一、平面二连杆机器人手臂运动学
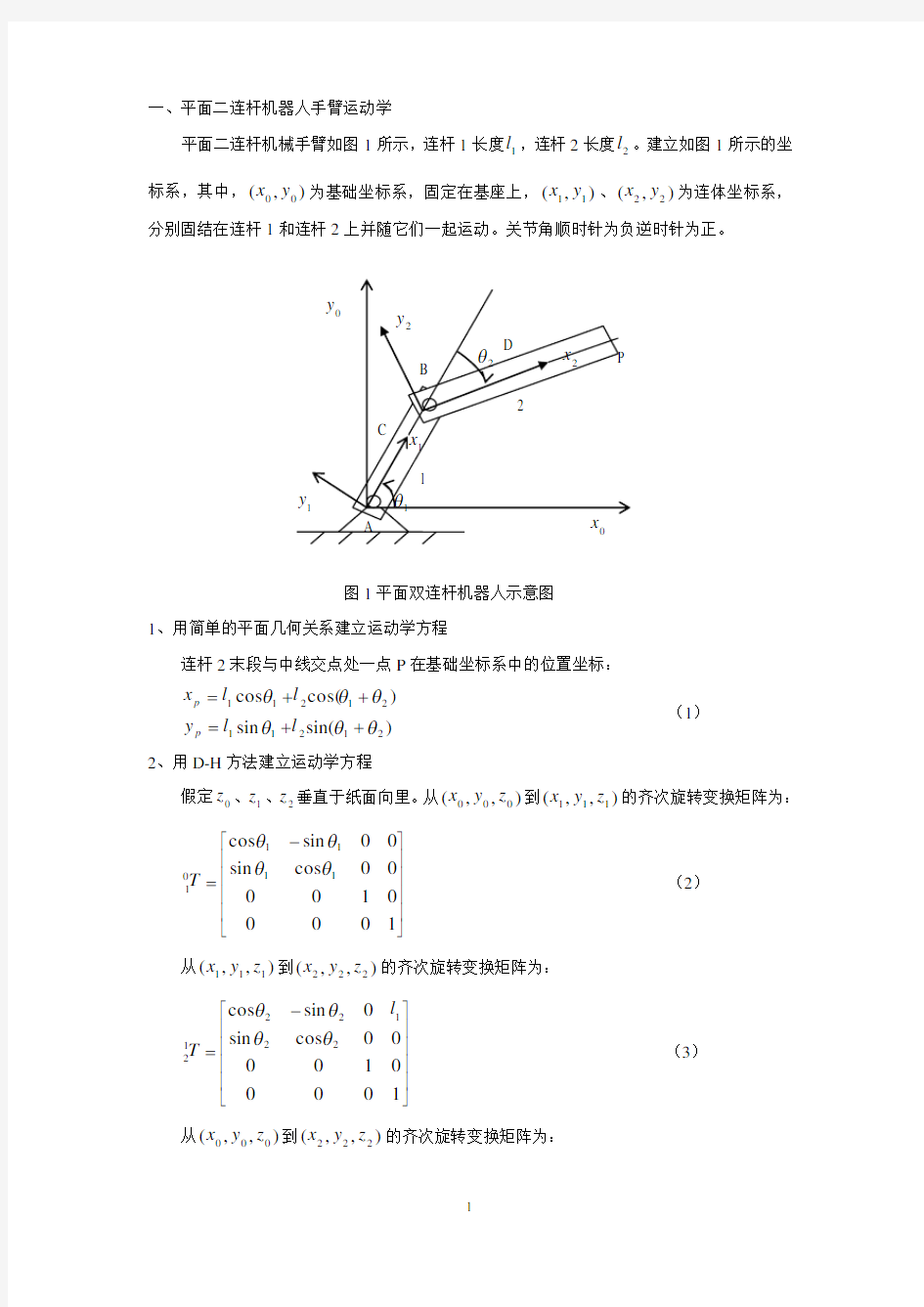
平面二连杆机械手臂如图1所示,连杆1长度1l ,连杆2长度2l 。建立如图1所示的坐标系,其中,),(00y x 为基础坐标系,固定在基座上,),(11y x 、),(22y x 为连体坐标系,分别固结在连杆1和连杆2上并随它们一起运动。关节角顺时针为负逆时针为正。
图1平面双连杆机器人示意图 1、用简单的平面几何关系建立运动学方程
连杆2末段与中线交点处一点P 在基础坐标系中的位置坐标:
)
sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p (1)
2、用D-H 方法建立运动学方程
假定0z 、1z 、2z 垂直于纸面向里。从),,(000z y x 到),,(111z y x 的齐次旋转变换矩阵为:
?????
???????-=10
00
010000cos sin 00sin cos 1
111
01θθ
θθT (2) 从),,(111z y x 到),,(222z y x 的齐次旋转变换矩阵为:
?????
???????-=10
00
010000cos sin 0sin cos 2
212212θθ
θθl T (3) 从),,(000z y x 到),,(222z y x 的齐次旋转变换矩阵为:
?
???
?
???????+++-+=??
???
?
?
?????-?????????????-=?=10000100sin 0)cos()sin(cos 0)sin()cos(1000010000cos sin 0sin cos 1000
010000cos sin 00sin cos 11212111212122122111112
0102θθθθθθθθθθθθθθθθθθl l l T T T (4)
那么,连杆2末段与中线交点处一点P 在基础坐标系中的位置矢量为:
?
??
?
?
???????=????????????++++=?
???
?
????????
