“工业机器人”设计大作业 作品题目:货物装卸机器人 专业:机械设计制造及其自动化 姓名:班级:学号: 姓名:班级:学号: 姓名:班级:学号: 指导教师:陈明
1 前言 货物装卸作业是指用一种设备握持工件,是指从一个加工位置移到另一个加工位置。货物装卸机器人可安装不同的末端执行器以完成各种不同形状和状态的工件货物装卸工作,大大减轻了人类繁重的体力劳动。目前世界上使用的货物装卸机器人愈10 万台,被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛货物装卸、集装箱等的自动货物装卸。部分发达国家已制定出人工货物装卸的最大限度,超过限度的必须由货物装卸机器人来完成。装卸货物装卸是物流的功能要素之一,在物流系统中发生的频率很高 2 设计方案论证 本课题通过对货物装卸机器人工作对象及工作场所的分析研究,深入了解其工作是 如何进行,各部分零部件应该如何运行以及如何紧密配合,先确定其总体结构再对主要 零部件进行设计计算确定其尺寸大小以及确定电机型号。 2.1 基本思想 (1)设计要考虑要求和工作环境的限制。 (2)考虑到货物装卸货物时所需要精确度不是很高,为了简化结构,境地成本,采用 角铁焊接结构。 (3)为了满足设计要求,须设计三个独立的电机驱动系统,各部分之间通过计算 机控制、协调工作。 (4)本次设计只是该题目的机械部分,而对应控制部件的考虑较少。 3 仓库货物装卸机器人的设计计算 3.1 货物装载伸缩装置的设计 3.1.1 确定传动方案 我们所学的传动方式有以下几种:带传动、链传动、齿轮传动、蜗轮蜗杆传动和钢 丝绳传动等,一般地说,啮合传动传递功率的能力高于摩擦传动;蜗轮传动工作的发热 情况较为严重,因而传动的功率不宜过大;摩擦轮传动由于必须有足够的压紧力,故而 在传递同一圆周力时,其压轴力比齿轮传动的大几倍,因而不宜用于大功率传动。带传
支持向量机(SVM )原理及应用 一、SVM 的产生与发展 自1995年Vapnik (瓦普尼克)在统计学习理论的基础上提出SVM 作为模式识别的新方法之后,SVM 一直倍受关注。同年,Vapnik 和Cortes 提出软间隔(soft margin)SVM ,通过引进松弛变量i ξ度量数据i x 的误分类(分类出现错误时i ξ大于0),同时在目标函数中增加一个分量用来惩罚非零松弛变量(即代价函数),SVM 的寻优过程即是大的分隔间距和小的误差补偿之间的平衡过程;1996年,Vapnik 等人又提出支持向量回归 (Support Vector Regression ,SVR)的方法用于解决拟合问题。SVR 同SVM 的出发点都是寻找最优超平面(注:一维空间为点;二维空间为线;三维空间为面;高维空间为超平面。),但SVR 的目的不是找到两种数据的分割平面,而是找到能准确预测数据分布的平面,两者最终都转换为最优化问题的求解;1998年,Weston 等人根据SVM 原理提出了用于解决多类分类的SVM 方法(Multi-Class Support Vector Machines ,Multi-SVM),通过将多类分类转化成二类分类,将SVM 应用于多分类问题的判断:此外,在SVM 算法的基本框架下,研究者针对不同的方面提出了很多相关的改进算法。例如,Suykens 提出的最小二乘支持向量机 (Least Square Support Vector Machine ,LS —SVM)算法,Joachims 等人提出的SVM-1ight ,张学工提出的中心支持向量机 (Central Support Vector Machine ,CSVM),Scholkoph 和Smola 基于二次规划提出的v-SVM 等。此后,台湾大学林智仁(Lin Chih-Jen)教授等对SVM 的典型应用进行总结,并设计开发出较为完善的SVM 工具包,也就是LIBSVM(A Library for Support Vector Machines)。LIBSVM 是一个通用的SVM 软件包,可以解决分类、回归以及分布估计等问题。 二、支持向量机原理 SVM 方法是20世纪90年代初Vapnik 等人根据统计学习理论提出的一种新的机器学习方法,它以结构风险最小化原则为理论基础,通过适当地选择函数子集及该子集中的判别函数,使学习机器的实际风险达到最小,保证了通过有限训练样本得到的小误差分类器,对独立测试集的测试误差仍然较小。 支持向量机的基本思想:首先,在线性可分情况下,在原空间寻找两类样本的最优分类超平面。在线性不可分的情况下,加入了松弛变量进行分析,通过使用非线性映射将低维输
2020中考复习物理经典考题训练——专题四十:简单机械 考点一:杠杆 1.用细绳系住厚度不均匀的木板的O处,木板恰好处于静止状态,且上表面保持水平。如图所示,两玩具车同时从O点附近分别向木板的两端匀速运动,要使木板在此过程始终保持平衡,必须满足的条件是( ) A.两车的质量相等B.两车的速度大小相等 C.质量较小的车速度较大D.两车同时到达木板两端 2.如图所示,在使用相同的钩码进行“探究杠杆的平衡条件”的实验中,要使调好的杠杆重新在水平位置平衡,应在A处悬挂钩码的个数是( ) A.1个B.2个 C.3个D.6个
