生物医学工程学杂志 J Biomed Eng 1998∶15(3)∶311~316 三维超声成像的发展现状及若干关键技术分析 郝晓辉 高上凯 高小榕 综述 杨福生 审校 (清华大学电机系,北京100084) 内容提要 介绍三维超声成像的意义,不同的实现方案,并详细剖析了三维超声成像中遇到的图像定位、三维准确重构、不规则采样平面处理以及三维超声图像的分割问题。讨论了现有的发展水平及未来的发展方向。 关键词 三维超声成像 分割 准确重构 Development Condition of Three Dimensional Ultrasonic Imaging and Analysis of Some Key Technologies Hao Xiaohui Gao Shangkai Gao Xiaorong Yang Fusheng (Depar tment of Electr ical Engine ering,Ts inghua Uni ver sity,Beij ing 100084) Abstract This paper introduces the value of three-dimensional ultrasonic imaging and it′s different realizing ap-proaches.It deliberately analyzes the key techniques used in three-dimensional ultrasonic imaging.These techniques include registration of two-dimensional i mages,accurate reconstruction of three-dimens ional volume,projection of ir-regularly sampled plane and segmentation of three-dimensional image.The development status and future trend are al-so given in this paper. Key words Three dimensional ultrasonic imaging Segmentation Accurate reconstruction 1 三维超声成像概述 1.1 回顾 三维超声成像的概念最初由Baun和Gree-wood[1]在1961年提出。他们在采集一系列平行的人体器官二维超声截面的基础上,用叠加的方式得到了器官的三维图像。在这之后,很多人进行了这方面的研究工作,试验了各种方法。诸如Dekker[2]在1974年采用的机械臂方法,1976年Moritz提出的回声定位方法,1979年首次被Raab应用的电磁定位方法[2],以及Duke大学Vonn Ra mm[7]等人研制的二维面阵探头体积射束方法等等。这些方法都着眼于获取进行三维重建的超声体积数据。成像方面, Dekker在1974年完成了首例心脏三维重建。1986年,Martin利用经食道超声探头(IEE)获得了静态的三维图像。1990年,Wollschlge用回拉式IEE探头重建了动态心脏三维超声图像。胎儿三维形体的重构[3]与血管的三维超声成也有许多人在研究,并取得了不少成果。 1.2 临床价值和意义 传统的B型超声成像系统所提供的是人体某一断面的二维图像,医生必须根据自己的经验对多幅二维图像在大脑中进行合成以理解其三维解剖结构。这一过程需要长时间的训练和相当的熟练程度,对医生提出了很高的要求,
本技术新型公开了一种三维超声成像装置,包括:图像采集模块、信号和影像处理模块、处理主机、控制装置和显示设备。所述图像采集模块用于对扫查区域进行扫查,采集超声波数据;所述信号和影像处理模块用于对接收到的超声波数据进行处理,发送到处理主机;所述控制装置用于控制图像采集模块进行扫查和运动;所述处理主机用于生成三维影像,输出图像至显示设备,发送控制指令至控制装置和图像采集模块。采用三维超声成像装置实时扫查,精度高,稳定性好;使用实时三维超声,可对疑似病灶空间分布扫查,利用扫查数据建立器官及疑似病灶的三维图像,并通过显示设备显示,降低医生手术操作的出错率,提高初次手术的成功率,减轻医生的手术疲劳度。 技术要求 1.一种三维超声成像装置,其特征在于,包括:图像采集模块、信号和影像处理模块、处理主机、控制装置和显示设备;所述处理主机通过信号和影像处理模块与图像采集模块 相连接,所述显示设备与处理主机相连接,所述控制装置分别与图像采集模块以及处理 主机相连接; 所述图像采集模块用于对扫查区域进行扫查,采集超声波数据,将所述超声波数据传输 至信号和影像处理模块; 所述信号和影像处理模块用于对接收到的超声波数据进行处理,发送到处理主机;
所述控制装置用于控制图像采集模块进行扫查和运动; 所述处理主机用于生成超声波图像和/或三维图像,向显示设备输出所述超声波图像和/或三维图像,发送控制指令至控制装置和图像采集模块; 所述显示设备用于显示超声波图像和三维图像。 2.如权利要求1所述的一种三维超声成像装置,其特征在于,所述图像采集模块包括第一超声探头、第二超声探头、第一位置传感器、第二位置传感器和超声支架; 所述第一超声探头和第一位置传感器相连接,所述第二超声探头和第二位置传感器相连接,所述第一超声探头和第二超声探头分别安装在超声支架上。 3.如权利要求2所述的一种三维超声成像装置,其特征在于,所述超声支架包括第一扫查通道杆和第二扫查通道杆,所述第一超声探头安装在第一扫查通道杆上,可沿第一扫查通道杆运动,以对扫查区域进行扫查,所述第二超声探头安装在第二扫查通道杆上,可沿第二扫查通道杆运动,以对扫查区域进行扫查,第一扫查通道杆和第二扫查通道杆之间的夹角角度可以调整。 4.如权利要求2所述的一种三维超声成像装置,其特征在于,所述超声支架的形状包括但不限于:平直支架和弧形支架。 5.如权利要求1所述的一种三维超声成像装置,其特征在于,所述信号和影像处理模块包括前置放大器,A/D转换器,时间增益补偿电路,动态滤波电路,D/A转换器。 6.如权利要求1所述的一种三维超声成像装置,其特征在于,所述显示设备包括多显示器屏结构。 7.如权利要求1所述的一种三维超声成像装置,其特征在于,所述控制装置包括但不限于高精密微型电机、电路板和线缆。 8.如权利要求1所述的一种三维超声成像装置,其特征在于,所述处理主机包括电脑主机和输入设备。