????????????+++-+=?=110)sin(sin )cos(cos 10010000100sin 0)cos()sin(cos 0)sin()cos(212112121121121211121212
020p p p z y x l l l l l l l P T P θθθθθθθθθθθθθθθθ (5)
即,
)
sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p (6)
与用简单的平面几何关系建立运动学方程(1)相同。
建立以上运动学方程后,若已知个连杆的关节角21θθ、,就可以用运动学方程求出机械手臂末端位置坐标,这可以用于运动学仿真。
3、平面二连杆机器人手臂逆运动学
建立以上运动学方程后,若已知个机械臂的末端位置,可以用运动学方程求出机械手臂二连杆的关节角21θθ、,这叫机械臂的逆运动学。逆运动学可以用于对机械臂关节角和末端位置的控制。对于本例中平面二连杆机械臂,其逆运动学方程的建立就是已知末端位置
),(p p y x 求相应关节角21θθ、的过程。推倒如下。
(1)问题
)
sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p
已知末端位置坐标),(p p y x ,求关节角21θθ、。 (2)求1θ
由(6)式得到:
2
2
211211)sin ()cos (l l y l x p p =-+-θθ (7) 整理得到:
)sin cos (21112
22122θθp p p p y x l l l y x +=-++ (8)
令
p
p p p
p tg y x θθθcos sin =
= (9)
由(8)式得到:
)sin sin cos (cos cos 211122
2122p p p p p p x l l l y x θθθθθ+=
-++
)cos(cos 2112
22122p p
p p p x l l l y x θθθ-=-++ (10)
由此可解出1θ。
p p p p p p x y arctg x l l l y x +???
?????-++=θθcos 2arccos 12
2
21221 (11)
(3)求2θ 由(6)式得到:
2122122212)]sin([)]cos([l l y l x p p =+-++-θθθθ (12)
整理得到:
)]sin()cos(
[2212122
12222θθθθ+++=-++p p p p y x l l l y x (13) 令
p
p p p
p tg y x θθθcos sin =
= (14)
由(14)式得到:
)
cos(cos 2]
sin )sin(cos )[cos(cos 22122121221
2222p p
p p p p p p p x l x l l l y x θθθθθθθθθθθ-+=
+++=
-++ (15)
由此可解出2θ。
122
1
22222cos 2arccos θθθ-+???
?????-++=p p p p p p x y arctg x l l l y x (16)
二、平面二连杆机器人手臂的速度雅可比矩阵
速度雅可比矩阵的定义:从关节速度向末端操作速度的线性变换。现已二连杆平面机器人为例推导速度雅可比矩阵。
)s i n (s i n )c o s (c o s 2121121211θθθθθθ++=++=l l y l l x p p
上面的运动学方程两边对时间求导,得到下面的速度表达式:
)()cos(cos )()sin(sin 2
12121112
1212111θθθθθθθθθθθθ +?++?=+?+-?-=l l dt
dy l l dt dx p p (17)
把上式写成如下的矩阵形式:
??
??????????++++-+--=??????21
2122121121221211)cos()cos(cos )sin()sin(sin θθθθθθθθθθθθ l l l l l l y x p p (18) 令上式中的末端位置速度矢量X
y
x p p =??????, 关节角速度矢量Θ
=??
???? 21θθ, 矩阵),()cos()cos(cos )sin()sin(sin 2121221211
21221211θθθθθθθθθθθθJ l l l l l l =???
???++++-+--
),(21θθJ 就是速度雅可比矩阵,实现从关节角速度向末端位置速度的转变。(18)式可以写成:
Θ?= ),(2
1θθJ X 速度雅可比矩阵可以进一步写成:
??
????=??
????++++-+--=22211211212212112122121121)cos()cos(cos )sin()sin(sin ),(J J J
l l l l l l J J θθθθθθθθθθθθ (19)
其中,
)
cos()cos(cos )
sin()sin(sin 2122
222121112121221221211111θθθθθθθθθθθθθθ+=??=
++=??=+-=??=+--=??=l y J l l y J l x J l l x J p p p p (20)
由此可知雅可比矩阵的定义:
???
??
?
????????????=????
??=2121
2221
1211
21),(θθθθθθp p p p
J y y x x J J J J (21) 三、平面二连杆机器人手臂的动力学方程
推倒动力学方程的方法很多,各有优缺点。拉格朗日方法思路清晰、不考虑连杆之间的内力,是推倒动力学方程的常用方法。下面推导图1所示的平面双连杆机器人的动力学方程。图1中所示连杆均为均质杆,其转动惯量分别是1I 和2I 。 1、求两连杆的拉格朗日函数 (1)求系统总动能
连杆1的动能为:
21211212112116
1)31(212
1θθθ l m l m I K A ===
(21)
求连杆2质心D 处的线速度:对连杆2质心位置求导得到其线速度。连杆2质心位置
为:
)
sin(2
1
sin )
cos(2
1
cos 2121121211θθθθθθ++=++=l l y l l x D D (22)
连杆2质心速度为:
)()cos(21cos )()sin(2
1sin 212121112
1212111θθθθθθθθθθθθ +?++?=+?+-?-=l l Y l l x D D (23)
21221222222212212221222)cos 2
1(41)cos 41(θθθθθθ l l l l l l l l y x V D D D +++++=+=
(24)
连杆2的动能:
2
122122222222212212
2212212212222222122122212221222222212)cos 32(2161)cos 31(21])cos 21(41)cos 41[(21))(121(2121)(21θθθθθθθθθθθθθθθθ l l l m l m l l l l m l l l l l l l l m l m V m I K D D +++++=+++++++=++=
(25) 系统总动能:
212212222222222122122222112122
122122222222212212
22122
1)cos 2131(61)cos 21616121()cos 32(2161)cos 31(21θθθθθθθθθθθθ l l m l m l m l l m l m l m l m l l l m l m l l l l m K K K ++++++=+++++=
+= (26) (2)求系统总势能 系统总势能为:
))sin(2
1
sin (sin 21212112111θθθθ+++=l l g m gl m P (27)
(3)求拉格朗日函数
)]sin(2
1
sin [sin 21)cos 2131(61)cos 21616121(21211211121221222222222212212222211212θθθθθθθθθθ++--++++++=-=l l g m gl m l l m l m l m l l m l m l m l m P
K L (28) (4)列写动力学方程
按照拉格朗日方程,对应关节1、2的驱动力矩分别为:
22
2111θθτθθτ??-????=
??-????=
L L t L
L t (29)
22212222122122222112121
)c o s 2131()c o s 3131(θθθθθ l l m l m l l m l m l m l m L +++++=??