3.如图所示的杠杆,动力F的力臂是( ) A.OD B.OF C.OA D.OC 4.人体中的许多部位都具有杠杆的功能。如图是人用手托住物体时手臂的示意图,当人手托 5 kg的物体保持平衡时,肱二头肌收缩对桡骨所施加力的大小一定( ) A.大于5 kg B.大于49 N C.小于49 N D.等于49 N 5.如图所示的是吊车起吊货物的结构示意图,伸缩撑杆为圆弧状,工作时它对吊臂的支持力始终与吊臂垂直,使吊臂绕O点缓慢转动,从而将货物提起。下列说法正确的是( )
A.吊臂是一个省力杠杆,但要费距离 B.吊臂是一个费力杠杆,但可以省功 C.匀速顶起吊臂的过程中,伸缩撑杆支持力的力臂变小 D.匀速顶起吊臂的过程中,伸缩撑杆支持力渐渐变小 6..如图所示的工具中,在使用时属于费力杠杆的是( ) 7.如图是使用简单机械匀速提升同一物体的四种方式(不计机械重和摩擦),其中所需动力最小的是( )
8.小明在水平地面上推如图所示的一只圆柱形油桶,油桶高40 cm,底部直径为30 cm,装满油后总重2 000 N。下列说法中正确的是( ) A.要使底部C稍稍离开地面,他至少应对油桶施加600 N的力 B.他用水平力虽没推动油桶,但他用了力,所以他对油桶做了功 C.他用水平力没推动油桶,是因为推力小于摩擦力 D.油桶匀速运动时,地面对油桶的支持力和油桶对地面的压力是平衡力 9花匠手握如图所示的修枝剪刀把手的末端,便可以轻松地剪断树枝。这时修枝剪刀属于________杠杆,它的支点在________点。使用时,若在轴上加润滑油,则可以提高杠杆的____________。
编号: 目录 摘要 (3) 1引言 (3) 2工业机器人技术现状与发展 (3) 2.1工业机器人技术概念 (3) 2.2工业机器人技术发展现状 (3) 2.3技术发展趋势 (5) 3外工业机器人现状 (5) 4国内工业机器人现状 (6) 5工业机器人市场现状 (8) 5.1工业机器人的需求情况 (8) 5.2工业机器人的销售情况 (8) 5.3国内工业机器人的市场特征 (9) 6工业机器人产业未来发展 (9) 7结语 (10) 参考文献 (11)
摘要:机器人的应用越来越广泛,需求越来越大,其技术研究与发展越来越深入。这将提高社会生产率与产品质量,为社会创造巨大的财富! Abstrent:The application of robot has been more and more widely used and the require is bigger and bigger.Its research and development becomes deeper and deeper.This will improve the effective of society and the quality of production.Also it will make great poverty for the society. 关键词:工业机器人技术、市场需求、技术应用、研究进展、发展趋势 一、引言 工业机器人诞生于20世纪60年代,在20世纪90年代得到迅速发展,是最先产业化的机器人技术。它是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃、应用日益广泛的领域。它的出现是为了适应制造业规模化生产,解决单调、重复的体力劳动和提高生产质量而代替人工作业。在我国,工业机器人的真正使用到现在已经接近20多年了,已经基本实现了试验、引进到自主开发的转变,促进了我国制造业、勘探业等行业的发展。随着我国改革开放的逐渐深入,国内的工业机器人产业将面对越来越大的竞争与冲击,因此,掌握国内工业机器人市场的实际情况,把握我国工业机器人的相关技术与研究进展,显得十分重要。 二、工业机器人技术现状与发展 2.1工业机器人技术概念 工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。
教学内容 简单机械 【基础知识】 1、定义:在力的作用下绕着固定点转动的硬棒叫杠杆。 说明:①杠杆可直可曲,形状任意。 ②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。 2、五要素——组成杠杆示意图。 ①支点:杠杆绕着转动的点。用字母O 表示。 ②动力:使杠杆转动的力。用字母F1表示。 ③阻力:阻碍杠杆转动的力。用字母F2表示。 说明动力、阻力都是杠杆的受力,所以作用点在杠杆上。 动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反 ④动力臂:从支点到动力作用线的距离。用字母l1表示。 ⑤阻力臂:从支点到阻力作用线的距离。用字母l2表示。 画力臂方法:一找支点、二画线、三连距离、四标签 ⑴找支点O;⑵画力的作用线(虚线);⑶画力臂(虚线,过支点垂直力的作用线作垂线);⑷标力臂(大括号)。 3、研究杠杆的平衡条件: ①杠杆平衡是指:杠杆静止或匀速转动。 ②实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。这样做的目的是:可以
