
ADAMS柔性体阻尼比设置
下面以简单柔性体的相关操作流程介绍ADAM S柔性体阻尼比设置方法:1、某连杆柔性体如下图1,图示了其10阶模态频率:
图1 柔性体模态信息
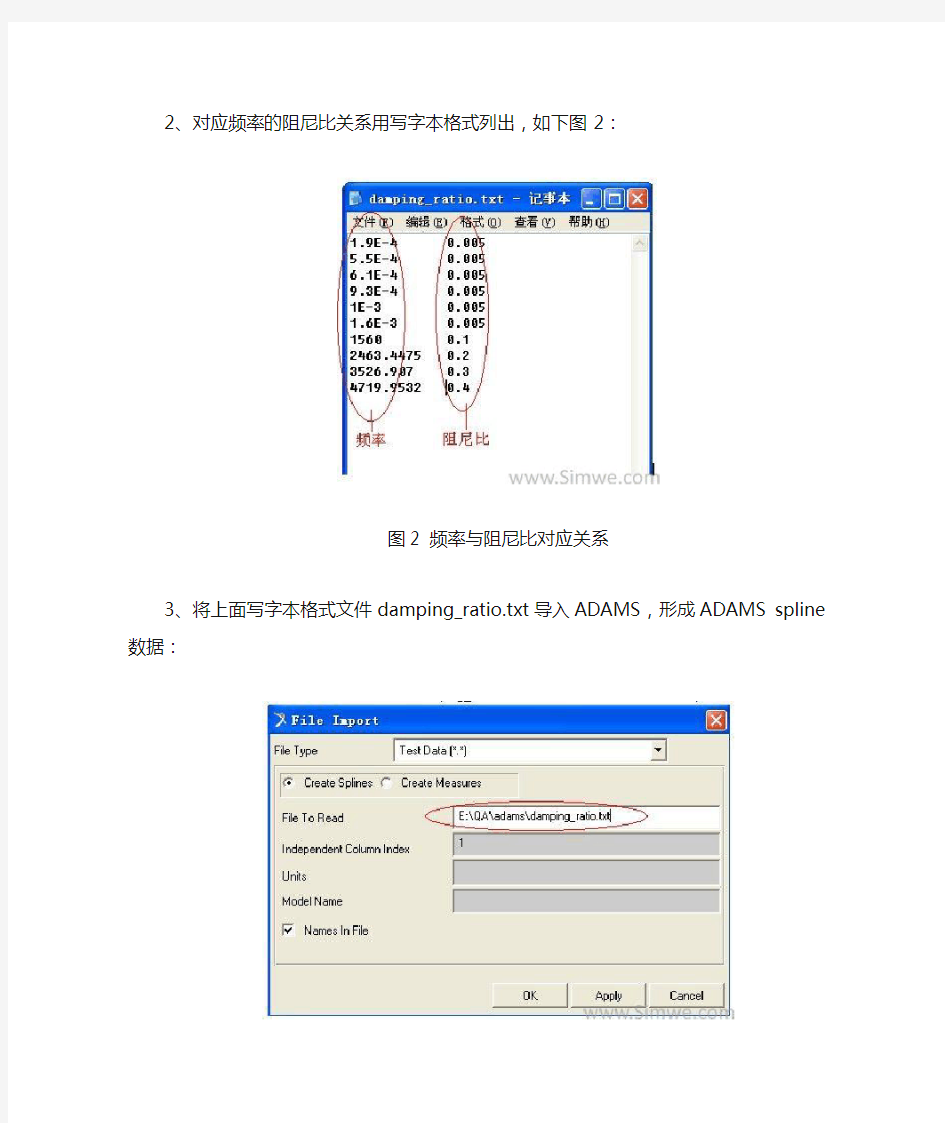
2、对应频率的阻尼比关系用写字本格式列出,如下图2:
图2 频率与阻尼比对应关系
3、将上面写字本格式文件damping_ratio.txt导入ADAMS,形成ADAMS spline数据:
图3 导入damping_ratio信息
4、将生成的damping_ratio用样条插值函数拟合成柔性体的阻尼比,如下图4:
图4 通过样条插值函数拟合阻尼比
《阻尼振动与受迫振动》实验报告 一、实验目的 1. 观测阻尼振动,学习测量振动系统基本参数的方法; 2. 研究受迫振动的幅频特性和相频特性,观察共振现象; 3. 观测不同阻尼对受迫振动的影响。 二、实验原理 1. 有粘滞阻尼的阻尼振动 弹簧和摆轮组成一振动系统,设摆轮转动惯量为J ,粘滞阻尼的阻尼力矩大小定义为角速度d θ/dt 与阻尼力矩系数γ的乘积,弹簧劲度系数为k ,弹簧的反抗力矩为-k θ。忽略弹簧的等效转动惯量,可得转角θ的运动方程为 220d d J k dt dt θθγθ++= 记ω0为无阻尼时自由振动的固有角频率,其值为ω0=k/J ,定义阻尼系数β =γ/(2J ),则上式可以化为: 2220d d k dt dt θθ βθ++= 小阻尼即22 00βω-<时,阻尼振动运动方程的解为 ( )) exp()cos i i t t θθβφ=-+ (*) 由上式可知, 阻尼振动角频率为d ω=阻尼振动周期为2d d T π ω= 2. 周期外力矩作用下受迫振动的解 在周期外力矩Mcos ωt 激励下的运动方程和方程的通解分别为 22cos d d J k M t dt dt θθγθω++= ()( )) ()exp cos cos i i m t t t θθβφθωφ=-++- 这可以看作是状态(*)式的阻尼振动和频率同激励源频率的简谐振动的叠加。 一般t >>τ后,就有稳态解 ()()cos m t t θθωφ=- 稳态解的振幅和相位差分别为 m θ=
22 02arctan βω φωω =- 其中,φ的取值范围为(0,π),反映摆轮振动总是滞后于激励源支座的振动。 3. 电机运动时的受迫振动运动方程和解 弹簧支座的偏转角的一阶近似式可以写成 ()cos m t t ααω= 式中α m 是摇杆摆幅。由于弹簧的支座在运动,运动支座是激励源。弹簧总转 角为()cos m t t θαθαω-=-。于是在固定坐标系中摆轮转角θ的运动方程为 ()22cos 0m d d J k t dt dt θθγθαω++-= 也可以写成 22cos m d d J k k t dt dt θθγθαω++= 于是得到 2 m θ= 由θ m 的极大值条件0m θω? ?=可知,当外激励角频率ω=系统发生共振, θ m 有极大值 α 引入参数(0ζβωγ==,称为阻尼比。 于是,我们得到 m θ= ()() 02 02arctan 1ζωωφωω=- 三、实验任务和步骤 1. 调整仪器使波耳共振仪处于工作状态。 2. 测量最小阻尼时的阻尼比δ和固有角频率ω0。 3. 测量阻尼为3和5时的振幅,并求δ。 4. 测定受迫振动的幅频特性和相频特性曲线。 四、实验步骤。
1.问题描述 研究太阳能板展开前和卫星或火箭分离前卫星的运行。研究其发射振动环境及其对卫星各部件的影响。 2.待解决的问题 在发射过程中,运载火箭给敏感部分航天器部件以高载荷。每个航天器部件和子系统必学设计成能够承受这些高载荷。这就会带来附加的质量,花费高、降低整体性能。 更好的选择是设计运载火箭适配器(launch vehicle adapter)结构。 这部分,将设计一个(launch vehicle adapter)的隔离mount,以在有效频率范围降低发射震动传到敏感部件的部分。关心的敏感部件在太阳能板上,对70-100HZ的输入很敏感,尤其是垂直于板方向的。 三个bushings将launch vehicle adapter和火箭连接起来。Bushing的刚度和阻尼影响70-100HZ范围传递的震动载荷。所以设计问题如下: 找到运载火箭适配器系统理想刚度和阻尼从而达到以下目的: 传到航天器的垂直加速度不被放大; 70-100HZ传递的水平加速度最小。 3.将要学习的 Step1——build:在adams中已存在的模型上添加输入通道和振动执行器来时系统振动,添加输出通道测量响应。 @ Step2——test:定义输入范围并运行一个振动分析来获得自由和强迫振动响应。 Step3——review:对自由振动观察模态振型和瞬态响应,对强迫振动,观察整体响应动画,传递函数。 Step4——improve:在横向添加力并检查传递加速度,改变bushing的刚度阻尼并将结果作比较。添加频域测量供后续设计研究和优化使用。
需创建的东西:振动执行器、输入通道、输出通道 完全非线性模型 打开模型在install dir/vibration/examples/tutorial satellite 文件夹下可将其复制到工作木录。
弹簧质量阻尼实验 指导书
质量-弹簧-阻尼系统实验教学指导书 北京理工大学机械与车辆学院 .3