图像读入 ●从图形文件中读入图像 imread Syntax: A = imread(filename, fmt) filename:指定的灰度或彩色图像文件的完整路径和文件名。 fmt:指定图形文件的格式所对应的标准扩展名。如果imread没有找到filename所制定的文件,会尝试查找一个名为filename.fmt的文件。 A:包含图像矩阵的矩阵。对于灰度图像,它是一个M行N列的矩阵。如果文件包含 RGB真彩图像,则是m*n*3的矩阵。 ●对于索引图像,格式[X, map] = imread(filename, fmt) X:图像数据矩阵。 MAP:颜色索引表 图像的显示 ●imshow函数:显示工作区或图像文件中的图像 ●Syntax: imshow(I) %I是要现实的灰度图像矩阵 imshow(I,[low high],param1, val1, param2, val2,...) %I是要现实的灰度图像矩阵,指定要显示的灰度范围,后面的参数指定显示图像的特定参数 imshow(RGB) imshow(BW) imshow(X,map) %map颜色索引表 imshow(filename) himage = imshow(...) ●操作:读取并显示图像 I=imread('C:\Users\fanjinfei\Desktop\baby.bmp');%读取图像数据 imshow(I);%显示原图像 图像增强 一.图像的全局描述 直方图(Histogram):是一种对数据分布情况的图形表示,是一种二维统计图表,它的两个坐标分别是统计样本和该样本对应的某个属性的度量。 图像直方图(Image Histogram):是表示数字图像中亮度分布的直方图,用来描述图象灰度值,标绘了图像中每个亮度值的像素数。 灰度直方图:是灰度级的函数,它表示图像中具有某种灰度级的像素的个数,反映了图 像中某种灰度出现的频率。描述了一幅图像的灰度级统计信息。是一个二维图,横坐标为图像中各个像素点的灰度级别,纵坐标表示具有各个灰度级别的像素在图像中出现的次数或概率。 归一化直方图:直接反应不同灰度级出现的比率。纵坐标表示具有各个灰度级别的像
课程设计任务书 学生姓名:专业班级: 指导教师:工作单位: 题目: 基于MATLAB的图像处理的基本运算 初始条件: 要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) (1)能够对图像亮度和对比度变化调整,并比较结果 (2)编写程序通过最近邻插值和双线性插值等算法将用户所选取的图像区域进行放大和缩小整数倍的和旋转操作,并保存,比较几 种插值的效果 (3)图像直方图统计和直方图均衡,要求显示直方图统计,比较直方图均衡后的效果。 (4)对图像加入各种噪声,比较效果。 时间安排: 指导教师签名:年月日 系主任(或责任教师)签名:年月日 目录 摘要.......................................................................................................................... 错误!未定义书签。 1 MATLAB简介 ........................................................................................................ 错误!未定义书签。2图像选择及变换................................................................................................... 错误!未定义书签。 2.1 原始图像选择读取....................................................................................... 错误!未定义书签。 2.1.1 原理图的读入与基本变换 .................................................................... 错误!未定义书签。
【摘要】随着医学影像技术的发展,超声成像已经成为临床上应用最广泛的医学成像模式之一。近年来,随着电子技术、计算机技术的发展,超声成像设备在成像方法和技术等层面上不断得到改进,临床诊断能力也得到进一步提高。本文主要介绍三维超声成像的新技术及其临床应用。 【关键词】超声成像;临床应用 【中图分类号】r 445.1 【文献标识码】a 【文章编号】1004-7484(2012)12-0440-02 随着社会科学技术的进步与人们生活水平的提高,医学影像学作为医生诊断和治疗重要手段已成为医学技术中发展最快的领域之一,它使得临床医生对人体内部病变部位的观察更直接、更清晰,确诊率更高。而超声成像技术在医学成像领域中以其特有的优势发挥了巨大的作用,在临床上得到了广泛的应用。20世纪40年代初就已探索利用超声检查人体,50年代已研究、使用超声使器官构成超声层面图像,70年代初又发展了实时超声技术,可观察心脏及胎儿活动。三维超声成像技术与传统二维超声成像相比,具有明显的优势:首先三维超声成像技术能直接显示脏器的三维解剖结构;其次还可对三维成像的结果进行重新断层分层,能从传统成像方式无法实现的角度进行观察;再有还可对生理参数进行精确测量,对病变位置精确定位。因此,近几年来三维超声成像已经成为医学成像领域备受关注的方面。 1 三维超声的成像技术 可靠的数据提取是得到精确三维超声图像的前提。采用二维面阵超声探头,使超声束在三维扫查空间中进行摆动,即可直接得到三维体数据。但二维面阵换能器的制作工艺限制了阵元数,使得三维图像的分辨率受到了一定的限制。目前已有使用二维阵列的超声成像系统面世。目前三维超声数据的提取仍广泛采用一维阵列探头。用一维阵列探头提取三维超声数据,需要外加定位装置,如目前临床广泛采用的一体化探头。