ROS 多线路端口映射完美解决
(来自网管联盟)
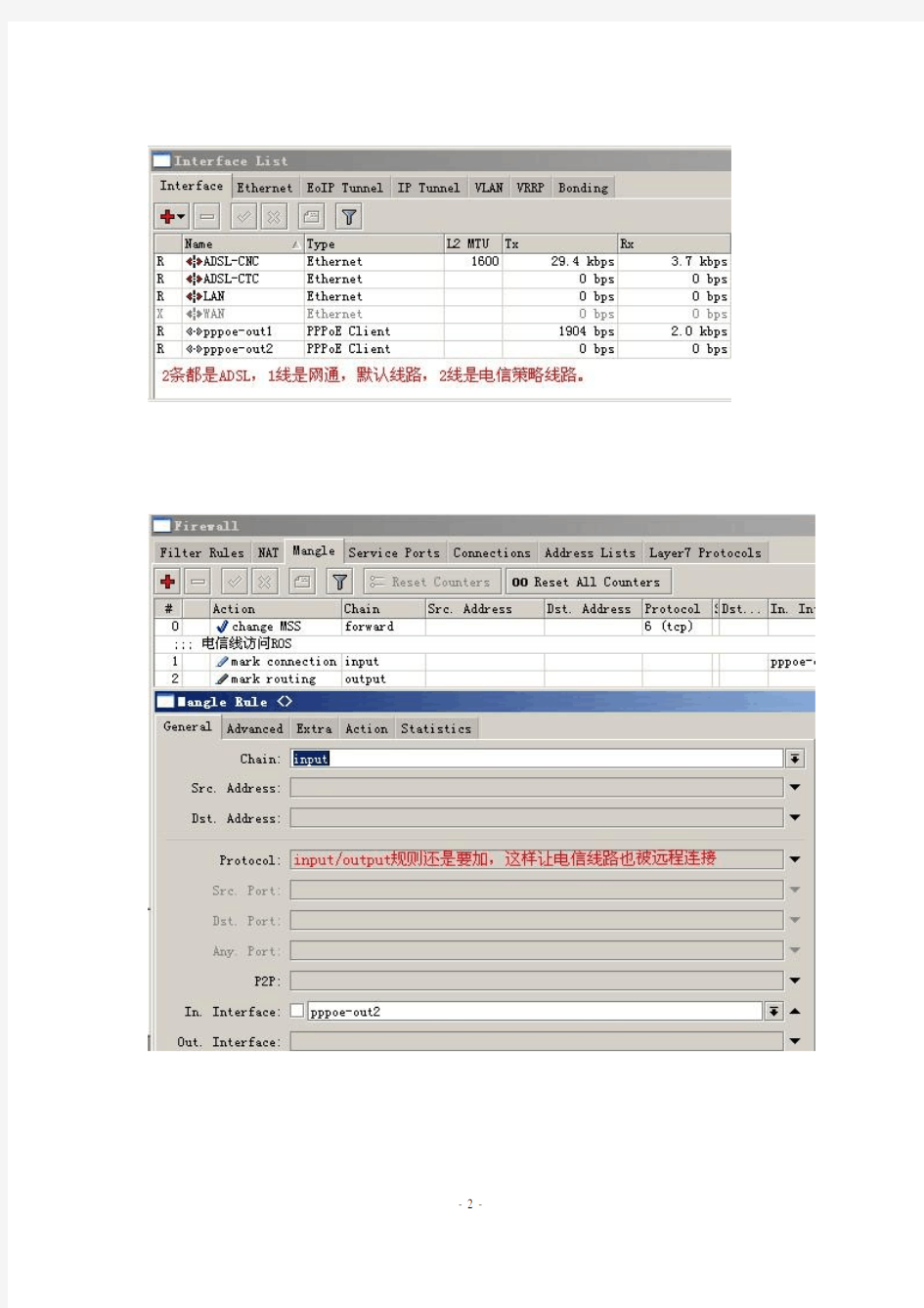
教程里的这个台ROS以前的主线路(main)是网通光纤,后来光纤撤了才上的网通ADSL,当时网通光纤为主线路的时候,做"端口映射"到内网服务器,电信线路也可以访问到其内网服务器的,但是回去的数据是走的网通光纤,而且不掉线,确实可以访问。相当于一半网通,一半电信。我一直很纳闷,反复测试确实是如此。直到后来主线路换成了网通ADSL,应该是网通ADSL不转发来自电信的源地址了,所以
通过电信线路无法访问内网服务器,今天做了下面这套设置,才可以正常访问了,这才真正是电信线进,电信线出。当然主线路访问一点问题没有的。这套设置与通过标记线路用WINBOX远程访问ROS是有区别的,那样光做好
INPUT/OUTPUT就行了,因为数据只在ROS上中转,并没进入内网。这样设置后就可以真正成为网通进网通出,电信进电信出,双线服务器了。
谢谢灰太狼帮忙测试,找出问题关键。
如果有其他更好的办法,或者我做得不对的地方,请大家不吝赐教,多跟帖,多交流。
高清视频语音教程大放送,请访问:https://www.doczj.com/doc/893359341.html, 一:安装 1、光盘版的 将iso文件刻录成可引导光盘。机器的硬盘设置为IDE0,即第一个IDE通道的主盘。 bios设置光盘引导系统,放入光盘启动机器得到如下 选择2:Install RouteOS 2.8.18后稍等,得到如下画面: 用方向键和空格选择你需要的模组功能后,按"A"全选,摁“i“键确定安装。会再次询问你继续?yes or no?,摁“Y“. 然后又问:do you want to keep lod configuraton?你需要保留旧的结构么?摁“N 然后开始自动的格式化磁盘、安装核心、安装模组。最后提示: Press ENTER to Reboot,按回车重新启动机器
重新启动后出现图1的那个引导画面(如果没有出现而直接进了登陆界面说明用硬盘引导了): 选择3: Crack RouteOS Floppy Disk,开始破解。
破解过程都是中文的。如果你的硬盘在IDE0:0的话破解是不会有问题的。否则可能出现系统文件被破坏、启动时0123456...循环出现等问题。 问你是否重启呢。把光盘拿出来后按下Y确定重启动 重新启动后开始登陆。初始用户名admin,初始密码为空。 咦?怎么还有提示注册的信息和Soft ID? 原来是还需要一个命令激活注册补丁才可以哦: 输入命令:/system license import file-name=key 或者缩写为/sy lic i f key 然后提示你是否重新启动。按Y重新启动 重新启动并用admin:““登陆后发现,提示注册的信息已经完全消失了,现在是正式版了
ROS 2.96 端口映射、IP显示及回流设置 1、什么是端口映射 这里说的端口映射是路由器上的端口映射。一般情况下,网络中路由器都有防火墙功能,互联网用户只能访问到你的路由器WAN口(接ADSL线口或是固定的外网IP地址),而访问不了局域内部服务器或工作站。要想让外面用户访问到局域网的电脑,那么就要在路由器上做一个转发设置,也就是端口映射设置,让用户的请求到了路由器后,能够转发到局域内部的机器上,例如游戏服务器或WEB 服务器。这就是端口映射。 例如,在局域网中建建立一个web服务器,IP地址为:192.168.1.3,端口为80,此时在局域内部,只要在浏览器输入http://192.168.1.3,就能打你web网站的内容,但如果要在因特网上访问此web服务器,打入http://192.168.1.3这个局域网内网IP,肯定是访问不了的。当需要在外网访问这台服务器时,就要就192.168.1.3这台机器的80端口通过路由器映射到外网。