固态传感器及其集成化
实验报告
实验一叉指电容式开环加速度计原理
1. 实验目的
(1)通过实验熟悉微加速度计的工作原理及其应用,进一步加深对固态传感器概念与特性的理解。
(2)学习加速度计整体电路模块的设计和仿真。
2. 开环电容式加速度计原理简介
叉指式微加速度计是一种典型的微机电系统产品,由于它的高灵敏度、好的直流响应、低噪声、低漂移、对温度的敏感性低、低能耗、结构简单的优点,使其有着广泛的应用前景,也是目前国内外攻关的热点之一.微加速度计涉及到多学科领域的相互作用,如何用模型来较为准确地反映各个领域间的相互作用关系以及如何实现机电混合系统的接口,是设计的关键,一直是比较难于解决的问题.论文采用了一种新的建模仿真法,即原理级描述仿真法,建立了叉指式微加速度计的参数化机电混合系统模型,对其进行分析研究.该文研究了弹性梁参数对加速度计结构谐振频率、灵敏度、交叉耦合误差的影响趋势,在此基础上给出了一组优化了的弹性梁参数;分别研究了开环和闭环系统检测方式下静电力作用对加速度计性能的影响、吸附现象及弹簧的静电软化现象,在此基础上给出了偏置电压、检测激励信号的取值规则;研究了叉指式微加速度计的动态响应特性,在此基础上优化了电路结构及参数.论文的主要研究结论与实验结果一致.
2.1. 微结构的工作原理
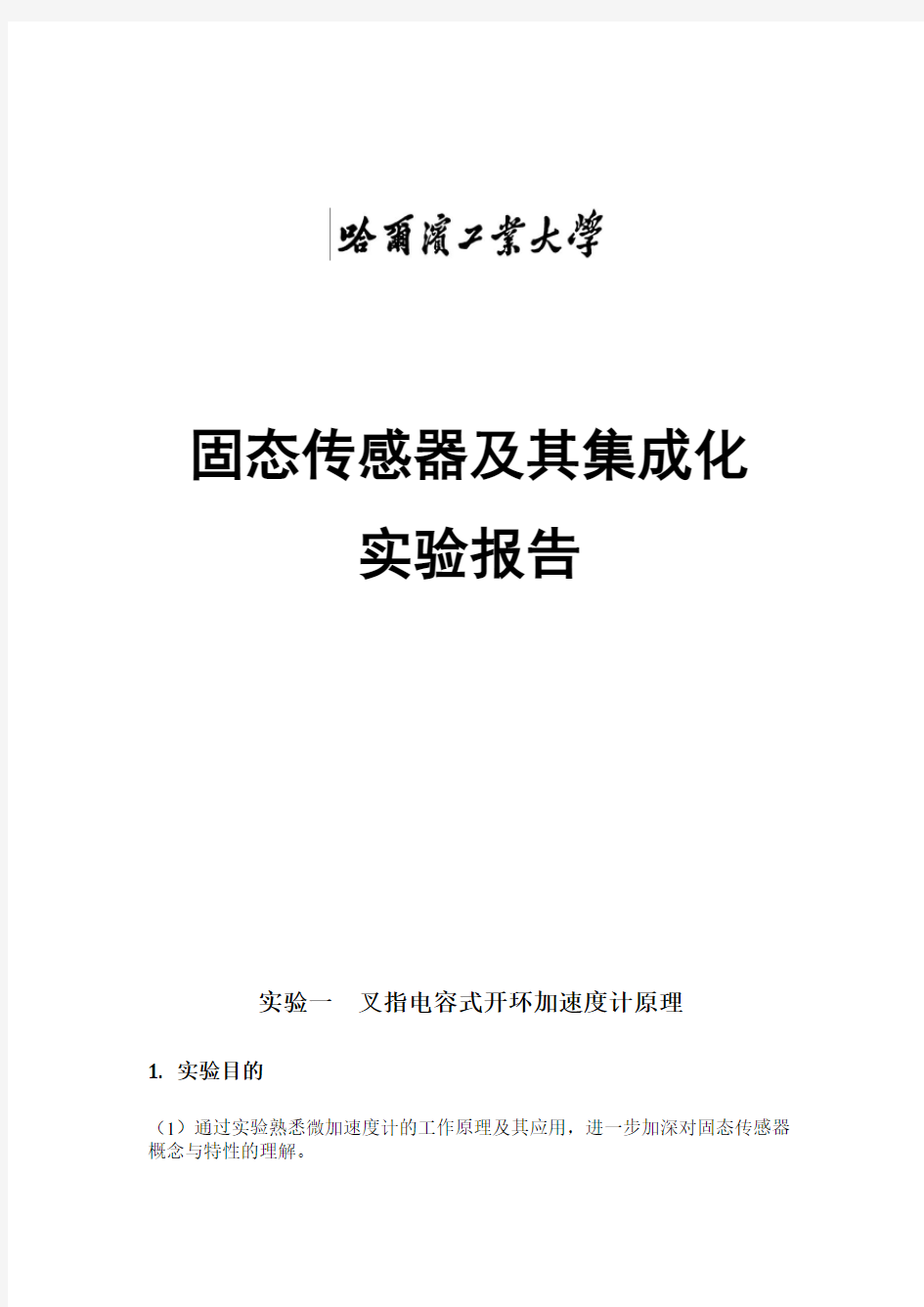
加速度传感器是一种惯性传感器,其基本结构是由弹性梁和惯性质量组成的转换系统,可以等效成由质量、弹簧组成的单自由度二阶阻尼振动系统,利用系统的在低频区的线性频率响应实现对被测参量——加速度的测量。加速度传感器的机械部分可以表征为如图2-1所示的系统结构。
图2-1 加速度传感器的机械系统原理
其中m为振动块质量,R为阻尼系数,k为弹性系数,a为加速度,根据牛顿第二定律可建立振动微分方程:
(2-1) 将仿真(2-1)进行拉普拉斯变换:
(2-2)
(2-3) 其中为固有谐振频率,为品质因数。为了方便使用,我们把单位加速度作用下的质量块位移定义为加速度传感器结构的灵敏度。则}
(2-4) 时,灵敏度是个常数,当与梁的谐振频率的平方成反比在接近时,灵敏度要增大Q倍,在时,灵敏度是频率平方的倒数。一般希望灵敏度在整个工作范围内为常数,因而应使梁的谐振频率远远大于工作频率。从式(2-3)中可以看出高的灵敏度
可以通过加大质量块的质量m和减少弹性系数k来得到,但高灵敏度和大的量程是矛盾的,因此Q值也不能太高。总之在设计敏感单元时要统一考虑,进行折衷。
2.2. 电容检测原理
电容式加速度传感器的敏感元差分电容如图所示,在没有加速度时,等效电容C1=C2。当有加速度时,等效差分电容发生变化,即一个变大一个变小。这时差分电容变化?C=C1-C2。
加速度传感器受加速度作用后输出信号表征为传感器的等效差分电容的变化量?C,并且加速度信号与?C近似成正比的关系。所以要把?C检测出来,就能把加速度检测出来。然而电容的变化量很小,怎样检测到微小的电容变化量就是检测电路研究与设计的关键。
