粒子影像测速(PIV)技术概述
1.PIV技术介绍
1.1.引言
目前为止,人类对流体力学仍有许多疑难问题,如对湍流、非定常流动等现象了解甚少,而在许多工程应用如飞行器外形设计、燃机燃烧室中的多相流动等中又迫切需要解决这些问题,因而使流场测量问题变得极为重要。
流场测速新方法研究中,至今已发展了激光多普勒测速LDV(Laser Doppler Velocimetry)、粒子影像测速PIV(Particle Image Velocimetry)等技术。LDV的综合性能较高,具有高精度、高分辨率和非接触测量等优点,通常作为仪器标校技术使用,但LDV 只能实现单点测量。PIV技术是一种全场、动态、非接触测量手段,已获得广泛使用,成功应用于风洞、水洞、水槽燃烧及喷射等实验中。PIV研究始于上个世纪80年代,随着光学和计算机图像处理技术的迅猛发展,PIV取得了长足进步,测量精度已与LDV 接近。
1.2.PIV原理
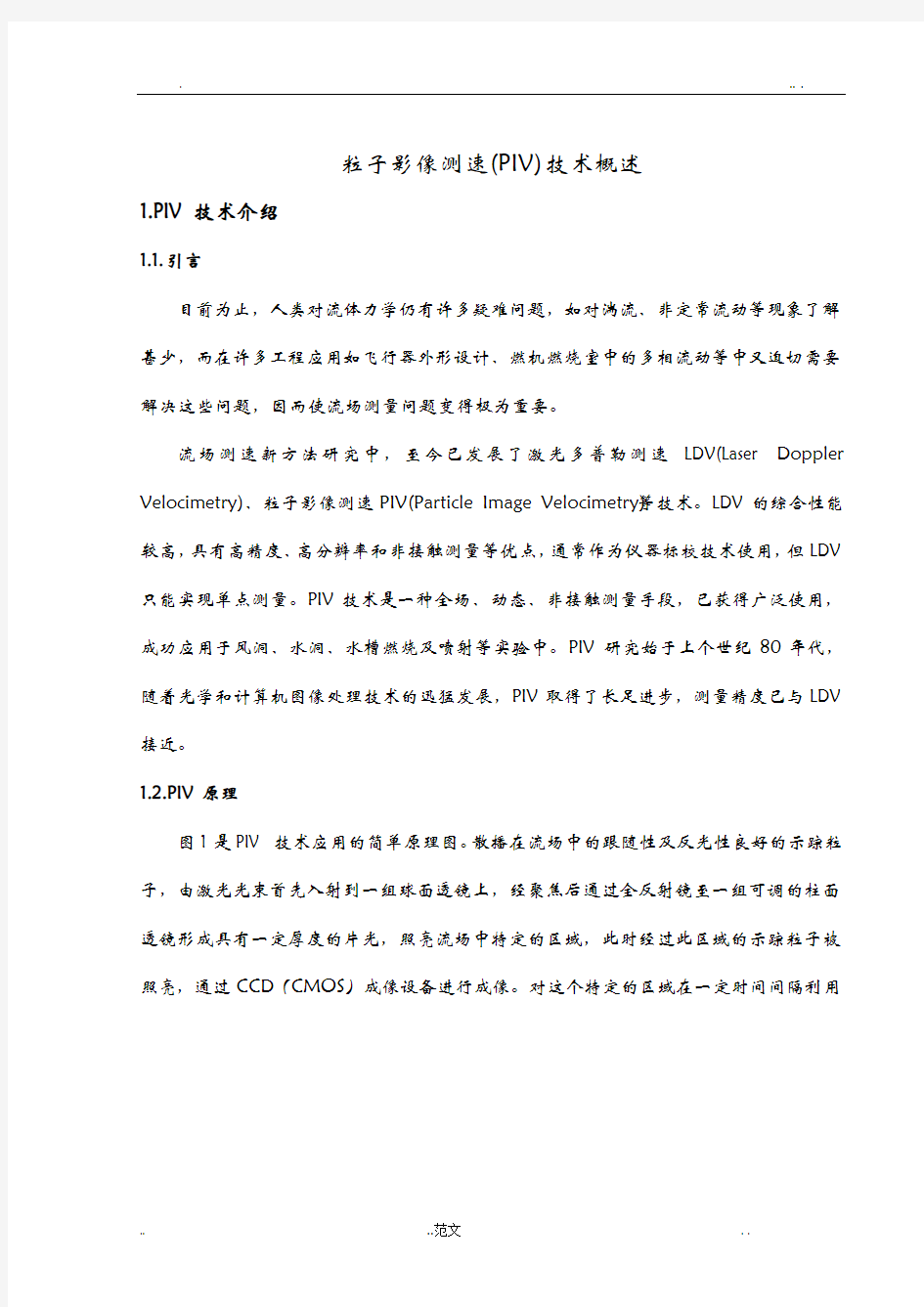
图1是PIV 技术应用的简单原理图。散播在流场中的跟随性及反光性良好的示踪粒子,由激光光束首先入射到一组球面透镜上,经聚焦后通过全反射镜至一组可调的柱面透镜形成具有一定厚度的片光,照亮流场中特定的区域,此时经过此区域的示踪粒子被照亮,通过CCD(CMOS)成像设备进行成像。对这个特定的区域在一定时间间隔利用
图1 PIV简单原理图
激光脉冲连续照亮两次,就能得到粒子在第一次照亮时间t 和第二次照亮时间t’的两个图像,对这两幅图像进行互相关分析,就能得到流场部的二维速度矢量分布。
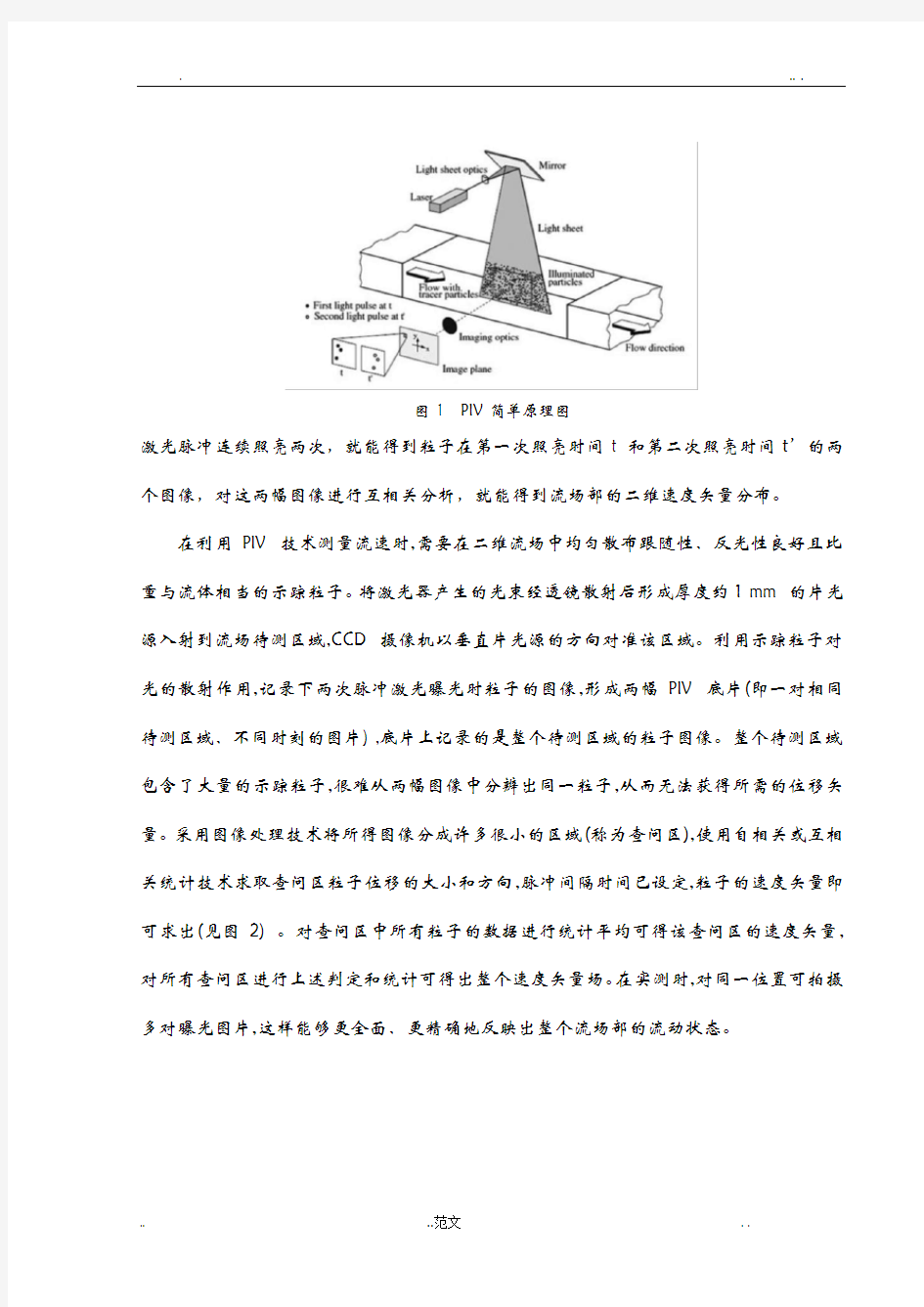
在利用PIV 技术测量流速时,需要在二维流场中均匀散布跟随性、反光性良好且比重与流体相当的示踪粒子。将激光器产生的光束经透镜散射后形成厚度约1 mm 的片光源入射到流场待测区域,CCD 摄像机以垂直片光源的方向对准该区域。利用示踪粒子对光的散射作用,记录下两次脉冲激光曝光时粒子的图像,形成两幅PIV 底片(即一对相同待测区域、不同时刻的图片) ,底片上记录的是整个待测区域的粒子图像。整个待测区域包含了大量的示踪粒子,很难从两幅图像中分辨出同一粒子,从而无法获得所需的位移矢量。采用图像处理技术将所得图像分成许多很小的区域(称为查问区),使用自相关或互相关统计技术求取查问区粒子位移的大小和方向,脉冲间隔时间已设定,粒子的速度矢量即可求出(见图2) 。对查问区中所有粒子的数据进行统计平均可得该查问区的速度矢量,对所有查问区进行上述判定和统计可得出整个速度矢量场。在实测时,对同一位置可拍摄多对曝光图片,这样能够更全面、更精确地反映出整个流场部的流动状态。
