
启拓专业手拉手会议,矩阵切换厂商-全球抗干扰专家
麦克风波束成形的基本原理
麦克风波束成形是一个丰富而复杂的课题。所有MEMS麦克风都具有全向拾音响应,也就是能够均等地响应来自四面八方的声音。多个麦克风可以配置成阵列,形成定向响应或波束场型。经过设计,波束成形麦克风阵列可以对来自一个或多个特定方向的声音更敏感。本应用笔记仅讨论基本概念和阵列配置,包括宽边求和阵列和差分端射阵列,内容涵盖设计考虑、空间和频率响应以及差分阵列配置的优缺点。
阵列和差分端射阵列,内容涵盖设计考虑、空间和频率响应以及差分阵列配置的优缺点。
空气中声波的频率与波长的关系
方向性和极坐标图
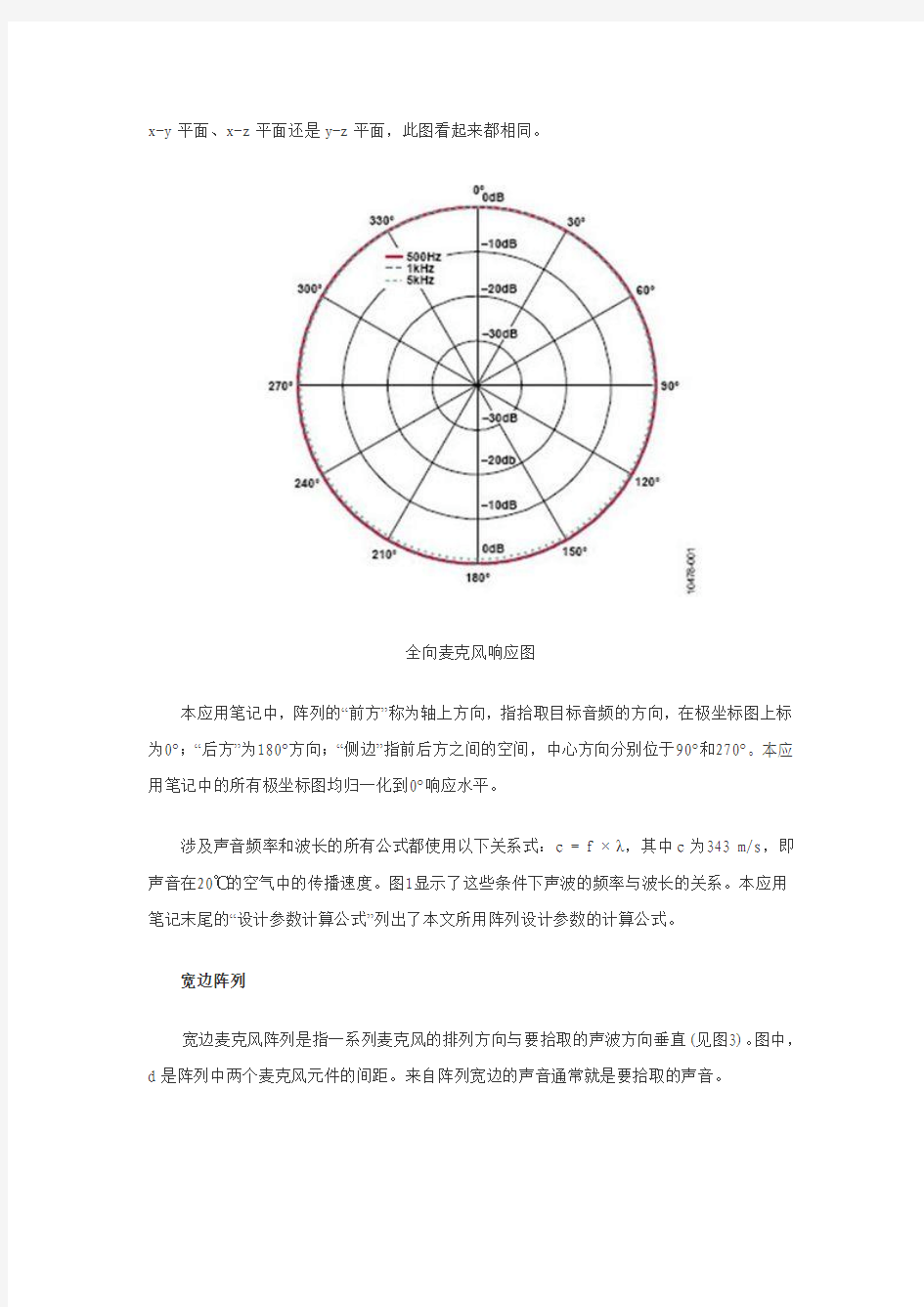
方向性描述麦克风或阵列的输出电平随消声空间中声源位置的改变而变化的模式。ADI 公司的所有MEMS麦克风都是全向麦克风,即它们对来自所有方向的声音都同样敏感,与麦克风所处的方位无关。图2所示为全向麦克风响应的2轴极坐标图。无论麦克风的收音孔位于
x-y平面、x-z平面还是y-z平面,此图看起来都相同。
全向麦克风响应图
本应用笔记中,阵列的“前方”称为轴上方向,指拾取目标音频的方向,在极坐标图上标为0°;“后方”为180°方向;“侧边”指前后方之间的空间,中心方向分别位于90°和270°。本应用笔记中的所有极坐标图均归一化到0°响应水平。
涉及声音频率和波长的所有公式都使用以下关系式:c = f ×λ,其中c为343 m/s,即声音在20℃的空气中的传播速度。图1显示了这些条件下声波的频率与波长的关系。本应用笔记末尾的“设计参数计算公式”列出了本文所用阵列设计参数的计算公式。
宽边阵列
宽边麦克风阵列是指一系列麦克风的排列方向与要拾取的声波方向垂直(见图3)。图中,d是阵列中两个麦克风元件的间距。来自阵列宽边的声音通常就是要拾取的声音。
双麦克风宽边阵列
宽边阵列可以通过基本处理实现,阵列中的麦克风简单地相加。此类阵列的缺点是它只能衰减来自阵列侧边的声音。后方响应始终与前方响应一致,因为阵列具有轴对称性,无法区分从前方与从后方到达麦克风的声压波。宽边阵列适用于阵列背面或上下方没有很多声音的应用,例如壁挂式电视。
在双麦克风宽边阵列中,响应的最小值出现在90°和270°。这些点的信号衰减在很大程度上取决于频率。当入射频率的半波长接近麦克风的间距时,响应接近完全抵消。对于两个间距75 mm的麦克风组成的阵列,理论上,当频率约为2.3 kHz (343 m/s ÷(0.075 m ×2)≈2.3 kHz)时,响应完全抵消。
高于理想衰减的频率时,频率将混叠,极坐标响应开始在其它角度显示零点。此时,侧边衰减再次开始降低。例如,图4中的3 kHz信号(淡蓝色线)发生混叠。
间距75mm的双麦克风宽边阵列的响应
频率响应
宽边波束成形器具有平坦的轴上频率响应,因为它只是将接收同一信号的两个麦克风的信号相加。图5显示了间距75 mm的双麦克风宽边波束成形器的归一化响应。在轴外,该图清楚地显示了响应的零点。
不同入射角时宽边波束成形器的归一化频率响应
具有更多元件的宽边阵列
也可以构建具有两个以上元件的宽边阵列,只需将额外的麦克风与原来的两个麦克风对齐,如图6所示。宽边阵列中的麦克风数量越多,对来自阵列侧边的声音的衰减就越强。图7显示了间距75 mm的三麦克风宽边阵列的响应。该阵列中,来自侧边的声音衰减6 dB,而在双麦克风宽边阵列中,声音只衰减3 dB。然而,发生混叠(立体交叉型)的频率现在更低,因为所有麦克风之间的总距离已从75 mm增加到150 mm。
三麦克风宽边阵列
间距75mm的三麦克风宽边阵列的响应
缩小宽边阵列中的麦克风间距可以提高混叠频率,但会降低低频时的衰减。设计宽边阵列时,必须权衡考虑这两个因素。对多麦克风宽边阵列中的各麦克风应用不同的加权系数,可以进一步减少混叠。此外,通过延迟各麦克风的输出,可以将宽边阵列的主响应角调整到前方以外的角度。系数和延迟的计算以及相应的极坐标图形超出了本应用笔记的范围。
端射阵列
在端射阵列中,多个麦克风的排列方向与声音传播的目标方向一致。如果阵列中前方麦克风(声音在轴上传播最先达到的麦克风)的信号与后方麦克风的反转延迟信号相加,则这种配置称为“差分阵列”。图8显示了一个双麦克风端射差分阵列,麦克风间距为d,后方麦克风的信号在到达减法(或反转求和)模块之前延迟n个采样周期。这可以用来创建心型、高心型或超心型拾音模式,其中来自阵列后方的声音被大大衰减。
双麦克风端射阵列
当麦克风间距和时间延迟均选择得当时,针对混叠频率以下的频率,延迟求和波束成形器的响应是心型图案(见图9)。心型图案不会衰减阵列前方的信号;理论上,它会完全消除以180°入射到阵列的声音。一阶(双麦克风)延迟求和波束成形器的侧边信号衰减6dB。
双麦克风端射心型波束成形器的响应
假设声音是可近似为平面波的远场传播,那么在端射阵列中,不同麦克风拾取的声音仅有到达时间上的差别。为了创建心型拾取模式,应当延迟来自后方麦克风的信号,延迟时间等于声波在两个麦克风元件之间传输所需的时间。这为设计端射波束成形器的系统设计工程师提供了两个自由度:麦克风的间距和应用于处理器的延迟时间。在许多音频应用中,延迟时间的选择取决于采样速率(fS)。如果DSP的延迟时间由单一样本的周期决定,则当fS= 48 kHz时,最短延迟为21μs。20°C时,声音在空气中的传播速度为343 m/s;因此声波在21μs内大约行进7 mm。利用不同滤波器,如延迟同步滤波器、全通滤波器和FFT滤波器组等,可以实现小数采样延迟,但此类处理超出了本文的范围。
与宽边阵列一样,麦克风的间距决定目标方向响应的第一个零点。麦克风之间距离越近,零点频率越高(因而带宽更宽)。距离越远,则阵列的物理长度越长,可能会与工业设计限制相抵触。再次假设fS= 48 kHz,取3样本延迟时间,则声音时间延迟约为63μs。这是声音行进约21 mm所需的时间,该距离即为实现心型图案所需的麦克风元件间距。8.2 kHz声波的半波长为21 mm,因此这就是零点频率。图10显示了图9所示相同端射配置的响应,此外还显示了10kHz
时的响应。除了后方的零点以外,大约±52°处还有两个零点。
双麦克风端射波束成形器的频率混叠
为实现良好性能的波束成形阵列,具有电气延迟的麦克风之间的距离匹配至关重要。图11显示了在保持延迟时间不变的同时改变麦克风之间物理距离的影响。本例同样使用3样本延迟时间,对应于大约21 mm的距离,以便实现心型响应图案(fS = 48 kHz)。当麦克风之间的距离小于21 mm时,后方零点并不突出,响应为准心型图案。当物理距离大于21 mm时,响应为高心型图案,两个后方零点相对于180°点等距分开。在需要抑制的不是正后方,而是稍微散开方向的应用中,这可能正合适,而且侧边抑制也强于心型响应的侧边抑制。
改变端射波束成形器麦克风距离的影响