方便的从杠杆上量出力臂。 ③结论:杠杆的平衡条件(或杠杆原理)是: 动力×动力臂=阻力×阻力臂。写成公式F1l1=F2l2也可写成:F1 / F2=l2 / l1 解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力与方向和力臂大小;然后根据具体的情况具体分析,确定如何使用平衡条件解决有关问题。(如:杠杆转动时施加的动力如何变化,沿什么方向施力最小等。) 解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值,要使动力最小,必须使动力臂最大,要使动力臂最大需要做到①在杠杆上找一点,使这点到支点的距离最远;②动力方向应该是过该点且和该连线垂直的方向。 4、应用: 说明:应根据实际来选择杠杆,当需要较大的力才能解决问题时,应选择省力杠杆,当为了使用方便,省距离时,应选费力杠杆。 五、滑轮 1、定滑轮:
IRB1600型机器人的运动学分析及仿真
目录 1.引言................................................................................................................ - 2 - 1.1 ABB公司简介.................................................................................... - 3 - 1.2ABB发展历史 .................................................................................... - 4 - 2. IRB1600 ........................................................................................................ - 5 - 2.1 IRB1600的资料................................................................................. - 6 - 2.2建立基于D-H方法的连杆坐标系 ................................................... - 8 - 2.3建立六自由度点焊机器人的运动学方程....................................... - 10 - 3. 虚拟样机的建立........................................................................................ - 12 - 3.1 导入.................................................................................................. - 12 - 3.2 添加约束副...................................................................................... - 13 - 3.3 基于ADAMS的机器人运动学仿真 ............................................. - 14 - 4. 结语............................................................................................................ - 18 - 5. 参考资料.................................................................................................... - 19 -
简单机械考点+例题-全面解析 一、简单机械选择题 1.工人师傅用如图所示的滑轮组,将重为800N 的重物缓慢匀速竖直提升3m ,人对绳的拉力F 为500N ,不计绳重和滑轮转轴处的摩擦,则( ) A .绳子自由端移动的距离为9m B .动滑轮的重力为200N C .人通过滑轮组做的有用功为1500J D .滑轮组的机械效率为53.3% 【答案】B 【解析】 试题分析:由图可知,滑轮组中由2段绳子承担物体和动滑轮的总重,即n=2,物体匀速竖直提升3m ,则绳子自由端移动的距离为:s=nh=2×3m=6m ,故A 错误. 此过程中,所做有用功为:W 有=Gh=800N×3m=2400J ,故C 错误. 所做总功为:W 总=Fs=500N×6m=3000J ; 额外功为:W 额=W 总-W 有=3000J-2400J=600J ,不计绳重和滑轮转轴处的摩擦,则额外功为克服动滑轮重力做的功,即W 额=G 动h ,动滑轮的重力G 动=W 额/h=600J/3m=200N ,故B 正确为答案. 滑轮组的机械效率 故D 错误. 考点:滑轮组的机械效率 有用功 额外功 2.如图,小明分别用甲、乙两滑轮把同一沙桶从1楼地面缓慢地提到2楼地面,用甲滑轮所做的功为W 1,机械效率为1η;用乙滑轮所做的总功率为W 2,机械效率为2η,若不计绳重与摩擦,则( )