该探头是将一个一维超声探头和摆动机构封装在一起,操作者只要将该探头放在被探查部位,系统就能自动采集三维数据。还有一种新型探头专门用于解决定位问题。该探头有三个阵列,中间的主阵列用于超声成像,与主阵列垂直的两个侧阵列用于提取定位图像。由于探头移动的连续性,所以定位图像两两重叠部分很大,可以通过两侧的定位图像确定两次采样间的位移、旋转,从而确定图像的空间位置。此外,还有一些文献提供了通过相邻图像的相关和图像的斑点噪声统计规律来确定探头侧向位移的方法。 2 三维超声的临床应用 2.1 三维超声在空腔脏器中的应用 2.1.1 胃、肠道疾病嘱受检者适量饮水或灌肠后可建立良好的透声窗。清楚显示胃肠道隆起性病变与溃疡的大小、深度、边缘形态,观察恶性肿瘤的浸润深度、范围及与邻近组织、血管的立体位置关系,进行术前tnm分期,对协助临床制定相应的治疗方案,具有重要意义。3d-cde对溃疡出血和胃底静脉曲张的诊断,也可提供较大的帮助。 2.1.2 膀胱疾病膀胱充盈后可形成极佳的透声窗,三维超声与二维超声一样清晰显示病变的形态、大小、数目、内部回声,同时三维超声还能显示病变的整体、表面形态及肿瘤对膀胱壁的浸润情况,从而提高了其诊断的准确性,并有助于肿瘤术前方案的抉择。对慢性膀胱炎症、憩室、结石、凝血块等膀胱疾病的诊断,也显示出优越性。 2.2 在实质性脏器中的应用 肝脏疾病肝囊肿与肝脓肿二维超声诊断准确性较高,而肝癌与肝内其它性质占位性病变相互间的鉴别有时较为困难。三维超声可从不同方位观察肝表面和边缘轮廓,肿三维超声成像在临床上有广泛的应用前景。可用于精确测量和定位在产科临床上,三维超声成像可用于鉴别早期胎儿是否存在畸形以及检查各个孕期胎儿的生长发育情况;在心血管疾病诊断中,可用于多种心脏疾病以及血管内疾病的检查。随着实时三维超声成像(一般要求帧频必须大
基于M A T L A B图像处理报告一、设计题目 图片叠加。 二、设计要求 将一幅礼花图片和一幅夜景图片做叠加运算,使达到烟花夜景的美图效果。 三、设计方案 、设计思路 利用matlab强大的图像处理功能,通过编写程序,实现对两幅图片的像素进行线性运算,利用灰度变换的算法使图片达到预期的效果。 、软件介绍 MATLAB是matrix&laboratory两个词的组合,意为矩阵工厂(矩阵实验室)。是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。 MATLAB和Mathematica、Maple并称为三大数学软件。它在数学类科技应用软件中在数值计算方面首屈一指。MATLAB可以进行矩阵运算、绘制函数和数据、实现算法、创建用户界面、连接其他编程语言的程序等,主要应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。 MATLAB的基本数据单位是矩阵,它的指令表达式与数学、工程中常用的形式十分相似,故用MATLAB来解算问题要比用C,FORTRAN等语言完成相同的事情简捷得多,并且MATLAB 也吸收了像Maple等软件的优点,使MATLAB成为一个强大的数学软件。在新的版本中也加入了对C,FORTRAN,C++,JAVA的支持。可以直接调用,用户也可以将自己编写的实用程序导入到MATLAB函数库中方便自己以后调用,此外许多的MATLAB爱好者都编写了一些经典的程序,用户直接进行下载就可以用。
第一部分数字图像处理
实验一图像的点运算 实验1.1 直方图 一.实验目的 1.熟悉matlab图像处理工具箱及直方图函数的使用; 2.理解和掌握直方图原理和方法; 二.实验设备 1.PC机一台; 2.软件matlab。 三.程序设计 在matlab环境中,程序首先读取图像,然后调用直方图函数,设置相关参数,再输出处理后的图像。 I=imread('cameraman.tif');%读取图像 subplot(1,2,1),imshow(I) %输出图像 title('原始图像') %在原始图像中加标题 subplot(1,2,2),imhist(I) %输出原图直方图 title('原始图像直方图') %在原图直方图上加标题 四.实验步骤 1. 启动matlab 双击桌面matlab图标启动matlab环境; 2. 在matlab命令窗口中输入相应程序。书写程序时,首先读取图像,一般调用matlab自带的图像, 如:cameraman图像;再调用相应的直方图函数,设置参数;最后输出处理后的图像; 3.浏览源程序并理解含义; 4.运行,观察显示结果; 5.结束运行,退出; 五.实验结果 观察图像matlab环境下的直方图分布。 (a)原始图像 (b)原始图像直方图 六.实验报告要求 1、给出实验原理过程及实现代码; 2、输入一幅灰度图像,给出其灰度直方图结果,并进行灰度直方图分布原理分析。
实验1.2 灰度均衡 一.实验目的 1.熟悉matlab图像处理工具箱中灰度均衡函数的使用; 2.理解和掌握灰度均衡原理和实现方法; 二.实验设备 1.PC机一台; 2.软件matlab; 三.程序设计 在matlab环境中,程序首先读取图像,然后调用灰度均衡函数,设置相关参数,再输出处理后的图像。 I=imread('cameraman.tif');%读取图像 subplot(2,2,1),imshow(I) %输出图像 title('原始图像') %在原始图像中加标题 subplot(2,2,3),imhist(I) %输出原图直方图 title('原始图像直方图') %在原图直方图上加标题 a=histeq(I,256); %直方图均衡化,灰度级为256 subplot(2,2,2),imshow(a) %输出均衡化后图像 title('均衡化后图像') %在均衡化后图像中加标题 subplot(2,2,4),imhist(a) %输出均衡化后直方图 title('均衡化后图像直方图') %在均衡化后直方图上加标题 四.实验步骤 1. 启动matlab 双击桌面matlab图标启动matlab环境; 2. 在matlab命令窗口中输入相应程序。书写程序时,首先读取图像,一般调用matlab自带的图像, 如:cameraman图像;再调用相应的灰度均衡函数,设置参数;最后输出处理后的图像; 3.浏览源程序并理解含义; 4.运行,观察显示结果; 5.结束运行,退出; 五.实验结果 观察matlab环境下图像灰度均衡结果及直方图分布。 (a)原始图像 (b)均衡化后图像