频率响应
差分阵列波束成形器的频率响应不是平坦的,在零点频率范围内,它具有高通滤波器响应特征。一阶波束成形器(两个麦克风元件)的响应以6 dB/倍频程的速率随频率而提高,在混叠频率以上归于平坦。在零点频率,阵列理论上没有输出,因为延迟信号恰好与前方麦克风的信号抵消。
图12显示了不同入射角时双麦克风差分阵列波束成形器的频率幅度响应。图中,0 dB
点是单个全向麦克风输出电平。该波束成形器使用21 mm间距和3样本延迟时间,因此轴上
零点出现在大约8.2 kHz时。在轴上,响应以6 dB/倍频程的速率提高,直到入射信号的四
分之一波长与麦克风间距相同时。过了这一点后,响应降低到零点,然后再次在3/4波长点时提高到最大值。除了阵列元件间距与入射信号半波长相同时的轴上零点以外,在半波长的各倍数处也存在零点。
不同入射角时端射波束成形器的频率响应
注意,入射角为90°的信号响应比入射角为0°的信号响应低6 dB,在轴上零点频率时具有最大输出电平。
差分波束成形算法的输出通常会应用一个均衡(EQ)滤波器,以使响应平坦。
零点频率应适当选择,不应干扰目标频率,但又不能太高,以至于造成低频信号被过分衰减。在使用单样本延迟时间(fS= 48 kHz)和7 mm麦克风间距的端射差分阵列中,零点频率约为24.5 kHz。如果麦克风间距为84 mm,并且使用6样本延迟时间,则混叠频率为4.2 kHz。设计通常要求零点频率位于以上两者之间,这样既不至于太低,导致零点频率干扰语音的带宽,又不至于太高,导致低频响应被高度衰减。基于这样要求,麦克风间距的选择一般要与两个到四个样本的延迟时间匹配。同样,以上均假设fS= 48 kHz。所有这些计算均与采样速率成线性比例关系。
高阶端射阵列
通过增加更多的麦克风并使它们与最初的两个对齐,可以构成高阶差分阵列波束成形器。这将能更好地抑制来自后方和侧边的声音,但是,构建波束成形器的物理距离当然也更长。图13显示了一个二阶(三麦克风)端射波束成形器的例子。在阵列后方的零点相同的情况
下,二阶端射波束成形器可以实现12 dB的侧边衰减,如图14所示。图中,蓝色线是一阶(双麦克风)波束成形器的响应,红色线是二阶波束成形器的响应。
二阶差分波束成形阵列
一阶与二阶端射波束成形器的比较
对于更高阶端射波束成形器,可以运用同样的思路,不过阵列尺寸显然会增大。
麦克风匹配
为实现良好性能的麦克风波束成形器,阵列中不同元件的灵敏度和频率响应必须精密匹配。如果不同元件的这两个参数有差异,就无法实现阵列的期望响应,零点可能不那么突出,阵列的方向性可能不是很恰当。ADI公司MEMS麦克风的灵敏度和频率响应均精密匹配,非常适合用于波束成形阵列。
阵列处理对系统噪声的影响
对信噪比(SNR)的影响取决于阵列配置和处理,阵列拓扑结构不同,可能会导致系统SNR 提高或降低。必须选择SNR规格最高的麦克风,从而使总体系统性能最高。
在轴上,宽边波束成形器的输出类似于将两个相同信号简单相加以改善SNR。在宽边求和阵列中,多个麦克风本身的噪声以指数形式相加。因此,麦克风数量每增加一倍,噪声就会提高3 dB。这种情况下,信号电平加倍,提高6 dB,而噪声则以非相干形式相加,总电平仅提高3 dB,因此SNR性能提高3 dB。在轴外,此波束成形器的信号输出不是平坦的,如图5所示。在轴外入射角,由于信号电平降低,SNR低于轴上峰值。
差分阵列对SNR的影响更复杂,在此不进行量化分析。对于波长为麦克风间距2倍的频率(在图12所示例子中,此频率约为4.1 kHz),双麦克风差分阵列波束成形器的轴上频率响应为6 dB。在此频率附近,阵列信号的输出与其噪声的差别高于各麦克风的输出与其噪声的差别,但整个频率范围内的信噪比关系更加难以计算。
多个麦克风的放置
阵列中麦克风收音端口之间的线性距离只是构建麦克风阵列时需要考虑的路径之一。虽然ADI公司的MEMS麦克风非常薄,但仍有一定的高度,进行阵列设计时应当予以考虑。ADI 公司MEMS麦克风薄膜上的声学中心位于收音端口以上0.57 mm。除了麦克风所在PCB的厚度
以外,选择麦克风间距时还应考虑此距离。如果所有麦克风都以同样的方式安装(同一PCB、相同收音端口长度),那么这不是一个问题。
高级波束成形
本应用笔记仅仅讨论了麦克风波束成形的基本原理,并未详细介绍这一处理领域。采用不同数量麦克风和不同配置的阵列显然是可行的,其信号处理算法的复杂度可能远远超过本文所述的简单算法。更高级的算法可以用于语音跟踪和波束导引,甚至只需少量麦克风。
本文所述的阵列均为线性分布,但在更高级的高阶波束成形器中,各对麦克风之间的间距可以不同。这种配置会改变零点和混叠频率以及不同麦克风的信噪比,有可能使阵列的噪声更低,可用频率响应更宽。
基于麦克风阵列的语音增强方法 概述:在日常生活和工作中,语音通信是人与人之间互相传递信息沟通不可缺少的方式。在语音通信中,语音信号不可避免地会受到来自周围环境和传输媒介的外部噪声、通信设备的内部噪声及其他讲话者的干扰。这些干扰共同作用,最终使听者获得的是被噪声污染过的带噪声语音,严重影响了双方之间的交流。应用阵列信号处理技术的麦克风阵列能够充分利用语音信号的空时信息,具有灵活的波束控制、较高的空间分辨率、高的信号增益与较强的抗干扰能力等特点,逐渐成为强噪声环境中语音增强的研究热点。本文将介绍各种麦克风阵列语音增强方法,并总结各个方法的优劣。最终得出更好的、能够去噪的基于麦克风阵列的语音增强方法。 1麦克风阵列 麦克风阵列是将两个麦克风的信号耦合为一个信号。在频率响应中也可以根据时域中波束形成与空间滤波器相仿的应用,分析出接收到语音信号音源的方向以及其变化。采用该技术,能利用两个麦克风接收到声波的相位之间的差异对声波进行过滤,能最大限度将环境背景声音滤掉,只剩下需要的声波。对于在嘈杂的环境下使用采用了这种配置的设备,在嘈杂的环境下能使听者听起来很清晰,没杂音。 2基于麦克风阵列的语音增强方法 2.1基于自适应波束形成器的麦克风阵列语音增强 自适应波束形成是现在广泛使用的一类麦克风阵列语音增强方法。最早出现的自适应波束形成算法,其基本思想是在某方向有用信号的增益一定的前提下,使阵列输出信号的功率最小。在线性约束最小方差自适应波束形成器的基础上,1982 年Griffiths 和Jim 提出了广义旁瓣消除器成为了许多算法的基本框架。 广义旁瓣消除器(GSC)的工作原理是带噪声的语音信号同时通过自适应通道和非自适应通道,自适应通道中的阻塞矩阵将有用信号滤除后产生仅包含多通道噪声参考信号,自适应滤波器根据这个参考信号得到噪声估计,最后由这个被估计的噪声抵消非自适应通道中的噪声分量,从而得到有用的纯净语音信号。 麦克风阵列的自适应算法通过迭代运算获取波束形成的最优权矢量时,噪声模型的估计是一个非常关键的因素。它的好坏直接影响着系统波束形成的性能。