Matlab与adams联合仿真实例
本实例以matlab为外部控制程序,使用PID算法控制偏心杆的摆动,使偏心杆平衡到指定位置。
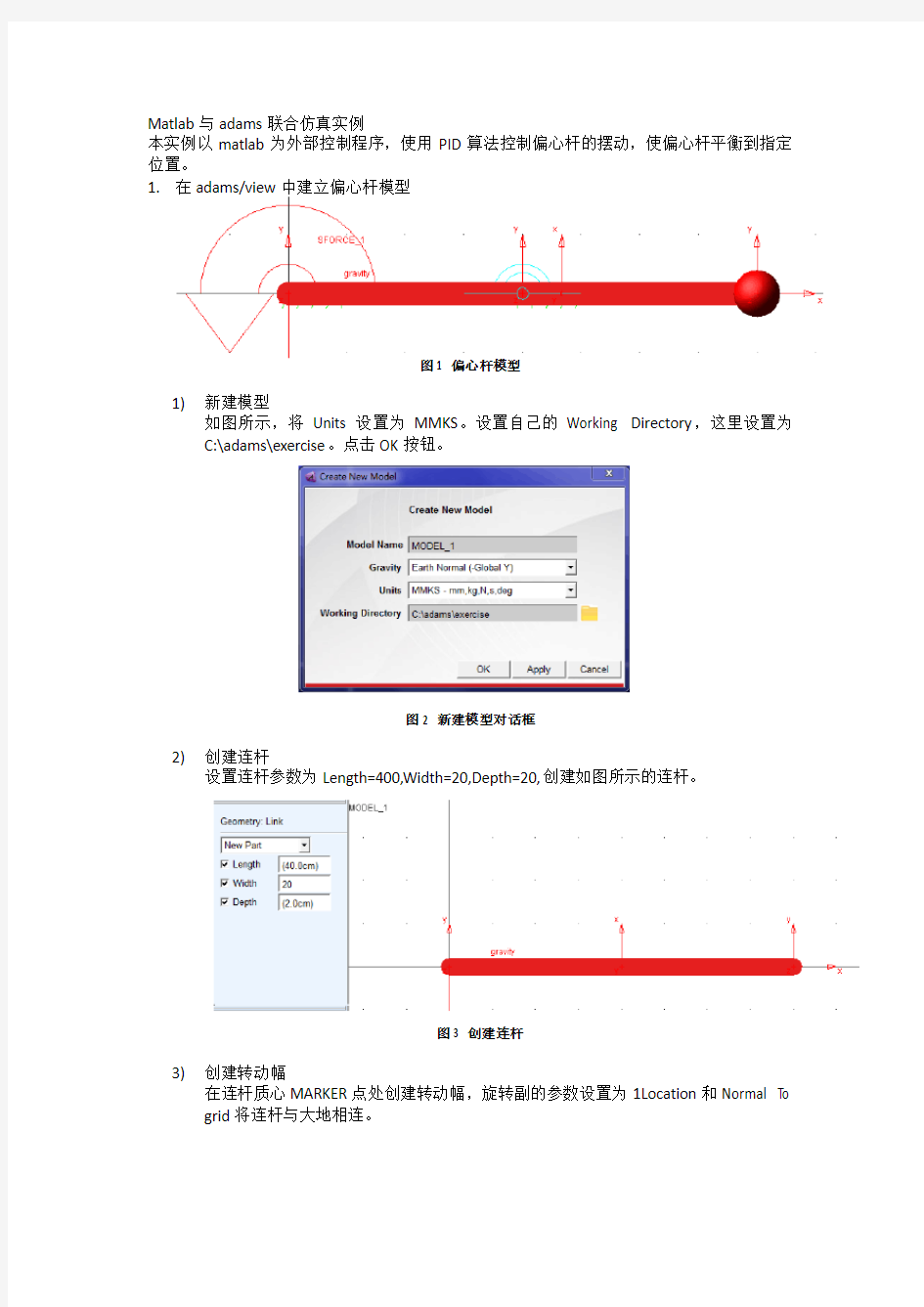
1.在adams/view中建立偏心杆模型
图1 偏心杆模型
1)新建模型
如图所示,将Units设置为MMKS。设置自己的Working Directory,这里设置为C:\adams\exercise。点击OK按钮。
图2 新建模型对话框
2)创建连杆
设置连杆参数为Length=400,Width=20,Depth=20,创建如图所示的连杆。
图3 创建连杆
3)创建转动幅
在连杆质心MARKER点处创建转动幅,旋转副的参数设置为1Location和Normal To grid将连杆与大地相连。
图4 创建转动幅
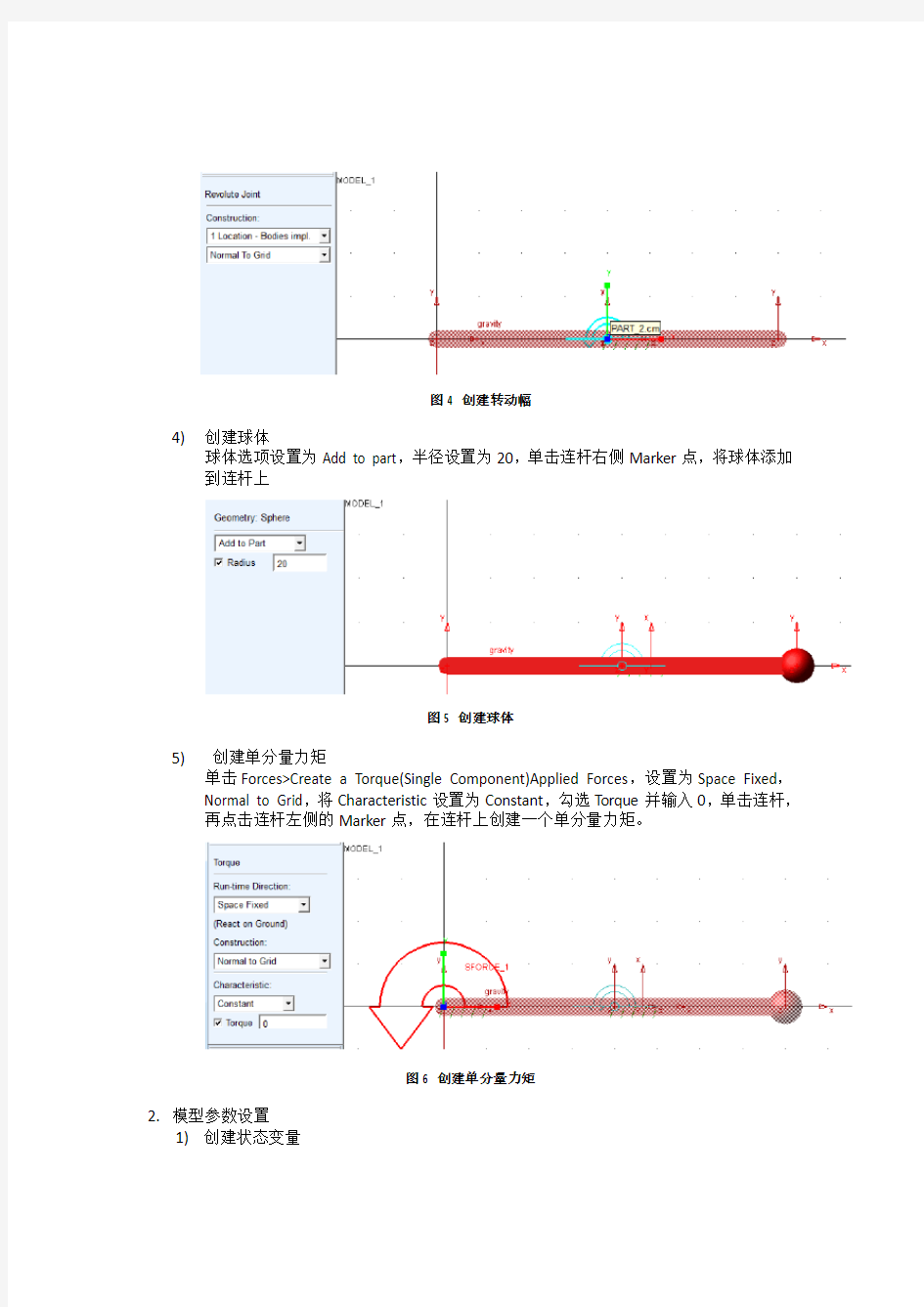
4)创建球体
球体选项设置为Add to part,半径设置为20,单击连杆右侧Marker点,将球体添加到连杆上
图5 创建球体
5)创建单分量力矩
单击Forces>Create a Torque(Single Component)Applied Forces,设置为Space Fixed,Normal to Grid,将Characteristic设置为Constant,勾选Torque并输入0,单击连杆,再点击连杆左侧的Marker点,在连杆上创建一个单分量力矩。
图6 创建单分量力矩
2.模型参数设置
1)创建状态变量
图7 新建状态变量
点击图上所示得按钮,弹出创建状态变量对话框,创建输入状态变量Torque,将Name 修改为.MODEL_1.Torque。
图8 新建输入状态变量Torque
再分别创建状态变量Angel和Velocity(后面所设计控制系统为角度PID控制,反馈变量为Angel,Velocity为Angel对时间求导,不需要变量Velocity,这里设置Velocity是为了展示多个变量的创建)。设置Angel的函数AZ(MARKER_3,MARKER_4)*180/PI,Velocity的函数为WZ(MARKER_3,MARKER_4)*180/PI。(MARKER_3为连杆上的点,MARKER_4为地面上固定的点)AZ(MARKER_i,MARKER_j)表示MARKER_i绕MARKER_j的Z轴旋转的角度,WZ表示MARKER_i绕MARKER_j的Z轴旋转的角速度。
图9 新建输出状态变量Angel、Velocity
2)将输入状态变量Torque与模型关联
双击单分量力矩图标,弹出Modify Torque对话框,修改Function为
VARVAL(.MODEL_1.Torque),VARVAL是用于返回Torque的值。
图10 将输入状态变量Torque与模型关联
3)指定输入输出变量
点击,右键单击Variable Name右边的文本框,如图所示选择Torque。
图11 指定输入变量
图12 指定输入变量Torque
点击,分别两次右键单击Variable Name右边的文本框,分别选择Angel和Velocity。
图13 指定输出变量
图14 指定输出变量为Angel、Velocity
4)导出控制参数
点击Plugins>Controls>Plant_Export。
图15 导出控制参数
点击From Pinput,选择PINPUT_1。
图16 设置输入输出参数
同样的方法,点击From Poutput选择POUTPUT_1。将Target Software设置为MATLAB。File Prefix设置为controls_PID,其他按照默认设置不做改动。
图17 导出控制参数对话框
3.建立MATLAB控制模型
1)导出ADAMS模型在MATLAB中的模块
启动MATLAB,先将MATLAB的工作目录指向ADAMS的工作目录,方法是修改当前的工作目录为之前在ADAMS中新建模型时的工作目录,这里是C:\adams。点击浏览文件夹选择文件夹C:\adams。在命令窗口提示符》下输入Controls_PID,也就是Controls_PID.m 的文件名,再在命令提示符》下输入adams_sys,弹出一个新窗口,这个窗口是MATLAB/Simulink的选择窗口其中S-Function方框表示ADAMS模型的非线性模型,即进行动力学计算的模型,State-Space表示ADAMS模型的线性化模型,在ADSMA_sub中包含有非线性方程,也包含许多有用的变量。
图18 导出ADAMS在MATLAB中的模块
图19 ADAMS在MATLAB中的模块
2)建立控制方案
在MATLAB/Simulink选择窗口中,单击菜单file>new>model或直接单击新建模型按钮,弹出新的Simulink窗口,单击工具栏中的保存按钮,将新窗口存盘为control_model.mdl(不能与.m文件同名)。将ADAMS_sub 方框拖拽到control_model窗口中,并搭建如图所示控制系统,此控制系统采用角度PID控制对偏心杆的角度进行控制。
也可以采用其他的控制方案。
图20 Simulink中PID控制图
3)设置MATLAB与ADAMS之间的数据交换参数
在control_model窗口中双击ADAMS_sub方框,在弹出的新的窗口中双击MSC Software,弹出数据交换参数设置对话框,将Adams Solver type设置为Fortran(如果设置为C++,ADAMS的构件不会运动,看不到动画效果。),将Interprocess设置为PIDE(DDE),如果不是在一台计算机上,选择TCP/IP,Animation mode设置成interactive,表示交互式计