22
221221221222212222122122222112121
sin 2
1sin )cos 2131()cos 3131(θθθθθθθθθθ l l m l l m l l m l m l l m l m l m l m L t --+++++=???? )c o s (2
1c o s )21(212211211θθθθ+-+-=??gl m gl m m L )cos(2
1cos )21(sin 21sin )cos 2
131()cos 3131(2
12211212222122122122
2212222122122222112121θθθθθθθθθθθθτ++++--+++++=gl m gl m m l l m l l m l l m l m l l m l m l m l m (30)
同理:
1221222222222)cos 2131(3
1θθθθ l l m l m l m L ++=?? 2
122122222122122222
sin 2131)cos 2131(θθθθθθθ l l m l m l l m l m L t -++=???? )cos(2
1sin 21sin 212
1222122122122122θθθθθθθθ+---=??gl m l l m l l m L )cos(2
1sin 2
13
1)cos 2
13
1
(2
1222122122222122122222θθθθθθθτ+++++=gl m l l m l m l l m l m (31)
联合(30)、(31)式,将动力学方程写成如下矩阵形式:
????
?
?????+++++????????????-+??????????
?
?????-+??????????
??????+++++=??????)
cos(21)cos(21cos )21(000sin 0sin 21
sin 21031cos 2131cos 2
131cos 3131212221221121212122122221221222122122
2221222222122
22221222221121221θθθθθθθθθθθθθθθθθθθττgl m gl m gl m m l l m l l m l l m l m l l m l m l l m l m l l m l m l m l m (32)
四、平面二连杆机器人手臂的轨迹规划
轨迹规划就是已知起点和终点的位置速度加速度等参数确定中间点的相应参数的过程。轨迹规划是机器人完成规定任务所必需的。它分为关节空间的轨迹规划和直角坐标空间的轨迹规划、以及基于动力学的轨迹规划等几种类型。
关节空间的轨迹规划就是已知某连杆起点和终点的角位置角速度角加速度等参数确定中间点的相应参数的过程。如图所示,一两自由度机械手,已知两连杆起点和终点的关节角,确定中间位置的关节角。(1)非归一化和归一化问题(2)末端位置的轨迹、关节空间轨迹规划的缺点。
三次多项式轨迹规划
举例:要求一个5轴机器人的第一关节在5秒之内从初始角30度运动到终端角75度,用三次多项式计算在第1、2、3、4秒时的关节角。
五次多项式轨迹规划
抛物线过渡的线性运动轨迹规划(略)
具有中间点以及用抛物线过渡的线性运动轨迹规划(略)
高次多项式运动轨迹规划(略)
直角坐标空间的轨迹规划(1)所有用于关节空间的轨迹规划方法都可以用于直角坐标空间轨迹规划;(2)直角坐标轨迹规划必须不断进行逆运动学运算,以便及时得到关节角。这个过程可以归纳为以下计算循环:
(a)将时间增加一个增量;
(b)利用所选择的轨迹函数计算出手的位姿;
(c)利用逆运动学方程计算相应的关节变量;
(d)将关节变量信息送给控制器;
(e)返回到循环的开始。
五、二连杆机器人的控制
一、平面二连杆机器人手臂运动学 平面二连杆机械手臂如图1所示,连杆1长度1l ,连杆2长度2l 。建立如图1所示的坐标系,其中,),(00y x 为基础坐标系,固定在基座上,),(11y x 、),(22y x 为连体坐标系,分别固结在连杆1和连杆2上并随它们一起运动。关节角顺时针为负逆时针为正。 图1平面双连杆机器人示意图 1、用简单的平面几何关系建立运动学方程 连杆2末段与中线交点处一点P 在基础坐标系中的位置坐标: ) sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p (1) 2、用D-H 方法建立运动学方程 假定0z 、1z 、2z 垂直于纸面向里。从),,(000z y x 到),,(111z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 00sin cos 1 111 01θθ θθT (2) 从),,(111z y x 到),,(222z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 0sin cos 2 212212 θθ θθl T (3) 从),,(000z y x 到),,(222z y x 的齐次旋转变换矩阵为:
? ???? ???????+++-+=?? ??? ? ? ?? ???-?????????????-=?=10000100sin 0)cos()sin(cos 0)sin()cos( 1000010 000cos sin 0sin cos 1000 010000cos sin 00sin cos 1121211121212212 2111 1120102θθθθθθθθθθθθθθθθ θθl l l T T T (4) 那么,连杆2末段与中线交点处一点P 在基础坐标系中的位置矢量为: ? ?? ? ? ???????=????????????++++=? ? ? ?? ? ?????????????? ?? ???+++-+=?=110)sin(sin )cos( cos 10010000100sin 0)cos()sin(cos 0)sin()cos( 212112121121121211121212 020p p p z y x l l l l l l l P T P θθθθθθθθθθθθθθθθ (5) 即, ) sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p (6) 与用简单的平面几何关系建立运动学方程(1)相同。 建立以上运动学方程后,若已知个连杆的关节角21θθ、,就可以用运动学方程求出机械手臂末端位置坐标,这可以用于运动学仿真。 3、平面二连杆机器人手臂逆运动学 建立以上运动学方程后,若已知个机械臂的末端位置,可以用运动学方程求出机械手臂二连杆的关节角21θθ、,这叫机械臂的逆运动学。逆运动学可以用于对机械臂关节角和末端位置的控制。对于本例中平面二连杆机械臂,其逆运动学方程的建立就是已知末端位置 ),(p p y x 求相应关节角21θθ、的过程。推倒如下。 (1)问题 ) sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p 已知末端位置坐标),(p p y x ,求关节角21θθ、。 (2)求1θ
专题综述 课程名称工业自动化专题 题目名称工业机器人的运动轨迹学生学院____ _ 自动化________ 专业班级___ _ _ 学号 学生姓名___ _ _ 指导教师_____ _____ 2013 年 6月 27日
工业机器人的运动轨迹综述 【摘要】:随着知识经济时代的到来,高技术已成为世界各国争夺的焦点,机器人技术作为高技术的一个重要分支普遍受到了各国政府的重视。自此,多种不同的研究方向都在工业机器人实时高精度的路径跟踪来实现预期目的。而工业机器人的运动轨迹又是重中之重,在得到反馈信息之后,如何作出应答,并且实时检查轨迹与所计算出的轨迹是否吻合,为此也要进行追踪与动作修正。 【关键词】:工业机器人,视觉,路径跟踪,轨迹规划,高精度 1.机器人视觉,运动前的准备 实际的工业现场环境复杂,多种因素都有可能导致系统在运行过程中产生一定的偏差、测量精度降低,引起误差的原因主要有温度漂移和关节松动变形等,使测量模型的参数值改变从而导致定位误差增大,因此需要定期对工业机器人视觉测量系统进行精确的校准,从而实现精确定位和视觉测量。更少不得必要的优化。 1.1基于单目视觉的工业机器人运动轨迹准确度检测 建立的工业机器人单目视觉系统,整个系统主要由单目视觉单元,监控单元和机器人执行单元三大单元组成。单目视觉单元为一台固定在机器人上方的CCD摄像机,负责摄取工作环境中的目标并存入图像采集卡缓冲区;监控单元负责监控各工作站的当前状态,并完成对存储图像进行相关处理的工作,达到识别定位目标的目的;执行单元负责驱动机械手实施抓取操作。 1.2基于双目视觉的工业机器人运动轨迹准确度检测 以立体视觉理论为基础,研究了基于空间直线的二维投影面方程。根据投影面的空间解析几何约束关系,建立基于直线特征匹配的双目视觉误差测量的数学模型。在该模型基础上采用将两台摄像机固定于工业机器人末端的方案.对关节型工业机器人运动轨迹的准确度进行了检测。结果表明,该检测方法简单实用,基本上可以满足工业机器人CP性能检测的要求。 1.3一种面向工业机器人智能抓取的视觉引导技术研究 为实现工业机器人自主识别并抓取指定的目标,提出了一种基于计算机视觉引导的解决 方法。该方法利用指定目标的3D数据模型,以及由两台或者多台CCD摄像机从工作场景中不同角度获;取到的数字图像,经过目标姿态估算、投影计算并生成投影图像,再利用投影
机器人的动力学控制 The dynamics of robot control 自123班 庞悦 3120411054
机器人的动力学控制 摘要:机器人动力学是对机器人机构的力和运动之间关系与平衡进行研究的学科。机器人动力学是复杂的动力学系统,对处理物体的动态响应取决于机器人动力学模型和控制算法。机器人动力学主要研究动力学正问题和动力学逆问题两个方面,需要采用严密的系统方法来分析机器人动力学特性。本文使用MATLAB 来对两关节机器人模型进行仿真,进而对两关节机器人进行轨迹规划,来举例说明独立PD 控制在机器人动力学控制中的重要作用。 