实验一:单自由度系统数学建模及仿真 1 实验目的 (1)熟悉单自由度质量-弹簧-阻尼系统并进行数学建模; (2)了解MATLAB 软件编程,学习编写系统的仿真代码; (3)进行单自由度系统的仿真动态响应分析。 2 实验原理 单自由度质量-弹簧-阻尼系统,如上图所示。由一个质量为 m 的滑块、一个刚度系数为k 的弹簧和一个阻尼系数为c 的阻尼器组成。系统输入:作用在滑块上的力f (t )。系统输出:滑块的位移x (t )。 建立力学平衡方程: m x c x kx f ?? ? ++= 变化为二阶系统标准形式: 22f x x x m ζωω?? ? ++= 其中:ω是固有频率,ζ是阻尼比。 ω= 2c m ζω= = 2.1 欠阻尼(ζ<1)情况下,输入f (t )和非零初始状态的响应:
() ()sin()) )] t t x t t d e ζωτ τ ζω ττ +∞ -- = ? - =- +- ? 2.2 欠阻尼(ζ<1)情况下,输入f(t)=f0*cos(ω0*t) 和非零初始状态的的响应: 022 3 00 22222 00 222222 2 ()cos(arctan()) 2f [(0)]cos() [()(2)] sin( t t x t t x e k e ζω ζω ζωω ω ωω ζωω ωωζωω - ? - =- - ++ -+ +) 输出振幅和输入振幅的比值:A= 3 动力学仿真 根据数学模型,使用龙格库塔方法ODE45求解,任意输入下响应结果。 仿真代码见附件 4 实验 4.1 固有频率和阻尼实验 (1)将实验台设置为单自由度质量-弹簧-阻尼系统。 (2)关闭电控箱开关。点击setup菜单,选择Control Algorithm,设置选择Continuous Time Control,Ts=0.0042,然后OK。 (3)点击Command菜单,选择Trajectory,选取step,进入set-up,
ADAMS 分析实例-定轴轮系和行星轮系传动模拟 有一对外啮合渐开线直齿圆柱体齿轮传动.已知ο20,4,25,5021====αmm m z z ,两个齿轮的厚度都是 50mm 。 ⒈ 启动ADAMS 双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。在欢迎对话框中选择“Create a new model ”,在模型名 称(Model name )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。如图1-1所示。 图1-1 欢迎对话框 ⒉ 设置工作环境 对于这个模型,网格间距需要设置成更高的精度以满足要求。在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。然后点击“OK ”确定。如图2-1所表示。 用鼠标左键点击选择(Select )图标,控制面板出现在工 具箱中。 用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。 ⒊创建齿轮 在ADAMS/View 零件库中选择圆柱体 (Cylinder )图标 ,参数选择为“New Part ”,长度(Length )选择50mm (齿轮的厚度),半径 ( Radius ) 选 择 100mm (1002 5042z m 1=?=?) 。如图3-1所示。 图 2-1 设 置工作网格对话框 图3-1设置圆柱体选项 在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。则一个圆柱体(PART_2)创建出来。如图3-2所示。 图3-2 创建圆柱体(齿轮) 在ADAMS/View 中位置/方向库中选择位置旋转(Position: Rotate …)图标,在角度(Angle )一栏中输入 90,表示将对象旋转90度。如图3-3所示。 在ADAMS/View 窗口中用鼠标左键选择圆柱体,将出来一个白 色箭头,移动光标,使白色箭头的位置和指向如图3-4所示。 然后点击鼠标左键,旋转后的圆柱体如图3-5所示。
《阻尼振动与受迫振动》实验报告一、实验目的1.观测阻尼振动,学习测量振动系统基本参数的方法;2.研究受迫振动的幅频特性和相频特性,观察共振现象;3.观测不同阻尼对受迫振动的影响。 二、实验原理1.有粘滞阻尼的阻尼振动弹簧和摆轮组成一振动系统,设摆轮转动惯量为J ,粘滞阻尼的阻尼力矩大小定义为角速度d θ/dt 与阻尼力矩系数γ的乘积,弹簧劲度系数为k ,弹簧的反抗力矩为-k θ。忽略弹簧的等效转动惯量,可得转角θ的运动方程为 220d d J k dt dt θθγθ++=记ω0为无阻尼时自由振动的固有角频率,其值为ω0=,定义阻尼系数k/J β=γ/(2J ),则上式可以化为: 2220d d k dt dt θθβθ++=小阻尼即时,阻尼振动运动方程的解为2200βω-< (*)( )) exp()cos i i t t θθβφ=-+由上式可知,阻尼振动角频率为 ,阻尼振动周期为d ω=2d d T π=2.周期外力矩作用下受迫振动的解 在周期外力矩Mcos ωt 激励下的运动方程和方程的通解分别为22cos d d J k M t dt dt θθγθω++=()( ))()exp cos cos i i m t t t θθβφθωφ=-++-这可以看作是状态(*)式的阻尼振动和频率同激励源频率的简谐振动的叠加。一般t >>τ后,就有稳态解 ()()cos m t t θθωφ=-稳态解的振幅和相位差分别为路须同时切断习题电源,备制造厂家出具高中资料需要进行外部电源高中资料
