(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910124021.7
(22)申请日 2019.02.19
(71)申请人 上海思致汽车工程技术有限公司
地址 201108 上海市闵行区金都路3669号6
幢1层B14室
(72)发明人 邹博
(74)专利代理机构 上海科盛知识产权代理有限
公司 31225
代理人 蔡彭君
(51)Int.Cl.
G09B 9/04(2006.01)
(54)发明名称
基于自动驾驶模拟器的驾驶行为硬件在环
仿真测试系统
(57)摘要
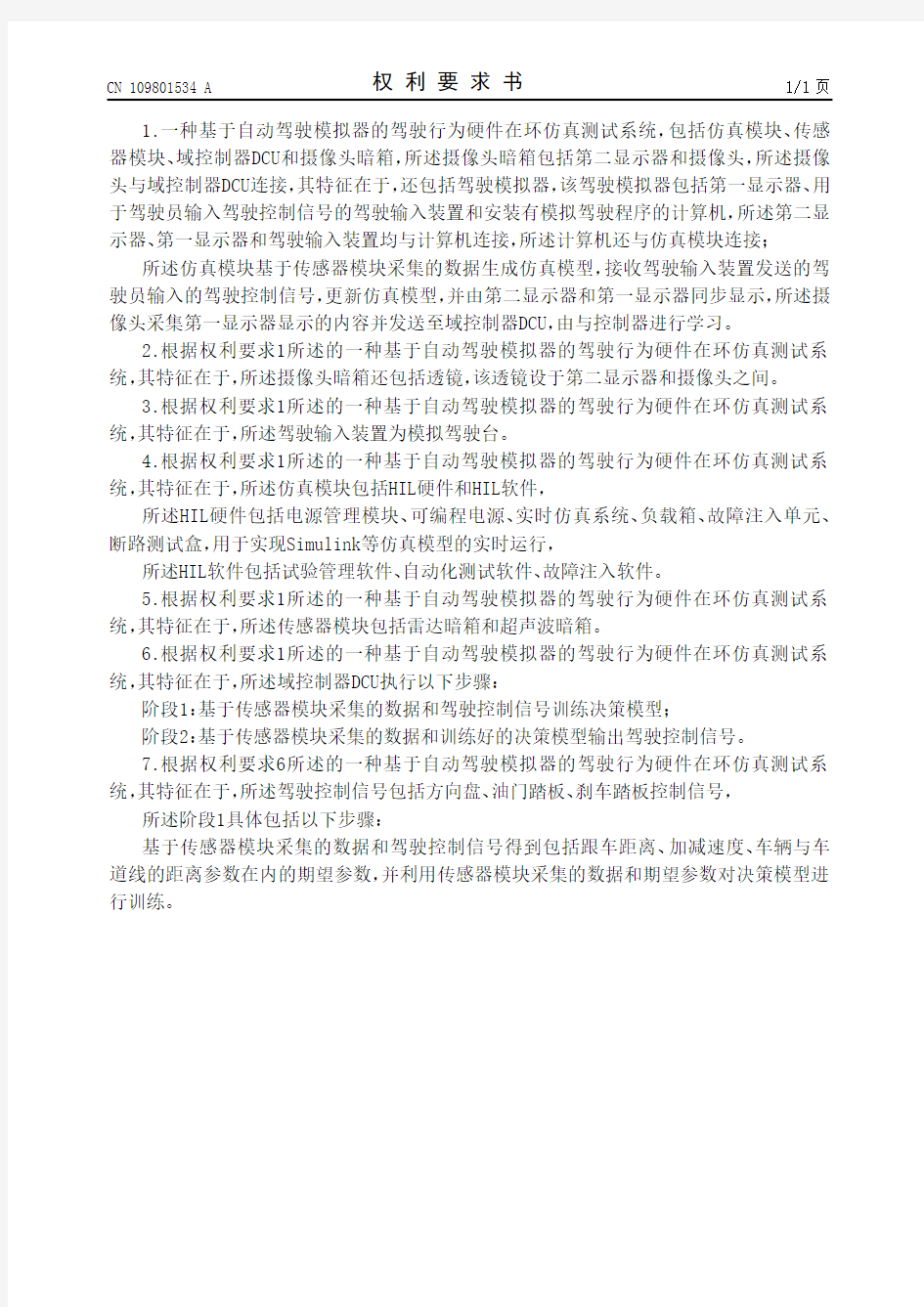
本发明涉及一种基于自动驾驶模拟器的驾
驶行为硬件在环仿真测试系统,包括仿真模块、
传感器模块、域控制器DCU、摄像头暗箱和驾驶模
拟器,摄像头暗箱包括第二显示器和摄像头,还
包括驾驶模拟器,驾驶模拟器包括第一显示器、
用于驾驶员输入驾驶控制信号的驾驶输入装置
和安装有模拟驾驶程序的计算机,第一显示器和
驾驶输入装置均与计算机连接,仿真模块基于传
感器模块采集的数据生成仿真模型,接收驾驶输
入装置发送的驾驶员输入的驾驶控制信号,更新
仿真模型,并由第二显示器和第一显示器同步显
示,摄像头采集第二显示器显示的内容并发送至
域控制器DCU,由与控制器进行学习。与现有技术
相比,
本发明具有提高自动驾驶稳定性等优点。权利要求书1页 说明书3页 附图2页CN 109801534 A 2019.05.24
C N 109801534
A
权 利 要 求 书1/1页CN 109801534 A
1.一种基于自动驾驶模拟器的驾驶行为硬件在环仿真测试系统,包括仿真模块、传感器模块、域控制器DCU和摄像头暗箱,所述摄像头暗箱包括第二显示器和摄像头,所述摄像头与域控制器DCU连接,其特征在于,还包括驾驶模拟器,该驾驶模拟器包括第一显示器、用于驾驶员输入驾驶控制信号的驾驶输入装置和安装有模拟驾驶程序的计算机,所述第二显示器、第一显示器和驾驶输入装置均与计算机连接,所述计算机还与仿真模块连接;
所述仿真模块基于传感器模块采集的数据生成仿真模型,接收驾驶输入装置发送的驾驶员输入的驾驶控制信号,更新仿真模型,并由第二显示器和第一显示器同步显示,所述摄像头采集第一显示器显示的内容并发送至域控制器DCU,由与控制器进行学习。
2.根据权利要求1所述的一种基于自动驾驶模拟器的驾驶行为硬件在环仿真测试系统,其特征在于,所述摄像头暗箱还包括透镜,该透镜设于第二显示器和摄像头之间。
3.根据权利要求1所述的一种基于自动驾驶模拟器的驾驶行为硬件在环仿真测试系统,其特征在于,所述驾驶输入装置为模拟驾驶台。
4.根据权利要求1所述的一种基于自动驾驶模拟器的驾驶行为硬件在环仿真测试系统,其特征在于,所述仿真模块包括HIL硬件和HIL软件,
所述HIL硬件包括电源管理模块、可编程电源、实时仿真系统、负载箱、故障注入单元、断路测试盒,用于实现Simulink等仿真模型的实时运行,
所述HIL软件包括试验管理软件、自动化测试软件、故障注入软件。
5.根据权利要求1所述的一种基于自动驾驶模拟器的驾驶行为硬件在环仿真测试系统,其特征在于,所述传感器模块包括雷达暗箱和超声波暗箱。
6.根据权利要求1所述的一种基于自动驾驶模拟器的驾驶行为硬件在环仿真测试系统,其特征在于,所述域控制器DCU执行以下步骤:
阶段1:基于传感器模块采集的数据和驾驶控制信号训练决策模型;
阶段2:基于传感器模块采集的数据和训练好的决策模型输出驾驶控制信号。
7.根据权利要求6所述的一种基于自动驾驶模拟器的驾驶行为硬件在环仿真测试系统,其特征在于,所述驾驶控制信号包括方向盘、油门踏板、刹车踏板控制信号,所述阶段1具体包括以下步骤:
基于传感器模块采集的数据和驾驶控制信号得到包括跟车距离、加减速度、车辆与车道线的距离参数在内的期望参数,并利用传感器模块采集的数据和期望参数对决策模型进行训练。
2
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910124021.7 (22)申请日 2019.02.19 (71)申请人 上海思致汽车工程技术有限公司 地址 201108 上海市闵行区金都路3669号6 幢1层B14室 (72)发明人 邹博 (74)专利代理机构 上海科盛知识产权代理有限 公司 31225 代理人 蔡彭君 (51)Int.Cl. G09B 9/04(2006.01) (54)发明名称 基于自动驾驶模拟器的驾驶行为硬件在环 仿真测试系统 (57)摘要 本发明涉及一种基于自动驾驶模拟器的驾 驶行为硬件在环仿真测试系统,包括仿真模块、 传感器模块、域控制器DCU、摄像头暗箱和驾驶模 拟器,摄像头暗箱包括第二显示器和摄像头,还 包括驾驶模拟器,驾驶模拟器包括第一显示器、 用于驾驶员输入驾驶控制信号的驾驶输入装置 和安装有模拟驾驶程序的计算机,第一显示器和 驾驶输入装置均与计算机连接,仿真模块基于传 感器模块采集的数据生成仿真模型,接收驾驶输 入装置发送的驾驶员输入的驾驶控制信号,更新 仿真模型,并由第二显示器和第一显示器同步显 示,摄像头采集第二显示器显示的内容并发送至 域控制器DCU,由与控制器进行学习。与现有技术 相比, 本发明具有提高自动驾驶稳定性等优点。权利要求书1页 说明书3页 附图2页CN 109801534 A 2019.05.24 C N 109801534 A