图2 PIV测速原理
PIV 测速是基于最直接的流体速度测量方法。在己知的时间间隔Δt ,流场中某一示踪粒子在二维平面上运动,它在x 、y 两个方向的位移是时间t的函数。该示踪粒子所在处流体质点的二维速度可以表示为:
式中,,为流体质点沿x 、y 方向的瞬时速度,,为流体质点沿x 、y 方向的平均速度,Δt为测量的时间间隔。
上式中,当Δt 足够小时,,的大小可以精确地反映,。PIV 技术就是通过测量示踪粒子的瞬时平均速度实现对二维流场的测量。
1.3.PIV系统
PIV 系统框图如图 3 所示,其实现过程一般分为三步:通过硬件设备采集流场图像,应用图像处理算法提取速度信息,显示流场的速度矢量分布。影响PIV 测量的因素众多并相互作用、相互牵制,需综合考虑,实现高精度PIV 测量难度较大。
图3 PIV系统框图
一、流场图像采集。PIV 系统的硬件主要有激光光源、辅助光学元器件、相机、同步器、示踪粒子和图像处理设备如PC 机等。多数PIV 系统仅能截取流场的某个切面进行测量,需采用激光片光源照明流场。早期的相机使用胶片记录粒子图像(Graphic PIV) ,不仅后续处理耗时且繁琐,也不能结合计算机图像处理技术。近年来,随着高分辨率、高速相机的性价比不断提高,数字式CCD 相机已占主导地位(Digital PIV) 。高能、高频脉冲式激光器的应用则要求光源和相机在同步器的控制下配合工作。示踪粒子的选择和布撒是获取流场图像的关键因素。为了使粒子的运动能够代表流场的真实流动,对示踪粒子的直径大小、密度、形状、光散射性能、播撒均匀性及浓度(根据流场中粒子浓度高低可分为不同模式:LSV、PIV 和PTV ,统称为PIV 技术) 等都有要求,保证粒子对流动介质具有较好的跟随性,并获得高质量的粒子图像。在某些特殊场合,可利用流场本身含有的微小颗粒作为示踪粒子。
二、速度信息获取。当得到流场图像后,PIV 在本质上转化为图像处理技术。经过相机标定、滤波等预处理后,通过粒子匹配算法获得粒子在像平面上的位移,进而计算出粒子的运动速度矢量分布。计算粒子在图像上的位移是最关键的环节,也是PIV 研究的难
