSD方式的原理特长:将对象物上的光点光束投影到受光元件上时的重心位置换算为距离 CCD(CMOS)方式的原理特长:
红外发射与接收电路实验 报告 (应电0612 学号01) 一、实验目的 制作一个简易红外发射与接收电路。要求自行装配、接线调试,并能检查和发现问题(使用万用板布线),掌握其基本原理与工作情况,并根据原理、现象和测量数据进行分析问题所在,加以解决。 二、实训材料清单及工具仪器: 万用表、示波器、电铬铁、镊子、拔线钳、螺丝刀等常用工具。 元件名称元件标号封装号 1N4001 D7 D3 1N4001 D9 D3 1N4001 D8 D3 1N4007 D3 D3 1N4007 D4 D3 1N4007 D2 D3 1N4007 D1 D3 2K R1 AXIAL-0.3 4.7K R8 AXIAL-0.3 5.1v D6 D3 10K R2 AXIAL-0.3 10K R11 AXIAL-0.3 10K R9 W3296 10uF/25V C2 EC1.5 20K R3 AXIAL-0.3 20K R5 AXIAL-0.3 27K R4 AXIAL-0.3 104 C6 CM150 104 C4 CM150 104 C3 CM150 510 R6 AXIAL-0.3 510 R10 AXIAL-0.3 510R R7 AXIAL-0.3 561 C5 CM150 4700uF/25V C1 EC4-6 9013 Q3 90XX 9013 Q2 90XX 9013 Q1 90XX
LED D5 LED NE555 IC2 DIP-8 NE555 IC1 DIP-8 RED LED LED RELAY3 ZJCA SRD 三、实验要求 使用万用板布线,红外发射的频率为38KHz,载波为250Hz。接收管经过射极放后驱动继电器。要求通电后继电器吸合,阻断红外发射信号继电器断开,信号通后继电器又吸合。通过继电器实现红外信号控制其他器件。 四、实验原理图 红外发射电路 红外接收电路 五、电路PCB板
光电检测技术与应用 论文 题目:红外测距传感器的工作原理及使用 院系:机电工程学院 班级:测控xxxx 完成日期:2017/5/6 小组:第x组 小组成员:xxxxxxxxxx 红外测距传感器的工作原理及使用 摘要: 利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。 关键字:光电检测技术、智能车、测距、红外测距传感器、单片机 一、引言 光电检测作为光学与电子学相结合而产生的一门新兴检测技术,主要包括光信息获取、光电变换、光信息测量以及测量信息的智能化处理等,具有精度高、速度快、距离远、容量大、非接触、寿命长、易于自动化和智能化等优点,在国民经济各行业中得到了迅猛的发展和广泛的应用,如光扫描、光跟踪测量,光纤测量,激光测量,红外测量,图像测量,微光、弱光测量等,是当前最主要和最具有潜力的光电信息技术。
二、光电检测技术的概念 光电检测技术是光学与电子学相结合而产生的一门新兴检测技术。它主要利用电子技术对光学信号进行检测,并进一步传递、储存、控制、计算和显示。光电检测技术从原理上讲可以检测一切能够影响光量和光特性的非电量。它可通过光学系统把待检测的非电量信息变换成为便于接受的光学信息,然后用光电探测器件将光学信息量变换成电量,并进一步经过电路放大、处理,以达到电信号输出的目的。然后采用电子学、信息论、计算机及物理学等方法分析噪声产生的原因和规律,以便于进行相应的电路改进,更好地研究被噪声淹没的微弱有用信号的特点与相关性,从而了解非电量的状态。微弱信号检测的目的是从强噪声中提取有用信号,同时提高测系统输出信号的信噪比。 光电检测技术的系统机构比较简单,分为信号的处理器,受光器,光源。在实际检测过程中,受光器在获得感知信号后,就会被反映为不同形状、颜色的信号,同时根据这些器件所处在的不同位置,就能够将他分为反射型与透过型的两种比较的模式。光电检测的媒介光应当是自然的光,例如白炽灯或者萤光灯。特别是随着这些技术的发展,光电技术也取得的非常好发展。由于投光器在发出光后,会以不一样的方式触摸这些被检测物中,直到照射到检测系统中的受光器中,同时受光器在此刺激下,会产生一定量的电流,这就是我们常说的光敏性的原件,实际生活中应用比较广泛的有三极管、二极管。 三、光电检测技术的应用 智能车方面的应用、家庭扫地机器人方面的应用:利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。 四、常用光电检测器件:红外测距传感器 原理:其输出为电压数值,通过公式L?=?(6762/(9-X))-4可计算出小车与障碍物之间的距离。