A .W 1<W 2,η1>η2 B. W 1=W 2,η1<η2 C .W 1>W 2 , 1η<2η D .W 1=W 2 , 1η=2η 【答案】A 【解析】因为用甲、乙两滑轮把同一桶沙从一楼地面提到二楼地面,所以两种情况的有用功相同;根据η = W W 有总 可知:当有用功一定时,利用机械时做的额外功越少,则总功越 少,机械效率越高。而乙滑轮是动滑轮,所以利用乙滑轮做的额外功多,则总功越多,机械效率越低。即W 1
机器人测控技术 大作业 题目: 电气工程学院 学院名称:电气工程学院 专业班级:自动 学生姓名: 学号: 2015 指导教师:张世杰
考虑如图1所示的双关节刚性机械臂,试分析以下问题: 图1 双关节机械臂示意图 (1) 用D-H 建模法建立上述机械臂的运动学方程; (2) 忽略重力、摩擦力和干扰项的情况下,建立该机械臂的动力学 方程; (3) 如果取11l =,20.8l =,120.5m m ==,初始状态: 11220.100.10q q q q ???? ????????=?????????? ?? 试设计一个PD 控制器,让其跟踪一条如下指定的曲线: 12sin 2sin 2d d q t q t ππ=?? =?,并利用Matlab 中给出仿真结果。 解: Y 0 X 0 X 1 Y 1 X 2 Y2
①建立坐标系 a 、机座坐标系{0} b 、杆件坐标系{i } ②确定参数 d i ——相邻坐标系x 轴之间的距离; θi ——相邻坐标系x 轴之间的夹角; l i ——相邻坐标系z 轴之间的距离; αi ——相邻坐标系z 轴之间的夹角。 ③相邻杆件位姿矩阵 M 01=Rot(z,θ1)·Trans(l 1,0,0) = 1 00 01000011 011θθθθc s s c - 1 000010000101 l 001 = 1 01001 1011 1 1011θθθθθθs L c s c L s c - 同理可得: M 12=Rot(z,θ2)·Trans(l 2,0,0) = 1 01002 20222 2022θθθθθθs L c s c L s c - M 23(h )=Rot(z,θ3)·Trans(l 3,0,0) = 1 01003 30333 3033θθθθθθs L c s c L s c -
一、选择题(每小题2分,共30分) 1.以下工具:①钢丝钳;②镊子;③扳手;④扫帚;⑤钓鱼竿;⑥瓶盖起子,在正常使用情况下属于省力杠杆的是() A、①③⑥ B、②④⑤ C、①④⑤ D、②③⑥ 3.关于浮力,下列说法中正确的是() A、浮力的大小等于物体的重力 B、浮力的大小等于物体排开液体的重力 C、浮力的大小等于容器中液体受到的重力 D、浮力的大小等于同体积的液体的重力4.关于平衡力,下列说法正确的是() A、物体在平衡力的作用下一定保持静止状态 B、作用在物体上的两个力的三要素完全相同,这两个力一定是平衡力 C、物体受到重力和拉力的作用,这两个力方向相反,它们一定是平衡力 D、运动物体在平衡力的作用下一定保持匀速直线运动状态 5.用剪刀剪叠得较厚的纸片时,用剪刀的尖部不易剪断,而用中部就容易些,这是因为() A、增大了动力 B、减小了阻力 C、减小了阻力臂 D、增大了动力臂6.在家庭的浴室中,为了防止地面沾水使人打滑跌倒,下列采取的措施错误的是() A、浴室地面上应铺上带有凸凹花纹的地砖 B、人沐浴时穿的拖鞋鞋底带有凸凹花纹 C、脚底下放一条毛巾 D、穿上平底的塑料拖鞋 7.关于滑轮,下列说法错误的是() A、使用定滑轮不省力,但是能改变动力的方向 B、使用动滑轮能省一半力,还能改变动力的方向 C、定滑轮实质是个等臂杠杆 D、动滑轮实质是个动力臂为阻力臂两倍的杠杆8.如图所示的杠杆,O为支点,B点挂一重物G, 在A点分别施力F1、F2、F3,使杠杆平衡,这三个 力中最小的是() A、F1 B、F2 C、F3 D、无法确定 9.用下图所示的装置匀速提升重物G,若摩擦和动滑轮重均不计,那么需要的拉力F 最大的是 ()A、甲B、乙C、丙 D、丁 3 甲乙 丙丁
简单机械专题(含答案)经典 一、简单机械选择题 1.如图,O为拉杆式旅行箱的轮轴,OA为拉杆.现在拉杆端点A处施加一竖直向上的力F,使箱体从图示位置绕O点缓慢逆时针转至接近竖直位置.则力F的大小 A.一直变大B.始终不变 C.一直变小D.先变小后变大 【答案】B 【解析】 【详解】 由题意可知,箱体的重力不变,也就是杠杆的阻力大小不变,动力F竖直向上,重力G竖直向下,这两个力的方向始终平行,根三角形的相似性可知,动力臂与阻力阻的比值是不变的,根据杠杆的平衡条件可知动力与阻力的比值也是不变的,由于阻力不变,所以动力F的大小是始终不变的,故应选B. 2.如图所示,利用动滑轮提升一个重为G的物块,不计绳重和摩擦,其机械效率为60%.要使此动滑轮的机械效率达到90%,则需要提升重力为G的物块的个数为() A.3 个B.4 个C.5 个D.6 个 【答案】D 【解析】 【详解】 不计绳重和摩擦,,,要使,则. 3.物体做匀速直线运动,拉力F=60N,不计滑轮间的摩擦和动滑轮的自重,则物体受到的摩擦力是 A.60 N B.120 N C.20 N D.180 N