除了web服务外,其它的服务例如FTP、远程桌面等服务都可以将不同的端口映射出去,以便能在外网通过路由器来访问内网机器。一般的路由器都带有端口映射功能,以下对目前使较多的ROS软路由的端口映射作一说明,并提出解决外网IP显示及回流设置。 2、ROS 2.96 的端口映射的设置 进入winbox,点击IP→ Firewall→Nat打开防火墙设置界面。点击左上角红色的“+”号,添加一条dstnat 规则,其中dst.address 填写你要映射的外网IP,本例为218.87.96.xxx(此处请填入您的外网IP),然后选择protocol协议为6,即TCP协议,设置Dst. port(目标端口)为80。设置完成后如图1所示。
ROS及其常用命令 以下部分内容来自百科 ROS也可称为是Route Operation System.意为"软件路由器". 一、什么是软件路由器? 一般认为用普通PC安装一套专用的路由器程序组成的系统称为软件路由器,486电脑+免费的软件=专业的软件路由器。 二、软件路由器技术复杂吗? 不复杂,非常简单,会用普通操作PC就可以安装软件路由器。 三、常见的软件路由器有那些? 根据使用的操作不同可以分为基于windows平台和基于Linux/bsd平台开发的软件路由器,基于Windows平台的软件防火墙比较常见的有ISA Server、Winroute Firewall等,这些软件都是商业化的,通常根据授权用户数不同收费而不同,购买正版的软件防火墙的费用对许多中小型企业来说无疑是一笔不小的开支。有而基于Unix/Linux平台的软件防火墙大家一般接触较少,受益于开放源码运行,目前基于Unix/Linux平台的软件防火墙如雨后春笋般不断推出,这些软件防火墙大多是免费的,常见的有RouterOS、m0n0Wall、SmoothWall、Ipcop、CoyoteLinux等,这些系统共有的特点是一般对硬件要求较低,甚至只需要一台486电脑,一张软盘,两块网卡就可以安装出一台非常专业的软件防火墙,这对很多有淘汰下来的低档电脑的朋友来说,意味着拿一台淘汰的电脑,安装一套免费的防火墙软件,不花一分钱就DIY出一台专业的防火墙,而且这些系统自身也包含了NAT功能,同时可以实现宽带共享,这意味着这台免费的防火墙其实也是一台出色的宽带路由器,这是多么令人激动的事情。四、软件路由器功能如何? 不同的软件路由器功能不一样,绝大部分基于Linux/bsd的免费软件路由器功能并不比商业的差,而且比商业的功能还要强大。 五、软件路由器的性能和稳定性如何? 目前常见的硬件宽带路由器,绝大部分都是用软件来实现的,跟软件路由器是一样的,而且软件路由器一般硬件配置要比硬件的宽带路由器配置高,所以某些情况下速度比几千上万元的硬件路由器稳定还要快。至于软件路由器的稳定性,受益于稳定的Linux和BSD内核,软件路由器的稳定性非常好,我见过最长时间不用重启的软件路由器,已经有一年多了。 六、制作软件路由器需要什么配件? 一台486以上,8M内存以上的普通PC,再加两块网卡就可以了,有些软件路由器如CoyoteLinux只需一张软盘就可以了,对于网卡没有特殊的要求,常见的Rtl8139 和530tx,3COM905B-TX,Intel82559 服务器网卡等都可以,不过根据我们的经验,一台工作良好的软件路由器,网卡一定要好,所以我们会推荐你使用iNTEL或3COM品牌的网卡,特别是Intel82559效果非常不错。如果经验条件许可,购买一个电子硬盘或CF-IDE转接卡再配上CF存储卡,是不错的选择,这样做出来的软件路由器,可以跟硬件的路由器相比了。七、软件路由器会淘汰硬件路由器吗? 不会,但会软件路由器会逐渐占领更多的硬件路市场,软件路由器还不能淘汰硬件路由器,它们的市场定位不同,而且在高端只有硬件路由器才能胜任,但对于一般的应用象网吧、学校、机关等用软件路由器可以获得更高的经济效益。 八、到那里可以学会软件路由器技术?