程序实例 1旋转: x=imread('d:\MATLAB7\work\flower.jpg'); y=imrotate(x,200,'bilinear','crop'); subplot(1,2,1); imshow(x); subplot(1,2,2); imshow(y) 2.图像的rgb clear [x,map]=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shh1.jpg');y=x(90:95,90:95);imshow(y)R=x(90:95,90:95,1);G=x(90:95,90:95,2);B=x(90:95,90:95,3);R,G,B 3.加法运算clear I=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shh3.jpg');J=imnoise(I,'gaussian',0,0.02);%向图片加入高斯噪声subplot(1,2,1),imshow(I);%显示图片subplot(1,2,2),imshow(J);K=zeros(242,308);%产生全零的矩阵,大小与图片的大小一样for i=1:100%循环100加入噪声J=imnoise(I,'gaussian',0,0.02);J1=im2double(J);K=K+J1;end K=K/100; figure,imshow(K);save
4.减法 clear I=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shao.jpg'); J=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shao1.jpg'); K=imsubtract(I,J);%实现两幅图相减 K1=255-K;%将图片求反显示 figure;imshow(I); title('有噪声的图'); figure;imshow(J); title('原图'); figure;imshow(K1); title('提取的噪声'); save 5.图像的乘法 H=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shao.jpg'); I=immultiply(H,1.2);将此图片乘以1.2 J=immultiply(H,2); subplot(1,3,1),imshow(H); title('原图'); subplot(1,3,2),imshow(I); title('·放大1.2'); subplot(1,3,3),imshow(J); title('放大2倍'); 6除法运算 moon=imread('moon.tif'); I=double(moon); J=I*0.43+90; K=I*0.1+90; L=I*0.01+90; moon2=uint8(J); moon3=uint8(K); moon4=uint8(L); J=imdivide(moon,moon2); K=imdivide(moon,moon3); L=imdivide(moon,moon4); subplot(2,2,1),imshow(moon); subplot(2,2,2),imshow(J,[]); subplot(2,2,3),imshow(K,[]); subplot(2,2,4),imshow(L,[]);
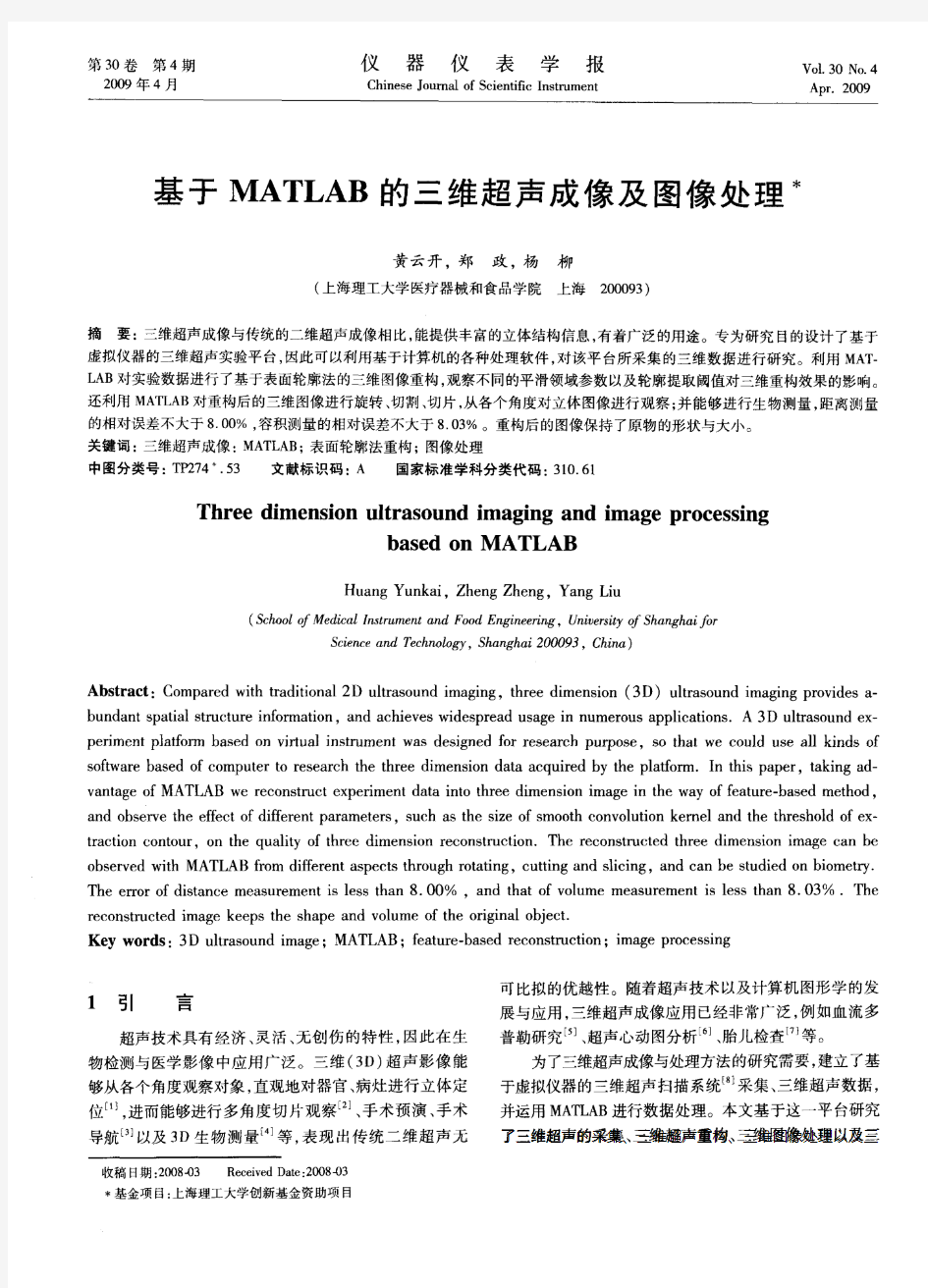
基于MATLAB的运动模糊图像处理 提醒: 我参考了文献里的书目和网上的一些代码而完成的,所以误差会比较大,目前对于从网上下载的模糊图片的处理效果很不好,这是我第一次上传自己完成的实验的文档,希望能帮到一些人吧。 研究目的 在交通系统、刑事取证中图像的关键信息至关重要,但是在交通、公安、银行、医学、工业监视、军事侦察和日常生活中常常由于摄像设备的光学系统的失真、调焦不准或相对运动等造成图像的模糊,使得信息的提取变得困难。但是相对于散焦模糊,运动模糊图像的复原在日常生活中更为普遍,比如高速运动的违规车辆的车牌辨识,快速运动的人群中识别出嫌疑人、公安刑事影像资料中提取证明或进行技术鉴定等等,这些日常生活中的重要应用都需要通过运动模糊图像复原技术来尽可能地去除失真,恢复图像的原来面目。因此对于运动模糊图像的复原技术研究更具有重要的现实意义。 图像复原原理 本文探讨了在无噪声的情况下任意方向的匀速直线运动模糊图像的复原问题,并在此基础上讨论了复原过程中对点扩散函数(PSF)的参数估计从而依据自动鉴别出的模糊方向和长度构造出最为近似的点扩散函数,构造相应的复原模型,实现运动模糊图像的复原;在模糊图像自动复原的基础上,根据恢复效果图的纹理特征和自动鉴别出的模糊长度和角度,人工调整模糊方向和长度参数,使得复原效果达到最佳。 实验过程 模糊方向的估计: 对图1(a)所示的原始图像‘车牌’图像做方向θ=30?,长度L=20像素的匀速直线运动模糊,得到退化图像如图1(b)
1(a) 1(b) j=imread('车牌1.jpg'); figure(1),imshow(j); title('原图像'); len=20; theta=30; psf=fspecial('motion',len,theta); j1=imfilter(j,psf,'circular','conv'); figure,imshow(j1); title('PSF 模糊图像'); 图1(c)和1(d)分别为原图像和模糊图像的二次傅里叶变化
rice=imread(‘rice.png’); % 读入图像 I=double(rice); % 数据类型转换 J=I*0.43+60; % 像素点算术运算 rice2=uint8(J) % 数据类型转换subplot(1,2,1),imshow(rice); % 原图绘制subplot(1,2,2),imshow(rice2); % 计算后图像绘制