m θ=2202arctan βωφωω=-其中,φ的取值范围为(0,π),反映摆轮振动总是滞后于激励源支座的振动。3.电机运动时的受迫振动运动方程和解弹簧支座的偏转角的一阶近似式可以写成 ()cos m t t ααω=式中αm 是摇杆摆幅。由于弹簧的支座在运动,运动支座是激励源。弹簧总转角为。于是在固定坐标系中摆轮转角θ的运动方程为()cos m t t θαθαω-=-()22cos 0m d d J k t dt dt θθγθαω++-=也可以写成 22cos m d d J k k t dt dt θθγθαω++= 于是得到m θ=由θm 的极大值条件可知,当外激励角频率时, 0m θω ??=ω=系统发生共振,θm 有极大值。α 引入参数,称为阻尼比。(0ζβ ωγ==于是,我们得到 m θ=()()0202arctan 1ζωωφωω=-三、实验任务和步骤 1.调整仪器使波耳共振仪处于工作状态。 2.测量最小阻尼时的阻尼比ζ和固有角频率ω0。进行隔开处理;同一线槽内人员,需要在事前掌握图纸电机一变压器组在发生内部
实验三 弹簧阻尼器机构的动力学模拟 一、实验目的 1.掌握多体动力学分析软件ADAMS 中实体建模方法; 2.掌握ADAMS 中施加约束和驱动的方法; 3.计算出弹簧阻尼机构运动时,弹簧振子的位移、速度、加速度和弹簧位移与弹簧力的对应关系。 二、实验设备和工具 1.ADAMS 软件; 2.CAD/CAM 机房。 三、实验原理 按照弹簧阻尼器机构的实际工况,在软件中建立相应的几何、约束及驱动模型,即按照弹簧阻尼器机构的实际尺寸,建立弹簧、阻尼器和质量块的几何实体模型;质量块的运动为上下作自由衰减运动,可以理论简化为在质量块与大地之间建立平动副,弹簧、阻尼器共同连接到连接大地和质量块上;然后利用计算机进行动力学模拟,从而可以求得质量块在弹簧阻尼器连接下任何时间、任何位置所对应的位移、速度加速度,以及弹簧中位移和弹性恢复力之间的对应关系等一系列参数,变换弹簧、阻尼器和质量块的参数可以进行多次不同状态下的模拟。 四、实验步骤 1.问题描述 图3-1为弹簧阻尼器机构简图,M 为振子,质量为187.224kg ;弹簧刚度K =5N/mm ,阻尼器阻尼为C =0.05N/mm ,弹簧空载长度为400mm ,求当弹簧阻尼机构振动时,铰接点A 处的支撑力。 2. 启动 ADAMS M :187.224Kg K :5.0N/mm C :0.05N-sec/mm L0:400mm F0:0 图3-1 弹簧阻尼器机构示意图
2.1 运行ADAMS2005,在欢迎界面中,选择Create a new model, Model name 输入spring_mass; 2.2 确认Gravity(重力)文本框中是Earth Normal(-Global Y),Units (单位)文本框中是MMKS(mm,kg,N,s,deg)。 3. 建立几何模型 3.1单击F4显示坐标窗口; 3.2在主工具箱中选择Box 工具按钮建立一质量块,用默认尺寸即可; 3.3 在屏幕任意位置点击鼠标创建质量块; 3.4 右键点击质量块,选择part_2,然后选择Rename,更名为mass; 3.5 右键点击质量块,选择mass,然后选择Modify。在打开的对话框中修改Define mass by 项为User Input,在Mass栏输入187.224; 3.6 选择右视图按钮查看质量块的位置,进行调整栅格位于质量块的中心。选择Edit菜单下的Move项,在对话框中选择Relocate the项为Part,右键点击右侧文本框选择Part,出现Guesses然后选择mass ,如图3-2所示。 图3-2 选择移动质量块 3.7 在Translate下方的数字栏中输入-100,或者输入100再单击前面的按钮,如图3-3所示; 图3-3 移动对话框
质量-弹簧-阻尼系统实验教学指导书 北京理工大学机械与车辆学院 2016.3
实验一:单自由度系统数学建模及仿真 1 实验目的 (1)熟悉单自由度质量-弹簧-阻尼系统并进行数学建模; (2)了解MATLAB 软件编程,学习编写系统的仿真代码; (3)进行单自由度系统的仿真动态响应分析。 2 实验原理 单自由度质量-弹簧-阻尼系统,如上图所示。由一个质量为m 的滑块、一个 刚度系数为k 的弹簧和一个阻尼系数为c 的阻尼器组成。系统输入:作用在滑块上的力f (t )。系统输出:滑块的位移x (t )。 建立力学平衡方程: m x c x kx f ??? ++= 变化为二阶系统标准形式: 22f x x x m ζωω?? ? ++= 其中:ω是固有频率,ζ是阻尼比。 ω= 2c m ζω= = 2.1 欠阻尼(ζ<1)情况下,输入f (t )和非零初始状态的响应: ()()sin()))] t t x t t d e ζωττζωττ +∞ --=? -= -+-?
2.2 欠阻尼(ζ<1)情况下,输入f(t)=f0*cos(ω0*t) 和非零初始状态的的响应: 022 3 00 22222 00 222222 2 ()cos(arctan()) 2f [(0)]cos() [()(2)] sin( t t x t t x e k e ζω ζω ζωω ω ωω ζωω ωωζωω - ? - =- - ++ -+ +) 输出振幅和输入振幅的比值:A= 3 动力学仿真 根据数学模型,使用龙格库塔方法ODE45求解,任意输入下响应结果。 仿真代码见附件 4 实验 4.1 固有频率和阻尼实验 (1)将实验台设置为单自由度质量-弹簧-阻尼系统。 (2)关闭电控箱开关。点击setup菜单,选择Control Algorithm,设置选择Continuous Time Control,Ts=0.0042,然后OK。 (3)点击Command菜单,选择Trajectory,选取step,进入set-up,选取Open Loop Step设置(0)counts, dwell time=3000ms,(1)rep, 然后OK。