算,在计算过程中会自动启动ADAMS/View,以便观察仿真动画,如果设置成batch,则用批处理的形式,看不到仿真动画,将Simulation Mode设置为continuous,将Communication Interval输入框中输入0.005,表示每隔0.005s在MATLAB和ADAMS之间进行一次数据交换,若仿真过慢,可以适当改大该参数,其他使用默认设置即可。
图21 数据交换参数设置对话框
4)仿真设置和仿真计算
单击窗口中菜单Simulation>Model Configuration Parameters,将Stop Time设置为20。Type 设置为Variable-step,其他使用默认选项,单击0K按钮。单击开始按钮,开始仿真。(若出现错误,重启MATLAB即可。每次启动MATLAB都需要选择路径包含Controls_PID.m、Controls_PID.cmd、Controls_PID.adm的文件夹,并输入Controls_PID(.m文件名)和adams_sys(ADAMS与MATLAB的接口命令))。仿真过程中将自动加载Adams/View窗口,并生成一个aviewAS.cmd的文件,如果你的Adams/View所设置的工作目录中含有此文件,那么启动软件时将不会出现欢迎界面,如果需要在启动时出现欢迎界面必须把此文件删除。
4.结果后处理
在MATLAB示波器中,可以得到角度、角速度和力矩的曲线,Angel、Velocity、Torque 的曲线如图所示。此模型初始受重力作用,产生转动,通过控制力矩地大小,最终角度、角速度、力矩都能达到稳定,角度达到预设值。控制框图的预设值为幅值为10的阶跃信号,即控制偏心杆的角度为100。观察角度的变化曲线发现大约在14s时,Angel的值达到预设值10,满足控制要求。
图22 角度变化曲线
图23 角速度变化曲线图21 角速度变化曲线
图24 力矩变化曲线
图25 Adams/Viwe中偏心杆在13.3450s时的状态。
在原模型中导入联合仿真结果文件Controls_PID.res(注意Model Name要选择原模型名),这样就可以在adams中进行后处理了。可以发现在模型树Results中多了一个Controls_PID的结果。对此结果可以使用adams的后处理模块Postprocessor进行后处理。
图26 导入联合仿真结果文件
图26 在adams中进行后处理
图27 在adsms中对结果进行动画处理
图28 adams中力矩后处理结果
PTC/USER 2009 Pro/ENGINEER Wildfire 5.0 操作实训
仅供操作实训使用
请勿在本手册上做记录或者将手册带离本次培训 会,以便其他参加者使用。
PTC/USER 2009
目录
交互性建模......................................................................................................................... 3 模具件设计效率............................................................................................................... 17 钣金件设计及焊接........................................................................................................... 24 灵活装配........................................................................................................................... 38 仿真教程........................................................................................................................... 49 工程图工作流程和效率................................................................................................... 61 Pro/ENGINEER Manikin..................................................................................................... 74 公差分析........................................................................................................................... 81
Pro/ENGINEER Wildfire 操作实训
Page 1
proe5.0装配体运动仿真 基础与重定义主体 基础是在运动分析中被设定为不参与运动的主体。 创建新组件时,装配(或创建)的第一个元件自动成为基础。 元件使用约束连接(“元件放置”窗口中“放置”页面)与基础发生关系,则此元件也成为基础的一部份。 如果机构不能以预期的方式移动,或者因两个零件在同一主体中而不能创建连接,就可以使用“重定义主体”来确认主体之间的约束关系及删除某些约束。 进入“机构”模块后,“编辑”—>“重定义主体”进入主体重定义窗口,选定一个主体,将在窗口里显示这个主体所受到的约束(仅约束连接及“刚体”接头所用的约束)。可以选定一个约束,将其删除。如果删除所有约束,元件将被封装。、、 特殊连接:凸轮连接 凸轮连接,就是用凸轮的轮廓去控制从动件的运动规律。PROE里的凸轮连接,使用的是平面凸轮。但为了形象,创建凸轮后,都会让凸轮显示出一定的厚度(深度)。 凸轮连接只需要指定两个主体上的各一个(或一组)曲面或曲线就可以了。