Abstract: for the robot dynamics is to study the relation between the force and movement and balance of the subject.Robot dynamics is a complex dynamic system, on the dynamic response of the processing object depending on the robot dynamics model and control algorithm.Kinetics of robot research dynamics problem and inverse problem of two aspects, the need to adopt strict system method for the analysis of robot dynamics.This article USES MATLAB to simulate two joints, the robot, in turn, the two joints, the robot trajectory planning, to illustrate the independent PD control plays an important part in robot dynamic control. 一 动力学概念 机器人的动力学主要是研究动力学正问题和动力学逆问题两个方面,再进一步研究机器人的关节力矩,使机器人的机械臂运动到指定位臵,其控制算法一共有三种:独立PD 控制,前馈控制和计算力矩控制,本文主要介绍独立PD 控制。 动力学方程:)()(),()(q G q F q q q C q q M +++=? ????τ
全球全年太阳视运动轨迹图解析 很多人都对太阳视运动轨迹不是很清晰,它牵涉到影子朝向、太阳高度角以及地方时的计算等知识,所以为大家所关注,这里就对全球任何纬度上全年任何时刻太阳视运动一天之内的轨迹图进行比较详细的解析,希望对大家的理解有所帮助。同时如有不对之处请各位指正,不胜感激。 一、前提知识储备 太阳视运动轨迹跟太阳直射点的位置有直接的关系,所以要把太阳视运动轨迹弄清楚,首先要把教材上二分二至日太阳照射图弄明白。 图1图2 从上面三个图要清楚以下这些知识点: 1、与晨昏线相交的纬线上,日出日落时太阳高度角为零;反之没有与晨昏线相交的纬线上,日出日落时太阳高度角不为零,如图1北极圈以北的纬线上,图3南极圈以南的纬线上; 2、上面三个图既反映了地方时为12时的太阳高度角大小,也反映了地方时为0时的太阳高度角大小;换个角度说,上面三个图既反映了地方时为12时的太阳视方位,也反映了地方时为0时的太阳视方位。其中地方时为0时的太阳视方位和太阳高度角对于在极昼范围以内的地方有意义; 3、有人有这样的误区“既然太阳光为平行光线,所以全球任何地点的太阳视方位是相同的。”,这个观点错在没有考虑“地球表面为曲面”的因素。 图4 图5 通过比较图4和图5,相信可以走出上面提到的误区。 二、把握三种情况六个区域 由于太阳视运动轨迹跟太阳直射点的关系,所以我们只分析太阳直射赤道、北半球、南半球这三种情况即可。 六个区域是根据太阳视运动轨迹的不同,把地球表面分为六个区域,分别是:赤道、直射点与刚好出现极昼的纬线圈之间(为了方便,以下简称极昼圈,反之简称极夜圈)、直射点与极夜圈之间、极昼圈、极昼圈与极点之间、极点。
国防科学技术大学 硕士学位论文 仿人机器人运动学和动力学分析 姓名:王建文 申请学位级别:硕士 专业:模式识别与智能系统 指导教师:马宏绪 20031101
能力;目前,ASIMO代表着仿人机器人研究的最高水平,见图卜2。2000年,索尼公司也推出了自己研制的仿人机器人SDR一3X,2002年又研制出了SDR一4X,见图卜3。日本东京大学也一直在进行仿人机器人的研究,与Kawada工学院合作相继研制成功了H5、H6和H7仿人机器人,其中H6机器人高1.37米,体重55公斤,具有35个自由度,目前正在开发名为Isamu的新一代仿人机器人,其身高1.5米,体重55公斤,具有32个自由度。日本科学技术振兴机构也在从事PINO机器人的研究,PINO高0.75米,采用29个电机驱动,见图卜4。日本Waseda大学一直在从事仿人机器人研究计划,研制的wL系列仿人机器人和WENDY机器人在机器人界有很大的影响,至今已投入100多万美元,仍在研究之中。Tohoku大学研制的Saika3机器人高1.27米,重47公斤,具有30个自由度。美国的MIT和剑桥马萨诸塞技术学院等单位也一直在从事仿人机器人研究。德国、英国和韩国等也有很多单位在进行类似的研究。 图卜1P2机器人图卜2ASIMO机器人图1.3SDR-4X机器人图1-4PINO机器人 图卜5第一代机器人图l-6第二代机器人图1.7第三代机器人图1—8第四代机器人 在国家“863”高技术计划和自然科学基金的资助下,国内也开展了仿人机器人的研究工作。目前,国内主要有国防科技大学、哈尔滨工业大学和北京理工大学等单位从事仿人机器人的研究。国防科技大学机器人实验室研制机器人已有10余年的历史,该实验室在这期间分四阶段推出了四代机器人,其中,2000年底推出的仿人机器入一“先行者”一是国内第一台仿人机器人。2003年6月,又成功研制了一台具有新型机械结构和运动特性的仿人机器人,这台机器人身高1.55米,体重63.5公斤,共有36个自由度,脚踝有力 第2页
精心整理 一、平面二连杆机器人手臂运动学 平面二连杆机械手臂如图1所示,连杆1长度1l ,连杆2长度2l ,连杆3长度为3l 。建立如图1所示的坐标系,其中,),(00y x 为基础坐标系,固定在基座上,),(11y x 、),(22y x 、33(,)x y 为连体坐标系,分别固结在连杆1、连杆2、连杆3上并随它们一起运动。关节角顺时针为负逆时针为正。 1 θ 图11112123123p p x y 2、用D-H 方法建立运动学方程 假定0z 、1z 、2z 垂直于纸面向外。从),,(000z y x 到),,(111z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 00sin cos 1 11101 θθ θθT (2)