此步是为了使控制器得到一段时间的数据,并不会驱动电机运动。 (4)点击Data菜单,选择Data Acquisition,设置选取Encoder#1 ,然后OK离开;从Utility菜单中选择Zero Position使编码器归零。 (5)从Command菜单中选择Execute,用手将质量块1移动到2.5cm左右的位置(注意不要使质量块碰触移动限位开关),点击Run, 大约1秒后,放开手使其自由震荡,在数据上传后点击OK。 (6)点击Plotting菜单,选择Setup Plot,选取Encoder #1 Position;然后点击Plotting菜单,选择Plot Data,则将显示质量块1的自由振动响应曲线。(7)在得到的自由振动响应曲线图上,选择n个连续的振幅明显的振动周期,计算出这段振动的时间t,由n/t即可得到系统的频率,将Hz转化为rad/sec即为系统的振动频率ω。
湖北文理学院物理实验教学示范中心 实 验 报 告 学院 专业 班 学号: 姓名: 实验名称 简谐振动与阻尼振动的研究 实验日期: 年 月 日 实验室: N1-103 [实验目的]: 1. 验证在弹性恢复力作用下,物体作简谐振动的有关规律;测定弹簧的弹性系数K 和有效质量m. 2. 测定阻尼振动系统的半衰期和品质因数,作出品质因数Q 与质量M 的关系曲线。 [仪器用具]:仪器、用具名称及主要规格(包括量程、分度值、精度等) 气垫导轨、滑块、附加质量(2)、弹簧(4)、光电门(2)、数字毫秒计. [实验原理]:根据自己的理解用简练的语言来概括(包括简单原理图、相关公式等) 1.简谐振动 在水平气垫导轨上的滑块m 的两端连接两根弹性系数1k 、2k 近乎相等的弹簧,两弹簧的另一端分别固定在气轨的两端点。滑块的运动是简谐振动。其周期为: 2 122k k M T +== π ω π 由于弹簧不仅是产生运动的原因,而且参 加运动。因此式中M 不仅包含滑块(振子)的质量m ,还有弹簧的有效质量0m 。M 称为弹簧振子系统的有效质量。经验 证:0m m M += 其中 s m m 31 0=,s m 为弹簧质量。假设:k k k ==21则有周期: 22T πω= = 若改变滑块的质量m ?,则周期2T 与m ?成正比。222 4422M m T k k ππ?=+。以2T 为纵坐标,以m ?为横坐标,作2T -m ?曲线。则为一条斜率为242k π的直线。由斜率可以求出弹簧的弹性系数k 。求出弹性系数后再根据式22 42M T k π=求出弹簧的 有效质量。 2.阻尼振动 简谐振动是一种振幅相等的振动,它是忽略阻尼振动的理想情况。事实上,阻尼力不可避免,而抵抗阻力做功的结果,使振动系统的能量逐渐减小。因此,实验中发生的一切自由振动,振幅总是逐渐减小以至等于零的。这种振动称为阻尼振动。用品质因数(即Q 值),来反映阻尼振动衰减的特性。其定义为:振动系统的总能量E 与在一个周期中所损耗能 量E ?之比的π2倍,即 2E Q E π =?;通过简单推导也有: 12 ln 2 T Q T π= 2 1T 是 阻尼振动的振幅从 0A 衰减为 2 0A 所用时 间,叫做半衰期。测出半衰期就可以计算出品质因数Q 。在实验中,改变滑块的质量。作质量与品质因数的关系曲线。 [实验内容]: 简述实验步骤和操作方法 1. 打开气泵观察气泵工作是否正常,气轨出气孔出气大小是否均匀。 2. 放上滑块,调节气轨底座,使气轨处于水平状态。 3. 把滑块拉离平衡位置,记录下滑块通过光电门10次所用的时间。 4. 改变滑块质量5次,重复第3步操作。 5. 画出m T -2 关系曲线,.据m T -2关系曲线,求出斜率K ,并求出弹性系数k 。 6. 用天平测量滑块(附挡光片)、每个附加物的质量后;求出弹簧的有效质量。 7. 用秒表测量滑块儿的振幅从A 0衰减到A 0/2所用的时间2 1T ;求出系统的品质因数Q 8. 滑块上增至4个附加物,重复步骤7作出Q-m ?的关系曲线;
质量-弹簧-阻尼系统实验教学指导书 理工大学机械与车辆学院 2016.3
实验一:单自由度系统数学建模及仿真 1 实验目的 (1)熟悉单自由度质量-弹簧-阻尼系统并进行数学建模; (2)了解MATLAB 软件编程,学习编写系统的仿真代码; (3)进行单自由度系统的仿真动态响应分析。 2 实验原理 单自由度质量-弹簧-阻尼系统,如上图所示。由一个质量为m 的滑块、一个 刚度系数为k 的弹簧和一个阻尼系数为c 的阻尼器组成。系统输入:作用在滑块上的力f (t )。系统输出:滑块的位移x (t )。 建立力学平衡方程: m x c x kx f ??? ++= 变化为二阶系统标准形式: 22f x x x m ζωω?? ? ++= 其中:ω是固有频率,ζ是阻尼比。 ω= 2c m ζω= = 2.1 欠阻尼(ζ<1)情况下,输入f (t )和非零初始状态的响应: ()()sin()))] t t x t t d e ζωττζωττ +∞ --=? -= -+-?