权 利 要 求 书1/1页CN 109801534 A 1.一种基于自动驾驶模拟器的驾驶行为硬件在环仿真测试系统,包括仿真模块、传感器模块、域控制器DCU和摄像头暗箱,所述摄像头暗箱包括第二显示器和摄像头,所述摄像头与域控制器DCU连接,其特征在于,还包括驾驶模拟器,该驾驶模拟器包括第一显示器、用于驾驶员输入驾驶控制信号的驾驶输入装置和安装有模拟驾驶程序的计算机,所述第二显示器、第一显示器和驾驶输入装置均与计算机连接,所述计算机还与仿真模块连接; 所述仿真模块基于传感器模块采集的数据生成仿真模型,接收驾驶输入装置发送的驾驶员输入的驾驶控制信号,更新仿真模型,并由第二显示器和第一显示器同步显示,所述摄像头采集第一显示器显示的内容并发送至域控制器DCU,由与控制器进行学习。 2.根据权利要求1所述的一种基于自动驾驶模拟器的驾驶行为硬件在环仿真测试系统,其特征在于,所述摄像头暗箱还包括透镜,该透镜设于第二显示器和摄像头之间。 3.根据权利要求1所述的一种基于自动驾驶模拟器的驾驶行为硬件在环仿真测试系统,其特征在于,所述驾驶输入装置为模拟驾驶台。 4.根据权利要求1所述的一种基于自动驾驶模拟器的驾驶行为硬件在环仿真测试系统,其特征在于,所述仿真模块包括HIL硬件和HIL软件, 所述HIL硬件包括电源管理模块、可编程电源、实时仿真系统、负载箱、故障注入单元、断路测试盒,用于实现Simulink等仿真模型的实时运行, 所述HIL软件包括试验管理软件、自动化测试软件、故障注入软件。 5.根据权利要求1所述的一种基于自动驾驶模拟器的驾驶行为硬件在环仿真测试系统,其特征在于,所述传感器模块包括雷达暗箱和超声波暗箱。 6.根据权利要求1所述的一种基于自动驾驶模拟器的驾驶行为硬件在环仿真测试系统,其特征在于,所述域控制器DCU执行以下步骤: 阶段1:基于传感器模块采集的数据和驾驶控制信号训练决策模型; 阶段2:基于传感器模块采集的数据和训练好的决策模型输出驾驶控制信号。 7.根据权利要求6所述的一种基于自动驾驶模拟器的驾驶行为硬件在环仿真测试系统,其特征在于,所述驾驶控制信号包括方向盘、油门踏板、刹车踏板控制信号,所述阶段1具体包括以下步骤: 基于传感器模块采集的数据和驾驶控制信号得到包括跟车距离、加减速度、车辆与车道线的距离参数在内的期望参数,并利用传感器模块采集的数据和期望参数对决策模型进行训练。 2
BZ2012-1最新款豪华型汽车驾驶模拟器 BZ2012-1型驾驶模拟器是我公司根据最新的驾驶员培训大纲和最新的驾驶模拟器行业标准(JT/T398-2011)开发而成的最新产品,驾驶座舱进行了大量技术创新和改进,并配置了最新的“BZ-2011驾驶模拟器软件V1.2”。 一、座舱 座舱由驾驶舱座,视景计算机,视屏(19寸显示器),操作传感器,数据采集卡,耳机和话筒等组成。 座舱包含了与真实车辆相同的操作部件,“五大”操纵机构:方向盘、离合器,脚刹,油门和手刹。真车变速器:倒档、一档、二档、三档、四档、五档和空挡(自动档只含前进档、倒车档和驻车档)。真车操作开关:左转向灯、右转向灯、应急灯、喇叭、点火开关、总电开关、安全带、车门、雨刷、远光灯、近光灯、远近光交替。 座舱既可以进行联网训练,也可以进行单机训练。利用主控台计算机,最多可以将30台座舱连接到一个训练场景进行训练。 学员通过操作不同的操作部件,经过各自的传感器产生不同的操作信号,这些操作信号通过数据采集卡传送给计算机,经过各种训练模型的逼真运算,最后在视屏上输出与操作相对应的三维场景与各种声音。
二、主要功能 驾驶舱配备最新的BZ2012-1驾驶模拟器软件V1.2版,该软件为我公司最新开发完成,具有自主知识产权。 软件采用汽车多自由度数学模型,实现汽车转向、制动和加速的逼真模拟;另外利用最新的计算机技术,实现真实的三维场景及逼真的声音模拟。 训练按照三个难度级别分别进行训练:初级驾驶,中级驾驶和高级驾驶。 BZ2012-1驾驶模拟器软件技术指标 训练车型选择场地训练选择界面 城市道路选择乡村道路选择 面板提示语(关键词语): ▲三级课程训练模式:初级、中级、高级 ▲ 14种全新训练车型 ▲全自动配置被动驾驶训练文件 ▲丰富的驾驶培训教学录像 ▲最新理论考试题库(四选一) ▲自动档、手动档合而为一 ▲特别设计太阳炫目训练场景▲多种特殊气候训练 ▲原地驾驶(换档训练)▲加油站、收费站等训练场景▲操作信号实时显示▲ 30台驾驶舱联网训练
仿真飞行驾驶模拟器体验说明 仿真飞行驾驶模拟器,简而言之即能够实现模拟空中飞行,通过复杂的功能装置实现零基础上手操作的飞行模拟装置,未来几年内像私家轿车一样普遍的交通发展。 仿真飞行驾驶模拟器座舱及体验,通过简单的操作装置进行详细的驾驶说明: 幻视联创飞行模拟器包含模拟座舱、运动模拟系统、视景模拟系统、指挥台以及计算机系统。游戏能够复现飞行及空中环境的操作与模拟。 1. 首先在进入到游戏之前先将引擎降到最低,按下开始键start之时可以看到有游戏的进入界面。 2.映入眼帘的是飞机在机场向跑道上滑行,当到达跑道起始点的时候可以听到提示音:“飞机滑行到指定跑道,准备起飞。”此时把引擎拉到最高。这是正式进入游戏的界面,看到准备起飞的字样,飞行员和飞机。表明飞机就现在将要进入了飞行的状态。 3.当看到姿态仪上速度达到100节(在速度线上有一红线提示)的时,将拉杆向上推起,
让飞机成为起飞的状态。 4. 此时可以看到飞机像天空中飞行,把飞机度数控制在15度左右。(幅度不要过大)这时我们要注意飞机的状态。速度控制在300节左右,高度控制在6000 m到9000m左右。如果飞行高度超过10000米,将会看到云海,尽量使飞机的飞行不要超过13000米,否则会影响飞机的飞行安全。注意飞机(中间的黄色方格)的状态高度及速度的位置变化。 5.飞机在正常飞行时,将飞机处于配平状态,即当飞机飞到一定的高度后,我们将不再提升它的高度,而是将飞机处于配平状态。同时引擎可保持在0的位置使飞机匀速前进。飞机不可能永远的向空中飞行,在一定的高度保持稳定。姿态球保持配平的状态。目的:飞机能够平衡的飞行对于乘客来说就如同在地面上一样。对乘客的安全也有了保障。