定义窗口里的“凸轮1”“凸轮2”分别是两个主体中任何一个,并非从动件就是“凸轮2”。 如果选择曲面,可将“自动选取”复选框勾上,这样,系统将自动把与所选曲面的邻接曲面选中,如果不用“自动选取”,需要选多个相邻面时要按住Ctrl。 如果选择曲线/边,“自动选取”是无效的。如果所选边是直边或基准曲线,则还要指定工作平面(即所定义的二维平面凸轮在哪一个平面上)。 凸轮一般是从动件沿凸轮件的表面运动,在PROE里定义凸轮时,还要确定运动的实际接触面。选取了曲面或曲线后,将会出线一个箭头,这个箭头指示出所选曲面或曲线的法向,箭头指向哪侧,也就是运动时接触点将在哪侧。如果系统指示出的方向与想定义的方向不同,可反向。 关于“启用升离”,打开这个选项,凸轮运转时,从动件可离开主动件,不使用此选项时,从动件始终与主动件接触。启用升离后才能定义“恢复系数”,即“启用升离”复选框下方的那个“e”。 因为是二维凸轮,只要确定了凸轮轮廓和工作平面,这个凸轮的形状与位置也就算定义完整了。为了形象,系统会给这个二维凸轮显示出一个厚度(即深度)。通常我们可不必去修改它,使用“自动”就可以了。也可自已定义这个显示深度,但对分析结果没有影响。 需要注意: A.所选曲面只能是单向弯曲曲面(如拉伸曲面),不能是多向弯曲曲面(如旋转出来的鼓形曲面)。 B.所选曲面或曲线中,可以有平面和直边,但应避免在两个主体上同时出现。 C.系统不会自动处理曲面(曲线)中的尖角/拐点/不连续,如果存在这样的问题,应在定义凸轮前适当处理。
1.1机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计
的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Pro/ engineer中“机构”模块是专门用来进行运动仿真和动态分析的模块。PROE的运动仿真与动态分析功能集成在“机构”模块中,包括Mechanism design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。 使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定义特定运动副,创建能使其运动起来的伺服电动机,来实现机构的运动模拟。并可以观察并记录分析,可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。也可创建轨迹曲线和运动包络,用物理方法描述运动。 使用“机械动态”分析功能可在机构上定义重力,力和力矩,弹簧,阻尼等等特征。可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力和力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。 1.2总体界面及使用环境 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图1-3所示的“机构”下拉菜单,模型树增加了如图1-4所示“机构”一项内容,窗口右边出现如图1-5所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。 图1-1 由装配环境进入机构环境图
proe运动仿真经典教程!47 ProE野火运动仿真经典教程 关键词:PROE 仿真运动分析重复组件分析连接回放运动包络轨迹曲线版权:原创文章,转载请注明出处 机构仿真是PROE的功能模块之一。PROE能做的仿真内容还算比较好,不过用好的兄弟不多。当然真正专做仿真分析的兄弟,估计都用Ansys去了。但是,Ansys研究起来可比PROE麻烦多了。所以,学会PROE的仿真,在很多时候还是有用的。坛子里关于仿真的教程也有过一些,但很多都是动画,或实例。偶再发放一份学习笔记,并整理一下,当个基础教程吧。 希望能对学习仿真的兄弟有所帮助。 术语 创建机构前,应熟悉下列术语在PROE中的定义: 主体 (Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。 连接 (Connections) - 定义并约束相对运动的主体之间的关系。自由度(Degrees of Freedom) - 允许的机械系统运动。连接的作用是约束主体之间的相对 运动,减少系统可能的总自由度。 拖动 (Dragging) - 在屏幕上用鼠标拾取并移动机构。 动态 (Dynamics) - 研究机构在受力后的运动。 执行电动机 (Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。 齿轮副连接 (Gear Pair Connection) - 应用到两连接轴的速度约束。 基础 (Ground) - 不移动的主体。其它主体相对于基础运动。 接头 (Joints) - 特定的连接类型(例如销钉接头、滑块接头和球接头)。
运动 (Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。 环连接 (Loop Connection) - 添加到运动环中的最后一个连接。 运动 (Motion) - 主体受电动机或负荷作用时的移动方式。放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。 回放 (Playback) - 记录并重放分析运行的结果。 伺服电动机 (Servo Motor) - 定义一个主体相对于另一个主体运动的方式。可在接头或几 何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。 LCS - 与主体相关的局部坐标系。LCS 是与主体中定义的第一个零件相关的缺省坐标系。 UCS - 用户坐标系。 WCS - 全局坐标系。组件的全局坐标系,它包括用于组件及该组件内所有主体的全局坐标系。 运动分析的定义 在满足伺服电动机轮廓和接头连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,模拟机构的运动。运动分析不考虑受力,它模拟除质量和力之外的运动的所有方面。因此,运动分析不能使用执行电动机,也不必为机构指定质量属性。运动分析忽略模型中的所有动态图元,如弹簧、阻尼器、重力、力/力矩以及执行电动机等,所有动态图元都不影响 运动分析结果。 如果伺服电动机具有不连续轮廓,在运行运动分析前软件会尝试使其轮廓连续,如果不能使 其轮廓连续,则此伺服电机将不能用于分析。 使用运动分析可获得以下信息: 几何图元和连接的位置、速度以及加速度
