焊接机器人
焊接机器人系统的组成和分类
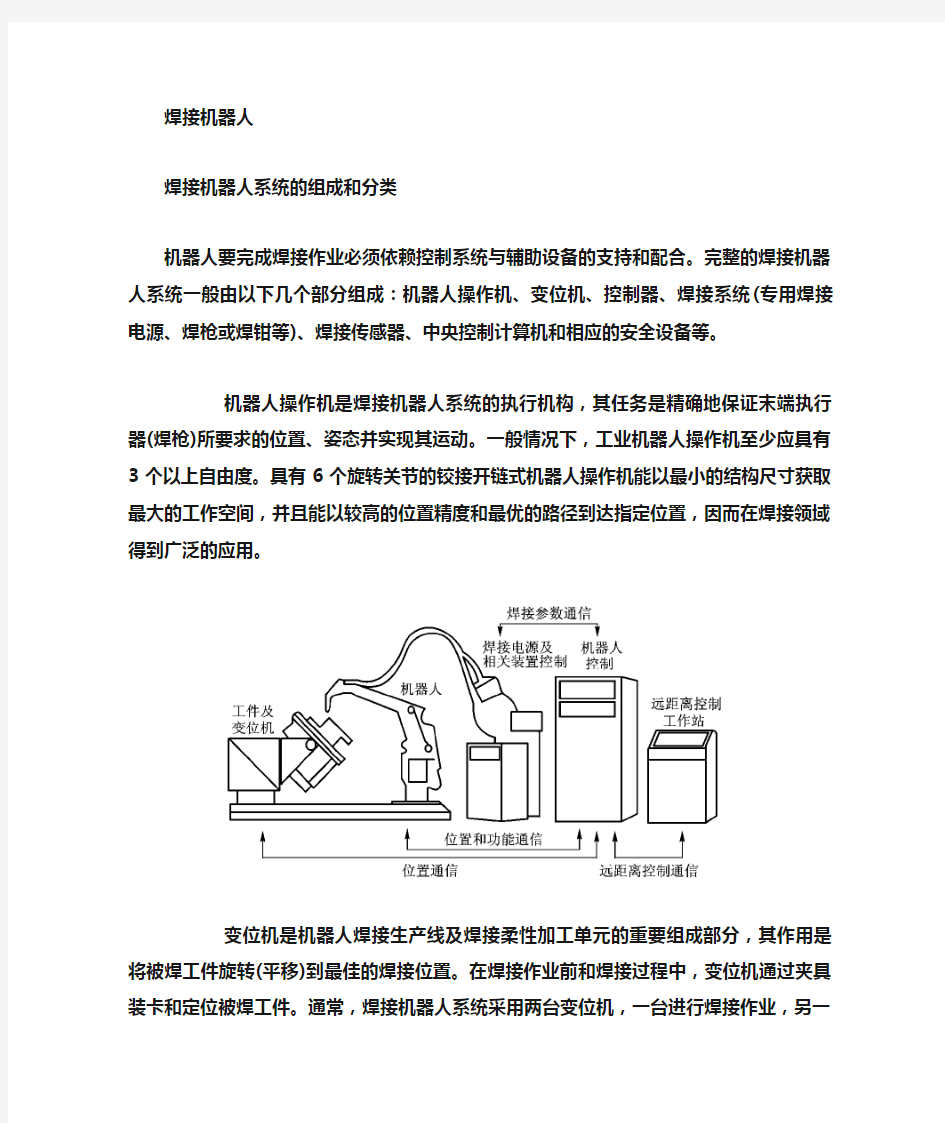
机器人要完成焊接作业必须依赖控制系统与辅助设备的支持和配合。完整的焊接机器人系统一般由以下几个部分组成:机器人操作机、变位机、控制器、焊接系统(专用焊接电源、焊枪或焊钳等)、焊接传感器、中央控制计算机和相应的安全设备等。
机器人操作机是焊接机器人系统的执行机构,其任务是精确地保证末端执行器(焊枪)所要求的位置、姿态并实现其运动。一般情况下,工业机器人操作机至少应具有3个以上自由度。具有6个旋转关节的铰接开链式机器人操作机能以最小的结构尺寸获取最大的工作空间,并且能以较高的位置精度和最优的路径到达指定位置,因而在焊接领域得到广泛的应用。
变位机是机器人焊接生产线及焊接柔性加工单元的重要组成
部分,其作用是将被焊工件旋转(平移)到最佳的焊接位置。在
焊接作业前和焊接过程中,变位机通过夹具装卡和定位被焊工
件。通常,焊接机器人系统采用两台变位机,一台进行焊接作
业,另一台则完成工件装卸。
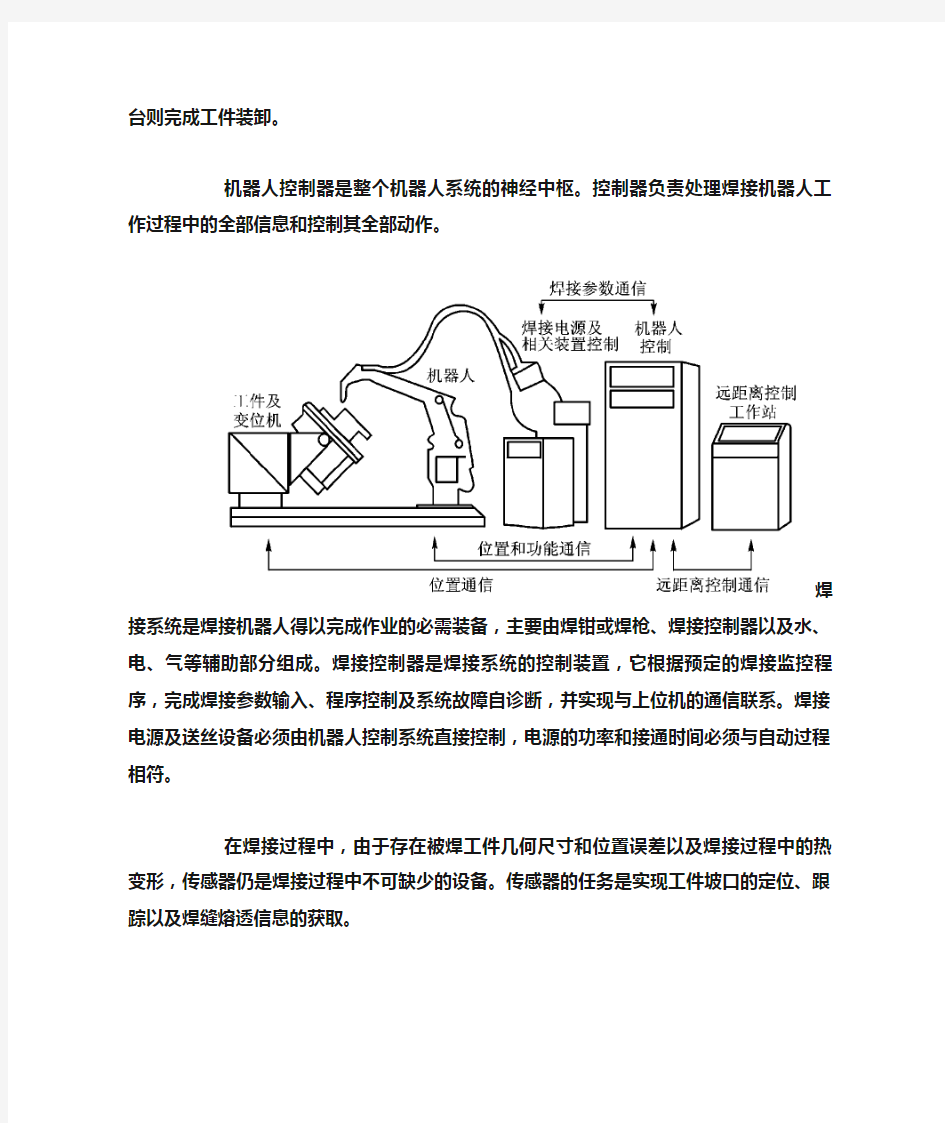
机器人控制器是整个机器人系统的神经中枢。控制器负责处
理焊接机器人工作过程中的全部信息和控制其全部动作。
焊接系统是焊接机器人得以完成作业的必需装备,主要由焊钳或焊枪、焊接控制器以及水、电、气等辅助部分组成。焊接控制器是焊接系统的控制装置,它根据预定的焊接监控程序,完成焊接参数输入、程序控制及系统故障自诊断,并实现与上位机的通信联系。焊接电源及送丝设备必须由机器人控制系统直接控制,电源的功率和接通时间必须与自动过程相符。
在焊接过程中,由于存在被焊工件几何尺寸和位置误差以及焊接过程中的热变形,传感器仍是焊接过程中不可缺少的设备。传感器的任务是实现工件坡口的定位、跟踪以及焊缝熔透信息的获取。
中央控制计算机(上位机)在工业机器人向系统化、PC化和网络化的发展过程中发挥着重要的作用。通过相应接口与机器人控制器相连接,中央控制计算机主要用于形成通信网络,同时与传感系统相配合,实现焊接路径和参数的离线编程、焊接专家系统的应用及生产数据的管理。
安全设备是焊接机器人系统安全运行的重要保障,主要包括驱动系统过热自断电保护、动作超限位自断电保护、超速自断电保护、机器人系统工作空间干涉自断电保护及人工急停断电保护等,它们起到防止机器人伤人或周边设备的作用。
按用途焊接机器人可分为弧焊机器人和点焊机器人。
弧焊机器人在许多行业中得到广泛应用,是工业机器人最大的应用领域。必须是轨迹控制机器人。焊枪应跟踪工件焊道运动,运动过程中
速度稳定性和轨迹精度是重要指标。焊枪姿态对焊缝质量也有一定影响,希望焊枪姿态的可调范围尽量大。