电容式加速度传感器敏感元差分电容模型图
加速度计可分为闭环加速度计和开环加速度计。闭环加速度计也可称为力平衡加速度计或者伺服加速度计。它的实现是基于静电力调节原理。开环检测电路与闭环检测电路相比具有结构简单、芯片面积小、生产成本低、功耗小、信噪比好等优点,但是也同时存在线性度较差的缺点,这是因为开环的检测结构ΔC/C要大些,为了解决这个问题,可以把悬臂梁的弹性变大且减小测量范围来实现。根据综合分析和比较,本检测集成电路最终设计为开环的检测结构。
由于系统的噪声在低频时较大,信噪比低,而在高频段信噪比相对比较高,为了完成对微小信号的测量,就应降低系统噪声的影响,对传感器信号进行调制能比较好的解决这一问题。开环检测可以直接把两路反向等频等幅的载波信号加到两个定极板上,当有加速度信号作用在活动梁上时,因加速度信号频率与高频与载波频率相比故实际上此时传感器动极板输出的信号就是己经把加速度信号经过调制的电压信号。考虑到从传感器输出的电压信号驱动能力很弱,传感器后加一级缓冲器放大器来提高它的驱动能力,适当设置放大器的放大倍数,这样可以减少后级电路在传感器输出端的等效噪声,从而提高系统的检测能力。最终要得到的信号是与加速度成线性关系的电压信号,因此需要对缓冲放大器输出的高频信号进行解调,从中获得所需低频信号。
图2-3所示为叉指结构电容式加速度传感器的敏感单元及其等效电路图。敏感单元的固定电极作为驱动端,接驱动信号,而活动电极作为公共电极输出电信号。在没有加速度信号输入时,固定电极与活动电极的间距均为d0,等效电容C1,C2相同;当有外加加速度,会引起活动电极和固定电极之间的空隙d0改变,使等效电容发生差分变化,即一个变大一个变小。通过施加驱动信号将电容值的变化转换为电压的变化,实现加速度信号的测量。
图2-2 叉指式敏感单元示意和等效电路
假设在没有加速度输入时,两固定电极与活动电极的0间距都为d 0,则必有C 1=C 2=C 0,当有外加加速度输入时,会引起活动电极和固定电极之间的空隙d0改变△d ,从而改变等效电容,使得C 1≠C 2。如果在固定电极上加上幅度相等,而相位不等的直流电压Vin=Vin+=-Vin-时,可以得出公共电极(活动梁)上的输出电压V 0。有:
(2-5)
(2-6)
在实际的单电源电路中,加在图2-3 b)差分电容上的电压Vin+、Vin-并不满足推导出式Vin =Vin+=-Vin-,而是|Vin+|≠|V i n-|且Vin+、Vin- ≥0。考虑到差分电容式加速度传感器中活动梁的位移X 就是活动梁偏离平衡位置的位移△d 。因此在梁的工作范围内,输出电压Vo 与驱动电压Vin+、Vin-的关系应是: (2-7) 2.2. 信号调理集成电路工作原理