电子电路综合设计实验报告 设计实验选题七(接收部分) ---基于单片机的红外遥控收发系统的设计实现 姓名:周迪 学号:2010042105 2013年4月17日~~2013年4月24日
摘要 红外线是现代社会中已经极为常见,在遥测、遥控等领域中,往往使用微机与单片机组成多机通信系统来完成测控任务。其中,常用的方法是使用微机的RS-232C串行接口进行串行数据通信。由于受环境的影响以及RS-232C串行接口电气性能的限制,加上连接线长、接线麻烦等缺点,其通信的空间范围总是受到限制,并使人们感到不便。因此,人们想到了无线传输。常用的无线传输方式有无线短波传输和红外线传输,但这两种方式都有一定的局限性,如短波方式易受外界电磁场的干扰,线外线传输方式不能隔墙传输等等,本文将介绍采用最新的无线长波收发模块638以及三态编解码芯片MC145026/ MC145027来设计无线数据通信装置的方法。该装置具有抗干扰性能好、穿透性强、传输距离远等特点。由于串行接口传输速度慢,信号处理电路复杂,外接模块困难。因此,本装置选用并行接口通信,从而使得电路简单易做、可靠性高。 本设计是以STC89C51单片机为控制核心,本装置主要由数据编解码和发射接收两大模块组成,设计系统组成图如下: 发射部分电路模块:STC889C51单片机作为主控核心,采用三态编解码芯片MC145026作为编码芯片,CD4011逻辑器件作为反相用途,采用单段的数码管显示发射的数字,采用八位按键输入,采用MAX232作为电平转换电路作为单片机与PC机之间的程序下载用途。 接收部分电路模块:STC889C51单片机作为主控核心,与MC145026配对使用的三态编解码芯片MC145027作为解码芯片。74LS02逻辑器件作为反相用途,采用单段的数码管显示发射的数字,八位的发光二极管显示顺序,638作为红外的接收头,采用MAX232作为电平转换电路作为单片机与PC机之间的程序下载用途。 实现方法:本实验采用单片机控制,发射部分的数据经过调制编码后送入电光变换电路经过红外发射管转换为红外光脉冲发射出去,为了增加抗干扰能力将编码的信号调制在较高的频率载波上发射。在接受部分接收头将接收到的光信号装换为电信号,经过解调将发射数据解调出来,输入单片机进行控制。 实现功能:无线数据的发射与接收 特点及水平:实现无线数据传输,在三米近距离的范围内可以收到发射数据 关键词:单片机;可靠性;MC145026;MC145027;无线数据传输。
光电开关即为光电传感器,又称光电遮断器,以下是红外光电开关的基本参数详解,包括9个点: 1.输出状态:分常开和常闭。当无检测物体时,常开型的光电开关所接通的负载,由于光电开关内部的输出晶体管的截止而不工作,当检测到物体时,晶体管导通,负载得电工作。 2.检测方式:根据光电开关在检测物体时,发射器所发出的光线被折回到接收器的途径的不同,可分为漫反射式,镜反射式,对射式等。(详见工作原理说明) 3.检测距离:动作距离是指检测体按一定方式移动时,从基准位置(光电开关的感应表面)到开关动作时测得的基准位置到检测面的空间距离。额定动作距离指接近开关动作距离的标称值。 4.回差距离:动作距离与复位距离之间的绝对值。 5.响应频率:按规定的1秒的时间间隔内,允许光电开关动作循环的次数。 6.输出形式:分npn二线,npn三线,npn四线,pnp二线,pnp三线,pnp四线,AC 二线,AC五线(自带继电器),及直流NPN/PNP/常开/常闭多功能等几种常用的形式输出。 7.指向角:常见GDKG光电传感器的指向角。 8.