点焊机器人系统典型应用领域是汽车工业。可以是点位控制机器人。汽车车体制造约60%的焊点是由机器人来完成的
弧焊机器人工作站
弧焊机器人工作站按功能和复杂程度不同可分为:无变位机的普通弧焊机器人工作站、不同变位机与弧焊机器人组合的工作站和弧焊机器人与周边设备协调运动的工作站。
一、普通弧焊机器人工作站
凡是焊接时工件可以不用变位,而机器人的活动范围又能达到所有焊缝或焊点位置的情况,都可以采用普通弧焊机器人工作站。它是一种能用于焊接生产且具有最小组成的一套弧焊机器人系统。
普通弧焊机器人工作站一般由弧焊机器人(包括机器人本体、机器人控制柜、示教盒、弧焊电源和接口、送丝机、焊丝盘支架、送丝软管、焊枪、防撞传感器、操作控制盘及各设备间相连接的电缆、气管和冷却水管等)、机器人底座、工作台、工件夹具、围栏、安全保护设施和排烟罩等部分组成,必要时可再加一套焊枪喷嘴清理及剪丝装置。
二、不同变位机与弧焊机器人组合的工作站
这里所说工作站是不需要变位机与机器人协调运动的机器人工作站。这种工作站比普通弧焊机器人工作站要复杂一些。根据工件结构和工艺要求的不同,所配套的变位机与弧焊机器人也有不同的组合形式。它应用范围最广,应用数量也最多。
1. 单轴变位机与弧焊机器人组合的工作站
一种塞拉门框架机器人焊接工作站,用于焊接塞拉门框架。该工作站由两套伺服控制头、尾架单轴变位机、两套焊接可翻转夹具、一套机器人本体、焊接控制系统及移动滑台等组成。
图塞拉门框架机器人工作站简图(P221)
2. 旋转-倾斜变位机与弧焊机器人组合的工作站
图两台两轴变位机和弧焊机器人组成的工作站。(P222)
它可以形成两个工位。但对由两台两轴变位机组成的工作站来说,操作者装卸工件时,需在两个变位机之间来回走动,每天要走许多路;但工件焊接时都能作倾斜变位,又可作旋转(自转)运动,有利于保证焊接质量。
2. 旋转-倾斜变位机与弧焊机器人组合的工作站
图一台五轴双L型变位机和弧焊机器人组成的工作站。(P222)
这两种方案都可以形成两个工位。但对由两台两轴变位机组成的工作站来说,操作者装卸工件时,需在两个变位机之间来回走动,每天要走许多路;而对于用一台五轴双L型变位机的方案,就没有这个缺点了,设备投资较多。无论哪一种组合方案,工件焊接时都能作倾斜变位,又可作旋转(自转)运动,有利于保证焊接质量。
3. 翻转变位机与弧焊机器人组合的工作站
推土机台车架弧焊机器人工作站,采用两台翻转变位机形成两个工位。为了使机器人能达到两个翻转变位机上工件的各个焊接位置,机器人安放在两个组成十字形的滑轨上,使之能沿工件长度方向和两个翻转变位机之间的方向移动。因工件又重又长,重心又偏向一侧,而且组装时只进行简单的定位焊,为了避免工件翻转时受力过大使定位焊点开裂,选用头座和尾座双主动的翻转变位机,使工件在转动时不传递力矩。翻转变位机的转盘和机器人的十字滑轨都由交流伺服电动机驱动,编码器反馈位置信息,可以任意编程定位。采用了带自锁的液压夹具。这种夹具不仅夹紧力大,而且在突然断电后,即使液压系统完全失压,工件无论处于何种位置也不会脱落。