从),,(111z y x 到),,(222z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 0sin cos 2 212212θθ θθl T (3) 从222(,,)x y z 到333(,,)x y z 的齐次旋转变换矩阵为: 33212cos sin 0l T θθ-????=从(003T =003P =结论:(6)与用简单的平面几何关系建立运动学方程(1)相同。 补充:正解用于仿真,逆解用于控制 建立以上运动学方程后,若已知个连杆的关节角123θθθ、、,就可以用运动学方程求出机械手臂末端位置坐标,这可以用于运动学仿真。 3、平面二连杆机器人手臂逆运动学 二、平面二连杆机器人手臂的速度雅可比矩阵 速度雅可比矩阵的定义:从关节速度向末端操作速度的线性变换。现已二连杆平面机器人为例推导速度雅可比矩阵。 上面的运动学方程两边对时间求导,得到下面的速度表达式:
全球全年太阳视运动轨迹图解析 很多人都对太阳视运动轨迹不是很清晰,它牵涉到影子朝向、太阳高度角以 及地方时的计算等知识,所以为大家所关注,这里就对全球任何纬度上全年任何 时刻太阳视运动一天之内的轨迹图进行比较详细的解析,希望对大家的理解有所 帮助。同时如有不对之处请各位指正,不胜感激。 一、前提知识储备 太阳视运动轨迹跟太阳直射点的位置有直接的关系,所以要把太阳视运动轨 迹弄清楚,首先要把教材上二分二至日太阳照射图弄明白。 从上面三个图要清楚以下这些知识点: 1、与晨昏线相交的纬线上,日出日落时太阳高度角为零;反之没有与晨昏线相 交的纬线上,日出日落时太阳高度角不为零,如图 1 北极圈以北的纬线上, 图 3 南极圈以南的纬线上; 2、上面三个图既反映了地方时为 12 时的太阳高度角大小,也反映了地方时为 0 时的太阳高度角大小;换个角度说,上面三个图既反映了地方时为 12 时的太 阳视方位,也反映了地方时为 0 时的太阳视方位。其中地方时为 0 时的太阳 视方位和太阳高度角对于在极昼范围以内的地方有意义; 3、有人有这样的误区“既然太阳光为平行光线,所以全球任何地点的太阳视方 位是相同的。”,这个观点错在没有考虑“地球表面为曲面”的因素。 通过比较图 4 和图 5 ,相信可以走出上面提到的误区。 二、把握三种情况六个区域 由于太阳视运动轨迹跟太阳直射点的关系,所以我们只分析太阳直射赤道、 北半球、南半球这三种情况即可。 六个区域是根据太阳视运动轨迹的不同,把地球表面分为六个区域,分别是: 赤道、直射点与刚好出现极昼的纬线圈之间(为了方便,以下简称极昼圈,反之 简称极夜圈)、直射点与极夜圈之间、极昼圈、极昼圈与极点之间、极点。 N 图3
平面二自由度机械臂动力学分析 [摘要] 机器臂是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,这里主要对平面二自由度机械臂进行动力学研究。本文采用拉格朗日方程在多刚体系统动力学的应用方法分析平面二自由度机械臂的正向动力学。经过研究得出平面二自由度机械臂的动力学方程,为后续更深入研究做铺垫。 [关键字] 平面二自由度 一、介绍 机器人是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,简化解的过程,最大限度地减少工业机器人动力学在线计算的时间是一个受到关注的研究课题。 机器人动力学问题有两类: (1) 给出已知的轨迹点上的,即机器人关节位置、速度和加速度,求相应的关节力矩向量Q r。这对实现机器人动态控制是相当有用的。 (2) 已知关节驱动力矩,求机器人系统相应的各瞬时的运动。也就是说,给出关节力矩向量τ,求机器人所产生的运动。这对模拟机器人的运动是非常有用的。 二、二自由度机器臂动力学方程的推导过程 机器人是结构复杂的连杆系统,一般采用齐次变换的方法,用拉格朗日方程建立其系统动力学方程,对其位姿和运动状态进行描述。机器人动力学方程的具体推导过程如下: (1) 选取坐标系,选定完全而且独立的广义关节变量θr ,r=1, 2,…, n。 (2) 选定相应关节上的广义力F r:当θr是位移变量时,F r为力;当θr是角度变量时, F r为力矩。 (3) 求出机器人各构件的动能和势能,构造拉格朗日函数。 (4) 代入拉格朗日方程求得机器人系统的动力学方程。 下面以图1所示说明机器人二自由度机械臂动力学方程的推导过程。
第八讲 太阳视运动轨迹图的判读方法与技巧 【知识总结】 太阳视运动轨迹图是以观测点为中心,目视太阳在天球上运行所形成的轨迹示意图。它能直观地反映出某地全年正午太阳高度、昼夜长短的变化,也能反映某地全年日出日落方向的变化。 一、方向的判读(通常指地平圈上方向的判读) (1)可通过太阳的升落先判断东西方向,再利用与普通地图上方向的判读方法“上北下南, 左西右东”来定出方向坐标。 例:读图1中太阳在不同节气的视运动图,A 点位于观测者的 方。 判断方法:①根据地球的自转可知太阳的视运动方向是东升西 落,因此可以确定地平面中东西方向,如图2;②根据在地平面上 方向判断是“上北下南、左西右东”,然后在把十字架中的东西方 向与图2中的东西方向指向一致,就可以确定南北方向了。如图3。 (2)已知观测点位于南半球或北半球时,可根据正午太阳的位置来 判断南北方向。 例:图5为北半球某地太阳视运动图,请在图中地平面上标出方向及用箭头画出太阳运动的轨迹。