【答案】D 【解析】 【分析】 分析滑轮组的动滑轮绕绳子的段数,不计滑轮间的摩擦和动滑轮的自重,根据得到物体受到的摩擦力。 【详解】 从图中得到动滑轮上的绳子段数为3,不计滑轮间的摩擦和动滑轮的自重,物体受到的摩擦力:f=3F=3×60N=180N。 故选D。 【点睛】 本题考查滑轮组的特点,解决本题的关键要明确缠绕在动滑轮上的绳子的段数。 4.如图所示,动滑轮重为1 N,拉力F为5 N,则重物G和弹簧秤读数为 A.G为4 N,弹簧秤读数为5 N B.G为9 N,弹簧秤读数为10 N C.G为10 N,弹簧秤读数为5 N D.G为9 N,弹簧秤读数为5 N 【答案】D 【解析】 此时弹簧秤与拉力F共同承担重物和滑轮的重力,因拉力F为5N,所以弹簧秤读数也为 5N;,所以G=9N,故选项D正确; 故选D. 5.如图为工人用力撬起石头的情景,小亮在图中画出了四个作用于硬棒上的力,其中能正确表示工人左手施力且最省力的是() A.F1B.F2C.F3D.F4 【答案】C 【解析】
可编辑版 《机器人技术》大作业 (2015年秋季学期) 题目工业机器人概述 姓名 学号 班级 专业机械设计制造及其自动化 报告提交日期2015年12月5日 哈尔滨工业大学 .
内容及要求 1.以某种机器人(如搬运、焊接、喷漆、装配等工业机器人;服务机器人; 仿生鱼、蛇等仿生机器人;军用及其它机器人等)为例,撰写一篇大作业,题目自拟,以下内容仅作参考: 1) 机器人的机械结构设计(包括各部分名称、功能、传动等); 2) 机器人的运动学及动力学分析; 3) 机器人的控制及轨迹规划; 4) 驱动及伺服系统设计; 5) 电气控制电路图及部分控制子程序。 2.题目自拟,拒绝雷同和抄袭; 3.参考文献不少于7篇,其中至少有2篇外文文献; 4.报告统一用该模板撰写,字数不少于5000字,上限不限; 5.正文为小四号宋体,1.25倍行距;图表规范,标注为五号宋体; 6.用A4纸单面打印;左侧装订,1枚钉; 7.提交打印稿及03版word电子文档,由班长收齐。 8.此页不得删除。 评语: 成绩(20分):教师签名: 年月 日
工业机器人概述 机器人学是当今世界极为活跃的研究领域之一,它涉及计算机科学、机械学、电子学、自动控制、人工智能等多种学科。随着计算机、人工智能和光机电一体化技术的迅速发展,机器人已经成为人类的好帮手。在航空航天,深海探测中,往往使用机器人代替人类去完成复杂的极限工作任务。 工业机器人是一个多功能、多自由度的机械和电气一体化的自动机械设备和系统,它可以在制造过程中完成各种任务。它结合制造主机或生产线,可以形成一个单一的或多台机器自动化系统,在无人参与下,实现搬运、焊接、装配和喷涂等多种生产作业。目前,工业机器人技术飞速发展,在生产中的应用日益广泛,已成为现代制造业重要的生产高度自动化设备。 一、工业机器人特性 自20世纪60年代美国第一代机器人的开始,工业机器人的发展和应用迅速发展起来,工业机器人的最重要的特性概括如下。 1、可编程。生产自动化的进一步发展是柔性自动化。工业机器人能根据工作环境不同、做出相应规划和变化,因而在小批量多品种的高效柔性制造过程可以起到很好的作用,是柔性制造系统(FMS)的重要组成部分。 2、拟人化。工业机器人在机械结构上类似于人体行走、腰转、大臂、小臂、手腕、手爪和部分,在控制上有计算机类似大脑。此外,智能工业机器人具有许多类似生物传的感器,如皮肤接触传感器、力传感器、负载传感器、视觉传感器、声传感器、语言功能等。该传感器提高了自适应能力。 3、通用性。除了专门的特种工业机器人外,一般工业机器人在执行不同任务时具有很好的通用性。例如,更换工业机器人末端执行器(夹具、工具等)可以执行不同的任务。 4、机电一体化。工业机器人技术涉及的学科相当广泛,但总结起来就是是机电一体化技术。第三代智能机器人不仅具有获取外界环境信息的能力,而且具有记忆、语言理解、图像识别、推理和判断等能力,这与微电子技术、特别是计算机技术的应用有着密切的关系。因此,机器人技术的发展将带动其他技术的发展,机器人技术的发展和应用也可以验证一个国家科技和工业技术的发展和水平。 二、工业机器人组成 工业机器人系统由三大部分和六个子系统组成。三大部分:机部分、传感部分、控制部分。六个子系统:驱动系统、机械结构系统、感觉系统、机器人环境交互系统、人机交互系统、控制系统。 1、驱动系统,要使机器人运行起来,就需给各个关节即每个运动自由度安置传动装置,这就是驱动系统。驱动系统可以是液压传动、气动传动、电动传动,或者把它们结合起来应用的综合系统;可以直接驱动或者通过同步带、链条、轮系、谐波齿轮等机械传动
最新简单机械练习题经典 一、简单机械选择题 1.如图所示,滑轮组的每个滑轮质量相同,用它们将重为G1、G2的货物提高相同的高度(不计绳重和摩擦),下列说法正确的是 A.用同一个滑轮组提起不同的重物,机械效率不变 B.若G1=G2,则甲的机械效率大于乙的机械效率 C.若G1=G2,则拉力F1与F2所做的总功相等 D.若G1=G2,则甲、乙滑轮组所做的额外功相等 【答案】B 【解析】 【分析】 (1)同一滑轮组提起重物不同时,所做的额外功相同,有用功不同,根据机械效率为有用功和总功的比值判断滑轮组机械效率是否变化; (2)滑轮组所做的总功为克服物体的重力和动滑轮重力所做的功,根据W=Gh比较两者所做总功之间的关系; (3)滑轮组所做的有用功为克服物体重力所做的功,根据W=Gh比较两者的大小,再根据机械效率为有用功和总功的比值比较两者机械效率之间的关系; (4)根据W=Gh比较有用功的大小. 【详解】 A.用同一个滑轮组提起不同的重物时,额外功不变,但有用功不同,有用功和总功的比值不同,则滑轮组的机械效率不同,故A错误; BC.若G1=G2,且货物被提升的高度相同,根据W有=G物h可知,两滑轮组所做的有用功相等; 不计绳重和摩擦,拉力所做的总功为克服物体重力和动滑轮重力所做的功,因甲滑轮组只有1个动滑轮(即动滑轮重更小),所以由W总=(G物+G动)h可知,甲滑轮组做的总功 小于乙滑轮组做的总功,由 W W η=有 总 可知,甲滑轮组的机械效率高,故B正确,C错误; D.两物体被提升的高度相同,动滑轮的重力不同,根据W=G动h可知,甲、乙滑轮组所做的额外功不相等,故D错误. 故选B.