网吧专用ros软路由教程(非常详细) 一:安装 1、光盘版的(转自雨纷飞大哥作品) 将iso文件刻录成可引导光盘。机器的硬盘设置为IDE0,即第一个IDE通道的主盘。 bios设置光盘引导系统,放入光盘启动机器得到如下 选择2:Install RouteOS 2.8.18后稍等,得到如下画面: 用方向键和空格选择你需要的模组功能后,按"A"全选,摁“i“键确定安装。会再次询问你继续?yes or no?,摁“Y“. 然后又问:do you want to keep lod configuraton?你需要保留旧的结构么?摁“N 然后开始自动的格式化磁盘、安装核心、安装模组。最后提示: Press ENTER to Reboot,按回车重新启动机器。
重新启动后出现图1的那个引导画面(如果没有出现而直接进了登陆界面说明用硬盘引导了): 选择3: Crack RouteOS Floppy Disk,开始破解。 破解过程都是中文的。如果你的硬盘在IDE0:0的话破解是不会有问题的。否则
可能出现系统文件被破坏、启动时0123456...循环出现等问题。 问你是否重启呢。把光盘拿出来后按下Y确定重启动 重新启动后开始登陆。初始用户名admin,初始密码为空。 咦?怎么还有提示注册的信息和Soft ID? 原来是还需要一个命令激活注册补丁才可以哦: 输入命令:/system license import file-name=key 或者缩写为/sy lic i f key 然后提示你是否重新启动。按Y重新启动 重新启动并用admin:““登陆后发现,提示注册的信息已经完全消失了,现在是正式版了
MikroTik RouterOS v2.9 基本操作说明 CDNAT https://www.doczj.com/doc/893359341.html, RouterOS应用说明 主要特征 TCP/IP协议组:
?Firewall和NAT–包状态过滤;P2P协议过滤;源和目标NAT;对源MAC、IP地址、端口、IP协议、协议(ICMP、TCP、MSS等)、接口、对内部的数据包和连接作标记、ToS 字节、内容过滤、顺序优先与数据频繁和时间控制、包长度控制... ?路由–静态路由;多线路平衡路由;基于策略的路由(在防火墙中分类); RIP v1 / v2, OSPF v2, BGP v4 ?数据流控制–能对每个IP、协议、子网、端口、防火墙标记做流量控制;支持PCQ, RED, SFQ, FIFO对列; Peer-to-Peer协议限制 ?HotSpot– HotSpot认证网关支持RADIUS验证和记录;用户可用即插即用访问网络;流量控制功能;具备防火墙功能;实时信息状态显示;自定义HTML登录页;支持iPass;支持SSL安全验证;支持广告功能。 ?点对点隧道协议–支持PPTP, PPPoE和L2TP访问控制和客户端;支持PAP, CHAP, MSCHAPv1和MSCHAPv2 验证协议;支持RADIUS验证和记录;MPPE加密;PPPoE 压缩;数据流控制;具备防火墙功能;支持PPPoE按需拨号。 ?简单隧道– IPIP隧道、EoIP隧道(Ethernet over IP) ?IPsec–支持IP安全加密AH和ESP协议; ?Proxy–支持FTP和HTTP缓存服务器;支持HTTPS代理;支持透明代理;支持SOCKS协议;DNS static entries; 支持独立的缓存驱动器;访问控制列表;支持父系代理。 ?DHCP– DHCP服务器;DHCP接力;DHCP客户端; 多DHCP网络;静态和动态DHCP租约;支持RADIUS。 ?VRRP–高效率的VRRP协议(虚拟路由冗余协议) ?UPnP–支持即插即用 ?NTP–网络对时协议服务器和客户端;同步GPS系统 ?Monitoring/Accounting– IP传输日志记录;防火墙活动记录;静态HTTP图形资源管理。 ?SNMP–只读访问 ?M3P– MikroTik分包协议,支持无线连接和以太网。 ?MNDP– MikroTik邻近探测协议;同样支持思科的CDP。 ?Tools - ping; traceroute; bandwidth test; ping flood; telnet; SSH; packet sniffer; DDNS。 二层链接 ?Wireless - IEEE802.11a/b/g wireless client和访问节点(AP);Nsetreme和Nstreme2 协议;无线分布系统(WDS);虚拟AP功能;40和104 bit WEP; WPA pre-shared key加密; 访问控制列表;RADIUS服务器验证;漫游功能(wireless客 户端); 接入点桥接功能。 ?Bridge–支持生成树协议(STP);多桥接口;桥防火墙;MAC NAT功能。 ?VLAN - IEEE802.1q Virtual LAN,支持以太网和无线连接;多VLAN支持;VLAN 桥接。 ?Synchronous - V.35, V.24, E1/T1, X.21, DS3 (T3)媒体类型;sync-PPP, Cisco HDLC, 帧中继协议; ANSI-617d (ANDI or annex D)和Q933a (CCITT or annex A) 帧中继LMI类型 ?Asynchronous–串型PPP dial-in / dial-out;PAP, CHAP, MSCHAPv1和MSCHAPv2 验证协议;RADIUS验证和记录;支持串口;modem池支持128个端 口。 ?ISDN - ISDN dial-in / dial-out; PAP, CHAP, MSCHAPv1和MSCHAPv2 验证协议;RADIUS验证和记录;Cisco HDLC, x75i, x75ui, x75bui 队列支持。 硬件要求 ?CPU和主板–核心频率在100MHz或更高的单核心i386处理器,以及与兼容的主板。 ?RAM–最小32 MiB, 最大1 GiB; 推荐64 MiB或更高。
软路由设置
ROS 软路由设置