机构仿真之运动分析基础教程 机构仿真是PROE的功能模块之一。PROE能做的仿真容还算比较好,不过用好的兄弟不多。当然真正专做仿真分析的兄弟,估计都用Ansys去了。但是,Ansys研究起来可比PROE麻烦多了。所以,学会PROE的仿真,在很多时候还是有用的。我再发一份学习笔记,并整理一下,当个基础教程吧。希望能对学习仿真的兄弟有所帮助。 术语 创建机构前,应熟悉下列术语在PROE中的定义: 主体(Body) - 一个元件或彼此无相对运动的一组元件,主体DOF=0。 连接(Connections) - 定义并约束相对运动的主体之间的关系。 自由度(Degrees of Freedom) - 允许的机械系统运动。连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。 拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。 动态(Dynamics) - 研究机构在受力后的运动。 执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。 齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。 基础(Ground) - 不移动的主体。其它主体相对于基础运动。 机构(Joints) - 特定的连接类型(例如销钉机构、滑块机构和球机构)。 运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。 环连接(Loop Connection) - 添加到运动环中的最后一个连接。 运动(Motion) - 主体受电动机或负荷作用时的移动方式。 放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。 回放(Playback) - 记录并重放分析运行的结果。 伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。可在机构或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。 LCS - 与主体相关的局部坐标系。LCS 是与主体中定义的第一个零件相关的缺省坐标系。 UCS - 用户坐标系。 WCS - 全局坐标系。组件的全局坐标系,它包括用于组件及该组件所有主体的全局坐标系。 运动分析的定义 在满足伺服电动机轮廓和机构连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,模拟机构的运动。运动分析不考虑受力,它模拟除质量和力之外的运动的所有方面。因此,运动分析不能使用执行电动机,也不必为机构指定质量属性。运动分析忽略模型中的所有动态图元,如弹簧、阻尼器、重力、力/力矩以及执行电动机等,所有动态图元都不影响运动分析结果。 如果伺服电动机具有不连续轮廓,在运行运动分析前软件会尝试使其轮廓连续,如果不能使其轮廓连续,则此伺服电机将不能用于分析。 使用运动分析可获得以下信息: 几何图元和连接的位置、速度以及加速度 元件间的干涉 机构运动的轨迹曲线 作为Pro/ENGINEER 零件捕获机构运动的运动包络 运动分析工作流程 创建模型:定义主体,生成连接,定义连接轴设置,生成特殊连接 检查模型:拖动组件,检验所定义的连接是否能产生预期的运动
proe机构运动仿真教程 典型效果图 1.1机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Pro/ engineer中“机构”模块是专门用来进行运动仿真和动态分析的模块。 PROE的运动仿真与动态分析功能集成在“机构”模块中,包括Mechanism design(机械设计)和Mechanism dynamics (机械动态)两个方面的分析功能。 使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定义特定运动副,创建能使其运动起来的伺服电动机,来实现机构的运动模拟。并可以观察并记录分析,可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。也可创建轨迹曲线和运动包络,用物理方法描述运动。 使用“机械动态”分析功能可在机构上定义重力,力和力矩,弹簧,阻尼等等特征。可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。
如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力和力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。 1.2总体界面及使用环境 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图1-3所示的“机构”下拉菜单,模型树增加了如图1-4所示“机构”一项内容,窗口右边出现如图1-5所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。 图1-1 由装配环境进入机构环境图 图1-2 机构模块下的主界面图 图1-3 机构菜单图1-4 模型树菜单图1-5 工具栏图标图1-5所示的“机构”工具栏图标和图1-3中下拉菜单各选项功能解释如下:
PROE机构仿真之运动分析 关键词:PROE 仿真运动分析重复组件分析连接回放运动包络轨迹曲线 术语 创建机构前,应熟悉下列术语在PROE中的定义: 主体(Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。 连接(Connections) - 定义并约束相对运动的主体之间的关系。 自由度(Degrees of Freedom) - 允许的机械系统运动。连接的作用就是约束主体之间的相对运动,减少系统可能的总自由度。 拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。 动态(Dynamics) - 研究机构在受力后的运动。 执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。 齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。 基础(Ground) - 不移动的主体。其它主体相对于基础运动。 接头(Joints) - 特定的连接类型(例如销钉接头、滑块接头与球接头)。 运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。 环连接(Loop Connection) - 添加到运动环中的最后一个连接。 运动(Motion) - 主体受电动机或负荷作用时的移动方式。 放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。 回放(Playback) - 记录并重放分析运行的结果。 伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。可在接头或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。 LCS - 与主体相关的局部坐标系。LCS 就是与主体中定义的第一个零件相关的缺省坐标系。
PTC/USER 2009 winxos 11-01-28 winxos 11-01-28 Pro/ENGINEER Wildfire 5.0 操作实训
仅供操作实训使用
请勿在本手册上做记录或者将手册带离本次培训 会,以便其他参加者使用。
PTC/USER 2009
winxos 11-01-28 winxos 11-01-28
目录
交互性建模......................................................................................................................... 3 模具件设计效率............................................................................................................... 17 钣金件设计及焊接........................................................................................................... 24 灵活装配........................................................................................................................... 38 仿真教程........................................................................................................................... 49 工程图工作流程和效率................................................................................................... 61 Pro/ENGINEER Manikin..................................................................................................... 74 公差分析........................................................................................................................... 81
Pro/ENGINEER Wildfire 操作实训
Page 1
摘要 使用Pro/E 软件构建活塞机构的三维模型,对模型进行装配,并用Mechanism 模块对活塞机构进行运动仿真,得到活塞的位移、速度、加速度的运动仿真曲线图;并从理论角度运用数理方法建立运动方程,借助Matlab simulink仿真模块对活塞机构进行仿真得到活塞的位移、速度、加速度的理论曲线。 根据Pro/E运动仿真结果分析表明设计的活塞机构满足要求,活塞运动正常;对比Matlab simulink仿真结果表明Pro/E进行模拟比数值理论方法更具优越性。 关键词:Pro/E Simulink 活塞机构运动仿真