机器人技术课程作业——PUMA机器人 如上图所示的PUMA机器人,要求实现右图所示的运动,求解: ①建立坐标系; ②给出D-H参数表; ③推导正运动学、逆运动学; ④编程得出工作空间。 解: ①建立坐标系 a、建立原始坐标系
b、坐标系简化 ②给出D-H参数表 a、PUMA机器人的杆件参数 d0.6604m,1 d 0.14909m, 2 d 0.43307m, 4 d 0.05625m 6 a 0.4318m,a3 0.02032m 2 b、D-H参数表 关节i i i L i d i 运动范围 1 90 0 0 0 -160 o~160o o o 2 0 -90 0 d2 0.14909m -225 ~45 3 -90 0 a2 0.4318m 0 -45 o ~225o 4 0 -90 a3 0.02032m d4 0.43307m -110 o ~170o 5 0 90 0 0 -100 o ~100o 6 0 -90 0 d6 0.05625m -266 o ~266o
③推导正运动学、逆运动学 a、正运动学推导 c s0a i i i 1 由式i1 T i s c c c s d s i i1i i1i1i i1 s s c s c d c i i1i i1i1i i1 可得:0001 c s 1100c s 22 00c s0a 332 0 T 1s c 00 11 0010 1 T 2 001 d 2 s c 22 00 2 T 3 s c 00 33 0010 000100010001 c s0a 443 c s 55 00c s 66 00 3 T 4001 d 4 s c 44 00 4 T 5 0010 s c 55 005T 6 0010 s c 66 00 000100010001 由0012345 T T T T T T T,得机械手变换矩阵: 6123456 n o a p x x x x 0 T 6n o a p y y y y n o a p z z z z 0001 n c(c c c c s s c)s c s c c c s s s c s x236541641236516541641 n c(c c c s s s s)s c s s c c s c s c c y236541641236516541641 n s(c c c s s)c c s z23654642365 o c(s c c c c s c)s s s c s c s s c c s x236541641236516541641 o c(s c c s c s s)s s s s s s c c c c c y236541641236516451641 o s(s c c s s)c c s z23654642365 a c s c c s c c s s s x235412351541 a c s c s s c s s s c y235412351541 a c c s s c z2352354
支持向量机(SVM )简明学习教程 一、最优分类超平面 给定训练数据),(,),,(11l l y x y x ,其中n i R x ∈,}1,1{-∈i y 。 若1=i y ,称i x 为第一类的,I ∈i x ;若1-=i y ,称i x 为第二类的,II ∈i x 。 若存在向量?和常数b ,使得?????II ∈<-I ∈>-i i T i i T x if b x x if b x ,0,0?? (1),则该训练集可被超平面 0=-b x T ?分开。 (一)、平分最近点法 求两个凸包集中的最近点d c ,',做d c ,'的垂直平分面x ,即为所求。 02 )(2 22 2 =-- -?-=-d c x d c x d x c T ,则d c -=?,2 ) ()(d c d c b T +-= 。 求d c ,,?? ?? ?≥==≥==∑∑∑∑-=-===. 0,1, . 0,1,1 111 i y i y i i i y i y i i i i i i x d x c αα ααα α