提示:此软件为顶级软路由软件!赶快用吧!记的要《全盘 ghost!不是分区 ghost 恢复 哦!是全盘恢复! 》 不要怀疑软路由的性能,也不用担心所谓的耗电多少。所谓的软路由耗电大,只不过是 商家搞的噱头而已。软路由完全不需要显示器、键盘鼠标。甚至,可以在 BIOS 里设置系统 启动完即关闭硬盘。 至于主板, 带集成显卡的即可。 这样的配置下来, 软路由功率仅仅 20-30 瓦左右。 软路由具有极高的性能和广泛的应用。可轻易实现双线策略、arp 绑定、限速、封杀 BT 以及网吧借线、vpn 等。尤其对有连锁网吧经营者,利用 IPIP 协议,不仅可实现借线目的, 还可象本地操作一样远程管理其他网吧。这些,一般硬路由根本无法与之比拟。 我以前对硬路由一直情有独钟,换上软路由后,对它的强大功能赞叹不已。现在利用它的内 置 VPN 技术轻易做出电信网通加速软件-南北网桥(https://www.doczj.com/doc/893359341.html,) ,又给两家网吧试做了 IPIP 借线,在这种比较大的压力下,软路由依然运行良好。 我软路由配置:730 主板,128M 内存,早期的 AMD800 毒龙 CPU,集成显卡和一个 8139 网卡,外加两块 3C905 网卡 抓图状态:vpn 在线拨号,IPIP 二家网吧,总用户数量在 500 多。 ROS 软路由基本设置非常简单,如果只做路由转发,以下几步数分钟即可高定: 硬件准备: A. B. C. 首先下载软路由的 ghost 硬盘版,本站已经在压缩包总提供! 释放后,ghost 至一个小硬盘(20G 以下) ,注意,是整盘 GHOST 而不是分区。 将该硬盘挂在要做路由电脑上,注意必须接在第一个 IDE 并且是主硬盘接口。插上一 张网卡,这是接内网的 LAN。开机。 软件设置: 1. 2. 3. 开机,出现登陆提示。用户:admin 密码:空 输入 setup 再按两次 A 在 ether1 后面输入你的内网 IP,如:192.168.0.254/24 (这里/24 是 24 位掩码与 255.255.255.0 一样) 4. 输入完 ip 后, 按两次 x 退出, 现在可以可以 ping 通 192.168.0.254 了, 也可用 winbox
第 1 页 共 27 页
正文开始,脚本在下面。 我做完ROS加VLAN ADSL多线PCC叠加设置设置后不久,网站开发小组的项目经理就找到我向我提出了需求,因为现在他们的测试服务器是放在我们办公室内网的,我们公司其它部门和其它分公司和我们办公室不是一个局域网,网站开发小组的项目经理想让我们公司的所有同事都能访问到测试服务器做用户体验度测试,想让我帮助实现,当时我一口答应下来,也觉得这是个很简单的事情,但是事情往往出人意料。 我一开始的思路是这样的,第一步就是在IP->firewall-> nat下面做基于目标的伪装,也就是映射,第二步就是要做回流让内网的客户端也能通过公网IP 访问到服务器,第三步就是做动态映射的计划任务,定时更新第一步里面的目标地址即ADSL的地址,最后一步就要用到DDNS做一个二级域名的动态解析方便同事记忆和输入。做完以后发现需求基本满足,就是内网客户端不能通过域名访问到服务器,只能通过内网IP访问,为了精益求精,继续研究,baidu和google 上搜索了无数方法均无效,后来在一个论坛里面看到一个高人的回复内容给了我启发,于是再一次尝试配置居然成功了。不敢独享,现在将思路和脚本整理分享给更多需要的人。 首先我来分析下出现上述问题的原因,因为我们这里的环境是多线叠加的,我们的每个连接在进行路由之前都会对连接进行标记并路由,不同的标记有可能走不同的路由导致数据没办法顺利到达服务器,其内部数据的具体流向以及转换我也不是很清楚,如有高手路过请不吝赐教。下面进入正题,其实很简单,我们只要在标记里面把目标地址为我们的外网接口地址的数据直接通过就可以解决这个问题了,有几条线就做几个标记,最后要添加计划任务更新标记里的目标地址为对应的外网接口地址,所以加上这最后两步一共是六步,下面就放出每一步的脚本(我的环境是双线叠加的,所以以下脚本都是适合双线的,改成多线的也很容易) 1、做映射,这里以把内网的8890端口映射成9000端口为例。comment内容可以先运行脚本以后在winbox里面改,下同
ros 常用命令 关机:system—shutdown 重启:/sy reboot /ip add pri 查看IP配置 /sy backup save name=保存的文件名 /int pri 查看网卡状态 import *.rsc 防火墙导入命令(前提是*.rsc已经放在了ROS的FTP中) /ip firewall export file=*.rsc 备份防火墙 /ip fir con print 用户:lish ps:love /ip address add address 10.0.0.1/24 interface ether1 /ip address add address 10.0.0.1 netmask 255.255.255.0 interface ether1 /set r 恢复路由初始 /sy reboot 重启路由 /sy showdown 关机 /sy ide set name=机器名设置机器名 /export 查看配置 /ip export 查看IP配置 /sy backup 回车 save name=你要设置文件名备份路由 LOAD NAME=你要设置文件名恢复备份 /interface print 查看网卡状态 0 X ether1 ether 1500 这个是网卡没有开启 0 R ether1 ether 1500 这个是正常状态 /int en 0 激活0网卡 /int di 0 禁掉0网卡 /ip fir con print 查看当前所有网络边接 /ip service set www port=81 改变www服务端口为81 /ip hotspot user add name=user1 password=1 增加用户 关于如何绑定MAC和IP 来防止IP冲突 ROS和其他代理服务器一样,有个弱点,如果内网有人把客户机IP改成和网关相同的IP(如 192.168.0.1这样的),那么过了一会,ROS的就失去了代理作用,整个网吧就会吊线。用超级管理员账号登录 ,IP-----ARP,这样可以看到一行行的 IP和MAC地址,这些就是内网有网络活动的计算机。选中一个,双击,选COPY----点OK,依次进行,全部绑定后,来到WINBOX的INTERFACE选项,双击内网网卡,在ARP选项里,选择“replay-only”至此,通过ROS绑定IP完毕,这样下面客户机只要一改IP,那么它就无法和网关进行通讯了,当然也无法使主机吊线了 RO防syn ip-firewall-connections Tracking:TCP Syn Sent Timeout:50 TCP syn received timeout:30 RO端口的屏蔽 ip-firewall-Filer Rules里面选择 forward的意思代表包的转发firewall rule-General Dst.Address:要屏蔽的端口 Protocol:tcp Action:drop(丢弃) RO限速 Queues-Simple Queues name:可以任意 Dst. Address:内网IP/32 Limit At (tx/rx) :最小传输 Max Limit (tx/rx) :最大传输 RO映射 ip-firewall-Destination NAT General-In. Interface all(如果你是拨号的就选择pppoe的、固定IP选择all即可) Dst. Address:外网IP/32 Dst. Port:要映射的端口 Protocol:tcp(如果映射反恐的就用udp) Action action:nat TO Dst.Addresses:你的内网IP TO Dst.Ports:要映射的端口