2.2 欠阻尼(ζ<1)情况下,输入f(t)=f0*cos(ω0*t) 和非零初始状态的的响应: 022 3 00 22222 00 222222 2 ()cos(arctan()) 2f [(0)]cos() [()(2)] sin( t t x t t x e k e ζω ζω ζωω ω ωω ζωω ωωζωω - ? - =- - ++ -+ +) 输出振幅和输入振幅的比值:A= 3 动力学仿真 根据数学模型,使用龙格库塔方法ODE45求解,任意输入下响应结果。 仿真代码见附件 4 实验 4.1 固有频率和阻尼实验 (1)将实验台设置为单自由度质量-弹簧-阻尼系统。 (2)关闭电控箱开关。点击setup菜单,选择Control Algorithm,设置选择Continuous Time Control,Ts=0.0042,然后OK。 (3)点击Command菜单,选择Trajectory,选取step,进入set-up,选取Open Loop Step 设置(0)counts, dwell time=3000ms,(1)rep, 然后OK。此步是为了使控制器得到一段时间的数据,并不会驱动电机运动。 (4)点击Data菜单,选择Data Acquisition,设置选取Encoder#1 ,然后OK离开;从Utility菜单中选择Zero Position使编码器归零。 (5)从Command菜单中选择Execute,用手将质量块1移动到2.5cm左右的位置(注意不要使质量块碰触移动限位开关),点击Run, 大约1秒后,放开手使其自由震荡,在数据上传后点击OK。 (6)点击Plotting菜单,选择Setup Plot,选取Encoder #1 Position;然后点击Plotting 菜单,选择Plot Data,则将显示质量块1的自由振动响应曲线。 (7)在得到的自由振动响应曲线图上,选择n个连续的振幅明显的振动周期,计算出这段振动的时间t,由n/t即可得到系统的频率,将Hz转化为rad/sec即为系统的振动频率ω。
一.ADAMS软件简介 虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是对机械系统的运动学与动力学进行仿真的商用软件,由美国MDI (Mechnical Dynamics Inc.)开发,在经历了12个版本后,被美国MSC公司收购。ADAMS集建模、计算和后处理于一体,ADAMS有许多个模块组成,基本模块是View模块和Postprocess模块,通常的机械系统都可以用这两个模块来完成,另外在ADAMS中还针对专业领域而单独开发的一些专用模块和嵌入模块,例如专业模块包括汽车模块ADAMS/Car、发动机模块ADAMS/Engine、火车模块ADAMS/Rail、飞机模块ADAMS/Aircraft等;嵌入模块如振动模块ADAMS/Vibration、耐久性模块ADAMS/Durability、液压模块ADAMS/Hydraulic、控制模块ADAMS/Control和柔性体模块ADAMS/AutoFlex等[3]。 1.1ADAMS软件概述 ADAMS是以计算多体系统动力学(Computational Dynamics of Multibody Systems)为基础,包含多个专业模块和专业领域的虚拟样机开发系统软件,利用它可以建立复杂机械系统的运动学和动力学模型,其模型可以是刚体的,也可以是柔性体,以及刚柔混合体模型。如果在产品的概念设计阶段就采取ADAMS 进行辅助分析,就可以在建造真实的物理样机之前,对产品进行各种性能测试,达到缩短开发周期、降低开发成本的目的。 ADAMS,即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems)该软件是美国MDI公司(Mechnical Dynamics Inc.)开发的虚拟样机分析软件。目前,ADAMS已经被全世界各行各业的数百家主要制造商采用。根据1999年机械系统动态分析软件国际市场份额的统计资料,ADAMS 软件销售总额近八千万美元、占据了51%的份额。 ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,
阻尼振动与受迫振动实验报告 一、实验目的 (一)观察扭摆的阻尼振动,测定阻尼因数。 (二)研究在简谐外力矩作用下扭摆的受迫振动,描绘扭摆在不同阻尼的情况下的共振曲线(即幅频特性曲线)。 (三)描绘外加强迫力矩与受迫振动之间的位相随频率变化的特性曲线(即相频特性曲线)。 (四)观测不同阻尼对受迫振动的影响。 二、实验仪器 扭摆(波尔摆)一套,秒表,数据采集器,转动传感器。 三、实验任务 1、调整仪器使波耳共振仪处于工作状态。 2、测量最小阻尼时的阻尼比ζ和固有角频率ω0。 3、测量其他2种或3种阻尼状态的振幅,并求ζ、τ、Q和它们的不确定度。 4、测定受迫振动的幅频特性和相频特性曲线。 四、实验步骤 1、打开电源开关,关断电机和闪光灯开关,阻尼开关置于“0”档,光电门H、I可以手动微调,避免和摆轮或者相位差盘接触。手动调整电机偏心轮使有机玻璃转盘F上的0位标志线指示0度,亦即通过连杆E和摇杆M使摆轮处于平衡位置。然后拨动摆轮使偏离平衡位置150至200度,松开手后,检查摆轮的自由摆动情况。正常情况下,震动衰减应该很慢。 2、开关置于“摆轮”,拨动摆轮使偏离平衡位置150至200度后摆动,由大到小依次读取显示窗中的振幅值θj;周期选择置于“10”位置,按复位钮启动周期测量,停止时读取数据10 T。 d 并立即再次启动周期测量,记录每次过程中的10 T的值。 d (1)逐差法计算阻尼比ζ; (2)用阻尼比和振动周期T d计算固有角频率ω0。 3、依照上法测量阻尼(2、3、4)三种阻尼状态的振幅。求出ζ、τ、Q和它们的不确定度。 4、开启电机开关,置于“强迫力”,周期选择置于“1”,调节强迫激励周期旋钮以改变电机运动角频率ω,选择2个或3个不同阻尼比(和步骤3中一致),测定幅频和相频特性曲线,注意阻尼比较小(“0”和“1”档)时,共振点附近不要测量,以免振幅过大损伤弹簧;每次调节电机状态后,摆轮要经过多次摆动后振幅和周期才能稳定,这时再记录数据。要求每
a m s振动分析实例中文 版 公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]