表面反射率:对于漫反射式槽型光电开关发出的光线需要被检测物表面将足够的光线反射回漫反射开关的接受器,所以检测距离和被检测物体的表面反射率将是决定接受器接收到光线的强度大小,粗糙的表面反射回的光线必将小于光滑表面反射回的强度,而且,被检测物体的表面必须垂直于光电开关的发射光线。 9.环境特性:GDKG光电开关应用的环境亦是影响其长期工作可靠性的重要条件。当光电开关工作于最大检测距离状态时,由于光学透镜会被环境中的污物粘住,甚至会被一些强酸性物质腐蚀,以至降低使用参数特性,这些变量尽管已列入我们的产品设计考虑范围之内,但它终究是造成可靠性降低的最大因数,其较简便的解决方法是根据GDKG传感器的最大检测距离(Sn)降额使用来确定最佳工作距离。 深圳光藕供应商通用光电耦合器接收头厂家直销电视机顶盒红外线接收头 文章来源地址:https://www.doczj.com/doc/859598589.html,/
测距传感器编辑 本词条缺少信息栏、名片图,补充相关内容使词条更完整,还能快速升级,赶紧来编辑吧!超声波传感器是利用超声波的特性研制而成的传感器。超声波是一种振动频率高于声波的机械波,由换能晶片在电压的激励下发生振动产生的,它具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点。 目录 1分类 2原理 3应用 1分类 编辑 超声波测距传感器 激光测距传感器 红外线测距传感器 24GHZ雷达传感器 2原理 编辑 超声波测距传感器原理: 超声波对液体、固体的穿透本领很大,尤其是在阳光不透明的固体中,它可穿透几十米的深度。超声波碰到杂质 24GHZ雷达传感器RFbeam 或分界面会产生显著反射形成反射成回波,碰到活动物体能产生多普勒效应。因此超声波检测广泛应用在工业、国防、生物医学等方面以超声波作为检测手段,必须产生超声波和接收超声波。完成这种功能的装置就是超声波传感器,习惯上称为超声换能器,或者超声探头。激光测距传感器工作原理: 激光传感器工作时,先由激光二极管对准目标发射激光脉冲。经目标反射后激光向各方向散射。部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号。记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定目标距离。激光传感器必须极其精确地测定传输时间,因为光速太快。 红外线测距传感器工作原理: 红外测距传感器利用红外信号遇到障碍物距离的不同反射的强度也不同的原理,进行障碍物远近的检测。红外测距传感器具有一对红外信号发射与接收二极管,发射管发射特定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物时,红外信号反射回来被接收管接收,经过处理之后,通过数字传感器接口返回到机器人主机,机器人即可利用红外的返回信号来识别周围环境的变化 24GHZ雷达测距传感器原理: FSK测运动物体[1] FMCW测静止和运动物体 [1]
目录 手势挥控功能原理及调试说明 (1) 一、结构示意图 (1) 二、手势识别原理及算法 (2) 1. 手势识别原理 (2) 2. 软件流程图 (2) 3. 软件算法 (4) 1)左右挥控手势 (4) 2)按压手势 (5) 4. 手势识别函数流程图 (6) 三、手势挥控功能调试方法 (7) 1. 所需数据 (7) 2. 需确定阈值、计数值的意义及确定方法 (7) 手势挥控功能原理及调试说明 一、结构示意图 发射装置 图1俯视图
图2纵切面图 二、手势识别原理及算法 1.手势识别原理 手势识别模块开启后,采用分时复用的方法,在一个时间片内只有发射装置1发射,此时接收传感器就可以用接收到的反射值S1来表示遮挡物与发射装置1之间的距离。反射值越大,距离越小。同理在下一个时间片内只有发射装置2发射,S2表示遮挡物与发射装置2之间的距离。以10ms为周期扫描两个反射值,得到多组数据。根据这两个反射值的多组数据及其随时间的变化情况,计算挥控手势模式(左右挥动手势,按压手势)。 2.软件流程图
图3手势挥控流程图