3. 翻转变位机与弧焊机器人组合的工作站
图推土机台车架弧焊机器人工作站,采用两台翻转变位机形成两个工位。(P224)
推土机台车架弧焊机器人工作站,采用两台翻转变位机形成两个工位。为了使机器人能达到两个翻转变位机上工件的各个焊接位置,机器人安放在两个组成十字形的滑轨上,使之能沿工件长度方向和两个翻转变位机之间的方向移动。因工件又重又长,重心又偏向一侧,而且组装时只进行简单的定位焊,为了避免工件翻转时受力过大使定位焊点开裂,选用头座和尾座双主动的翻转变位机,使工件在转动时不传递力矩。翻转变位机的转盘和机器人的十字滑轨都由交流伺服电动机驱动,编码器反馈位置信息,可以任意编程定位。采用了带
自锁的液压夹具。这种夹具不仅夹紧力大,而且在突然断电后,即使液压系统完全失压,工件无论处于何种位置也不会脱落。
图推土机台车架弧焊机器人工作站
4. 龙门机架与弧焊机器人组合的工作站
龙门机架与弧焊机器人组合的工作站。采用这种倒挂焊接机器人的形式主要是为了增加机器人的活动空间,可根据需要配备1个轴(X)或2个轴(X+Y)或3个轴(X+Y+Z)的龙门机架,图示为使用一台三轴龙门机架的工作站。龙门机架配备的变位机可以是多种多样的,必须根据所焊工件的情况来决定。可以在龙门机架下放两台翻转变位机,或放一台翻转变位机和一台两轴变位机。后一种组合形式的一个主要优点是适应性比较好,长重型或短轻型等不同类型的工件都能焊接。
图龙门机架与弧焊机器人组合的工作站(P225)
5. 弧焊机器人与搬运机器人组合的工作站
弧焊机器人与搬运机器人组合的工作站是采用搬运机器人充当变位机的一种形式,但机器人之间不作协调运动。搬运机器人使工件处于合适位置后,由弧焊机器人进行焊接。焊完一条焊缝后,搬运机器人再对工件进行变位,弧焊机器人再焊接另一条焊缝。这种工作站只有工件的夹具需要根据工件结构专门设计,组合起来很方便,而且改型时只需更换夹具,不仅耗时少,成本也较低。
一种由两台6 kg弧焊机器人及一台120 kg搬运机器人组成的工作站。工件用气动夹具装夹在托盘上。共有两个托盘,一个由搬运机器人抓起递给两台弧焊机器人同时焊接,而另一个托盘放在托盘支架上由操作者进行装卸工件。随着机器人售价的降低,这种组合的弧焊机器人工作站的应用日益增多。
图弧焊机器人与搬运机器人组合的工作站(P226)