X = uint8([ 255 10 75; 44 225 100]); Y = uint8([ 50 20 50; 50 50 50 ]); Z = imdivide(X,Y)
I = imread('rice.png'); % 读入图像background = imopen(I,strel('disk',15)); % 图像开运算Ip = imdivide(I,background); % 图像除法运算imshow(Ip,[]) % 显示运算后的图像
I = imread('rice.png'); % 读入图像 J = imdivide(I,2); % 图像除以一个常数subplot(1,2,1), imshow(I) % 显示原始图像subplot(1,2,2), imshow(J) % 显示运算后的图像
I = imread('cameraman.tif'); % 读入图像J = imlincomb(2,I); % 灰度值放大imshow(J) % 显示运算后的图像
I = imread('cameraman.tif'); % 读入图像 J = uint8(filter2(fspecial('gaussian'), I)); % 图像滤波 K = imlincomb(1,I,-1,J,128); % K(r,c) = I(r,c) - J(r,c) + 128 % 图像相减后加上一个常数figure, imshow(K) % 显示运算后的图像
目录 第一章绪论 (2) 1.1 研究背景 (2) 1.2 人脸图像识别的应用前景 (3) 1.3 本文研究的问题 (4) 1.4 识别系统构成 (4) 1.5 论文的内容及组织 (5) 第二章图像处理的Matlab实现 (6) 2.1 Matlab简介 (6) 2.2 数字图像处理及过程 (6) 2.2.1图像处理的基本操作 (6) 2.2.2图像类型的转换 (7) 2.2.3图像增强 (7) 2.2.4边缘检测 (8) 2.3图像处理功能的Matlab实现实例 (8) 2.4 本章小结 (11) 第三章人脸图像识别计算机系统 (11) 3.1 引言 (11) 3.2系统基本机构 (12) 3.3 人脸检测定位算法 (13) 3.4 人脸图像的预处理 (18) 3.4.1 仿真系统中实现的人脸图像预处理方法 (19) 第四章基于直方图的人脸识别实现 (21) 4.1识别理论 (21) 4.2 人脸识别的matlab实现 (21) 4.3 本章小结 (22) 第五章总结 (22) 致谢 (23) 参考文献 (24) 附录 (25)
第一章绪论 本章提出了本文的研究背景及应用前景。首先阐述了人脸图像识别意义;然后介绍了人脸图像识别研究中存在的问题;接着介绍了自动人脸识别系统的一般框架构成;最后简要地介绍了本文的主要工作和章节结构。 1.1 研究背景 自70年代以来.随着人工智能技术的兴起.以及人类视觉研究的进展.人们逐渐对人脸图像的机器识别投入很大的热情,并形成了一个人脸图像识别研究领域,.这一领域除了它的重大理论价值外,也极具实用价值。 在进行人工智能的研究中,人们一直想做的事情就是让机器具有像人类一样的思考能力,以及识别事物、处理事物的能力,因此从解剖学、心理学、行为感知学等各个角度来探求人类的思维机制、以及感知事物、处理事物的机制,并努力将这些机制用于实践,如各种智能机器人的研制。人脸图像的机器识别研究就是在这种背景下兴起的,因为人们发现许多对于人类而言可以轻易做到的事情,而让机器来实现却很难,如人脸图像的识别,语音识别,自然语言理解等。如果能够开发出具有像人类一样的机器识别机制,就能够逐步地了解人类是如何存储信息,并进行处理的,从而最终了解人类的思维机制。 同时,进行人脸图像识别研究也具有很大的使用价依。如同人的指纹一样,人脸也具有唯一性,也可用来鉴别一个人的身份。现在己有实用的计算机自动指纹识别系统面世,并在安检等部门得到应用,但还没有通用成熟的人脸自动识别系统出现。人脸图像的自动识别系统较之指纹识别系统、DNA鉴定等更具方便性,因为它取样方便,可以不接触目标就进行识别,从而开发研究的实际意义更大。并且与指纹图像不同的是,人脸图像受很多因素的干扰:人脸表情的多样性;以及外在的成像过程中的光照,图像尺寸,旋转,姿势变化等。使得同一个人,
基本数字图像处理算法的matlab实现 1.数字图像处理的简单介绍 所谓数字图像就是把传统图像的画面分割成为像素的小的离散点,各像素的灰度值也是用离散值来表示的。 数字图像处理是通过计算机对图像进行去除噪声、增强、复原、分割、提取特征等处理的方法和技术。 2.图像的显示与运算 2.1图像的显示 Matlab显示语句 imshow(I,[lowhigh])%图像正常显示 I为要显示的图像矩阵。,[lowhigh]为指定显示灰度图像的灰度范围。高于high的像素被显示成白色;低于low的像素被显示成黑色;介于high和low之间的像素被按比例拉伸后显示为各种等级的灰色。 subplot(m,n,p) 打开一个有m行n列图像位置的窗口,并将焦点位于第p个位置上。 2.2图像的运算 灰度化将彩色图像转化成为灰度图像的过程成为图像的灰度化处理。彩色图像中的每个像素的颜色有R、G、B三个分量决定,而每个分量有255中值可取,这样一个像素点可以有1600多万(255*255*255)的颜色的变化范围。而灰度图像是R、G、B三个分量相同的一种特殊的彩色图像,其一个像素点的变化范围为255种,所以在数字图像处理种一般先将各种格式的图像转变成灰度图像以使后续的图像的计算量变得少一些。灰度图像的描述与彩色图像一样仍然反映了整幅图像的整体和局部的色度和亮度等级的分布和特征。图像的灰度化处理可用两种方法来实现。