判断方法:①因为此地 在北半球,所以正午的太阳主要在南方。在图6中我们可以发现,图5中的正午的太阳一直在南方,由此可以确定地平面上的南北方向。②根据在地平面上方向判断是“上北下南、左西右东”,然后在把十字架中的南北方向与图6中的南北方向一致,就可以确定东西方向了。根据地球的自转可知太阳的视运动方向是东升西落,因此可以确定太阳视运动的升落方位,如图7。 二、观测点位于南北半球的判读⑴若正午太阳高度最高时太阳上中天的位置位于观测点之南,则观测点位于北半球;⑵若正午太阳高度最高时太阳上中天的位置位于观测点之北,则观测点位于南半球; 三、正午太阳高度的判读连接正午时太阳所在位置(即太阳上中天的位置)与观测点之间的连线,与南北向连线的夹角,即为观测点所在纬线此日的正午太阳高度(取锐角或直角)。 四、昼夜长短的判读太阳视运动轨迹在地平圈以上弧长的变化,即表示昼长的变化。⑴若此轨迹为优弧,则表示观测点所在纬线此时昼长夜短;⑵若此轨迹为劣弧,则表示观测点所在纬线此时昼短夜长;⑶若轨迹圆心恰好为观测点,则表示观测点所在纬线此时昼夜平分;⑷若太阳视运动轨迹在地平圈以上是一个完整的圆,则表示观测点所在纬线此时出现极昼(如果该圆与地平圈平行,表示观测点所在极点;如果该圆与地平圈相切,表示观测点所在纬度为当日出现极昼的最大范围处;如果该圆与地平圈的位置关系是既不相切又不平行,表示观测点所在纬度介于极点和出现极昼的最大范围处的纬度之间)。 五、二分二至的判读⑴若观测点位于北半球,则太阳视运动轨迹最长时为夏至,最短时为冬至,轨迹圆心在观测点时为春秋分;⑵若观测点位于南半球,则太阳视运动轨迹最长时为冬至,最短时为夏至,轨迹圆心在观测点时为春秋分;⑶若观测点位于赤道上,则正午太阳高度最大时上中天位置在观测点之北的为夏至,在观测点之南的为冬至,正午太阳高度最大(90°)时为春秋分。 六、日出日落方向的判读:在未出现极昼或极夜现象的纬线上(即太阳视运动轨迹与地平圈相交),无论在北半球还是南半球,日出日落方向的变化规律如下:太阳直射北半球时日出日落都偏北(太阳从东北升起西北落下),太阳直射南半球时日出日落都偏南(太阳从东南升起西南落下),太阳直射赤道是不变化(太阳从正东升起正西落下)。 正好出现极昼的地区,北极圈以北地区表现为正北升,正北落,南极圈以南表现为正南升,正南落(升落在同一地点)。北极点从地平面向上看,太阳逆时针在地平面上旋转;南极点从地平面向上看,太阳顺时针在地平面上旋转。
第六章 机器人运动学及动力学 6.1 引论 到现在为止我们对操作机的研究集中在仅考虑动力学上。我们研究了静力位置、静力和速度,但我们从未考虑过产生运动所需的力。本章中我们考虑操作机的运动方程式——由于促动器所施加的扭矩或作用在机械手上的外力所产生的操作机的运动之情况。 机构动力学是一个已经写出很多专著的领域。的确,人们可以花费以年计的时间来研究这个领域。显然,我们不可能包括它所应有的完整的内容。但是,某种动力学问题的方程式似乎特别适合于操作机的应用。特别是,那种能利用操作机的串联链性质的方法是我们研究的天然候选者。 有两个与操作机动力学有关的问题我们打算去解决。向前的动力学问题是计算在施加一 组关节扭矩时机构将怎样运动。也就是,已知扭矩矢量τ,计算产生的操作机的运动Θ、Θ 和Θ 。这个对操作机仿真有用,在逆运动学问题中,我们已知轨迹点Θ、Θ 和Θ ,我们欲求出所需要的关节扭矩矢量τ。这种形式的动力学对操作机的控制问题有用。 6.2 刚体的加速度 现在我们把对刚体运动的分析推广到加速度的情况。在任一瞬时,线速度矢量和角速度矢量的导数分别称为线加速度和角加速度。即 B B Q Q B B Q Q 0V ()V ()d V V lim dt t t t t t ?→+?-==? (6-1) 和 A A Q Q A A Q Q 0()()d lim dt t t t t t ?→Ω+?-ΩΩ=Ω=? (6-2) 正如速度的情况一样,当求导的参坐标架被理解为某个宇宙标架{}U 时我们将用下面的记号 U A AORG V V = (6-3) 和 U A A ω=Ω (6-4)
6.2.1 线加速度 我们从描述当原点重合时从坐标架{}A 看到的矢量B Q 的速度 A A B A A Q B Q B B V V B R R Q =+Ω? (6-5) 这个方程的左手边描述A Q 如何随时间而变化。所以,因为原点是重合的,我们可以重写(6-5)为 A A B A A B B Q B B d ()V dt B B R Q R R Q =+Ω? (6-6) 这种形式的方程式当推导对应的加速度方程时特别有用。 通过对(6-5)求导,我们可以推出当{}A 与{}B 的原点重合时从{}A 中看到的B Q 的 加速度表达式 A A B A A A A Q B Q B B B B d d V (V )()dt dt B B R R Q R Q =+Ω?+Ω? (6-7) 现在用(6-6)两次── 一次对第一项,一次对最后一项。(6-7)式的右侧成为: A B A A A A B Q B B Q B B A A A A B B Q B B V () +Ω?+Ω?+Ω?