系统地分析了最小均方( LMS) 自适应语音增强算法,并针对阻塞矩阵在估计噪声时存在的缺陷,在该算法的基础上提出了一种利用最小值控制递归平均( MCRA) 来估计噪声的方法。将此方法应用于波束形成,MCRA 估计出的噪声使LMS 自适应语音增强的效果更好和抗噪性更强。 2.2基于固定波束形成的麦克风阵列语音增强 固定波束形成技术是最简单最成熟的一种波束形成技术。1985 年美国学者Flanagan 提出采用延时-相加波束形成方法进行麦克风阵列语音增强,该方法通过对各路麦克风接收到的信号添加合适的延时补偿,使得各路输出信号在某一方向上保持同步,并在该方向的入射信号获得最大增益。此方法易于实现,但要想获取较高的噪声抑制能力则需要增加麦克风数目,然而对非相干噪声没有抑制能力,环境适应性差,因此实际中很少单独使用。后来出现的微分麦克风阵列、超方向麦克风阵列和固定频率波束形成技术也属于固定波束形成。 采用可调波束形成器的GSC麦克风阵列语言增强算法,其实质在GSC结构中的固定波束形成器前端引入各通道可调时延补偿,构造可调波束形成器进行声源方位估计,从而在目标声源方位获取阶段即可利用阵列的空间增益来提高方位估计性能。延迟求和波束形成器主要目的是增强主瓣方向目标信号,而抑制其他方向的噪声信号。
实验3 均匀间距线列阵波束形成器 姓名:逯仁杰 班级:20120001(12级赓1班) 学号:2012011112
1.实验目的 通过本实验的学习,加深对《声纳技术》中波束形成和方位估计的概念理解,理解声纳信号处理的基本过程,为今后声纳信号处理的工作和学习建立概念、奠定坚实的基础。 2.实验原理 波束形成器的本质是一个空间滤波器。当对基阵各基元接收信号作补偿处理,使得各基元对某个特定方向上的信号能够同相相加,获得一个最大的响应输出(幅度相加);相应的各基元对其它方向的信号非同相相加,产生一定的相消效果的响应输出(对于各基元噪声相互独立的情况时功率相加)。这就是波束形成的工作原理。 常用的波束形成方法主要有时延波束形成法和频域波束形成法。在此基础上针对不同的阵形、设计要求以及背景噪声特性下还发展了许多波束形成算法。针对不同的阵形时的波束形成方法是指依赖于阵形的特殊性(如直线阵、圆阵、体积阵等)而得到的波束形成算法:如直线阵波束形成法、圆阵波束形成法,体积阵波束形成法等。 针对不同的设计要求也衍生出多种新型的波束形成算法。当对不同的频率响应要求相同的波束宽度时有恒定束宽波束形成法,当对波束的旁瓣级有要求时可采用切比雪夫加权波束形成法。当要求对阵列误差具有宽容性响应时失配条件下的波束形成器[6,362-382]。 如果利用噪声干扰的统计特性有高分辨最小方差无畸变响应(MVDR)波束形成法,线性约束最小方差(LCMV)波束形成法,线性约束最小功率(LCMP)波束形成法,自适应波束形成法等。 但不管是何种波束形成方法,其目的均是在干扰背景下获取某个方向的信号或估计信号的方位。下面仅给出时延波束形成和相移波束形成的基本原理。 时延波束形成法(时域)
麦克风阵列模组设计方案 一、麦克风阵列基本原理 二、麦克风阵列的应用 三、麦克风阵列模组的设计 一、麦克风阵列基本原理 阵列(Array): 数学定义--有限个相同资料形态之元素组成之集合 麦克风阵列是指按一定距离排列放置的一组麦克风,通过声波抵达阵列中每个麦克风之间的微小时差的相互作用,麦克风阵列可以得到比单个的麦克风更好地指向性。在麦克风阵列的设计中首要的改进是引入了波束成形、阵列指向性与波束宽度的概念。 波束的形成 通过对所有麦克风信号的综合处理,麦克风阵列可以组合成为所要求的强指向性麦克风,形成被称为“波束”的指向特性。麦克风阵列的波束可以经由特殊电路或程序算法软件控制使其指向声源方向而加强音频采集效果。 阵列算法处理后的指向性波束形成技术能精确的形成一个锥状窄波束,只接受说话人的声音同时抑制环境中的噪音与干扰。
图一使用单麦克风与采用波束形成技术麦克风阵列接收讲话者声音效果的对比
阵列指向性 由于麦克风阵列的输出信号中包含比单只麦克风更低的噪声和回声成份, 。麦克风阵列在1000Hz的典型指所以其固有噪声抑制能力要远高于单只麦克风。 所以其固有噪声抑制能力要远高于单只麦克风 向性波束图型如图二所示。其指向性图形要远好于任一款价格昂贵的高性能超心形麦克风。 图二麦克风阵列在1000Hz的典型指向性波束图型
指向性指数 另一个表证波束的参数是指向性指数。 波束轴线))检测到指向性指数D表征的是麦克风阵列主响应轴(波束轴线 的声源信号与需要屏蔽的各种噪声与回声信号的比值
二麦克风阵列的应用 正确的麦克风阵列几何排列(数量,类型及麦克风的位置)关系到最后的声学效果。为了保证成功的设计和用户满意度,双元件麦克风阵列适用于在较安静的办公场所及室内的条件使用。这种阵列形成的是水平方向压缩后的较窄波束,使用时应将两个麦克风连线中点指向讲话者。其几何排布如图三、图四所示 图三小型双麦克风阵列图四大型双麦克风阵列 四元件麦克风阵列适用于在一般的办公场或较嘈杂的环境使用,当讲话者到麦克风的距离达到3-5M距离时,仍有很好的录音效果,见图五、图六 图五4麦克风阵列图六L-形状的4麦克风阵列
3.5 两种特殊的波束形成技术 3.5.1协方差矩阵对角加载波束形成技术 常规波束形成算法中,在计算自适应权值时用XX R ∧ 代替其中的X X R 。由于采样快拍数是有限的,则通过估计过程得到的协方差矩阵会产生一定误差,这样会引起特征值扩散。从特征值分解方向来看,自适应波束畸变的原因是协方差矩阵的噪声特征值扩散。自适应波束可以认为是从静态波束图中减去特征向量对应的 特征波束图,即:m in 1 ()()( )()(()())N i V V iv iv V i i G Q E E Q λλθθθθθλ* =-=-∑,其中()V G θ是 是自适应波束图,()V Q θ是静态波束图,即没有来波干扰信号而只有内部白噪声时的波束状态。i λ是矩阵X X R 的特征值。()iv E θ是对应i λ的特征波束图。 由于X X R 是 Hermite 矩阵,则所有的特征值均为实数,并且其特征向量正交,特征向量对应的特征波束正交。而最优权值的求解表达其中的X X R 是通过采样数据估计得到的,当采样快拍数很少时,对协方差矩阵的估计存在误差,小特征值及对应的特征向量扰动都参与了自适应权值的计算,结果导致自适应波束整体性能的下降。鉴于项目中的阵列形式,相对的阵元数较少,采样数据比较少,很容易在估计协方差矩阵的时候产生大的扰动,导致波束的性能下降,所以采用对角加载技术来保持波束性能的稳定及降低波束的旁瓣有比较好的效果。 (1)对角加载常数λ 当采样数据很少时,自适应波束副瓣很高,SINR 性能降低。对因采样快拍数较少引起自相关矩阵估计误差而导致的波束方向图畸变,可以采用对角加载技术对采样协方差矩阵进行修正。修正后的协方差矩阵为:XX XX R R I λ∧ =+ 。 自适应旁瓣抬高的主要原因是对阵列天线噪声估计不足,造成协方差矩阵特征值分散。通过对角加载,选择合适对角加载λ ,则对于强干扰的大特征值不会受到很大影响,而与噪声相对应的小特征值加大并压缩在λ附近,于是可以得到很好的旁瓣抑制效果。对于以上介绍的通过 LCMV 准则求得的权值o p t w 经过对角加载后的最优权值为:111()(())H opt XX XX w R I A A R I A f λλ---=++ (2)广义线性组合加载技术 对角加载常数λ 来修正采样协方差矩阵,能够有效实现波束旁瓣降低的同时提高波束的稳健性。但是对加载值λ 的确定有一定难度,目前还是使用经验值较多。于是,来考虑另外一种能够有效实现协方差矩阵的修正,而且组合参数