第一种方法使求出每个像素点的R、G、B三个分量的平均值,然后将这个平均值赋予给这个像素的三个分量。 第二种方法是根据YUV的颜色空间中,Y的分量的物理意义是点的亮度,由该值反映亮度等级,根据RGB和YUV颜色空间的变化关系可建立亮度Y与R、G、B三个颜色分量的对应:Y=0.3R+0.59G+0.11B,以这个亮度值表达图像的灰度值。 灰度是灰度级的函数,它表示图象中具有每种灰度级的象素的个数,反映图象中每种灰度出现的频率。 图像增强的目标是改进图片的质量,例如增加对比度,去掉模糊和噪声,修正几何畸变等;图像复原是在假定已知模糊或噪声的模型时,试图估计原图像的一种技术。 Matlab图像格式转换语句 rgb2gray(I) %从RGB图创建灰度图 imhist(I) %画灰度直方图 图像的线性变换 D B=f(D A)=f A*D A+f B Matlab源代码: I1=imread('F:\图片2.jpg'); subplot(2,2,1);imshow(I1);title('原图'); I2=rgb2gray(I1); %灰度化图像 subplot(2,2,2);imshow(I2);title('灰度化后图'); [M,N]=size(I2); subplot(2,2,3) [counts,x]=imhist(I2,60); %画灰度直方图 counts=counts/M/N; stem(x,counts);title('灰度直方图'); g=zeros(M,N);%图像增强
基于Matlab的遥感图像处理 测绘工程1161641014 鲍家顺 摘要文章运用Matlab软件对遥感影像的不足之处进行处理改善,详细介绍了处理方法和处理的原理,对处理结果进行了比对分析,并进行了边缘检测与特征提取,论证了处理方法的可行性。 关键词图像处理;matlab ;均衡化;规定化;色彩平衡;边缘检测;特征提取 在获取遥感图像过程中,由于多种因素的影响,会导致图像质量的退化,为了改善图像质量,突出遥感图像中的某些信息,提高图像的视觉效果,需要对图像进行各方面的处理,如分段线形拉伸,对数变换,直方图规定化、正态化,图像滤波,纹理分析及目标检测等。通过图像处理可以去除图像中的噪声,增强感兴趣的目标和周围背景图像间的反差,有选择地突出便于人或电脑分析的信息,抑制一些无用的信息,强调出图像的边缘,增强图像的识别方便性,从而进行边缘检测和特征提取。图像写出函数,显示图像函数有image ( ) 、inshow ( ) 等。[2 ]Matlab 图像处理工具箱处理工具提供了imhist () 函数来计算和显示图像的直方图, 提供了直方图均衡化的函数histeq() 、边缘检测函数edge ( ) 、腐蚀函数imerode () 、膨胀函数imdilate () 及二值图像转换函数im2bw () 等。文中实验数据采用的是桂林市区灰度遥感图像,宽度为1024 像素,高度为713 像素。 文件读入: 讲workspace切入到图片所在图层: Cd d:\ 读入图片: [x,cmap]=imread('m.PNG'); %将图片读入转换为矩阵 clf;imshow(x); %显示图片 原始图片
三维超声成像技术的基本原理及操作步骤230031 安徽合肥 解放军105医院 罗福成 1 基本原理 三维超声成像分为静态三维成像(static three2 dimensional imaging)和动态三维成像(dynamic three2dimensional imaging),动态三维成像由于参考时间因素(心动周期),用整体显像法重建感兴趣区域准实时活动的三维图像,则又称之为四维超声心动图。静态与动态三维超声成像重建的原理基本相同。 111 立体几何构成法 该法将人体脏器假设为多个不同形态的几何体组合,需要大量的几何原型,因而对于描述人体复杂结构的三维形态并不完全适合,现已很少应用。 112 表面轮廓提取法 是将三维超声空间中一系列坐标点相互连接,形成若干简单直线来描述脏器的轮廓的方法,曾用于心脏表面的三维重建。该技术所需计算机内存少,运动速度较快。缺点是:(1)需人工对脏器的组织结构勾边,既费时又受操作者主观因素的影响;(2)只能重建比较大的心脏结构(如左、右心腔),不能对心瓣膜和腱索等细小结构进行三维重建;(3)不具灰阶特征,难以显示解剖细节,故未被临床采用。 113 体元模型法(votel mode) 是目前最为理想的动态三维超声成像技术,可对结构的所有组织信息进行重建。在体元模型法中,三维物体被划分成依次排列的小立方体,一个小立方体就是一个体元。任一体元(v)可用中心坐标(x,y,z)确定,这里x,y, z分别被假定为区间中的整数。二维图像中最小单元为像素,三维图像中则为体素或体元,体元素可以认为是像素在三维空间的延伸。与平面概念不同,体元素空间模型表示的是容积概念,与每个体元相对应的数V(v)叫做“体元值”或“体元容积”,一定数目的体元按相应的空间位置排列即可构成三维立体图像。描述一个复杂的人体结构所需体元数目很大,而体元数目的多少(即体元素空间分辨率)决定模型的复杂程度。目前,国内外大多数使用Tom Tec Eeno view computer-work station来进行体元模型三维成像。 此外,随着高档超声仪器软件的不断开发,静态三维成像不经过工作站可直接启动设备软件包三维重建或三维电影回放来完成。 2 操作步骤 任何三维成像的研究均需通过原始图像采集、图像数据后处理、三维图像重建、三维图像显示和定量测量。扫描途径包括经食管、经胸和剑突下及腹壁等,每种方法各有利弊。 211 图像的采集 21111 机械驱动扫查 将探头固定在机械装置上,由计算机控制电动马达,带动探头做某种拟定形式的运动,常见的形式有三种:(1)平行扫查法(Parallel scanning):即探头沿直线做均匀连续的平行位移,获得一系列相互平行等距的二维切面图像。经食管或血管内的超声三维重建所采用的逐步后拉式采样亦属平行扫查。此方法图像易失真,目前已基本废弃。 (2)扇形扫描法(fan-like scanning):扫描平面的近场基本固定,远场沿z轴方向扇形移动,将采集的二维图像做数字存储,建立金字塔形数据库(Pyramid data-bank),而后插补三维像素(voxel),再根据需要任意切割,显示所欲观察的三维图像。此发现主要用于检查静态脏器,有的厂家将换能器封闭于特制的盒套内,操作比较方便。(3)旋转扫描法(rotat2 ing scanning):目前被广泛接受,能较理想地进行三维成像采集。以二维切面图像中声束方向的中心平分线为轴,使探头做180°旋转,获得围绕轴线360°范围内一系列相互均匀成角,且中心平分线相互重叠的二维切面图像,适用于心脏、前列腺、膀胱等。经食管的多平面探头或环形相控阵探头三维成像采样过程亦属此类。 由于机械驱动扫查中,探头具有规定的逻辑运动轨迹,因此,计算机对所获得的每一图像进行空间定位、数据处理及三维成像时速度快,图像重建准确可靠。缺点是采样过程繁琐、机械驱动支架体积大且沉重、与各类探头不易配接、扫查时有机械噪音、