ABSTRACT The paper constructs the three-dimensional model of piston mechanism by using Pro/E software ,gets the assembly model , makes the piston mechanism motion simulation by using Mechanism module and obtains the displacement, velocity , acceleration of slider and the motion simulation curve. From a theoretical point of view by means of mathematical methods to establish the motion equation ,and making simulation by means of Matlab Simulink simulation module and obtaining the displacement ,velocity, acceleration curve. According to the Pro/E simulation results show that the piston mechanism design to meet the requirements, the piston motion is normal; Compared with the Matlab Simulink simulation results show that the Pro/E simulation than numerical theory method is more superiority. Key words: Pro/E Simulink Piston mechanism Motion simulation
PROE机构仿真之运动分析 关键词:PROE 仿真运动分析重复组件分析连接回放运动包络轨迹曲线术语 创建机构前,应熟悉下列术语在PROE中的定义: 主体(Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。 连接(Connections) - 定义并约束相对运动的主体之间的关系。 自由度(Degrees of Freedom) - 允许的机械系统运动。连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。 拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。 动态(Dynamics) - 研究机构在受力后的运动。 执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。 齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。 基础(Ground) - 不移动的主体。其它主体相对于基础运动。 接头(Joints) - 特定的连接类型(例如销钉接头、滑块接头和球接头)。 运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。 环连接(Loop Connection) - 添加到运动环中的最后一个连接。 运动(Motion) - 主体受电动机或负荷作用时的移动方式。 放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。 回放(Playback) - 记录并重放分析运行的结果。 伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。可在接头或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。 LCS - 与主体相关的局部坐标系。LCS 是与主体中定义的第一个零件相关的缺省坐
第1章运动仿真 本章重点 应力分析的一般步骤 边界条件的创建 查看分析结果 报告的生成和分析 本章典型效果图 1.1机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Pro/ engineer中“机构”模块是专门用来进行运动仿真和动态分析的模块。PROE的运动仿真与动态分析功能集成在“机构”模块中,包括Mechanism design(机械设
计)和Mechanism dynamics(机械动态)两个方面的分析功能。 使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定义特定运动副,创建能使其运动起来的伺服电动机,来实现机构的运动模拟。并可以观察并记录分析,可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。也可创建轨迹曲线和运动包络,用物理方法描述运动。 使用“机械动态”分析功能可在机构上定义重力,力和力矩,弹簧,阻尼等等特征。可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力和力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。 1.2总体界面及使用环境 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图1-3所示的“机构”下拉菜单,模型树增加了如图1-4所示“机构”一项内容,窗口右边出现如图1-5所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。 图1-1 由装配环境进入机构环境图