CAPON 波束形成器仿真 1.实验原理 波束形成就是从传感器阵列重构源信号。(1)、通过增加期望信源的贡献来实现;(2)、通过抑制掉干扰源来实现。经典的波束形成需要观测方向(期望信源的方向)的知识。盲波束形成试图在没有期望信源方向信息的情况下进行信源的恢复。 波束形成技术的基本思想是:通过将各阵元输出进行加权求和,在一时间内将天线阵列波束“导向”到一个方向上,对期望信号得到最大输出功率的导向位置即给出DOA 估计。 虽然阵列天线的方向图是全方向的,但阵列的输出经过加权求和后,却可以被调整到阵列接收的方向增益聚集在一个方向上,相当于形成了一个”波束”。这就是波束形成的物理意义所在。 在智能天线中,波束形成是关键技术之一,是提高信噪比、增加用户容量的保证,能够成倍地提高通信系统的容量,有效地抑制各种干扰,并改善通信质量。 波束形成器的最佳权向量w 取决于阵列方向向量)(a k θ ,而在移动通信里用户的方向向量一般未知,需要估计(称之为DOA 估计)。因此,在计算波束形成的最佳权向量之前,必须在已知阵列几何结构的前提下先估计期望信号的波达方向。 Capon 波束形成器求解的优化问题可表述为 w arg min P(w)θ= 其约束条件为 1)(a w H =θ Capon 波束形成器在使噪声和干扰所贡献的功率为最小的同时,保持了期 望信号的功率不变。因此,它可以看作是一个尖锐的空间带通滤波器。最优加 权向量w 可以利用Lagrange 乘子法求解,其结果为 )(a R ?)(a )(a R ?w 1H 1CAP θθθ--=
当μ不取常数,而取作 )(a R ?)(a 11H θθμ-=时,最佳权向量就转变成Capon 波束形成器的权向量。空间谱为 )(a R ?)(a 1)(P 1-H CAP θθθ= 2.变量定义 M :均匀线阵列数目 P :信号源个数 nn :快拍数 angle1、angle2、angle3:信号来波角度 u :复高斯噪声 Ps :信号能量 refp :信噪比(实值) X :接收信号 Rxx :接收信号的相关矩阵 doa :波达方向估计 3.仿真结果 采用上述算法进行仿真,结果如图所示。 在本仿真程序中,我们采用16个均匀线阵列,3个信号源,来波角度分别为5?、45?、20-?,信噪比均为10dB ,噪声为复高斯白噪声,快拍数1000。 由仿真结果看出,capon 波束形成器较好的给出了信号的doa 估计,但是在仿真的过程中,我们发现,capon 算法具有很大的局限性,其对扰和噪声是比较敏感的。 4.程序 clear all i=sqrt(-1); j=i; M=16; %均匀线阵列数目 P=3; %信号源数目 f0=10;f1=50;f2=100;%信号频率 nn=1000; %快拍数
线性麦克风阵列定向性能的研究? 段进伟, 史元春, 陈孝杰 (清华大学计算机科学与技术系,北京市海淀区, 100084) Study on the Directing Performance of the Linear Microphone Array Duan Jin-wei, Shi Yuan-chun, Chen Xiao-jie (Department of Computer Science and Technology, Tsinghua University, Beijing, 100084, China) + Corresponding author: Phn: +86-010-********-805, E-mail: saundradjw945@https://www.doczj.com/doc/8534490.html, Received 2007-07-31; Accepted 2007-08-31 Abstract: Speech source localization technology, using microphone array, plays an important role in the area of human-computer interaction, especially that in smart space. The information of source position provided by the microphone array can be used in many place, such as dynamically adjust the parameters of the array in order to acquire high-quality speech audio, etc. Therefore, speech source localization has become a hot topic in both research and application areas. The objective of this paper is to analyze the affection on the symmetrical linear microphone array directing performance caused by the changes of microphone numbers, the spacing between microphones, the sampling frequency and so on. In order to accomplish this, we set up two linear microphone arrays with different hardware and designed comparative experiments. After the speech data was captured, an algorithm called SRP-PHAT was used to estimate the speech source direction. We analyzed the possible