验证自动驾驶汽车的性能及功能扩展性 随着自动驾驶量产时间点的临近,各大汽车OEM厂商也在加快相关技术的测试和验证。 在日前举行的奥迪Q8 SUV发布会上,德国奥迪表示将于2021年打造并推出基于Aicon 概念车的首个自动驾驶车队。 近日,奥迪公司宣布与以色列自动驾驶仿真测试初创公司Cognata合作,以加快自动驾驶技术的开发进程。后者的仿真平台可以再现真实世界的城市,提供了一系列测试场景,包括模拟现实条件的交通模型。 Cognata的这款模拟平台利用了人工智能、深度学习、计算机视觉等技术,旨在提供一款方案,验证自动驾驶汽车的性能及功能扩展性。 今年初,Cognata就宣布公司正在投放一款基于云端的自动驾驶车辆验证用模拟引擎,英伟达与微软为其提供了相应的技术。 Cognata在2017年拿到了500万美元的融资,投资方包括Maniv Mobility(主要来自捷豹路虎、法雷奥等汽车OEM及零部件厂商)、空中客车公司的风险基金等。 传统汽车要走向自动驾驶,除了各家技术方案公司的努力,包括但不限于OEM、自动驾驶公司,还需要对实验结果进行不断测验,进行对称调试优化。 路测无疑是最直接的方式,但由于汽车的重量以及速度,在实际场景中测试有重大的安全隐患,尤其是在技术尚未成熟之前。可是没有实际的路测,技术的更新升级似乎难度又很大。 尤其是今年上半年,UBER的自动驾驶车在美国亚利桑那州坦佩市的全球首例由自动驾驶汽车酿成的死亡事故发生之后,对于自动驾驶测试是否应该在技术未成熟之前上路测试引发了业界的反思与讨论。 随后,英伟达宣布推出一套名为“NVIDIA DRIVE Constellation”,使用照片级真实感模拟、基于云的自动驾驶汽车测试系统,是一款基于两种不同服务器的计算平台。
CONSTRUCTION 技术探讨 汽车驾驶模拟器的研究与应用综述 龙 琼 周昭明 湖南城市学院土木工程学院 湖南益阳 413000 摘 要:汽车驾驶模拟器通过营造虚拟的驾驶环境,对驾驶员进行驾驶训练,能有效节约能源,降低培训成本,提高培训效率和水平。本文综述了驾驶模拟器的研究与应用问题,首先,对汽车驾驶模拟器的概念、原理进行了简介;然后,分析了汽车驾驶模拟器的研究和应用现状,提出了驾驶模拟器在驾驶培训中的应用问题;最后对汽车驾驶模拟器的未来发展前景进行了展望。本文研究对于我们更好地利用后发优势,开发与应用驾驶模拟器具有一定的借鉴与指导意义。 关键词:汽车驾驶模拟器;驾驶培训;虚拟现实技术 The Reviewed on Research and Application of Automobile Driving Simulator LONG Qiong1, ZHOU Zhao-ming (School?of?Civil?Engineering,?Hunan?City?University,?Yiyang?413000,?China) Abstract: A dynamic Through creating a virtual driving environment and vehicle driving simulator for driver driving training, can effectively save energy, reduce the training costs, improve training efficiency and level. This paper summarizes the research and application of driving simulator problem, first of all, the concept of vehicle driving simulator, the principle has carried on the brief introduction; Then, this paper analyzes the research and application status of vehicle driving simulator, puts forward the application of driving simulator in driving training; Finally the future development prospect of vehicle driving simulator is discussed. In this paper, we study for our better use of advantage of backwardness, the development and application of driving simulator has a certain reference and guidance significance. Key Words: Automobile Driving Simulator; Driving training; Virtual reality technology 中图分类号:F407 文献标识码:A 引言: 随着我国经济的发展,机动车保有量日益增加,交通安全问题越来越成为人们高度关注的社会问题。按照系统论观点,驾驶员、机动车、道路、出行环境是道路交通系统的基本组成要素。而驾驶员作为道路交通系统中的重要元素之一,具有较强的可塑性和主观能动性,为使交通系统整体系统功能达到最优,对驾驶员的培训应在不影响其效益的前提下尽可能处于最优状态。驾驶员的最优基本标准有两个,一是驾驶安全,二是工作量和驾驶效益。因此,加强驾驶员的驾驶技能培训,对于提高整个交通系统安全指标具有较强的理论和实践意义。在这种条件下,汽车驾驶员培训蓬勃发展。但是作为一种飞速发展的培训行业,如何有效地提高驾驶员培训的质量,确保交通安全是驾驶员培训面临的重要问题。在这种情况下,汽车驾驶模拟器(Driving Simulator,DS)应运而生。 本文阐述汽车驾驶模拟器的研究现状及驾驶员培训中的应用问题,并对其发展前景进行了展望。本文研究对于我们更好地利用后发优势,开发与应用驾驶模拟器具有一定的借鉴与指导意义。 1 汽车模拟器简介 汽车驾驶模拟系统是综合计算机、控制、微电子、光学、精密机械等多学科的高新技术产品,是展示汽车特性和性能、模拟汽车驾驶的有效工具,它具备了视觉、听觉、身体触觉的实时模拟功能,不但能对汽车的大部分驾驶情形及不同驾驶条件下的驾驶情况进行模拟,而且可以无任何风险地重复和再现现实世界中的各种灾难性事件,如汽车碰撞等。它利用虚拟现实仿真技术营造一个虚拟的驾驶训练环境,人们通过模拟器的 操作部件与虚拟的环境进行交互,从而进行驾驶训练。 汽车驾驶模拟器按用途不同,可分为两类:一类训练型驾驶模拟器,用于安全教育、交通规则教育和驾驶训练等。另一类是是科研型驾驶模拟器,用于汽车安全产品开发和人-车-路基础学科研究;如图1中(a)、(b)是训练型驾驶模拟器, (c)和(d)则是科研型驾驶模拟器。 图1 各种典型的驾驶模拟器 汽车驾驶模拟器的工作基本工作过程为: Step1:驾驶员对操作部件进行操作,产生相应的机电控制信号; Step2:机电控制信号经过信号采集与处理,形成相应的车辆动力学模型输入信号; Step3:车辆动力学模型进行仿真计算,获得当前的车辆状 第4卷 第36期2014年12月