目录 1.设计方案确定…………………………………………………………………………………… 1.1设计要求、技术要求………………………………………………………………………. 1.2回转机构的确定……………………………………………………………………………. 1.3倾斜机构的确定……………………………………………………………………………. 1.4机构预期寿命估算…………………………………………………………………………. 2.回转机构设计…………………………………………………………………………………… 2.1回转轴强度计算……………………………………………………………………………. 2.2根据回转轴直径及受力情况选择轴承……………………………………………………. 2.3设计回转轴结构尺寸、选择键……………………………………………………………. 2.4回转机构驱动功率计算及电机选择………………………………………………………. 2.5设计回转轴减速机构………………………………………………………………………. 2.6回转主轴受力分析及校核,轴承校核……………………………………………………. 3.倾斜机构设计. ………………………………………………………………………………… 3.1方案确定… ……………………………………………………………………………… 3.2最大倾斜力矩计算… …………………………………………………………………… 3.3V带传动…… ……………………………………………………………………………… 3.4涡轮蜗杆传动……………………………………………………………………………… 3.5扇形齿轮机构……………………………………………………………………………… 3.6倾斜轴及轴承设计………………………………………………………………………… 4.总结… ………………………………………………………………………………………......参考文献
中央和省支农、惠农政策解读(一) 主讲老师瑞芬 一、政策出台的背景意义 2015年,农业农村工作要全面贯彻落实党的十八大和十八届三中、四中全会精神,深入贯彻总书记系列重要讲话精神,主动适应经济发展新常态,按照稳粮增收、提质增效、创新驱动的总要求,充分挖掘农业部增收潜力,开发农村二、三产业增收空间,拓宽农村外部增收渠道,加大政策助农增收力度,努力在经济发展新常态下保持城乡居民收入差距持续缩小的势头。 2015年出台了50项支农惠农政策。 二、政策涉及的主要容及亮点 (一)政策宗旨:提高农业补贴政策效能。 (二)主要思路:健全国家对农业的支持保护体系。保持农业补贴政策连续性和稳定性,逐步扩大“绿箱”支持政策实施规模和围,调整改进“黄箱”支持政策,充分发挥政策惠农增收效应。 【说明】 “绿箱”政策,是指由政府提供的、其费用不转嫁给消费者,且对生产者不具有价格支持作用的政府服务计划。