theoretic errors existed in the experiments carefully, and after the experiments, we analyzed the directing results, and compared the actual directing errors with the possible theoretic errors. At last, we summarized the performance of the two linear microphone arrays, and educed the configuration of the linear microphone array system when its integrative performance achieves the peak. Key words: linear microphone array; speech source directing; theoretic error; directing performance 摘 要: 麦克风阵列在人机交互中有着重要的研究和应用价值。而线性均匀麦克风阵列最简单,其基本功能是声源的定向。本文通过实验分析各种参数变化对线性麦克风阵列定向性能的影响。我们搭建了硬件参数不同的两套线性麦克风阵列并设计了对比实验。使用SRP-PHAT算法定向声源。我们分析了声源定向时各种可能的理论误差,对实验结果进行了误差分析,并与可能的理论误差做了对比。通过理论分析和对比实验,本文提出了线性麦克风阵列系统的性能评价指标,并给出了综合性能最优时的麦克风阵列系统参数配置。 关键词: 线性麦克风阵列; 声源定向; 理论误差; 定向性能 中图法分类号: ****文献标识码: A ?Supported by National High-Tech Research and Development Plan of China under Grant No. 2006AA01Z198; 作者简介: 段进伟(1985-),男,云南昆明人,大学本科,主要研究领域为人机交互与普适计算;
龙源期刊网 https://www.doczj.com/doc/8534490.html, 大规模MIMO阵列波束形成 作者:阮西玥杨鑫贾曼华 来源:《科技视界》2019年第15期 【摘要】毫米波通信凭借通信容量大、传输质量高等优点被5G系统采用,并且其中的大规模天线阵列和波束形成技术已经成为5G系统中的关键组成部分。本文主要研究了毫米波通信系统中的波束形成技术。首先研究IEEE 802.15.3c标准规定的3c码本和N相位码本。并针对基于以上两种码本产生的波束旁瓣电平过高的问题,本文提出将均匀窗、二项式窗、汉明窗和高斯窗等6种常见的窗函数应用在码本矩阵中的方法,由此获得更优的波束性能。除此之外,还深入研究了3c码本和圆阵码本两种码本的训练机制。 【关键词】毫米波通信;大规模天线阵列;波束形成 中图分类号: U216.6 文献标识码: A 文章编号: 2095-2457(2019)15-0004-002 DOI:10.19694/https://www.doczj.com/doc/8534490.html,ki.issn2095-2457.2019.15.002 Large-Scale MIMO Array Beamforming RUAN Xi-yue YANG Xin JIA Man-hua (Nanjing university of aeronautics and astronautics, Nanjing Jiangsu 210000, China) 【Abstract】Millimeter wave communication is adopted by 5G systems due to its large communication capacity and high transmission quality, and its large-scale antenna array and beamforming technology have become a key component in 5G systems. This paper mainly studies the beamforming technology in millimeter wave communication systems. First, study the 3c codebook and N-phase codebook specified in the IEEE 802.15.3c standard. For the problem that the beam sidelobe level generated by the above two codebooks is too high, this paper proposes to apply six common window functions such as uniform window, binomial window, Hamming window and Gaussian window to the codebook matrix. The method in which the better beam performance is obtained. In addition, the training mechanism of the 3c codebook and the circular matrix codebook is studied in depth. 【Key words】Millimeter-wave communications;Large-scale antenna arrays;Beamforming 1 波束基本概念