点。最早采用光学氏条纹法、自相关法等来匹配粒子图像,但本身具有不可克服的缺点。目前, PIV算法一般采用灰度图像互相关法处理粒子图像,粒子匹配率和精度较高。PIV 算法用粒子簇的运动代替点运动,适合于粒子浓度较高、粒子簇速度变化不大的场合。PTV 算法对单颗粒子识别、跟踪并计算位移,粒子匹配率和空间分辨率较低,可通过减小粒子体积来提高空间分辨率,但同时会降低粒子的散射光强。比较常用的PTV 算法有:BICC ,VGT ,SPRING,42FRAM。其他还有正在发展的粒子匹配算法有拓扑图论、神经网络、遗传算法、模糊聚类方法等。
三、速度矢量场显示。经过误配矢量(人工或算法自动) 剔除后,得到最终数据并显示,必要时还可使用插值算法以获得更稠密的速度矢量分布。
1.4.PIV技术的发展
流动测量新问题对PIV技术提出更高要求,促使PIV研究迈向新的高度,在动态围、测量精度、测量时间、粒子布撒技术和图像处理算法等方面仍存在需要研究和改进的地方。当前,PIV技术在以下几个方面继续深化。
一、完善二维PIV。近几年来,常规二维PIV的研究重点是发展高精度的粒子像平面位移估算方法。例如,图像匹配策略和各种提速算法,减小测量误差;采用亚像素定位方法提高位移估计精度,提高粒子像中心定位精度;使用形变窗口提高精度和分辨率。
二、多相流PIV。由于大量多相流动现象的存在,发展多相流PIV成为必然趋势。需要改进普通PIV技术,选择合适的示踪粒子和恰当的照明方式。先转化为单相,利用已有技术分别对单相粒子图像进行处理,分离和转换多相流的粒子图像是关键。
三、微型PIV。实现对微小尺度流动的速度场测量,可满足微机械系统(MEMS)、生物芯片等研究的需要。其原理和普通PIV相同,但在流场照明方式、粒子布撒、图像获取以及匹配算法等方面存在较大差别。
四、三维PIV。主要针对切面三维速度场及某个容积三维速度场的测量。前者的技术较为成熟,后者的难度高于前者,特别是空间三维连续速度场测量技术的难度最大,对诸如非定常、非周期体三维流动研究具有重要现实意义。
2.三维PIV技术
2.1.三维PIV技术简介
当前的许多新课题以三维流动为对象,因而更加迫切需要深入开展三维PIV研究,以更好地揭示流场部复杂的三维结构,更深刻地反映流场的流动机理,从本质上反映流场的性质。