接头连接的类型接头连接所用的约束都是能实现特定运动(含固定)的组合约束,包括:销钉、圆柱、滑动杆、轴承、平面、球、6DOF、常规、刚性、焊接,共10种。销钉:由一个轴对齐约束和一个与轴垂直的平移约束组成。元件可以绕轴旋转,具有1个旋转自由度,总自由度为1。轴对齐约束可选择直边或轴线或圆柱面,可反向;平移约束可以是两个点对齐,也可以是两个平面的对齐/配对,平面对齐/配对时,可以设置偏移量。圆柱:由一个轴对齐约束组成。比销钉约束少了一个平移约束,因此元件可绕轴旋转同时可沿轴向平移,具有1个旋转自由度和1个平移自由度,总自由度为2。轴对齐约束可选择直边或轴线或圆柱面,可反向。滑动杆:即滑块,由一个轴对齐约束和一个旋转约束(实际上就是一个与轴平行的平移约束)组成。元件可滑轴平移,具有1个平移自由度,总自由度为1。轴对齐约束可选择直边或轴线或圆柱面,可反向。旋转约束选择两个平面,偏移量根据元件所处位置自动计算,可反向。轴承:由一个点对齐约束组成。它与机械上的“轴承”不同,它是元件(或组件)上的一个点对齐到组件(或元件)上的一条直边或轴线上,因此元件可沿轴线平移并任意方向旋转,具有1个平移自由度和3个旋转自由度,总自由度为4。平面:由一个平面约束组成,也就是确定了元件上某平面与组件上某平面之间的距离(或重合)。元件可绕垂直于平面的轴旋转并在平行于平面的两个方向上平移,具有1个旋转自由度和2个平移自由度,总自由度为3。可指定偏移量,可反向。球:由一个点对齐约束组成。元件上的一个点对齐到组件上的一个点,比轴承连
接小了一个平移自由度,可以绕着对齐点任意旋转,具有3个入旋转自由度,总自由度为3。 6DOF:即6自由度,也就是对元件不作任何约束,仅用一个元件坐标系和一个组件坐标系重合来使元件与组件发生关联。元件可任意旋转和平移,具有3个旋转自由度和3个平移自由度,总自由度为6。刚性:使用一个或多个基本约束,将元件与组件连接到一起。连接后,元件与组件成为一个主体,相互之间不再有自由度,如果刚性连接没有将自由度完全消除,则元件将在当前位置被“粘”在组件上。如果将一个子组件与组件用刚性连接,子组件内各零件也将一起被“粘”住,其原有自由度不起作用。总自由度为0。焊接:两个坐标系对齐,元件自由度被完全消除。连接后,元件与组件成为一个主体,相互之间不再有自由度。如果将一个子组件与组件用焊接连接,子组件内各零件将参照组件坐标系发按其原有自由度的作用。总自由度为0。接头连接类型: 这两个约束用来确定两个平面的相对位置,可设定偏距值,也可反向。定义完后,在不修改对象的情况下可更改类型(匹配常规—插入:选取对象为两个柱面。单一的“插入”构成的自定义组合约束转换为约束连接后,变为只有一个“插入”约束的不完整约束,再转换为接头约束后变为“圆柱”连接。常规—坐标系:选取对象为两个坐标系,与6DOF的坐标系约束不同,此坐标系将元件完全定位,消除了所有自由度。单一的“坐标系”构成的自定义组合约束转换为约束连接后,变为只有一个“坐标系”约束的完整约束,再转换为接头约束后变为“焊接”连接。常规—线上点:选取对象为一个点和
PROE机构仿真之运动分析 关键词:PROE 仿真运动分析重复组件分析连接回放运动包络轨迹曲线术语 创建机构前,应熟悉下列术语在PROE中得定义: 主体(Body)-一个元件或彼此无相对运动得一组元件,主体内DOF=0。 连接(Connections)- 定义并约束相对运动得主体之间得关系。 自由度(DegreesofFreedom) -允许得机械系统运动。连接得作用就是约束主体之间得相对运动,减少系统可能得总自由度。 拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。 动态(Dynamics)-研究机构在受力后得运动。 执行电动机(Force Motor)- 作用于旋转轴或平移轴上(引起运动)得力。 齿轮副连接(GearPairConnection) - 应用到两连接轴得速度约束。 基础(Ground) -不移动得主体。其它主体相对于基础运动。 接头(Joints) - 特定得连接类型(例如销钉接头、滑块接头与球接头)。 运动(Kinematics) -研究机构得运动,而不考虑移动机构所需得力。 环连接(Loop Connection)- 添加到运动环中得最后一个连接。 运动(Motion) -主体受电动机或负荷作用时得移动方式。 放置约束(PlacementConstraint) -组件中放置元件并限制该元件在组件中运动得图元。 回放(Playback)-记录并重放分析运行得结果。 伺服电动机(ServoMotor) - 定义一个主体相对于另一个主体运动得方式。可在接头或几何图元上放置电动机,并可指定主体间得位置、速度或加速度运动。LCS- 与主体相关得局部坐标系。LCS 就是与主体中定义得第一个零件相关得缺
徐州工业职业技术学院 课程设计 题目:基于Pro/E风扇设计与运动仿真 班级:机械131 姓名:李光学 指导教师: 完成日期: 摘要
电风扇是一种常见的家用电器,本次设计以台式电风扇为例,来详细讲述Pro/E设计电风扇的全过程。其外型结构较为复杂,如果用传统的CAD绘图软件设计非常困难,Pro/E 可以轻松解决这个问题,Pro/E软件具有很强大的实体造型、曲面造型、虚拟产品装配仿真、工程图生成等功能。本文主要讲述电风扇外形实体建模、电风扇的组件装配、电风扇的叶片的转动仿真。设计综合运用了拉伸、扫描、混合等实体建模的基本方法;曲面修剪、合并、偏移、实体化等复杂的建模方法;装配的的设计方法用到了无连接口的约束和有连接口的约束。在电风扇的建模设计总体上是采用了自底向上的设计方法,在组件在设计过程中也采用了自顶向下的设计方法。我们在学习电风扇的建模设计过程中,除了学习建模方法外,更重要的是学习这种模型设计思想。 关键词:电风扇、Pro/E、实体建模、装配、运动仿真 Abstract