- 29 - 基于麦克风阵列的语音增强算法概述 丁 猛 (海军医学研究所,上海 200433) 【摘 要】麦克风阵列语音增强技术是将阵列信号处理与语音信号处理相结合,利用语音信号的空间相位信息对语音信号进行增强的一种技术。文章介绍了各种基于麦克风阵列的语音增强基本算法,概述了各算法的基本原理,并总结了各算法的特点及其所适用的声学环境特性。 【关键词】麦克风阵列;阵列信号处理;语音增强 【中图分类号】TN911.7 【文献标识码】A 【文章编号】1008-1151(2011)03-0029-02 (一)引言 在日常生活和工作中,语音通信是人与人之间互相传递信息沟通不可缺少的方式。近年来,虽然数据通信得到了迅速发展,但是语音通信仍然是现阶段的主流,并在通信行业中占主导地位。在语音通信中,语音信号不可避免地会受到来自周围环境和传输媒介的外部噪声、通信设备的内部噪声及其他讲话者的干扰。这些干扰共同作用,最终使听者获得的语音不是纯净的原始语音,而是被噪声污染过的带噪声语音,严重影响了双方之间的交流。 应用阵列信号处理技术的麦克风阵列能够充分利用语音信号的空时信息,具有灵活的波束控制、较高的空间分辨率、高的信号增益与较强的抗干扰能力等特点,逐渐成为强噪声环境中语音增强的研究热点。美国、德国、法国、意大利、日本、香港等国家和地区许多科学家都在开展这方面的研究工作,并且已经应用到一些实际的麦克风阵列系统中,这些应用包括视频会议、语音识别、车载声控系统、大型场所的记录会议和助听装置等。 文章将介绍各种麦克风阵列语音增强算法的基本原理,并总结各个算法的特点及存在的局限性。 (二)常见麦克风阵列语音增强方法 1.基于固定波束形成的麦克风阵列语音增强 固定波束形成技术是最简单最成熟的一种波束形成技术。1985年美国学者Flanagan 提出采用延时-相加(Delay-and-Sum)波束形成方法进行麦克风阵列语音增强,该方法通过对各路麦克风接收到的信号添加合适的延时补偿,使得各路输出信号在某一方向上保持同步,并在该方向的入射信号获得最大增益。此方法易于实现,但要想获取较高的噪声抑制能力则需要增加麦克风数目,然而对非相干噪声没有抑制能力,环境适应性差,因此实际中很少单独使用。后来出现的微分麦克风阵列(Differential Microphone Arrays)、超方向麦克风阵列(Superairective Microphone Arrays )和固定频率波束形成(Frequency-Invariant Beamformers) 技术也属于固定波束形成。 2.基于自适应波束形成器的麦克风阵列语音增强 自适应波束形成是现在广泛使用的一类麦克风阵列语音增强方法。最早出现的自适应波束形成算法是1972年由Frost 提出的线性约束最小方差(Linearly Constrained Minimum Variance,LCMV)自适应波束形成器。其基本思想是在某方向有用信号的增益一定的前提下,使阵列输出信号的功率最小。在线性约束最小方差自适应波束形成器的基础上,1982年Griffiths 和Jim 提出了广义旁瓣消除器(Generalized Sidelobe Canceller, GSC),成为了许多算法的基本框架(图1)。 图1 广义旁瓣消除器的基本结构 广义旁瓣消除器是麦克风阵列语音增强应用最广泛的技术,即带噪声的语音信号同时通过自适应通道和非自适应通道,自适应通道中的阻塞矩阵将有用信号滤除后产生仅包含多通道噪声参考信号,自适应滤波器根据这个参考信号得到噪声估计,最后由这个被估计的噪声抵消非自适应通道中的噪声分量,从而得到有用的纯净语音信号。 如果噪声源的数目比麦克风数目少,自适应波束法能得到很好的性能。但是随着干扰数目的增加和混响的增强,自适应滤波器的降噪性能会逐渐降低。 3.基于后置滤波的麦克风阵列语音增强 1988年Zelinski 将维纳滤波器应用在麦克风阵列延时—相加波束形成的输出端,进一步提高了语音信号的降噪效果,提出了基于后置滤波的麦克风阵列语音增强方法(图2)。基于后置滤波的方法在对非相干噪声抑制方面,不仅具有良好的效果,还能够在一定程度上适应时变的声学环境。它的基本原理是:假设各麦克风接收到的目标信号相同,接收到的噪声信号独立同分布,信号和噪声不相关,根据噪声特性, 【收稿日期】2010-12-30 【作者简介】丁猛(1983-),男,海军医学研究所研究实习员。
一文带你全面熟悉智能语音之麦克风阵列技术的原理 麦克风阵列(Microphone Array),从字面上,指的是麦克风的排列。也就是说由一定数目的声学传感器(一般是麦克风)组成,用来对声场的空间特性进行采样并处理的系统。 早在20世纪70、80年代,麦克风阵列已经被应用于语音信号处理的研究中,进入90年代以来,基于麦克风阵列的语音信号处理算法逐渐成为一个新的研究热点。而到了“声控时代”,这项技术的重要性显得尤为突出。 麦克风阵列能干什么? 任何一项技术的发生发展都伴随着问题的提出及解决,麦克风阵列也是如此。那么它主要应用在哪些场景下呢?又有着怎样的功能! ◆【噪声环境怎么破?】——语音增强(Speech Enhancement) 语音增强是指当语音信号被各种各样的噪声(包括语音)干扰甚至淹没后,从含噪声的语音信号中提取出纯净语音的过程。所以DingDong在嘈杂环境下,也能准确识别语音指令。通过麦克风阵列波束形成进行语音增强示意图 从20世纪60年代开始,Boll等研究者先后提出了针对使用一个麦克风的语音增强技术,称为单通道语音增强。因为它使用的麦克风个数最少,并且充分考虑到了语音谱和噪声谱的特性,使得这些方法在某些场景下也具有较好的噪声抑制效果,并因其方法简单、易于实现的特点广泛应用于现有语音通信系统与消费电子系统中。 但是,在复杂的声学环境下,噪声总是来自于四面八方,且其与语音信号在时间和频谱上常常是相互交叠的,再加上回波和混响的影响,利用单麦克风捕捉相对纯净的语音是非常困难的。而麦克风阵列融合了语音信号的空时信息,可以同时提取声源并抑制噪声。 目前科大讯飞已经实现了基于线性阵列、平面阵列以及空间立体阵列的波束形成和降噪技术,效果均达到业界一流水平。 2013年科大讯飞车载降噪产品和国际竞争对手效果对比 ◆【说话人老是变幻位置怎么破?】——声源定位(Source Localization)
MVDR自适应波束形成算法研究 摘要 波束形成技术和信号空间波数谱估计是自由空间信号阵列处理的两个主要研究方面。MVDR是一种基于最大信干噪比(SINR)准则的自适应波束形成算法。MVDR算法可以自适应的使阵列输出在期望方向上功率最小同时信干噪比最大。将其应用于空间波数谱估计上可以在很大程度上提高分辨率和噪声抑制性能。本文将在深入分析MVDR算法原理的基础上,通过计算机仿真和海上试验数据处理的结果,分析了MVDR算法在高分辨率空间波数谱估计应用中的性能。同时通过比较对角加载前后的数据处理结果,分析对角加载对MVDR的改进效果。 关键词:波束形成;空间波数谱估计;MVDR;对角加载