一:安装 1、光盘版的(转自雨纷飞大哥作品) 将iso文件刻录成可引导光盘。机器的硬盘设置为IDE0,即第一个IDE通道的主盘。 bios设置光盘引导系统,放入光盘启动机器得到如下 选择 2:Install RouteOS 2.8.18后稍等,得到如下画面: 用方向键和空格选择你需要的模组功能后,按"A"全选,摁“i“键确定安装。会再次询问你继续?yes or no?,摁“Y“. 然后又问:do you want to keep lod configuraton?你需要保留旧的结构么?摁“N 然后开始自动的格式化磁盘、安装核心、安装模组。最后提示: Press ENTER to Reboot,按回车重新启动机器。
重新启动后出现图1的那个引导画面(如果没有出现而直接进了登陆界面说明用硬盘引导了): 选择3: Crack RouteOS Floppy Disk,开始破解。
破解过程都是中文的。如果你的硬盘在IDE0:0的话破解是不会有问题的。否则可能出现系统文件被破坏、启动时0123456...循环出现等问题。 问你是否重启呢。把光盘拿出来后按下Y确定重启动 重新启动后开始登陆。初始用户名admin,初始密码为空。 咦?怎么还有提示注册的信息和Soft ID? 原来是还需要一个命令激活注册补丁才可以哦: 输入命令:/system license import file-name=key 或者缩写为/sy lic i f key 然后提示你是否重新启动。按Y重新启动 重新启动并用admin:““登陆后发现,提示注册的信息已经完全消失了,现在是正式版了
ros端口映射和回流详解 1、什么是端口映射 这里说的端口映射是路由器上的端口映射。一般情况下,网络中路由器都有防火墙功能,互联网用户只能访问到你的路由器WAN口(接ADSL线口或是固定的外网IP地址),而访问不了局域内部服务器或工作站。要想让外面用户访问到局域网的电脑,那么就要在路由器上做一个转发设置,也就是端口映射设置,让用户的请求到了路由器后,能够转发到局域内部的机器上,例如游戏服务器或WEB服务器。这就是端口映射。 在局域网中建建立一个CS服务器,IP地址为:192.168.0.235,端口为27015,此时在局域内部,如果要在外网上访问服务器,就要把192.168.0.235这台机器的27015端口通过路由器映射到外网。除了CS服务外,其它的服务例如FTP、远程桌面等服务都可以将不同的端口映射出去,以便能在外网通过路由器来访问内网机器。一般的路由器都带有端口映射功能,以下对目前使较多的ROS软路由的端口映射作一说明,并提出解决外网IP显示及回流设置。 2、ROS 2.96 的端口映射的设置 进入winbox,点击IP→ Firewall→Nat打开防火墙设置界面。点击左上角红色的“+”号,添加一条dstnat规则,其中dst.address 填写你要映射的外网IP,本例为218.87.96.xxx(此处请填入您的外网IP),然后选择protocol协议为6,即TCP协议,设置Dst. port(目标端口)为80。设置完成后如图1所示。 单击“Action”选项卡,在Action框中,选择“dst-nat” ,在“To.Address”框中填写内网提供服务的IP地址,本例为192.168.1.3,在“To.Port”填写内网提供服务的IP端口,这样基本映射就完成了,如图2所示,此时可以在外网中输入你的外网IP,即可看到内网192.168.1.3WEB服务器
ROS 常用命令大全 OUTEROS常用命令 /sy reset 恢复路由原始状态 /sy reboot 重启路由 /sy showdown 关机 /sy ide set name=机器名设置机器名 /export 查看配置 /ip export 查看IP配置 /sy backup 回车 save name=你要设置文件名备份路由 LOAD NAME=你要设置文件名恢复备份 /interface print 查看网卡状态 0 X ether1 ether 1500 这个是网卡没有开启 0 R ether1 ether 1500 这个是正常状态 /int en 0 激活0网卡 /int di 0 禁掉0网卡 /ip fir con print 查看当前所有网络边接 /ip service set www port=81 改变www服务端口为81 /ip hotspot user add name=user1 password=1 增加用户
ROS基本的设置向导 基本的设置向导 文档版本 0.3.0 (Fri Mar 05 07:52:32 GMT 2004) 这个文档只试用于 MikroTik RouterOS V2.8 目录 目录 概要 相关的文档 描述 建立 MikroTik RouterOS? 描述 注意 记录在 MikroTik 路由器 描述 添加软件包 描述 终端控制台导航 描述 注意 基本的配置作业 描述
注意 基本的实例 实例 观察路由 增加缺省的路由 测试网络的连通性 高级的配置作业 描述 Application Example with Masquerading 带宽管理实例 NAT实例 总的说明 概要 MikroTik RouterOS? 是独立于linux操作系统的IA-32 路由器和瘦路由器. 它不要求添加任何额外的部件又没有软件需求. 它被设计成简单又易于使用的强大的接口允许网路管理员配置网咯结构和功能, 这要求你任何时间任何地点的学习下面这参考手册. 有关的文档 ?包管理 ? 设备驱动列表 ? 许可证管理 ? Ping
软路由图文设置
ROS 软路由设置