3.软件算法 1)左右挥控手势 图4左右挥控手势数据示意图 左右挥控手势识别算法的基本原理为:手掌左右挥动时,从左右摆放的两颗发射装置上所得出的反射值均有从小到大再变小的过程,但是时间上会有间隔。若手掌由左向右挥动,则从左边发射装置上得出的反射值S1的最大值在前,而从右边发射装置上得出的反射值S2的最大值在后。如图4手势挥控数据示意图所示,分别设置发射装置1的高低阈值PS_TH_L_LED1和PS_TH_H_LED1以及发射装置2的高低阈值PS_TH_L_LED2和PS_TH_H_LED2。S1曲线与发射装置1的高低阈值四个交点的时间分别是t1,t2,t3,t4。则S1峰值的时间坐标为T1=(t1+t2+t3+t4)/4.同理可得出S2峰值的时间坐标T2.若T2>T1则挥控动作为从左到右,反之为从右到左。
实验六红外调频/调幅发射接收系统 一、实验目的 1、了解红外编、解码的原理; 2、熟悉调频/调幅接收的原理、方法和频谱; 3、熟悉调频发射机的工作原理。 二、实验内容 1、使用红外系统进行编解码,并在数码管上显示结果; 2、调试调频/调幅接收机电路,接收收音机信号 3、产生88MHz~108MHz的调频信号,实现发射机与接收机的正常通信 三、实验设备 1、20M双踪示波器一台 2、鞭状天线一根 3、带话筒耳机一套 四、实验原理 (一)红外编、解码电路原理 1、红外编码电路 红外编码调制采用编码芯片SC2262IR,典型应用电路如图6-1所示。 图6-1 SC2262IR典型应用电路
该芯片第1~8脚,第10~13脚为地址管脚,共12位。其中,第7、8、10、11、12和13脚还可作为数据管脚使用。 芯片17脚输出的编码信号由地址码、数据码和同步码组成一个完整的码字。每个码字的周期由芯片15脚和16脚所接电阻的大小确定。地址管脚状态不同,芯片17脚输出的码型也不同。即该芯片完成以地址码(数据码)为调制信号的脉宽调制,调制后的信号从芯片17脚所接的红外二极管输出。 2、红外解码原理 本实验采用一体化红外接收器。当红外接收器没有接收到信号时,输出高电平。但由于空间中的许多干扰信号,导致实验时,即使红外发射电路没有发射信号,红外接收器也有杂波输出。一般红外接收器的输出信号波形如图6-2所示。 同步码 A8A10A11 A3A9 A2A7 A0A1A4A5 A6 图6-2 红外接收器输出信号波形 图中,A0~A11分别对应于发射芯片第1~8脚和第10~13脚的状态。这里,记图52-2中A0~A7和A10所对应的波形为11,A8和A11所对应的波形为00,A9所对应的波形为10。则当发射芯片地址管脚接低电平时,解码部分对应输出11;当发射芯片地址管脚接高电平时,解码部分对应输出00;当发射芯片地址管脚悬空时,解码部分对应输出10。 本实验电路,发射芯片第1~8脚(A0~A7)接地,第11脚(A9)悬空,第12脚(A10)接地,第10脚(A8)和第13脚(A11)分别由按键S1(+)和S2(-)控制,当按键按下时,管脚接高电平,按键不按动时,管脚接低电平。 将解码输出信号给单片机识别处理,可实现通信系统中的相关控制。本实验,单片机一旦识别到A8为00且A11为11,则输出相关控制字给BH1415(调频发射芯片),该芯片识别单片机输出的控制字,将发射载波频率按0.1MHz步进增大。单片机一旦识别到A8为11且A11为00,则输出相关控制字给BH1415(调频发射芯片),该芯片识别单片机输出的控制字,将发射载波频率按0.1MHz步进减小。模块上数码管LED6~LED9(单位为MHz)显示调频发射芯片的发射频率,开机默认为88MHz。 (二)调频/调幅接收系统原理 调频/调幅解调电路由索尼公司生产的CXA1691BM和少量外围元件组成。CXA1691BM既可以接收中波调幅信号,也可接收调频信号。它包含了中放、混频、限幅、鉴频、检波等电路,内部框图如图6-3所示。当开关S1向下拨时,CXA1691BM工作在调幅接收的状态,接收载频范围为535kHz~1605KHz。当开关S1向上拨时,CXA1691BM 工作在调频接收的状态,接收载频范围为88MHz~108MHz。