Electric fan is a common household appliances, this design to desktop electric fan, for example, to expound Pro/E design fan process. Its exterior structure is relatively complex, if use the traditional CAD drawing software design is very difficult, Pro/E can be easy to solve this problem, Pro/E software has very powerful entities modelling, surface modeling, virtual assembling simulation, engineering drawing generation, and other functions. This article mainly described entity modeling, electric fan shape of component assembly, electric fan blade rotation simulation. Design comprehensive use the tensile, scanning, mixing entity modeling the basic method, Surface trim, merger, offset, substantiate complex modeling method, Assembly design method used with a mouth of nonartesian-artesian constraints and connection mouth constraints. The fan modeling design was generally adopted a bottom upward design methods, in the component in the design process also USES a top-down design method. We are studying the fanner modeling design process, besides study modeling method outside, more important is to learn this model design thought. Keywords:electric fan, Pro/E, entity modeling, assembling, movement simulation 一、设计任务 电风扇是一种常见的家用电器,也是我国最早生产和使用的的家
ProE野火运动仿真经典教程 关键词:PROE 仿真运动分析重复组件分析连接回放运动包络轨迹曲线 版权:原创文章,转载请注明出处 机构仿真是PROE的功能模块之一。PROE能做的仿真内容还算比较好,不过用好的兄弟不多。当然真正专做仿真分析的兄弟,估计都用Ansys去了。但是,Ansys研究起来可比PROE 麻烦多了。所以,学会PROE的仿真,在很多时候还是有用的。坛子里关于仿真的教程也有过一些,但很多都是动画,或实例。偶再发放一份学习笔记,并整理一下,当个基础教程吧。希望能对学习仿真的兄弟有所帮助。 术语 创建机构前,应熟悉下列术语在PROE中的定义: 主体(Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。 连接(Connections) - 定义并约束相对运动的主体之间的关系。 自由度(Degrees of Freedom) - 允许的机械系统运动。连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。 拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。 动态(Dynamics) - 研究机构在受力后的运动。 执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。 齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。 基础(Ground) - 不移动的主体。其它主体相对于基础运动。 接头(Joints) - 特定的连接类型(例如销钉接头、滑块接头和球接头)。 运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。 环连接(Loop Connection) - 添加到运动环中的最后一个连接。 运动(Motion) - 主体受电动机或负荷作用时的移动方式。 放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。 回放(Playback) - 记录并重放分析运行的结果。 伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。可在接头或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。 LCS - 与主体相关的局部坐标系。LCS 是与主体中定义的第一个零件相关的缺省坐标系。UCS - 用户坐标系。 WCS - 全局坐标系。组件的全局坐标系,它包括用于组件及该组件内所有主体的全局坐标系。运动分析的定义 在满足伺服电动机轮廓和接头连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,模拟机构的运动。运动分析不考虑受力,它模拟除质量和力之外的运动的所有方面。因此,运动分析不能使用执行电动机,也不必为机构指定质量属性。运动分析忽略模型中的所有动态图元,如弹簧、阻尼器、重力、力/力矩以及执行电动机等,所有动态图元都不影响运动分析结果。 如果伺服电动机具有不连续轮廓,在运行运动分析前软件会尝试使其轮廓连续,如果不能使其轮廓连续,则此伺服电机将不能用于分析。 使用运动分析可获得以下信息: 几何图元和连接的位置、速度以及加速度 元件间的干涉 机构运动的轨迹曲线