提示:此软件为顶级软路由软件!赶快用吧!记的要《全盘 ghost!不是分区 ghost 恢复 哦!是全盘恢复! 》 不要怀疑软路由的性能, 也不用担心所谓的耗电多少。 软路由具有极高的性能和广泛的 应用。可轻易实现双线策略、arp 绑定、限速、封杀 BT 以及网吧借线、vpn 等。尤其对有 连锁网吧经营者,利用 IPIP 协议,不仅可实现借线目的,还可象本地操作一样远程管理其 他网吧。这些,一般硬路由根本无法与之比拟。 我以前对硬路由一直情有独钟,换上软路由后,对它的强大功能赞叹不已。现在利用它的内 置 VPN 技术轻易做出电信网通加速软件-南北网桥(https://www.doczj.com/doc/893359341.html,) ,又给两家网吧试做了 IPIP 借线,在这种比较大的压力下,软路由依然运行良好。 ROS 软路由基本设置非常简单,如果只做路由转发,以下几步数分钟即可高定: 硬件准备: A. B. C. 首先下载软路由的 ghost 硬盘版,本站已经在压缩包总提供! 释放后,ghost 至一个小硬盘(20G 以下) ,注意,是整盘 GHOST 而不是分区。 将该硬盘挂在要做路由电脑上,注意必须接在第一个 IDE 并且是主硬盘接口。插上一 张网卡,这是接内网的 LAN。开机。 软件设置: 1. 2. 3. 开机,出现登陆提示。用户:admin 密码:空 输入 setup 再按两次 A 在 ether1 后面输入你的内网 IP,如:192.168.0.254/24 (这里/24 是 24 位掩码与 255.255.255.0 一样) 4. 输入完 ip 后, 按两次 x 退出, 现在可以可以 ping 通 192.168.0.254 了, 也可用 winbox 在图形界面下访问路由了。 5. 关机,插上另一张网卡,这个是接外网的,即 WAN,现在可以去掉软路由电脑的 显示器和键盘了。 6. 7. 开机,运行 winbox 以 admin 身份登陆 添加外网网卡。在 ip---address 里按+,address 输入你的外网 ip 和掩码位,比如 218.56.37.11/29。network 和 BROADCAST 不填,INTERFACE 里选择 ethr2 8. 增加外网网关。ip-routes 按+,Destination 用默认的 0.0.0.0/0 ,Gateway 输入外网网
第 1 页 共 27 页
教程:ROS如何设置ADSL的端口映射(端口转发) ADSL的外网IP是不固定的,每次重新拨号都会被重新分配个IP,做端口映射的时候就不太好弄,网上找了很久也没有能用的方案,研究了1天,终于搞定了,分享出来可以给需要的人参考。 1. 打开Winbox->New Terminal,执行如下命令:/ ip firewall nat add action=masquerade chain=srcnat disabled=no out-interface=pppoe-out1 / ip firewall nat add action=dst-nat chain=dstnat comment=web80 disabled=no dst-address=外网IP dst-address-type=local dst-port=80 protocol=tcp to-addresses=192.168.0.8(DNS服务器IP)to-ports=802. 复制如下Script,名为ADSL_YingShe::global newip [ /ip address get address ] :set newip [:pick $newip 0 [:find $newip "/"]] :global oldip dst-address] :if ($newip != $oldip) do={ :log info dst-address=$newip] :log info "ADSL映射修改完毕"} 我这里设置了3个端口 3. 最后设置事务 System->Scheduler,Interval设置脚本执行时间间隔,我设置为2分钟。On Event里填写::execute ADSL_YingShe 至此设置完成,应该就可以用了,下面简单说一下脚本的作用: 1. 搜索PPPOE端口的外网IP地址 2. 搜索名为: "web80",端口为: 80的NAT 规则外网IP地址与PPPOE端口IP作比较。 3. 比较如果不一致,说明外网IP变了,则把NAT 规则外网IP地址设置为PPPOE端口实际外网IP 4. 2分钟(可设置)查询一次,如果间隔设置太大,IP更新速度就慢,设置太小,路由器的负荷就会大。所以应根据需要合理设置。 真是死脑筋,固定IP会,不固定的就不会了? 不固定的外网IP不写就是了 进入winbox 打开终端(New Terminal) / ip firewall nat add chain=dstnat protocol=tcp
ROS多线叠加端口映射及回流设置 2012年04月14日?RouterOS?评论数 2?被围观 8,003 views+ 我做完ROS加VLAN ADSL多线PCC叠加设置设置后不久,网站开发小组的项目经理就找到我向我提出了需求,因为现在他们的测试服务器是放在我们办公室内网的,我们公司其它部门和其它分公司和我们办公室不是一个局域网,网站开发小组的项目经理想让我们公司的所有同事都能访问到测试服务器做用户体验度测试,想让我帮助实现,当时我一口答应下来,也觉得这是个很简单的事情,但是事情往往出人意料。 我一开始的思路是这样的,第一步就是在IP->firewall-> nat下面做基于目标的伪装,也就是映射,第二步就是要做回流让内网的客户端也能通过公网IP 访问到服务器,第三步就是做动态映射的计划任务,定时更新第一步里面的目标地址即ADSL的地址,最后一步就要用到DDNS做一个二级域名的动态解析方便同事记忆和输入。做完以后发现需求基本满足,就是内网客户端不能通过域名访问到服务器,只能通过内网IP访问,为了精益求精,继续研究,baidu和google 上搜索了无数方法均无效,后来在一个论坛里面看到一个高人的回复内容给了我启发,于是再一次尝试配置居然成功了。不敢独享,现在将思路和脚本整理分享给更多需要的人。 首先我来分析下出现上述问题的原因,因为我们这里的环境是多线叠加的,我们的每个连接在进行路由之前都会对连接进行标记并路由,不同的标记有可能走不同的路由导致数据没办法顺利到达服务器,其内部数据的具体流向以及转换我也不是很清楚,如有高手路过请不吝赐教。下面进入正题,其实很简单,我们只要在标记里面把目标地址为我们的外网接口地址的数据直接通过就可以解决这个问题了,有几条线就做几个标记,最后要添加计划任务更新标记里的目标地址为对应的外网接口地址,所以加上这最后两步一共是六步,下面就放出每一步的脚本(我的环境是双线叠加的,所以以下脚本都是适合双线的,改成多线的也很容易) 1、做映射,这里以把内网的8890端口映射成9000端口为例。comment内容可以先运行脚本以后在winbox里面改,下同
routerOS常用命令 /sy reset恢复路由原始状态 /sy reboot重启路由 /sy shutdown关机 /sy ide set name=机器名设置机器名 /export查看配置 /ip export查看IP配置 /sy backup回车 save name=你要设置文件名备份路由 LOAD NAME=你要设置文件名恢复备份 /interface print查看网卡状态 0 X ether1 ether 1500这个是网卡没有开启 0 R ether1 ether 1500这个是正常状态 /int en 0激活0网卡 /int di 0禁掉0网卡 /ip fir con print查看当前所有网络边接 /ip hotspot user add name=user1 password=1增加用户 软件的xx. 但重新引导后,这软件许可证允许你使用此软件所有功能只有24小时.如果你在使用期间没有输入新的软件许可证,它将停止工作,直到你重新输入软件许可证.