成绩: 数字图像处理实验报告实验二:图像处理的matlab的实现 学号:0967118225 姓名:洪旭浩 同组人: 电脑编号: 实验时间:2010年6月4日星期一
数字图像处理实验报告 一、实验名称 图像处理的matlab 的实现 二、实验目的 1、了解Matlab 及其工具箱的基本使用方法 2、掌握使用Matlab 打开各种图像文件的方法 3、掌握使用Matlab 进行简单图像处理的方法 三、实验平台 Windows XP,Matlab 7.8.0(R2009a) 四、实验内容 一、直方图均衡化 直方图均衡化处理可将图像的灰度范围拉开,让灰度直方图在较大的动态范围内趋于一致。用图像),(y x f 的直方图代替灰度的分布密度函数)(f p f ,则直方图均衡化后的图像g 为: ?==f f du u p f T g 0)(][对于数字图像,设原图像的像素总数为N,灰度级的个数为L,第k 个灰度级出现的频数为k n 。若原图像),(y x f 在像素点),(y x 处的灰度为k r ,则直方图均衡化后的图像),(y x g 在),(y x 处的灰度k s 为: ∑===k l l k k N n r T s 0][MATLAB 图像处理工具箱提供了用于直方图均衡化的函数histep。histep 函数的语法格式为: J=histep(I,hgram) J=histep(I,n) [J,T]=histep(I,…) newmap=histep(X,map,hgram) newmap=histep(X,map) [newmap,T]=histep(X,…) 其中J=histep(I,hgram)将原始图像I 的直方图变成用户指定的向量hgram,hgram 中的各元素值域为[0,1]。 J=histep(I,n)指定直方图均衡化后的灰度级数n,默认值为64。 [J,T]=histep(I,…)返回能将图像I 的灰度直方图变换成图像J 的直方图的变换T。 newmap=histep(X ,map ,hgram)、newmap=histep(X ,map)和[newmap ,T]=histep(X,…)是针对索引色图像调色板的直方图均衡化。 1、使用以上语句,实现选定图像的直方图均衡化; 2、修改部分参数,观察不同参数下直方图均衡化的变化规律;
基于MATLAB的图像处理的基本运算
————————————————————————————————作者:————————————————————————————————日期:
课程设计任务书 学生姓名:专业班级: 指导教师:工作单位: 题目: 基于MATLAB的图像处理的基本运算 初始条件: 要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) (1)能够对图像亮度和对比度变化调整,并比较结果 (2)编写程序通过最近邻插值和双线性插值等算法将用户所选取的图像区域进行放大和缩小整数倍的和旋转操作,并保存, 比较几种插值的效果 (3)图像直方图统计和直方图均衡,要求显示直方图统计,比较直方图均衡后的效果。 (4)对图像加入各种噪声,比较效果。 时间安排: 指导教师签名:年月日 系主任(或责任教师)签名:年月日
目录 摘要..................................................................................................................................................... - 2 -1 MATLAB简介 ................................................................................................................................... - 2 -2图像选择及变换.............................................................................................................................. - 3 -2.1 原始图像选择读取.................................................................................................................. - 3 - 2.1.1 原理图的读入与基本变换 ............................................................................................... - 3 - 2.1.2 程序源代码及调试结果 ................................................................................................... - 4 - 2.2 转换图像为灰阶图像.............................................................................................................. - 5 - 3 图像处理及代码程序 ..................................................................................................................... - 6 -3.1 图像亮度对比度调整.............................................................................................................. - 6 - 3.1.1 