+Ω? B B B B R R V R Q R V R Q (6-8) 把相同两项合起来 A B A A A A B Q B B Q B B A A A B B B V 2 () +Ω?+Ω?+Ω?Ω? B B B R R V R Q R Q (6-9) 最后,为了推广到原点不重合的情况,我们加上一项给出{}B 的原点的线加速度的项,得到下面的最后的一般公式 A B A A A A BORG B Q B B Q B B A A A B B B V 2 () ++Ω?+Ω?+Ω?Ω? A B B B V R R V R Q R Q (6-10) 对于我们将在本章上考虑的情况,我们总是有B Q 为不变,或 B Q Q V 0== B V (6-11) 所以,(6-10)简化为 A A A A A A Q BORG B B B B B V ()=+Ω?Ω?+Ω? A B B V R Q R Q (6-12) 我们将用这一结果来计算操作机杆件的线加速度。 6.2.2 角加速度 考虑{}B 以A B Ω相对于{}A 转动的情况,而{}C 以B C Ω相对于{}B 转动。为了计算 A C Ω我们把矢量在坐标架{}A 中相加
全球全年太阳视运动轨迹图解析 2009-05-14 08:50:25| 分类:地理学习技巧| 标签:|字号大中小订阅 注:有同学对于《3年高考2年模拟》第31页日出日落方位的总结不是很明白,实际上这就涉及到大阳视运动的问题。摘录的文章用图文详细阐述了太阳视运动轨迹图,以及日出日落方位的问题,其最后的结论和教材上的是一致的。希望通过这篇文章,能更好地理解这个问题。地球运动这一章应该是地理这门学科当中难度较大的,各地高考基本上每年都有,分值4-8分左右,难度可上可下,特别能考查能力。应当重视。 全球全年太阳视运动轨迹图解析 很多人都对太阳视运动轨迹不是很清晰,它牵涉到影子朝向、太阳高度角以及地方时的计算等知识,所以为大家所关注,这里就对全球任何纬度上全年任何时刻太阳视运动一天之内的轨迹图进行比较详细的解析,希望对大家的理解有所帮助。同时如有不对之处请各位指正,不胜感激。 一、前提知识储备 太阳视运动轨迹跟太阳直射点的位置有直接的关系,所以要把太阳视运动轨迹弄清楚,首先要把教材上二分二至日太阳照射图弄明白。 从上面三个图要清楚以下这些知识点: 1、与晨昏线相交的纬线上,日出日落时太阳高度角为零;反之没有与晨昏线相交的纬线上,日出日落时太阳高度角不为零,如图1北极圈以北的纬线上,图3南极圈以南的纬线上; 2、上面三个图既反映了地方时为12时的太阳高度角大小,也反映了地方时为0时的太阳高度角大小;换个角度说,上面三个图既反映了地方时为12时的太阳视方位,也反映了地方时为0时的太阳视方位。其中地方时为0时的太阳视方位和太阳高度角对于在极昼范围以内的地方有意义; 3、有人有这样的误区“既然太阳光为平行光线,所以全球任何地点的太阳视方位是相同的。”,这个观点错在没有考虑“地球表面为曲面”的因素。
机器人运动学知识介绍 收藏 21:53|发布者: dynamics|查看数: 1125|评论数: 2| 来自: 东方早报 摘要: 现在你可能正拿着一本书,边看边翻页,并时不时回头,越过肩膀察看后面是否有红眼的恶意机器人。随着书页的翻动,你也许会在无意识里考虑这个问题。作为人类,在物理世界移动是如此自然,只需要一丁点的意识即可。而 ... 丹尼尔·威尔逊 现在你可能正拿着一本书,边看边翻页,并时不时回头,越过肩膀察看后面是否有红眼的恶意机器人。随着书页的翻动,你也许会在无意识里考虑这个问题。作为人类,在物理世界移动是如此自然,只需要一丁点的意识即可。而另一方面,机器人———就像最后一个选择踢球的孩子———为了避免伤到自己和别人,每一个动作都必须经过仔细考虑。机器 人专家管这个过程叫做“操作研究”。 前进和逆转 如果你醒来发现自己处在一具新的躯体中,拥有金属手臂,每只手只有三根手指,你会怎么样呢?如果不知道手臂的长度,拿东西会很困难;如果只有三根手指,那么你必须找到一个全新的抓取和握东西的方法;由于弯曲的金属手臂,你可能再也没有约会的机会。这些就是身处各地的孤独的机器人们所面临的重大问题。 运动学研究旨在解决机器人的手臂转向何方(动力学则为了解决移动的速度和劲道)。机器人运动学可分两类:前进和逆转。前进运动学的问题是机器人运用它对自身的了解(关节角度和手臂长度)来判断自己在三维空间中到底身处何方。这算是简单的部分,逆转运动学正好相反,它解决机器人如何移动才能达到合适的姿势(改变关节位置)这一问题。机器人在握你手之前,需要知道你手的大概方位,以及从这里移向那里的最优顺序。有时候,可能没有最好的解决方案(试试用你的右手碰你的右肘)。 对逆转运动学来说,大多数方案运用传感器(通常是视觉和力)来估计机器人身体的当前位置。只要有了这个,机器人就能够计划下一步行动(握手、问好或绞断你的脖子)。机器人的反应很敏捷,日本ATR实验室的类人机器人能够更新视觉,估计世界形势,并且在一秒钟里能够做60个动作。这些类人机器人已经能够跳舞,耍弄彩球,玩篮球和曲棍球。 扫描环境和选择动作的过程叫做反馈环路。新的信息被经常性地用于更新当前的决定。如果缺乏经常性更新,机器人的操作技能会变得糟糕。传感器的损伤(或非常不可信赖的传感器)会干扰这一重要的环路。比如以视觉为基础的跟踪遇到混乱的场景会大受干扰,或者浪费资源去跟踪一些无意义的目标(比如落叶等)。震动可以扰乱力传感器,即使它们位于机器人手臂的内部。虽然机器人能够反应得更快更精确,但它们总是依赖于不断更新的信息和持续改进的计划。