模拟器命令按键显示/隐藏ATC窗口` (重音符号) 退出FS Ctrl + C 立即退出FS Ctrl + break 显示帧数等信息Shift + Z (多按几次) 全屏模式切换 Alt + Enter 摇杆启用开关 Ctrl + K 显示/隐藏膝板 F10 (多按几次) 显示菜单 Alt 暂停 P 重置当前飞行 Ctrl + ; (分号) 保存飞行 ; (分号) 选择第一项 1 选择第二项 2 选择第三项 3 选择第四项 4 减小 - (减号) 慢慢减小 Shift+ - (减号) 增大 = (等号) 慢慢增大 Shift+ = (等号) 声音开关 Q 时间压缩选择 R (+或–) 自动驾驶命令 空速保持开关 Ctrl + R 空速选择 Ctrl + Shift + R 高度保持开关 Ctrl+ Z 高度选择 Ctrl + Shift + Z 进近模式开关 Ctrl + A 姿态保持开关 Ctrl + T 自动油门预位 Shift + R 起飞/复飞推力 Ctrl + Shift + G 反向进近模式开关 Ctrl + B 飞行指引针开关 Ctrl + F 航向保持开关 Ctrl + H 航向选择 Ctrl + Shift + H 进近航向道保持开关 Ctrl + O 马赫保持开关 Ctrl + M 自动驾驶主开关 Z Nav 1保持开关 Ctrl + N 平直飞行开关 Ctrl + V 偏航阻尼器开关 Ctrl + D 操纵面命令 副翼向左配平 Ctrl + NP 4 副翼向右配平 Ctrl + NP 6 左倾(副翼) NP 4 右倾(副翼) NP 6 将副翼和尾舵回中 NP 5 升降舵向下配平 NP 7 升降舵向右配平 NP 1 襟翼完全放下 F8 襟翼放下一档 F7 襟翼完全收起 F5 襟翼收起一挡 F6 下倾(升降舵) NP 8 上倾(升降舵) NP 2 尾舵向左配平 Ctrl + NP 0 尾舵向右配平 Ctrl + NP Enter 使用尾舵向左偏航 NP 0 使用尾舵向右偏航 NP Enter 扰流板预位 Shift + / (除号) 扰流板/减速板开关 / (除号) 水舵收/放 Shift + W 引擎命令 对于多引擎飞行器,除非 你先按下E+引擎号(1-4) 选择单个引擎,否则你的 操作将对所有引擎生效。 要恢复对所有引擎的控 制,先按住E,然后快速 连续地按下所有引擎号(E, 1, 2,…) 引擎除冰开关 H 自动启动引擎 Ctrl + E 化油器加热/引擎除冰 H 引擎选择 E 启动器选择 J 磁电机选择 M 增大混合比 Ctrl + Shift + F3 减小混合比 Ctrl + Shift + F2 混合比设置显示/隐藏膝 板 显示菜单 暂停 重置当前飞行 保存飞行 起飞/复飞推力 自动油门预位 姿态保持开关 进近模式开关 高度选择 高度保持开关 平直飞行开关 偏航阻尼器开 操纵面命令 副翼向左配平 副翼向右配平
仿真驾驶体验飞行模拟器的应用与案例 幻视联创是国内顶级的飞行模拟器研发机构,多少年来走过了无数的风风雨雨,为飞行模拟行业带来了一次又一次的创新。幻视联创本着一颗爱国的心,为我国军事、航天做出了突出贡献。中国航空研究院院长表示:“航空航天飞行模拟是我国大力发展的科学项目,我们不可能用真实的设备去实验,因为经费太高危险性非常大,所以高精准的模拟设备是最佳的选择,同时对模拟系统的要求也非常之高,要完全吻合真实飞行,无形中就加大了模拟飞行研发的难度,在多次探索中发现幻视联创的飞行模拟器可以满足基本的要求,达到飞行效果。” 国家机构的大力响应,让幻视联创飞行模拟器研发机构家喻户晓,各大商业、地产机构趋之若鹜的纷纷订购与租赁飞行模拟器来提高自己的人气。新光天地购物中心陈设飞行模拟器,众多消费者竞相参观体验,给消费者带来了前所未有的新鲜感,体验式盈利模式从此兴起。而万科房地产活动为取得爆炸式盈利效果,租赁了幻视联创飞行模拟器,仅用7天的时间让盈利效果翻了几倍,可谓是小投入大收入。 幻视联创飞行模拟器为何有如此大的魅力?其原因在于飞行模拟器由真实的座舱、运动模拟系统、视景模拟系统、指挥台以及高级计算机系统组成,姿态
仪、导航仪、引擎参数仪表、飞行摇杆、引擎操纵杆、方向舵、通讯系统等设备也一应俱全。座舱结构细致到每一个棱角,完全按照A380座舱1:1的比例所设计,它以一种无法抗拒的魔力深深的吸引你,激起你的驾驶欲望。飞行模拟器的系统可精确地模拟出飞行高度、速度、姿态、方位、位置等参数,由机场起飞、空中飞行、到降落全程模拟,空中飞行时可遇到雾天、强气流、雷雨等各种气候,飞行模拟器的视景也开始晃动,让飞行驾驶增添了挑战兴趣。其高保真的声音系统模拟出逼真的声音的效果,让飞行驾驶更加身临其境。 近期幻视联创接到了来自美国联合航空公司的传真,想要订购幻视联创的飞行模拟器,幻视联创的董事长问:“为什么要选择我们的飞行模拟器?国外有很多这种开发机构的。”美国联合航空公司给的回答:“原因有两方面,一是飞行系统,二是设备价格,我们考察了很多飞行系统开发机构,你们的飞行系统精确度是最高的,相对国外的开发机构相差无几,同时又比国外的设备价格低很多,我们当然会选择贵公司的设备”。