函数说明及参数选择....................................................................................................... - 6 - 3.1.2 源程序及运行结果........................................................................................................... - 6 -3.2 图像放大和缩小...................................................................................................................... - 7 - 3.2.1 函数说明及参数选择....................................................................................................... - 7 - 3.2.2 源程序及运行结果........................................................................................................... - 7 -3.3 图像任意角度的旋转.............................................................................................................. - 8 - 3.3.1 函数说明及参数旋转....................................................................................................... - 8 - 3.3.2 源程序及运行结果........................................................................................................... - 9 -3.4图像直方图统计和均衡........................................................................................................... - 9 - 3.4.1 函数说明及参数选择....................................................................................................... - 9 - 3.4.2 源程序及运行结果......................................................................................................... - 10 -3.5 图像加入噪声........................................................................................................................ - 11 - 3.5.1 函数说明及参数选择..................................................................................................... - 11 - 3.5.2 源程序及运行结果......................................................................................................... - 12 - 4 图像处理结果比较分析 ............................................................................................................... - 14 -4.1 调整对比度和亮度后图像比较 ............................................................................................ - 14 -4.2 图像放大缩小及旋转后比较 ................................................................................................ - 14 -4.3 进行直方图均衡后图像比较 ................................................................................................ - 1 5 -4.4加入各种噪声后图像比较 ..................................................................................................... - 1 6 -5感悟体会小结................................................................................................................................ - 16 -参考文献........................................................................................................................................... - 1 7 -