1.问题描述 研究太阳能板展开前和卫星或火箭分离前卫星的运行。研究其发射振动环境及其对卫星各部件的影响。 2.待解决的问题 在发射过程中,运载火箭给敏感部分航天器部件以高载荷。每个航天器部件和子系统必学设计成能够承受这些高载荷。这就会带来附加的质量,花费高、降低整体性能。更好的选择是设计运载火箭适配器(launch vehicle adapter)结构。 这部分,将设计一个(launch vehicle adapter)的隔离mount,以在有效频率范围降低发射震动传到敏感部件的部分。关心的敏感部件在太阳能板上,对70-100HZ的输入很敏感,尤其是垂直于板方向的。 三个bushings将launch vehicle adapter和火箭连接起来。Bushing的刚度和阻尼影响70-100HZ范围传递的震动载荷。所以设计问题如下: 找到运载火箭适配器系统理想刚度和阻尼从而达到以下目的: 传到航天器的垂直加速度不被放大; 70-100HZ传递的水平加速度最小。 3.将要学习的 Step1——build:在adams中已存在的模型上添加输入通道和振动执行器来时系统振动,添加输出通道测量响应。 Step2——test:定义输入范围并运行一个振动分析来获得自由和强迫振动响应。 Step3——review:对自由振动观察模态振型和瞬态响应,对强迫振动,观察整体响应动画,传递函数。 Step4——improve:在横向添加力并检查传递加速度,改变bushing的刚度阻尼并将结果作比较。添加频域测量供后续设计研究和优化使用。
弹簧-质量-阻尼模型
弹簧-质量-阻尼系统 1 研究背景及意义 弹簧-质量-阻尼系统是一种比较普遍的机械振动系统,研究这种系统对于我们的生活与科技也是具有意义的,生活中也随处可见这种系统,例如汽车缓冲器就是一种可以耗减运动能量的装置,是保证驾驶员行车安全的必备装置,再者在建筑抗震加固措施中引入阻尼器,改变结构的自振特性,增加结构阻尼,吸收地震能量,降低地震作用对建筑物的影响。因此研究弹簧-质量-阻尼结构是很具有现实意义。 2 弹簧-质量-阻尼模型的建立 数学模型是定量地描述系统的动态特性,揭示系统的结构、参数与动态特性之间关系的数学表达式。其中,微分方程是基本的数学模型, 不论是机械的、液压的、电气的或热力学的系统等都可以用微分方程来描述。微分方程的解就是系统在输入作用下的输出响应。所以,建立数学模型是研究系统、预测其动态响应的前提。通常情况下,列写机械振动系统的微分方程都是应用力学中的牛顿定律、质量守恒定律等。 弹簧-质量-阻尼系统是最常见的机械振动系统。机械系统如图2.1所示,
图2.1 弹簧-质量-阻尼系统简图 其中1 m ,2 m 表示小车的质量,i c 表示缓冲器的粘滞摩擦系数,i k 表示弹簧的弹性系数,i F (t )表示小车所受的外力,是系统的输入即i U (t )=i F (t ),i X (t)表示小车的位移,是系统的输出,即i Y (t )=i X (t),i=1,2。设缓冲器的摩擦力与活塞的速度成正比,其中1m =1kg ,2 m =2kg ,1k =3k =100N/cm ,2k =300N/cm ,1c =3 c =3N ?s/cm ,2 c =6N ?s/cm 。 由图 2.1,根据牛顿第二定律,,建立系统的动力学模型如下: 对1 m 有: (2-1) 对2 m 有: (2-2) 3 建立状态空间表达式 令3 1421122 ,,,x x x x u F u F ====,则原式可化为:
竭诚为您提供优质文档/双击可除 阻尼运动实验报告 篇一:《阻尼振动与受迫振动》实验报告 《阻尼振动与受迫振动》实验报告 工程物理系核41崔迎欢20XX011787 一.实验名称:阻尼振动与受迫振动二.实验目的 1.观测阻尼振动,学习测量振动系统基本参数的方法;2.研究受迫振动的幅频特性和相频特性,观察共振现象;3.观测不同阻尼对受迫振动的影响。三..实验原理1.有粘滞阻尼的阻尼振动 弹簧和摆轮组成一振动系统,设摆轮转动惯量为J,粘滞阻尼的阻尼力矩大小定义为角速度dθ/dt与阻尼力矩系数γ的乘积,弹簧劲度系数为k,弹簧的反抗力矩为-kθ。忽略弹簧的等效转动惯量,可得转角θ的运动方程为d2?d?J2???k??0dtdt 记ω0为无阻尼时自由振动的固有角频率,其值为ω 0k/J,定义阻尼系数β =γ/(2J),则上式可以化为:
d2?d? ?2??k??02dtdt 2 小阻尼即?2??0?0时,阻尼振动运动方程的解为 ?? t???iexp(??t)cos ??i(*)? 由上式可知, 阻尼振动角频率为?d?阻尼振动周期为Td?2? 2.周期外力矩作用下受迫振动的解 在周期外力矩mcosωt激励下的运动方程和方程的通解分别为 d d2?d?J2???k??mcos?tdtdt ??t???iexp? ??t?cos ??i??mcos??t??? ? 这可以看作是状态(*)式的阻尼振动和频率同激励源频率的简谐振动的叠加。 一般t>>τ后,就有稳态解 ??t???mcos??t???
稳态解的振幅和相位差分别为 ?m? ??arctan 2?? 22 ?0?? 其中,φ的取值范围为(0,π),反映摆轮振动总是滞后于激励源支座的振动。 3.电机运动时的受迫振动运动方程和解 弹簧支座的偏转角的一阶近似式可以写成 ??t???mcos?t 式中α m 是摇杆摆幅。由于弹簧的支座在运动,运动支座是激励源。弹簧总转 角为????t?????mcos?t。于是在固定坐标系中摆轮转角θ的运动方程为 d2?d?J2???k????mcos?t??0dtdt 也可以写成 d2?d?J2???k??k?mcos?tdtdt 于是得到 2