Study of MVDR Self-adapting Beam-forming Algorism Abstract Beamforming technology and signal special beam-number spectral estimation are the two major researching emphasis in array signal processing. MVDR is a self-adapting algorism based on the maximal SINR principle. It can self-adaptingly make the array output reach maximum on the expected direction with the lowest SINR. Applying this algorism to special beam-number spectral estimation can to great extent increase the resolution and the inhibition capability. This paper makes a further analysis of MVDR algorism with the result of computer emulation and the processing of experimental data. Furthermore, this paper also shows the improvement of diagonal-loading technology to MVER algorism. Keywords: Beam-forming ;Spatial Wave-number spectral estimation;MVDR;Diagonal loading
麦克风阵列结构设计建议和方案参考 1. 目的 本文档主要用于指导麦克风阵列的在产品应用中的麦克结构设计参考和建议。 2. 麦克风结构总体设计要求 1) 麦克风阵列需要减震密封处理,为保证麦克风的声音采集效果,能够满足语音识别和算法要求,通常采用将麦克风固定于硅胶套内(硅胶软硬度可根据实际结构形式进行匹配验证),且麦克风和硅胶之间有腔体存在; 2) 麦克风阵列的数量、间距及安装位置要满足算法要求; 3) 根据产品结构型式和产品需求,通常麦克风阵列的结构设计有两种型式:面壳安装方式和非面壳安装方式,两种方式的结构设计要求和建议参照下述方案说明。 3. 不同结构型式麦克风阵列结构设计方案介绍和说明 3.1 面壳安装方式方案 该结构方案麦克风阵列和硅胶套装配后固定于面壳上,通过面壳上的拾音孔进行录音采集。 a) 3D 截面效果图 b) 设计说明 (1) 麦克风阵列的数量、间距和安装位置满足算法要求; (2) 麦克风固定于硅胶套内,且注意麦克风和硅胶套及硅胶套上端和面壳内表面一定不能 有空腔存在(避免腔体反射对麦克风录音效果影响); (3) 麦克风拾音端面和面壳拾音孔外表面之间距离越短越好,最长不要超过3mm ; (4) 根据应用场景情况,可在麦克风表面增加防风棉(类似车载空调风直吹场景) 和防尘
棉等零件。 3.2 非面壳安装方式: 该结构形式通常麦克风阵列固定于密封减震硅胶套内,然后整个麦克风单元固定于PCB 上。 a) 3D 效果图 b) 设计说明 (1) 设计说明麦克风阵列的数量、间距和安装位置满足算法要求 (2) 麦克风阵列之间应保证通透性,麦克风相互之间不能有隔板等障碍物阻挡 (3) 麦克风单元上部(例如图1中的上方主板外壳B )和麦克风拾音端面至少留5mm 的通透空间,如果是指向性麦克风,注意麦克风器件下方要留麦克风器件背面拾 音孔空间和距离。
目录 一、绪论 (1) 1.1 课题研究背景和意义 (1) 1.2 国内外研究现状和发展趋势 (2) 1.2.1研究历史和现状 (2) 1.2.2发展趋势 (2) 1.3本文所要研究的内容 (2) 二、麦克风阵列的处理模型和方法介绍 (4) 2.1麦克风阵列信号处理模型 (4) 2.1.1远场模型 (4) 2.1.2远场麦克风阵列均匀线阵模型 (5) 2.2基于时延估计声源定位方法的介绍 (6) 2.2.1广义互相关时延估计法 (6) 2.2.2互功率谱相位时延估计法 (7) 2.2.3基于基音加权的时延估计法 (7) 2.2.4基于声门脉冲激励的时延估计法 (7) 2.2.5 基于LMS 的自适应时延估计法[8] (8) 2.2.6 基于子空间分解的时延估计法 (9) 2.2.7基于声学传递函数比的时延估计法 (9) 三、麦克风声源定位的研究与设计 (11) 3.1广义互相关时延估计设计流程 (11) 3.2 时延估计定位算法实验研究 (12) 3.3互相关延时估计方法 (12) 3.4互相关延时估计加权函数性能分析 (15) 3.5声源定位的模型分析 (16) 3.6时延估计的测量与计算 (17) 四、总结 (20) 4.1 本文研究的问题与难点 (20) 4. 2课题研究总结 (20) 参考文献 (22) 致谢 (24) 摘要 随着科技的进步和发展,麦克风阵列的声源定位技术已经成为人们研究的重要课题之一。用麦克风阵列接受语音信号就是声源定位技术的一种,接受到的语音技术再输出到计算机,经过计算机技术的分析和处理,然后可以确定声源是从
哪个方位传过来的。声源定位技术的广泛应用在许多领域,如定位技术,在军事上的语音识别,视频会议的定位技术。麦克风阵列对于噪声、声源定位、跟踪这些方面都比单个麦克风要好,从而大大提高语音信号处理质量。 本文主要是用麦克风阵和时延估计声源定位方法对于声源的定位。首先介绍了几种常见的声源定位方法和各自的优缺点,在此基础上研究基于时延估计的声源定位方法(GCC),比较远场定位和近场定位的差别,确定本文研究的方法远场定位法。由于远场定位时,只需要测出声音信号到达各个麦克风阵列的时延(TDOA),剩下的就是简单的数学公式推导。由于该方法计算量小,易于实现的优点,实际应用比较广泛。 关键词:麦克风阵列,声源定位,时延估计,GCC
启拓专业手拉手会议,矩阵切换厂商-全球抗干扰专家 麦克风波束成形的基本原理 麦克风波束成形是一个丰富而复杂的课题。所有MEMS麦克风都具有全向拾音响应,也就是能够均等地响应来自四面八方的声音。多个麦克风可以配置成阵列,形成定向响应或波束场型。经过设计,波束成形麦克风阵列可以对来自一个或多个特定方向的声音更敏感。本应用笔记仅讨论基本概念和阵列配置,包括宽边求和阵列和差分端射阵列,内容涵盖设计考虑、空间和频率响应以及差分阵列配置的优缺点。 阵列和差分端射阵列,内容涵盖设计考虑、空间和频率响应以及差分阵列配置的优缺点。 空气中声波的频率与波长的关系 方向性和极坐标图 方向性描述麦克风或阵列的输出电平随消声空间中声源位置的改变而变化的模式。ADI 公司的所有MEMS麦克风都是全向麦克风,即它们对来自所有方向的声音都同样敏感,与麦克风所处的方位无关。图2所示为全向麦克风响应的2轴极坐标图。无论麦克风的收音孔位于
x-y平面、x-z平面还是y-z平面,此图看起来都相同。 全向麦克风响应图 本应用笔记中,阵列的“前方”称为轴上方向,指拾取目标音频的方向,在极坐标图上标为0°;“后方”为180°方向;“侧边”指前后方之间的空间,中心方向分别位于90°和270°。本应用笔记中的所有极坐标图均归一化到0°响应水平。 涉及声音频率和波长的所有公式都使用以下关系式:c = f ×λ,其中c为343 m/s,即声音在20℃的空气中的传播速度。图1显示了这些条件下声波的频率与波长的关系。本应用笔记末尾的“设计参数计算公式”列出了本文所用阵列设计参数的计算公式。 宽边阵列 宽边麦克风阵列是指一系列麦克风的排列方向与要拾取的声波方向垂直(见图3)。图中,d是阵列中两个麦克风元件的间距。来自阵列宽边的声音通常就是要拾取的声音。