按照光源对流场的照明方式,现有的三维PIV技术可分为两大类:一是对某个切面三维速度的测量(2D-3C PIV,片光照明),目的是在提取切面二维速度分量的同时获得第三个空间速度分量;另一种技术是测量某个容积体流动的三维速度(3D-3C PIV,体积光照明),实现真正意义上的全场三维PIV。可以根据相邻切面的二维速度场,运用三维流动的连续性方程计算出切面法线方向的第三个速度分量,这种方式本质上仍属于二维PIV方法。目前,三维PIV的主要思路是计算粒子的三维空间坐标,经过粒子匹配后,再根据三维空间位移,获得粒子的三维速度矢量。
2.2.2D-3C PIV原理
理论上讲,从不少于两部相机的粒子图像中才能提取第三个速度分量。多数采用两部相机两光轴的构成形式,模仿人眼双目测距原理,根据成像几何关系,计算粒子的空间坐标。
如图4所示,分别表示左右相机的光学中心,f为焦距。P点代表被照明的真实粒子,在三维空间坐标系下的坐标为(),在像平面像素坐标系中的坐标为(u,v)。
图4 2D-3C PIV原理图
几何共线方程(粒子中心、相机光学中心和粒子像中心在一条直线上)是其理论基础,反映了相机像平面坐标与三维空间坐标的映射关系,矩阵表达式为:
简记为。其中,K为像平面坐标向量,是被照明粒子的空间坐标向量。、分别由相机的外部参数决定。首先标定相机,确定出相机的外参数。在式中,若知道粒子的空间坐标和图像坐标,即已知K 和,求M,这是相机的
标定过程。左右相机的标定是分别进行的,所有相机具有和式中相类似的表达式。测量时,K和M已知,求解获得粒子的空间坐标。设粒子在不同时刻的空间坐标为(,,)和(,,),则它的三维速度是:
方向由时刻位置指向时刻位置。
2.2.3D-3C PIV技术
由于相机基于针孔模型,物平面和CCD像平面是聚焦成像关系,离开物平面且位于景深围的粒子在像平面上是像斑图像,之前所述的片光定义的物平面和相机像平面的几何投影关系不再适用。下面简单介绍两种体流动三维速度测量方法。
一、透视体三维PIV技术
图5为透视三维PIV坐标系图,双相机呈正交关系放置。以物平面为参考平面,取一定深度的景深围构成测量区域。对于左相机,透视射线经过光学中心,和参考平面上的像斑,则粒子必位于射线上,具体空间坐标由该射线和平面的交点()确定。同理,该粒子在右相机形成的透视射线和平面的交点为()。理论上讲,这两点应合为一点。实际测量时,因各种误差的存在,使得两条射线不能严格相交。此时可将两射线的最短距离作为和是否匹配的判据。
相机经过标定后,由上述点线面的空间几何关系可推导出粒子的空间坐标。