11整车仿真 (234) 11.1整车装配模型 (234) 11.2整车仿真 (235) 11.3后处理曲线读取 (237) 11.4动画演示 (237) 11.4录制动画演示 (241) 11.5整车仿真调试 (241) 附例 (242) 233
《整车仿真分析篇》 11整车仿真 在Adams/Car环境下进行整车动力学仿真必须包含的子系统有: 前/后悬架 转向系统 前/后轮胎 车身 此外Adams/Car还会包含一个Test Rig(测试台)。在开环(Open-loop)、闭环(Close-loop)和准静态分析(Quasi-static)中必须选择._MDI_SDI_TESTRIG。用户可以在整车模型中包含其它的子系统,如制动子系统、动力系统等。 11.1整车装配模型 在Standard Interface界面菜单里选择File>New>Full_Vehicle Assembly。 在出现的对话框里输入自己取的整车装配体名称,在各个子系统栏目里右击鼠标,在自己的数据库里找到相应的各个子系统: 234
235 点击OK ,如图所示: 本例分析以双移线仿真为例,没有添加动力总成部分。 11.2整车仿真 从菜单选择Simulation>Full_Vehicle Analysis>Course Events>ISO Lane_Change 。
设定对话框如图所示: 点击OK,如果运算成功的话信息窗口如下: 236
11.3后处理曲线读取 方法和步骤请参照悬架分析篇 11.4动画演示 动画演示有两种方式: Review>Animation Controls 1)从菜单选择Array 设定动画控制如下: 237
实验十三 阻尼振动的研究 实验目的 1.研究振动系统所受阻尼力和速度成正比时,其振幅随时间的衰减规律。 2.测量振动系统的半衰期和品质因数。 3.测量滑块儿的阻尼常数。 实验仪器 气垫导轨,滑块儿,光电计时装置,弹簧两组,附加物4块,天平,秒表等。 实验原理 简谐振动是一种振幅相等的振动,它是忽略阻尼振动的理想情况。事实上,阻尼力不可避免,而抵抗阻力做功的结果,使振动系统的能量逐渐减小。因此,实验中发生的一切自由振动,振幅总是逐渐减小以至等于零的。这种振动称为阻尼振动。如果物体的速度v 不大,实验结果证明,阻尼力f 和v 成正比而方向相反。设物体在x 轴上振动,则 dt dx v f αα?=?= (2-13-1) 式中α为阻尼常数。 气垫导轨上,滑块儿和弹簧组成的振动系统,在空气阻力作用下,作的是阻尼振动。若质量为m (包含档光片)的滑块儿,在弹力-kx 、阻尼力dt dx α?的作用下产生的加速 度为2 2 dt x d ,由牛顿第二定律得 dt dx kx dt x d m α??=22 (2-13-2) 式中k 为弹簧的倔强系数。令m k =2 0ω,m αβ=2, (2-13-2) 式改写成 022 02 2=++x dt dx dt x d ωβ (2-13-3) 式中β为阻尼因数;0ω为振动系统的固有的圆频率。当2 02ωβ<时,(2-13-3)式的 解为 )cos(0o f t t e A x ?ωβ+=?? (2-13-4) 公式(2-13-4)称为阻尼振动方程,其中220βωω?=f 为振动的圆频率,A 0、0?分别为振幅和初相位。由此可见,滑块儿作阻尼振动时,振幅应按指数规律衰减,衰减的快慢取决于β。阻尼振动的周期
Getting Started Using ADAMS/Vibration Overview ADAMS/Vibration, part of the MSC.ADAMS? suite of software, performs frequency-domain analyses. ADAMS/Vibration is a plugin to the interface products ADAMS/Aircraft, ADAMS/Car, ADAMS/Engine, ADAMS/Rail, and ADAMS/View. It can also be used standalone with an ADAMS/Solver model. Using ADAMS/Vibration, you can study forced vibrations within your MSC.ADAMS models. You can also use the results from ADAMS/Vibration in noise/vibration/harshness (NVH) studies to predict the impact of vibrations in automobiles, trains, planes, and so on. ADAMS/Vibration can run in two modes: interactive and batch. This guide focuses on using ADAMS/Vibration in our MSC.ADAMS interface products, such as ADAMS/View (interactive mode). For information on batch mode analysis, refer to the ADAMS/Vibration online help. This guide includes the following sections: ■Introducing the Problem,3 ■Building the Model,9 ■T esting the Model,19 ■Reviewing the Model,23 ■Improving Y our Design,39 ■Optimizing the Model,45