第三章波束形成算法 3.1 波束形成的发展 近年来,阵列信号处理在无线通信系统中得到了广泛应用。在蜂窝移动通信中,通信信道的需求急剧增长,使提高频谱复用技术显得日益重要。这就是通常说的空分多址(SDMA)。其中一个重要部分便是波束形成。 自适应波束形成(ADBF)亦称空域滤波,是阵列处理的一个主要方面,逐步成为阵列信号处理的标志之一,其实质是通过对各阵元加权进行空域滤波,来达到增强期望信号、抑制干扰的目的;而且可以根据信号环境的变化自适应地改变各阵元的加权因子。 自从1959年Van Atta提出自适应天线这个术语以来,自适应天线发展至今已经40多年了,自适应研究的重点一直是自适应波束形成算法,而且经过前人的努力,已经总结出许多好的算法比如SMI算法,ESB算法等等。但理论与实际总是有差距的,因为实际系统存在误差,这使得实际阵列流形与理想阵列会把期望信号当干扰进行一直,造成输出信号干扰噪声比下降和副瓣电平升高,当输入信号的信噪比(SNR)较大时,这种现象尤为明显。面对误差,传统自适应波束形成算法的效果很不理想,所以,研究实际环境下稳健的自适应波束形成算法具有重要的理论意义和军事,民用应用价值。 自适应波束形成常用协方差矩阵求逆(SMI)算法,该算法具有较快的信号干扰噪声比(SINR)意义下的收敛速度。从协方差矩阵分解的角度,自适应波束形成是协方差矩阵特征值分散,小特征值对应的特征矢量扰动,并参与自适应权值计算所致。针对这一问题,基于协方差矩阵非线性处理和对角线加载波束保形方法,对协方差矩阵非线性处理的加权因子的选取只能通过经验来取得;而在不同的干扰和噪声环境下对角线加载量的选取,至今没有很好的解决方法。 文献[3]提出了利用投影算子对阵列数据进行降维处理,在一定程度上降低了运算量,同时提高了自适应波束的稳健性,其投影算子是根据目标和干扰的粗略估计,以及不完全的阵列流形知识得到的。当相关矩阵中含有期望信号时,导致输出SINR下降,波形畸变较严重,另外,当存在系统误差和背景噪声为色噪声时,该方法虽然能够减小协方差中的扰动量,但副瓣电平还会出现一定程度的升高以及主瓣发生偏离现象。文献[4~5]提出的基于特征空间(ESB)的自适应波束形成算法,其权向量是在线性约束最小方差准则(LCMV)下的最优化权,向信号相关矩阵的
麦克风阵列信号处理的研究现状与应用 罗金玉等:麦克风阵列信号处理的研究现状与应用 麦克风阵列信号处理的研究现状与应用 (1.武警工程学院研究生大队,陕西西安710086;2.武警工程学院通信工程系,陕西西安710086) 摘要:在回顾麦克风阵列信号处理研究历程的基础上,对麦克风阵列信号处理的特点进行分析,总结了目前的研究热 点问题及现有算法并对各算法的优缺点进行比较,重点阐述了使用最为广泛的声源定位算法,最后介绍几个有价值的应用 领域,为进一步研究麦克风阵列信号处理奠定基础. 关键词:麦克风阵列信号处理;声源定位;TD0A;应用, 中图分类号:TN911-34文献标识码:A文章编号:1004—373X(2010)23—0080—05 StudyStatusandApplicationofMicrophoneArraySignalProcessing LUOJin-yu,LIUJian-ping,ZHANGYi—wen (1.Post—graduateManagingBrigade,EngineeringCollegeofArmedPoliceForce,Xi'an710086,Chi na; 2.DepartmentofC0mmunlcationEngineering,EngineeringCollegeofArmedPoliceForce, Xi'art710086.China) Abstract:Theeharacteristicofthemicrophonearraysignalprocessingisanalyzedbasedonth ereviewfortheprogressof microphonearraysignalprocessing.Thehotissuebeingstudiedrecentlyandtheexistingalgo rithmscorrespondingtoitare summerized.Themeritsanddemeritsofthealgorithmsarecompared.Thewidely-usedsoun dsourcelocalizationalgerithmis elaboratedemphatically.Somevaluableapplicationfieldsareintroduced. Keywords:microphonearraysignalprocessing;soundsourcelocalization;TDOA;applicati
麦克风波束成形的基本原理 2012/04/06 简介 所有MEMS麦克风都具有全向拾音响应,也就是能够均等地响应来自四面八方的声音。多个麦克风可以配置成阵列,形成定向响应或波束场型。经过设计,波束成形麦克风阵列可以对来自一个或多个特定方向的声音更敏感。 麦克风波束成形是一个丰富而复杂的课题。本应用笔记仅讨论基本概念和阵列配置,包括宽边求和阵列和差分端射阵列,内容涵盖设计考虑、空间和频率响应以及差分阵列配置的优缺点。 图1:空气中声波的频率与波长的关系 方向性和极坐标图 方向性描述麦克风或阵列的输出电平随消声空间中声源位置的改变而变化的模式。ADI公司的所有MEMS麦克风都是全向麦克风,即它们对来自所有方向的声音都同样敏感,与麦克风所处的方位无关。图2所示为全向麦克风响应的2轴极坐标图。无论麦克风的收音孔位于x-y平面、x-z平面还是y-z平面,此图看起来都相同。 图2:全向麦克风响应图本应用笔记中,阵列的"前方"称为轴上方向,指拾取目标音频的方向,在极坐标图上标为0°;"后方"为180°方向;"侧边"指前后方之间的空间,中心方向分别位于90°和270°。本应用笔记中的所有极坐标图均归一化到0°响应水平。 涉及声音频率和波长的所有公式都使用以下关系式:c = f × λ,其中c为343 m/s,即声音在20℃的空气中的传播速度。图1显示了这些条件下声波的频率与波长的关系。本应用笔记末尾的"设计参数计算公式"列出了本文所用阵列设计参数的计算公式。 宽边阵列 宽边麦克风阵列是指一系列麦克风的排列方向与要拾取的声波方向垂直(见图3)。图中,d是阵列中两个麦克风元件的间距。来自阵列宽边的声音通常就是要拾取的声音。