RouterOS 许可证是以软件IDs认证为基础的.为了得到许可证,你必须知道软件的ID号.它是软件在安装期间被显示的, 你也可以通过系统控制台或Winbox.去取得软件的ID . 从控制台的命令是: /system license print (注意t这个ID是记录到你的路由器中;通过这个缺省的用户: admin没有密码(在passwrod提示符下键入[Enter]键. 你能获得一个ID: 看到这部分一旦你有个ID,可以在以下部分配置这台路由器你可以有一个和存在我们的服务器帐户上一样的帐号.如果你在 1.键入软件的ID进入帐号服务器,并通过e-mail取得软件ID.你可以上传文件到你路由器的FTP服务器,或用Winbox 2.你可以用一个编辑器来打开这个文件,并复制内容.粘贴这个文件到系统的控制台(你正好登陆到系统内的任一菜单中),或你输入命令system->License 的窗口中或Winbox. RouterOS在安装一个新的硬件设备将丢失一个软件许可证,但是你不能把RouterOS移动到不通的硬盘上你必须要重新购买另外的许可证(除了硬件有问题的状况).附加的信息可以些邮件到.注意!重新安装你的MikroTik路由器时不要使用MS-DOS操作系统形式的命令或另外的格式的磁盘!这将引起改变你的软件-ID,因此你需要另外的许可证运行在你MikroTik路由器上登陆到MikroTik 路由器中描述当你通过一台终端登陆到路由器中,将呈现出MikroTik RouterOS?的登陆提示符..用户明是\'admin\'没有密码(按\'Enter\')在第一时间内登陆到路由器中.实例: MikroTik v2.8 Login:
ROS NAT 端口映射全攻略 发表时间: 2010-4-14 来源:mikrotik中国作者:EDCwifi-Mikrotik中国总代理 如果要将内网的服务器移动到外网中去,并让其它公网IP 来访问该服务器,这时就要用NAT 端口映射。 要配置的参数如下: 外网IP:211.191.123.89/28,网关:211.191.123.81; 内网WEB 服务器地址:192.168.100.8/24,服务器运行在80 端口。 在配置NAT 端口映射之前先要配置好RouterOS 的基本设置,包括外网IP、网关、DNS。 操作路径:/ip firewell nat。 Chain:链表,选择目标地址映射; Dst-address:目标地址,这里的目标地址是路由器本身的公网IP,它将作为 其它公网IP 访问的目标地址; Protocol:协议选择TCP; Dst-port;目标端口,这里假设为5000,(口号范围为0-65535,常用端口不 要占用) 选择Action 设置以下参数: Action:选择dst-nat; To-address:填内部的服务器地址; To-ports:内部服务器的动行端口。
注:当内网也从外网IP 地址访问内网的WEB 服务器时,做端口映射与内网地址转换的设 置有关。NAT 设置成chain=srcnant action=mesqurade,那么内可以通过外网IP 访问到服务器 的WEB 网页。如果NAT 设置为:chain=srcnat out-interface=wan(外网卡) action=mesqurade, 则还要做以下设置: chian=srcnat src-address=192.168.100.0/24 action=src-nat to-address=211.191.123.89。图示如下:
ROS2.9.27全部命令 1、开机登陆以后常用的一个?是常用的帮助命令,可以列出可用的命令及简单的说明。 2、有些英文命令很长,可以简写如interface ,你输入in后回车自动就会进入interface了。或者你可以按下tab键来帮你完成长英文命令的输入。 3、有些命令的参数很多,你不知道的时候可以输入命令后加空格?,如 print ?可以显示该命令的参数。 4、setup 该命令可是谁都要记得的,因为最初安装完router os 必须用它分配网卡的ip地址。 5、ip route add gate=211.12.*.14,220.163.*.12 该命令用于多线路接入时加入多个网关用的。 6、ip firewall add action=nat protocol=tcp dst-address=212.12.*.*/32:80 to-dst-address=192.168.0.198 该命令用于映射端口80到本地的 192.168.0.198上。 7、print 该命令有点用于列出所有的项目。 8、interface monitor-traffice 0,1,2 可以监视当前0,1,2网卡的活动情况。 9、ip firewall connection print 显示当前的所有的连接。 10、ip arp print 显示所有router os 知道的ip地址和mac地址的对应列表。 11、user active print 显示所有的router os 的活动用户。 12、system reboot 、system shutdown分别是重启和关机。 13、system reset 删除所有原来的配置,并重新启动router os. 14、system resource monitor 可以监视当前的cpu,和内存的使用情况。 15、log print 可以显示router os 的日志。 16、tool ping-speed 210.13.14.* 可以显示ping 的速度。
网吧专用Ros软路由+Winbox教程(图) 一:安装 1、光盘版的(转自雨纷飞大哥作品) 将iso文件刻录成可引导光盘。机器的硬盘设置为IDE0,即第一个IDE通道的主盘。 bios设置光盘引导系统,放入光盘启动机器得到如下 选择 2:Install RouteOS 2.8.18后稍等,得到如下画面: 用方向键和空格选择你需要的模组功能后,按"A"全选,摁“i“键确定安装。会再次询问你继续?yes or no?,摁“Y“. 然后又问:do you want to keep lod configuraton?你需要保留旧的结构么?摁“N 然后开始自动的格式化磁盘、安装核心、安装模组。最后提示: Press ENTER to Reboot,按回车重新启动机器。