气轨上弹簧振子的简谐振动 目的要求: (1)用实验方法考察弹簧振子的振动周期与系统参量的关系并测定弹簧的劲度系数和有效质量。 (2)观测简谐振动的运动学特征。 (3)测量简谐振动的机械能。 仪器用具: 气轨(自带米尺,2m,1mm),弹簧两个,滑块,骑码,挡光刀片,光电计时器,电子天平(0.01g),游标卡尺(0.05mm),螺丝刀。 实验原理: (一)弹簧振子的简谐运动过程: 质量为m1的质点由两个弹簧与连接,弹簧的劲度系数分别 为k1和k2,如下图所示: 当m1偏离平衡位置x时,所受到的弹簧力合力为 令 k=,并用牛顿第二定律写出方程 解得 X=Asin() 即其作简谐运动,其中 在上式中,是振动系统的固有角频率,是由系统本身决定的。m=m 1+m0是振动系统的有效质量,m 0是弹簧的有效质量,A是振幅,是初相位,A和由起始条件决定。系统的振动周期为
通过改变测量相应的T,考察T 和的关系,最小二乘法线性拟合求出k 和 (二)简谐振动的运动学特征: 将()对t 求微分 ) 可见振子的运动速度v 的变化关系也是一个简谐运动,角频率为,振幅为,而且v 的相位比x 超前 .消去t,得 v2=ω02(A2?x2) x=A时,v=0,x=0 时,v 的数值最大,即 实验中测量x和v 随时间的变化规律及x和v 之间的相位关系。 从上述关系可得 (三)简谐振动的机械能: 振动动能为 系统的弹性势能为 则系统的机械能 式中:k 和A均不随时间变化。上式说明机械能守恒,本实验通过测定不同位 置x上m 1的运动速度v,从而求得和,观测它们之间的相互转换并验证机 械能守恒定律。 (四)实验装置: 1.气轨设备及速度测量 实验室所用气轨由一根约2m 长的三角形铝材做成,气轨的一端堵死,另 一端送入压缩空气,气轨的两个方向上侧面各钻有两排小孔,空气从小孔喷出。把用合金铝做成的滑块放在气轨的两个喷气侧面上,滑块的内表面经过精加工
Engineering MECHANICS,Vol.14,2007,No.4,p.259–268259 VIBRATION ANALYSIS OF ROTARY DRIER Frantiˇs ek Palˇc′a k*,Martin Vanˇc o* In this paper the transfer of vibration from motor to the bottom group of rotary drier is analyzed in the ADAMS/Vibration module environment.Excitation from unba- lanced motor shaft is transferred through bearings mounted in side shields to the transmission device and bottom plate.Output results were time-domain courses of displacement,velocity,acceleration and transfer functions,frequency response func- tions and modal coordinates corresponding to excitation frequency. Key words:vibration,rotary drier,frequency response 1.Description of goals The goal of vibration analysis of rotary drier developed by Bosch Siemens Hausgeraete, Michalovce was the evaluation of vibration transfer from motor to the bottom plate.Ob-tained results should be used as comparative values for experimental results from point of view of allowed level of vibration.To obtain physically relevant results for basic insight of its functional and vibrational properties3D model of drier bottom plate(Fig.1)includes bearings,transmission-device with belt and bottom plate with attachment elements. Fig.1:Scheme of drier’s bottom plate 2.Task steps The requested research oriented to the virtual dynamic analyses of mechanical system with gross motions dictates to adopt mechanical system simulation technology to perform *Assoc.Prof.F.Palˇc′a k,Ph.D.,MSc.M.Vanˇc o,Strojn′?cka fakulta,Slovensk′a technick′a univerzita v Brati-slave,N′a m.slobody17,81231Bratislava