白皮 书 《测试对于自动驾驶汽车的 推广至关重要》 随着传统汽车制造商与新参与者纷纷投资研发创新技术,自动驾驶汽车(AV)领域的发展日新月异。尽管自动驾驶汽车有可能提升汽车的安全性和驾驶便利性, 但其复杂的设计要求必须使用测试和验证系统进行严格测试,确保在各种交通、路况和天气条件下的行车安全。当然,自动驾驶汽车将使用基于人工智能(AI)的方法,这将使汽车能够通过电信业务和基础设施提供商进行通信。 自动驾驶汽车技术的基础是互联汽车概念。系统会与汽车进行通信,交流道路和交通状况、附近的汽车以及与驾驶体验有关的其他关键信息。自动驾驶汽车技术将多种传感器、计算机和软件整合在一起,创造出自动驾驶汽车。从统计学上来说,这些汽车在安全行驶里程方面已经超越人工驾驶汽车。在大约 94% 的重大车祸中,常见的、可预见的驾驶员人为错误往往是肇事原因之一,例如超速或注意力分散等。
根据 Waymo(Google 以前的自动驾驶汽车项目)的报告,在以 2 英里时速行驶总共超过500 万英里的过程中,仅发生过一次事故,但没有造成任何人身伤害。即使这样,让消费者树立对全自动驾驶汽车的信任也是一个挑战。例如,根据 2018 年美国汽车协会(AAA)的一项调查1,有 73% 的美国驾驶员表示,他们非常担心驾驶自动驾驶汽车;而 63% 的美国成年人表示他们在步行或骑车时与自动驾驶汽车共享道路会感觉不安全。 安全性及其他优点 基于驾驶员错误所造成的事故数量,安全性是最受关注的问题,而自动驾驶汽车可能带来的最大好处就是安全性的提高。将人为错误排除在驾驶环节之外,可以大大减少交通事故中的人身伤亡。 部署自动驾驶汽车技术还有其他好处。例如,随着人口的老龄化,自动驾驶汽车技术将为老年人和残疾人提供更多的出行自由。此外,它还可能创造新的运输方式和商业模式,例如自动驾驶出租车队和共享自动驾驶汽车公司;这些模式可以提高个人生产率。
驾驶模拟器实验方案 一.驾驶模拟器实验 1.自适应巡航的系数检测 自适应巡航需要知道三类驾驶员的数据1ρ,2ρ,r 这三个数据有实验得到,先需要知道三类驾驶员在跟车时的某一时刻自车速度、前车速度、两车距离、采用的加速度,通过公式 1221()()c d a Kx k c c k v v =-=----反求k1、k2,然后由k1,k2通过试凑法求出1ρ,2ρ,r 这样便得出三类驾驶员需要的系数。 具体实施方案:招募三十名驾驶员,由问卷调查分为三类,激进适中与保守,分别实现以下工况,前车距离自车20m,前车以30km/h 驾驶20s,然后10s 匀加速到60km/h 后匀速行驶10 s ,再10s 匀减速到20km/h,匀速行驶10s,再8s 加速到80km/h ,匀速10s,再8s 减速到20km/h 匀速行驶10s,再8s 加速到60km/h ,匀速行驶10s,2s 减速到0km/h 。采集数据为第20s 到30s ,50s 到60s,自车的速度、前车的速度、两车的距离、自车的减/加速度,采样频率为1. 数据处理:把数据分为三类分别对应激进保守适中,分别计算每一类,每类中两组数据计算一次k1k2,每个实验人员有10组k2k1值,求每类人员的平均值。 2.紧急制动 (1)前车以-8m/s2制动时三类驾驶员采用的平均最大减速度求-6-7-8,减速度的增长速率求p 值(在前方紧急制动几秒内减速度增加了多少)。 (2)切换时刻:自车先跟随前车一段时间后前方车辆以-8m/s2紧急制动时,计算三类驾驶员进行紧急制动时与前车的距离或报警系数X ,需要记录数据为两车距离、两车速度、两车减速度。 具体实施方案:人员招募与分类同上,分别实现以下工况,前车以60km/h 速度匀速行驶30s,然后以-8m/s2减速度减速直到停止,采集数据为第三十秒开始两车速度,两车距离,两车减速度,自车直到停止的最大减速度(求amax)及直到最大减速度的时间(求p )。20s 到30s 两车距离、速度,求及b w b c d X d d -=-。由10人验证指标能不能很好的 表示风格。 数据处理:把数据分为三类分别对应激进保守适中,在20s 到30s ,每1s 采一组数据,计算1/TTC ,X 取平均(驾驶员风格阈值)。30s 到32s 每0.1s 采样一次,计算加速度突然增大时的x (切换阈值,且根据三种类型驾驶员)。计算30s 直到前车停下,自车的最大减速度amax ,及直到最大减速度的时间(求p ). 二 仿真实验 1 ACC 通过三种不同控制参数设计的三种控制器,来验证所设计控制器是否与前面实验得来的驾驶员数据吻合,主要参照数据为在相同工况下驾驶员所使用的减速度是否吻合。 具体实验为:前车距离自车20m,前车以30km/h 驾驶20s,然后10s 匀加速到60km/h 后匀速行驶20 s ,再10s 匀减速到20km/h ,和前面数据对比加速度变化情况。 2 AEB 有三种最大制动减速度,对比三种控制器切换时间,制动效果包括安全性,冲击性。 112v v TTC c --=
自动驾驶虚拟仿真测试介绍 自动驾驶虚拟仿真测试介绍(1):是什么 一、引子 二、自动驾驶汽车的仿真测试的不同手段 三、不同仿真测试手段的选择 一、引子 说到仿真测试大家可能会觉得陌生,不过其原理其实已经被广泛采用。 比如李雷想要开车从北京去上海,但是不知道需要多长时间,于是他做了这样的估算: 北京到上海距离s=1200km,开车时速v=120km/h,那么需要的时间为t=s/v=10h;考虑到不是全程高速、中间可能会休息,假设平均时速v’=80km/h会更合理,于是需要的时间为t=s/v’=15h。 通过这个例子,我们可以体会到两点:
仿真即是通过一组公式模仿真实世界,或者说使用一个数学模型简化替代真实世界; 数学模型的复杂度越高,计算结果与真实世界越相近,但是建模难度越高、计算速度越慢。 二、自动驾驶汽车的仿真测试的不同手段 我们首先考虑真实世界的情况,自动驾驶汽车在开放道路进行测试时,可以用下图来表示: 自动驾驶车辆主要由传感器、控制器和执行器构成(当然这主要是指自动驾驶部分,车身、底盘等传统车辆部分暂且不提),驾驶员驾驶车辆在不同的道路、交通和天气环境下接受测试。当然高级别的自动驾驶不需要驾驶员,所以图中用虚线表示。 当在仿真环境中模拟其中的不同部分时,可以得到仿真测试的不同手段。列举如下表所示:
注:后面会有一篇详细介绍不同仿真测试手段的区别,敬请关注。 三、不同仿真测试手段的选择 经常会有人遇到要不要做HIL、要不要买个视频暗箱、要不要买个驾驶模拟器等等疑问,这时如果能先自问自答这样一个问题应该会有所帮助:我们准备测试的被测对象是什么? 如果被测对象仅仅是开发阶段的算法,那只使用MIL/SIL就可以;如果被测对象是要在实车使用的控制器,那可能需要一套HIL设备提前进行测试、提前发现问题。如果不采用视频暗箱、雷达回波模拟器等设备就不能实现测试闭环,那此类传感器信号仿真设备也是需要的。 诸如此类,如果能时刻谨记被测对象是什么和测试目的是什么,应该对选择仿真测试手段有很大帮助。 自动驾驶虚拟仿真测试介绍(2):为什么 一、仿真测试是汽车工程师的自然需求 二、仿真测试是汽车开发流程的必然要求
三屏汽车驾驶模拟器 介绍
ZG-601A3P型主被动式三屏汽车模拟器 一、ZG-601A3P型主被动式三屏汽车模拟器产品概述: 座舱外壳材质:驾驶座舱采用ABS外壳用模具一次铸造成型,无小块拼接,防潮防裂,坚固耐用,永不变型;外观简洁大方、时尚亮丽。五大操作件及仪表台采用真车实件配置,转向机构采用真车方向机总成构建,实车转数方向自动回位;档位外罩采用桑塔纳真车中央通道,具有真车实感。 变速器:采用桑塔纳实车变速箱总成。档位为:倒档、一档、二档、三档、四档、五档和空挡(自动档只含前进档、倒车档和驻车档)。 离合器:离合器采用实车压盘,实现半联动力感,离合器结合、分离、半联动状态感觉明显,分级输出。知名品牌真实汽车配件。 驾驶座舱:驾驶舱是由转向器、油门、离合器、脚刹车、手刹车等操纵机件及座椅等组成。组件必须是真车实物配件。环保,防火外壳。 传感器:信号为模拟量或数字量,输出变化时声音、视像同步变化(音量变化不少于5级),滞后小于50毫秒。有力度变化,力度均适合青少年儿童使用。 转向器:转向器转向范围不小于0-1060度(数字量分级不小于180脉冲/圈),反应灵敏,能够自动回正。油门、刹车信号分级输出,不少于5级,或无级输出。 汽车座椅:专业汽车座椅、美观、耐用。前后可调,适合青少年及儿童使用。 (公司可根据客户要求订做:奥迪、帕萨特、富康、捷达、长安逸动、宝来、北汽勇士、东风猛士、南京依维柯、东风EQ1118/1121/1122/1141、解放CA1121/1122/1141、斯太尔、猎豹、陕汽等车型) 二、ZG-601A3P型主被动式三屏汽车模拟器软件概述: ZG-601A3P型主被动式三屏汽车模拟器软件是我公司在2017年新款软件,全角度视角,画面清楚真实感强,功能强大,外观时尚,配有3台32寸液晶显示器,带有主被动式练习训练功能。整体画面宽大逼真,它突破了原来在行驶十字路口向左拐的视线盲区,在驾驶过程中能清楚看到左右两侧交通状况,训练时更加方便自如,从而清楚的观察车辆与路面的位置关系;并新增加“公安部123号令场地考试项目。” ZG-601A3P型主被动式三屏汽车模拟器完全符合“中华人民共和国公安部 令第123 号令”及教育部新的国家机动车驾驶员训练大纲要求,小型汽车、小型自动挡汽车、残疾人专用小型自动挡载客汽车和低速载货汽车场地5项必考;大型客车、牵引车、城市公交车、中型客车、大型货车场地16项必考,产品具有自主知识产权。
飞行模拟器实习报告 本学期上海工程技术大学飞行学院举行了飞行模拟武器实习。作为飞行学院的一名大三学生,我参加了这次模拟机实习。本次实习分为三个阶段:1、陆总的《YGI概念型模拟器飞行操作教程》的讲座; 2、上机训练; 3、教员和老师的讲评。 此次实习的目的:本实习是飞行技术专业本科生的一项专业实习,其目的是通过对YGI概念型模拟器飞行操作教程的学习,加深对所学专业的理解,明确实习目的。要求学生通过上机训练,将课本所学的理论知识与实际操作相结合,掌握飞行的一般程序和基本操作方法,初步学会机组资源管理,考察学生的飞行综合能力,为后续去国外航校的飞行训练奠定基础。 一开始在没有学习专业课的时候,大一下学期我们也参加了一次飞行模拟器的飞行训练,但是由于什么都不知道,根本不知道也记不清楚当时我们学会了些什么,我们飞了些什么。这次实习前陆总给我上了一场讲座——《YGI概念型模拟器飞行操作教程》,介绍了上海工程技术大学飞行学院YGI概念型模拟器驾驶舱布局与设备和现代民用大型运输飞机的基本飞行操纵方法。其内容包括了设备及仪表、飞机的性能,正常飞行程序、非正常飞行程序和飞行检查单。在设备与仪表中,飞行姿态显示器是最重要的。它的功能是:显示了飞机的俯仰与坡度—飞行姿态;飞行速度;飞行高度;升降速率;显示航向还有ADF指针等等。飞机性能主要看以下几个数据:起飞速度,着陆速度,起飞滑跑距离,着陆滑跑距离,巡航速度,最大巡航速度等
等。让我记忆最深刻的是起飞速度,其中V1(决断速度其大小等于135海里/小时)、VR(抬轮速度138海里/小时)、V2(其大小为143海里/小时)很重要,起飞的时机要把握好。正常飞行程序分为:驾驶舱检查程序、发动机启动程序、滑行前程序、滑行程序、起飞前程序、起飞程序等等。在起飞前,这些程序都要一步一步做的,副驾驶配合机长完成,且必须做的眼到手到。这是为了检查飞机的状态是否能够安全起飞。非正常飞行程序虽然很少见,但是也有发生的,下面我来介绍一下非正常飞行程序。出现非正常情况有这些因素:中断起飞、一台发动机失效(V1后继续起飞)、单发目视进近、单发复飞、发动机发生火警、两台发动机失效、陆地迫降、起落架发生故障、襟翼发生故障。这些问题一旦出现就一定要执行非正常检查单,飞行员一定要冷静处理,相信自己的技术,因为我们的目标就是建立一个安全舒适的飞行环境。通过陆总的讲座以及我学习的专业课知识,以上便是我的一些学习心得。
ICS 01.110 T00/09 T/CMAX 中关村智通智能交通产业联盟团体标准 2018-02-11 发布2018-02-11 实施 中关村智通智能交通产业联盟发布