重新启动后出现图1的那个引导画面(如果没有出现而直接进了登陆界面说明用硬盘引导了):
选择3: Crack RouteOS Floppy Disk,开始破解。 破解过程都是中文的。如果你的硬盘在IDE0:0的话破解是不会有问题的。否则可能出现系统文件被破坏、启动时0123456...循环出现等问题。 问你是否重启呢。把光盘拿出来后按下Y确定重启动 重新启动后开始登陆。初始用户名admin,初始密码为空。 咦?怎么还有提示注册的信息和Soft ID? 原来是还需要一个命令激活注册补丁才可以哦: 输入命令:/system license import file-name=key 或者缩写为/sy lic i f key 然后提示你是否重新启动。按Y重新启动 重新启动并用admin:““登陆后发现,提示注册的信息已经完全消失了,现在是正式版了
chhong@chhong-Studio-1435:~$ echo $ROS_PACKAGE_PATH /home/chhong/ros_workspace/rgbdslam/rgbd_benchmark/benchmark_data: /home/chhong/ros:/home/chhong/octomap_mapping-experimental: /home/chhong/ros_workspace: /home/chhong/ros_workspace: /opt/ros/electric/stacks chhong@chhong-Studio-1435:~$ rospack find roscpp [rospack] opendir error [No such file or directory] while crawling /home/chhong/ros [rospack] opendir error [No such file or directory] while crawling /home/chhong/octomap_mapping-experimental /opt/ros/electric/stacks/ros_comm/clients/cpp/roscpp chhong@chhong-Studio-1435:~$ roscd roscpp chhong@chhong-Studio-1435:/opt/ros/electric/stacks/ros_comm/clients/cpp/roscpp$ chhong@chhong-Studio-1435:/opt/ros/electric/stacks/ros_comm/clients/cpp/roscpp$ pwd /opt/ros/electric/stacks/ros_comm/clients/cpp/roscpp chhong@chhong-Studio-1435:/opt/ros/electric/stacks/ros_comm/clients/cpp/roscpp$ roscd roscpp/cmake chhong@chhong-Studio-1435:/opt/ros/electric/stacks/ros_comm/clients/cpp/roscpp/cmake$ pwd /opt/ros/electric/stacks/ros_comm/clients/cpp/roscpp/cmake chhong@chhong-Studio-1435:/opt/ros/electric/stacks/ros_comm/clients/cpp/roscpp/cmake$ roscd chhong@chhong-Studio-1435:/opt/ros/electric/ros$ pwd /opt/ros/electric/ros chhong@chhong-Studio-1435:/opt/ros/electric/ros$ roscd log No active roscore chhong@chhong-Studio-1435:~/.ros/log$ rosls roscpp_tutorials add_two_ints_client listener_class notify_connect add_two_ints_server listener_multiple parameters add_two_ints_server_class listener_single_message rosbuild.cmake anonymous_listener listener_threaded_spin ROS_NOBUILD babbler listener_unreliable src bin listener_with_tracked_object srv CMakeLists.txt listener_with_userdata srv_gen custom_callback_processing Makefile talker listener manifest.xml time_api listener_async_spin node_handle_namespaces timers chhong@chhong-Studio-1435:~/.ros/log$ roscd roscpp_tutorials/ chhong@chhong-Studio-1435:/opt/ros/electric/stacks/ros_tutorials/roscpp_tutorials$ chhong@chhong-Studio-1435:/opt/ros/electric/stacks/ros_tutorials/roscpp_tutorials$ roscd turtle turtle_actionlib/ turtlesim/ turtle_tf/ chhong@chhong-Studio-1435:/opt/ros/electric/stacks/ros_tutorials/roscpp_tutorials$ roscd turtlesim chhong@chhong-Studio-1435:/opt/ros/electric/stacks/ros_tutorials/turtlesim$ chhong@chhong-Studio-1435:/opt/ros/electric/stacks/ros_tutorials/turtlesim$ cd ~/ros_workspace chhong@chhong-Studio-1435:~/ros_workspace$ roscreate-pkg beginner_tutorials std_msgs rospy roscpp /home/chhong/ros_workspace/beginner_tutorials already exists, aborting