所以2 1 1 2 ∑∑-==-= -i i y i i y i i x x d c αα,只需求出最小的T l ),,(1ααα =。 算法:1)求解. 0,1,1..2121min 1 1 2 12 11≥===-∑∑∑∑∑-===-==i y i y i l i i i i y i i y i i i i i i t s x y x x αααααα;2)求最优超平面0=-b x T ?。 (二)、最大间隔法 附加条件1=?,加上(1)式。记C x C i T x i >=I ∈??min )(1,C x C i T x i <=II ∈??max )(2。 使?????II ∈<-I ∈>-=-= i i T i i T x if b x x if b x t s C C ,0,0,1..2 ) ()()(max 21??????ρ (2) 可以说明在(2)下可以得到一个最优超平面,且该超平面是唯一的。 如何快速生成一个最优超平面??? 考虑等价问题:求权向量w 和b ,使?????II ∈-<-I ∈>-i i T i i T x if b x w x if b x w ,1,1,且?最小。 这种写法已经包含最大间隔。 事实上b C C C x if C b x w x if C b x w i i T i i T =+=??????II ∈=+-))()((21),(1),(121021????中心,而w w =?, 故w b C = ,w C C 1 2)()()(21=-=???ρ。 所以(2)式可以转化为求解: 1 )(..min ≥-b x w y t s w i T i (3) 总结,求最优超平面,只需求解: 1 )(..2 1)(min ≥-= Φb x w y t s w w w i T i T (QP1) 对(QP1)构造lagrange 函数: 令∑=---=l i i T i i b x w y w b w L 1 2]1)([21),,(αα,其中0),,(1≥=T l ααα 为lagrange 乘子。 下求L 的鞍点:
简单机械经典例题(word) 一、简单机械选择题 1.如图所示,用滑轮组提升重物时,重200N的物体在5s内匀速上升了1m.已知拉绳子的力F为120N,如果不计绳重及摩擦,则提升重物的过程中 A.绳子自由端被拉下3m B.拉力F做的功为200J C.滑轮组的机械效率是83.3% D.拉力F的功率是40W 【答案】C 【解析】 【详解】 A、物重由两段绳子承担,因此,当物体提升1m时,绳子的自由端应被拉下2m,故A错误; B、拉力为120N,绳子的自由端应被拉下2m,则拉力做功为: ,故B错误; C、滑轮组的机械效率,故C正确; D、拉力F的功率,故D错误. 故选C. 【点睛】 涉及机械效率的问题时,关键是要清楚总功、有用功、额外功都在哪,特别要清楚额外功是对谁做的功,弄清楚这些功后,求效率和功率就显得简单了。 2.在生产和生活中经常使用各种机械,使用机械时 A.功率越大,做功越快 B.做功越多,机械效率越高 C.做功越快,机械效率越高 D.可以省力、省距离,也可以省功 【答案】A 【解析】 【分析】 (1)功率是表示做功快慢的物理量,即功率越大,做功越快; (2)机械效率是表示有用功所占总功的百分比;即效率越高,有用功所占的比例就越大;(3)功率和效率是无必然联系的;
(4)使用任何机械都不省功. 【详解】 A.功率是表示做功快慢的物理量,故做功越快功率一定越大,故A正确; B.机械效率是表示有用功所占总功的百分比,故做功多,而不知道是额外功还是有用功,所以无法判断机械效率,故B错误; C.由于功率和效率没有直接关系,所以功越快,机械效率不一定越高,故C错误;D.使用任何机械都不省功,故D错误. 故选A. 3.用一个定滑轮和一个动滑轮组成的滑轮组把重150N的物体匀速提升1m,不计摩擦和绳重时,滑轮组的机械效率为60%.则下列选项错误的是() A.有用功一定是150J B.总功一定是250J C.动滑轮重一定是100N D.拉力大小一定是125N 【答案】D 【解析】 【分析】 知道物体重和物体上升的高度,利用W=Gh求对物体做的有用功; 又知道滑轮组的机械效率,利用效率公式求总功,求出了有用功和总功可求额外功,不计绳重和摩擦,额外功W额=G轮h,据此求动滑轮重; 不计摩擦和绳重,根据F=1 n (G物+G轮)求拉力大小. 【详解】 对左图滑轮组,承担物重的绳子股数n=3,对物体做的有用功:W有=Gh=150N×1m=150J, 由η=W W 有 总 ,得:W总= W 有= 150 60% J =250J,因此,W额=W总-W有=250J-150J=100J;因为不 计绳重和摩擦,W额=G轮h,所以动滑轮重:G轮=W h 额= 100 1 J m =100N,拉力F的大小: F=1 3 (G物+G轮)= 1 3 (150N+100N)= 250 3 N;对右图滑轮组,承担物重的绳子股数 n=2,对物体做的有用功:W有=Gh=150N×1m=150J,由η=W W 有 总 ,得:W总
模式识别课程大作业报告——支持向量机(SVM)的实现 : 学号: 专业: 任课教师: 研究生导师:
容摘要 支持向量机是一种十分经典的分类方法,它不仅是模式识别学科中的重要容,而且在图像处理领域中得到了广泛应用。现在,很多图像检索、图像分类算法的实现都以支持向量机为基础。本次大作业的容以开源计算机视觉库OpenCV 为基础,编程实现支持向量机分类器,并对标准数据集进行测试,分别计算出训练样本的识别率和测试样本的识别率。 本报告的组织结构主要分为3大部分。第一部分简述了支持向量机的原理;第二部分介绍了如何利用OpenCV来实现支持向量机分类器;第三部分给出在标准数据集上的测试结果。
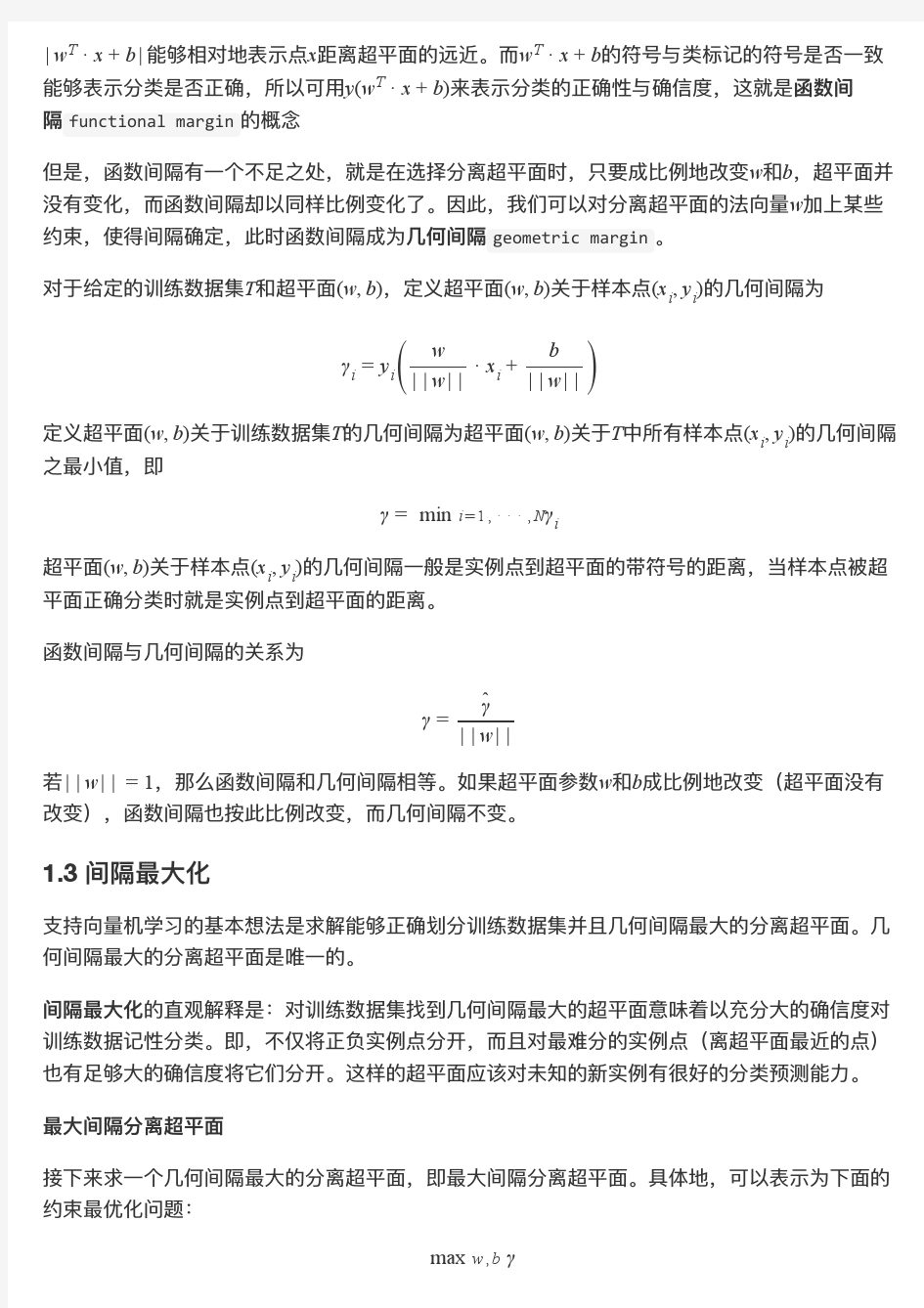