T/CMAX 116-01—2018 目次 前言 .................................................................... II 1 范围 (1) 2 规范性引用文件 (1) 3 术语和定义 (1) 4 评估内容 (3) 5 评估操作要求 (6) 6 评估评判 (20) 附录 A (31) 附录 B (63) I
T/CMAX 116-01—2018 II 前言 本标准按照GB/T1.1-2009《标准化工作导则_第1部分》给出的规则起草。 本标准作为《北京市关于加快推进自动驾驶车辆道路测试有关工作的指导意见(试行)》 及《北京市自动驾驶车辆道路测试管理实施细则(试行)》配套落实技术文件。 本标准除编辑性修改外,主要内容变化如下: ——修改了规范性引用文件(见2,见2018.2版2) ——增加了术语和定义自动驾驶系统(见3.3) ——增加了术语和定义相同自动驾驶车辆(见3.9) ——增加了术语和定义背景车辆(见3.10) ——增加了术语和定义评估车辆(见3.11) ——修改了评估内容评估车型(见4.2,见2018.2版4.2) ——修改了评估内容评估内容与评估分级(见4.4,见2018.2版4.4) ——修改了评估内容评估内容与评估车型(见4.5,见2018.2版4.5) ——修改了评估操作要求一般规定的章条编号(见5.1,见2018.2版5.1) ——增加了评估操作要求申请能力评估前提(见5.1.1) ——修改了评估操作要求评估操作要求(见5.1.3,见2018.2版5.1.2) ——修改了评估操作要求评估记录工具(见5.1.4,见2018.2版5.1.3) ——修改了评估操作要求场景布置规定(见5.1.5,见2018.2版5.1.4) ——修改了专项操作要求的章条编号(见5.2,见2018.2版5.2) ——修改了专项操作要求交通标志(见5.2.1,见2018.2版5.2.1) ——修改了专项操作要求紧急情况处置(见5.2.11,见2018.2版5.2.11) ——修改了专项操作要求人工介入后的可操控性(见5.2.12,见2018.2版5.2.12)
仿真器与仿真设备 357 某型飞机飞行模拟器的设计与实现 李军姜国卫 (空军军训器材研究所,北京,100089) 摘要:某型飞机是我军的新型作战飞机,设备复杂。为使部队训练手段现代化,提高部 队训练质量和训练效益,尽快增强部队战斗力,保障飞行安全,我们研制了该型飞机的飞行 模拟器。该模拟器以基本驾驶飞行技术和战术训练为重点,用于飞行员和领航员的改装、技 术和战术训练,是国内首次研制成功的集飞行员和领航员训练于一体的大型飞行模拟器,系 统规模大,技术难度高。本文介绍了该型飞机飞行模拟器的设计与实现,包括模拟器的功能、系统组成、技术特点和使用情况。 1 引言 某型飞机是我国自行研制的超音速歼击轰炸机,主要用于突击敌战役纵深目标和敌中型以上水面舰船,在不带对地(海)攻击武器情况下,也可作为歼击机执行为轰炸机群和舰船护航、同机护航、远程截击及歼灭空中敌机等空中作战任务。该型飞机具有良好的低空飞行特性、较大的作战半径和载弹量。与国产其它飞机相比,该型飞机由前驾驶员和后领航员两个座舱组成,机载设备数量大、功能多、技术新,系统复杂。自从该型飞机装备部队以来,一直没有相应的模拟器供部队使用。由于新技术、新设备的大量使用,飞机的综合性能及武器装备由简单变复杂,由单一变组合化。作为飞行人员,在一定的飞行时间内已经很难熟练掌握飞行操纵技能和机载装备的使用方法,灵活应用于战术科目的演练就更加困难,更无法掌握临界参数状态下的特情处置方法。因此,训练手段模拟化,是形势发展的需要。为使部队训练手段现代化,提高部队训练质量和训练效益,尽快增强部队的战斗力,保障飞行安全,给飞行人员提供一套具有真实场景,实时仪表,如身临其境般感觉的训练仿真设备是十分必要的,也是非常迫切的。 2 基本组成与原理 该型飞机飞行模拟器是以基本驾驶飞行技术和战术训练为重点的多任务训练模拟器,用于该型飞机飞行员和领航员的改装、技术和战术训练。 该型飞机飞行模拟器是一台人在回路里的大型、实时仿真系统,其组成框图及控制关系如图1所示。该模拟器由前舱主控计算机、杆力计算机、教控台计算机、前舱雷达计算机、平显计算机、后舱主控机、后舱雷达计算机、GPS计算机、全向告警器计算机、导弹指挥仪计算机、图形工作站和网络服务器等12台计算机通过网络系统构成,是以计算机为核心的复杂的人机闭环实时仿真系统。其中各个子系统均与计算机交连构成各自的闭环。飞行员、领航员、飞行教员、主控机、各子系统又组成了一个大闭环。
象条件,以及白天、黄昏、夜间的不同时刻景象。 操纵负荷系统:给飞行员提供操纵载荷力的感觉。运动系统给飞行员提供运动感觉,目前常采用的六自由度运动系统能提供瞬时过载,但不能提供持续过载,持续过载的模拟可采用离心机、抗荷服、过载座椅等。 3.一般要求 飞行模拟器的一般要求包括如下几个方面: (1)功能要求 能按照所模拟飞机和要求完成下列操作科目:飞行前准备、地面操作、起飞、爬升、巡航、下降、进近、中断进近、地面可视段和着陆、风切变、地面操纵(着陆后)、发动机关车及停机。 (2)仿真计算机用到的建模源数据要求 仿真计算机是飞行模拟器的核心部分,其数学建模用到的数据一般应为模拟目标飞机的真实数据。在确实没有飞机源数据的情况下,允许采用经验数据。对于新型号飞机尚未进行试飞的情况下,运行采用预测数据。当具备飞机的试飞数据后,应及时对经验数据和预测数据进行修改。建立的数学模型必须经过验证,通过与真实系统响应特性和数据的比较来进行验模的工作。