信号处理电路是由自检测电路,时钟发生器,梁激励电路,偏置电压源,电流产生器,前置放大器,解调器及低频放大滤波器等七个部分组成。在本电路中,时序电路产生激励信号,加在加速度传感器固定电极上,将加速度信号转换为较高频率的电信号。经前置放大器放大,解调器解调,得到反映加速度信号的低频电信号,再经低频放大器放大,滤波器滤波得到满足输出要求的模拟信号VOUT 。
000000000()()A A Vin d d d d d d d d d Vo Vin Vin A A d d d d d d d d d ξξξξ--?+?+?-+??===+?+-?+-?+?020000
()in in offset in offset offset V a C d V V V V V V C d d ω???=+=+=+
图2-3集成加速度传感器电路的系统
3. 实验步骤及结论
利用Malab搭建系统结构图,并施加信号激励,仿真输出结果。其系统级模型图如下图所示。
图3-1 电容式加速度计系统模块图
3.1. 模型电路分析
物体运动所产生的位移经过表头后将物体的加速度转换为电信号,然后对信号进行采样,并且加入了其它的非理想因素,包括时钟抖动、运放噪声以及KT/C 噪声。对其进行相位补偿保证稳定性,然后对其进行滤波。同时将输出信号反馈到输入端。其信号输出如下图所示。
图3-2输出端信号PSD图
结果分析:所施加信号为频率为61Hz、幅度为9.8V的正弦信号,在最终的输出PSD中设置其通带带宽为1000Hz。从输出的PSD中可以看出,其最大幅度信号的频率约60Hz,通带内的信噪比为93.4dB,有效位约为15位。由此可以得出,电路实现了信号处理功能。但是最终的信号幅度有所衰竭,需要在后级加入放大器对信号进行放大。
以上是滤波器的输出波形,由图可见输出波形是经采样后形成的波形,要想获得原信号还需对其解调。
4. 思考题
4.1. 闭环加速度计如何建立
图4-1 微加速度计闭环检测电路原理图
微加速度计的闭环检测原理如图4-1所示,在原理图中添加了前馈和反馈电路。将原始的输入信号前馈到乘法器的输入端对信号进行解调然后经过滤波得到最终的输出信号,然后将输出信号反馈到输入端从而使系统达到稳定状态。在系统级设计中也有体现。
4.2. 自检测功能如何建立
自检测功能即在没有外在加速度的情况下,通过自身发生运动然产生加速度完成自己功能的检测。为实现此功能,可以在活动电极上引入附加的外接电极。当固定电极施加固定电压,利用外接电极对活动极板充电,那么活动极板带电荷后就会在固定极板产生的电场中运动从而产生加速度。
实验二振动式微机械陀螺原理
1. 实验目的
(1)加强对微机械陀螺加速度计的工作原理及其应用的认识与了解,进一步加深对固态传感器概念与特性的理解。
(2)学习利用Matlab软件对其陀螺系统模型进行建模设计与仿真。
2. 实验原理
2.1. 哥式加速度与陀螺力距
机械陀螺的结构图如图2-1所示,在惯性系中观察处于旋转运动的非惯性系中的运动物体,该物体的运动既包括物体相对于旋转参考系的运动又包括旋转参考系相对于惯性系的旋转运动。对其进行运动分析,简图如图2-2所示。