一、支持向量机原理概述 在高维空间中的分类问题实际上是寻找一个超平面,将两类样本分开,这个超平面就叫做分类面。两类样本中离分类面最近的样本到分类面的距离称为分类间隔。最优超平面指的是分类间隔最大的超平面。支持向量机实质上提供了一种利用最优超平面进行分类的方法。由最优分类面可以确定两个与其平行的边界超平面。通过拉格朗日法求解最优分类面,最终可以得出结论:实际决定最优分类面位置的只是那些离分类面最近的样本。这些样本就被称为支持向量,它们可能只是训练样本中很少的一部分。支持向量如图1所示。 图1
图1中,H是最优分类面,H1和H2别是两个边界超平面。实心样本就是支持向量。由于最优超平面完全是由这些支持向量决定的,所以这种方法被称作支持向量机(SVM)。 以上是线性可分的情况,对于线性不可分问题,可以在错分样本上增加一个惩罚因子来干预最优分类面的确定。这样一来,最优分类面不仅由离分类面最近的样本决定,还要由错分的样本决定。这种情况下的支持向量就由两部分组成:一部分是边界支持向量;另一部分是错分支持向量。 对于非线性的分类问题,可以通过特征变换将非线性问题转化为新空间中的线性问题。但是这样做的代价是会造成样本维数增加,进而导致计算量急剧增加,这就是所谓的“维度灾难”。为了避免高维空间中的计算,可以引入核函数的概念。这样一来,无论变换后空间的维数有多高,这个新空间中的线性支持向量机求解都可以在原空间通过核函数来进行。常用的核函数有多项式核、高斯核(径向基核)、Sigmoid函数。 二、支持向量机的实现 OpenCV是开源计算机视觉库,它在图像处理领域得到了广泛应用。OpenCV中包含许多计算机视觉领域的经典算法,其中的机器学习代码部分就包含支持向量机的相关容。OpenCV中比较经典的机器学习示例是“手写字母分类”。OpenCV中给出了用支持向量机实现该示例的代码。本次大作业的任务是研究OpenCV中的支持向量机代码,然后将其改写为适用于所有数据库的通用程序,并用标准数据集对算法进行测试。本实验中使用的OpenCV版本是2.4.4,实验平台为Visual Studio 2010软件平台。 OpenCV读取的输入数据格式为“.data”文件。该文件记录了所有数据样
简单机械练习题(含答案)经典 一、简单机械选择题 1.如图所示,属于费力杠杆的是 A .用镊子夹物品 B .用汽水扳子开瓶盖 C .用手推车推货物 D .用羊角锤起钉子 【答案】A 【解析】 【详解】 A 、用镊子夹物品时,动力臂小于阻力臂,是费力杠杆; B 、汽水扳子开瓶盖时,动力臂大于阻力臂,是省力杠杆; C 、用手推车推货物,动力臂大于阻力臂,是省力杠杆; D 、用羊角锤起钉子,动力臂大于阻力臂,是省力杠杆. 故选A . 【点睛】 此题考查的是杠杆的分类和特点,主要包括以下几种:①省力杠杆,动力臂大于阻力臂;②费力杠杆,动力臂小于阻力臂;③等臂杠杆,动力臂等于阻力臂. 2.如图是抽水马桶水箱进水自动控制的结构原理图,AOB 为一可绕固定点O 转动的轻质杠杆,已知:1:2OA OB =,A 端用细线挂一空心铝球,质量为2.7kg . 当铝球一半体积浸在水中,在B 端施加3.5N 的竖直向下的拉力F 时,杠杆恰好在水平位置平 衡.(33 2.710/kg m ρ=?铝,10/g N kg = )下列结果正确的是 A .该铝球空心部分的体积为33110m -? B .该铝球的体积为33310m -? C .该铝球受到的浮力为20N D .该铝球受到的浮力为40N 【答案】C 【解析】
根据密度的公式得到铝球实心部分的体积,根据杠杆的平衡条件得到A 端的拉力,铝球在水中受到的浮力等于重力减去A 端的拉力,根据阿基米德原理求出排开水的体积,从而得出球的体积,球的体积减去实心部分的体积得到空心部分的体积. 【详解】 铝球实心部分的体积:3333 2.71102.710/m kg V m kg m ρ -= = =??实, 由杠杆平衡的条件可得:F A × OA=F B ×OB ,2 3.571 A B OB F F N N OA ==?=, 铝球受到的浮力: 2.710/720F G F mg F kg N kg N N =-=-=?-=浮, 铝球排开水的体积:33 3320210110/10/F N V m g kg m N kg ρ-= ==???浮排水, 铝球的体积:3 3 3 3 22210410V V m m --==??=?球排, 则空心部分的体积:4 3 3 3 3 3 410110310V V V m m m ---=-=?-?=?空球实. 【点睛】 本题考查杠杆和浮力的题目,解决本题的关键知道杠杆的平衡条件和阿基米德原理的公式. 3.如图所示,小丽分别用甲、乙两滑轮把同一桶沙从一楼地面提到二楼地面,用甲滑轮所做的总功为W 1, 机械效率为η1;用乙滑轮所做的总功为W 2, 机械效率为η2, 若不计绳重与摩擦,则 A .W 1 = W 2 η1 = η2 B .W 1 = W 2 η1 < η2 C .W 1 < W 2 η1 > η2 D .W 1 > W 2 η1 < η2 【答案】C 【解析】 【分析】 由图可知甲是定滑轮,乙是动滑轮,利用乙滑轮做的额外功多,由“小明分别用甲、乙两滑轮把同一桶沙从一楼地面提到二楼地面”可知两种情况的有用功,再根据总功等于有用功加上额外功,可以比较出两种情况的总功大小.然后利用100%W W 有总 η=?即可比较出二者机 械效率的大小.