(3)对人感系统的要求 受训飞行员的感觉有操纵力感、眼睛对窗外视景和舱内仪表的感觉、耳朵对声音的感觉和身体对飞机运动的感觉。为给飞行员造成一个真实的飞行环境,飞行模拟器通常要求具体如下人感系统: 操纵负荷系统:模拟飞机的操纵感觉和配平感觉。 视景系统:模拟飞机座舱外的景象,是飞行员判断飞行品质十分重要的视觉信息。 仪表系统:在座舱仪表板按所模拟飞机座舱的布局按照飞行仪表和多功能显示设备,其外形、表盘和静、动态性能应与所模拟的飞机仪表完全一致。 运动系统:用于驱动整个模拟座舱运动,模拟飞机的空中和地面运动。通常希望采用六自由度运动系统反映飞机的三个角位移和三个直线位移的运动。 过载感觉系统:飞行员在空中感受的过载只靠运动系统是不能实现的,可采用抗负荷和过载座椅来实现。 飞行模拟器生产企业介绍 成立于2010年的福州正辉信息科技有限公司是一家集研制开发、生产、服务为一体的专业化高科技企业。该公司专注于仿真模拟器的研制,是目前中国最大的学习应用软件和特殊装备智能仿真模拟体验系统提供商之一。正辉科技一直秉承一切以客户价值为依归的经营理念,始终处于稳健、快速发展的状态。2013年5月,正辉科技的企业客户数量突破3000家;目前,正辉科技学习应用软件荣获中国软件著作权许可和中国IT产业最具竞争力品牌金奖,中国软件行业
HEICON Global Engineering GmbH Kreuzweg 22, 88477 Schwendi Internet: www.heicon-ulm.de Blog: http://blog.heicon-ulm.de Software unit testing: Aerospace best practices usable in autonomous vehicles?
HEICON –Global Engineering GmbH HEICON is a specialized engineering company which provides consulting-and development support with a focus on software-based embedded systems. The efficient implementation of methods and processes is the area of our engagement. Founding: 2018 Headquarter:Schwendi near Ulm Membership: Revenue Distribution: 71% 72% 39% 16% 23%20% 28% 36% 35% 6%18% 14% 4% 3%10%11%19% 1%2%8%19%18%2%8%4%5%7%0% 10%20%30%40%50%60%70%80%90%100% 2013 2014 2015 2016 2017 Other Sectors Military Space Railway Industrial Automation Automotive Aerospace
汽车驾驶模拟器进重庆驾校每年节油180万升(图) 来源: 华龙网(重庆) 学员在汽车驾驶模拟器上模拟培训市运管局供图华龙网发 华龙网06月12日16时45分讯(记者刘艳)模拟起步、换挡、陡坡、下坡等多种模式,可真实体会到上车感受。今日,记者在渝举行的“第七届泛珠三角区域道路运输合作发展联席会议”上获悉,这种新的驾驶培训模式目前已在我市部分驾校试点。 模拟情景各种道路模式都有 据介绍,这种驾驶模拟器看起来就像一台大游戏机,实际是一台由电脑控制的汽车教学模型。模拟驾驶仪由方向盘、手制动、仪表台及仪表、座椅等组成,离合器为实车离合器,能明显结合、分离、半联动状态,驾驶舱和真实的车辆几乎没有区别。 “坐上驾车模拟器,你会看到前方有一个的电子屏幕。”相关负责人介绍,它利用最新的计算机技术,屏幕上可以实现真实的三维场景及逼真的声音模拟,更有雨天、冰雪天、陡坡、下坡等多种模式。模拟器还可以模拟高速公路、山区道路等因安全因素难以实现的驾驶培训教学活动。 模拟不会取代实车训练 有了模拟器,学习驾驶技术是不是就不需要实车培训了呢?该负责人表示,模拟训练不会取代实车训练。“模拟训练有一个优点,就是为实车训练打基础。” 据介绍,将模拟驾驶器引进学员的培训中,可让学员对各种可能遇上的情况有真实、感性的认识,既安全,又可以消除初学者的紧张心理。该负责人说,模拟训练为学员的实车训练打基础。 每年可节油180万升 使用汽车驾驶模拟器,更重要的目的还是节能减排。该负责人说,每位学员模拟训练10个小时,折算实车训练3个学时。按此算,每人操作培训10学时在模拟器上进行训练,
可节油30升,重庆每年培训学员约40万人,按下限值每年通过模拟驾驶器培训6万人算,则可节油180万升。 按计划,从今年起,将在重庆驾培行业推广安装200台模拟器。作者:刘艳 (本文来源:华龙网) 富阳驾校正式启用驾驶模拟器 来源: 富阳日报 日前,记者从市运管所获悉,驾训新课程模拟器项目已在我市驾校正式启用。学车的市民想要上路训练,必须先过模拟器这一关。为此,记者专门前往承担这一项目培训的桐江机动车驾驶员培训中心(以下简称桐江驾校)体验了一把。 动作一旦出错,系统立马提醒 记者了解到,桐江驾校目前共有20台驾驶训练模拟器,分处两室。其中,12台适于初级阶段学员的使用,主要通过图解教学来强化理论学习,让学员更加熟悉车内的构造;其余8台则在显示屏上模拟出行车中的复杂环境,学员坐在模拟器上,感觉就像行驶在车水马龙的真实道路上,人行横道线上还时不时有行人经过。 在教练的指导下,体验开始。记者选择了雨雪天模式,模拟器的屏幕上立即出现下雪天的效果,雪花大朵大朵地飘落下来,车前白茫茫一片,辅助教学系统语音提示“开启雨刮器”。记者刚要启动车子,电脑屏幕上就发出警告“未系安全带”;记者不断加档,当加到4档时,系统开始高声提醒“下雪天请控制车速”;当记者冲红灯后,电脑会提示“小心前方行人”、“冲了红灯”;由于雪天行驶速度过快,记者在一次转弯时车子打滑,撞到了路边的建筑物,翻了车,模拟器停止了运行。 模拟恶劣天气、高速公路培训 “夏天学车的学员无法体验到大雪等恶劣天气,而且学车时也不能到高速道路上行驶,但这些实地驾驶的经历对于驾驶员来说是必须掌握的。模拟器培训在一定程度上弥补了这一缺陷。”一位桐江驾校的教练说。 一位正在进行模拟器练习的张小姐对记者说,她是第一次用模拟驾驶器学车,“很好玩,如果让我直接开真车,我会很紧张,通过模拟以后再去开车,胆子应该会大很多”。