如研究、病虫害防治、培训、推广与咨询服务。 “黄箱”政策,是指政府对农产品的直接价格干预和补贴。如价格支持;种植面积补贴;牲畜数量补贴等。 (三)主要容及亮点: 一是继续实施种粮农民直接补贴、良种补贴、农机具购置补贴、农资综合补贴等政策。选择部分地方开展改革试点,提高补贴的导向性和效能。 二是完善农机具购置补贴政策,向主产区和新型农业经营主体倾斜,扩大节水灌溉设备购置补贴围。 三是实施农业生产重大技术措施推广补助政策。 四是实施粮油生产大县、粮食作物种植大县、生猪调出大县、牛羊养殖大县财政奖励补助政策。
五是扩大现代农业示区奖补围。 六是健全粮食主产区利益补偿、耕地保护补偿、生态补偿制度。 三、主要政策解读 (一)粮食直补政策 2015年中央财政继续实行种粮农民直接补贴,2014年1月份,中央财政已向各省(区、市)预拨2015年种粮直补资金151亿元。 1.补贴对象 直接补贴给从事粮食生产的农民(包括主产粮食的国有农场的种粮职工)。 【提示】 坚持谁种地补给谁的原则,承包地转包他人的,按承包协议处理;抛荒地和非农地征用的耕地不予补贴。 具体实施围由省级人民政府根据当地实际情况自行决定。 2.补贴方式 粮食主产省、自治区(指、、、、、、、、、、、、,下同)原则上按种粮农户的实际种植面积补贴;其他省、自治区、直辖市要结合当地实际选择切实可行的补贴方式。 具体补贴方式由省级人民政府根据当地实际情况确定。 3.兑付方式 可以采取直接发放现金的方式,也可以逐步实行“一卡通”或“一折通”的方式,向农户发放储蓄存折或储蓄卡。 当年的粮食直补资金尽可能在播种后3个月一次性全部兑现到农户,最迟要在9月底之前基本兑付完毕。 具体兑付方式由省级人民政府根据当地实际情况确定。 (二)良种补贴政策 2015年中央财政继续实行农作物良种补贴,目的是支持农民积极使用优良作物种子,提高良种覆盖率。 1.补贴对象 对生产中使用农作物良种的农民(含农场职工)给予补贴。 2.补贴围
( 操作规程 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 焊接变位机安全操作维护规程 (新版) Safety operating procedures refer to documents describing all aspects of work steps and operating procedures that comply with production safety laws and regulations.
焊接变位机安全操作维护规程(新版) 1目的 为安全正确地操作使用、维护保养好焊接变位机。 2范围 适应于焊接变位机的安全操作和维护保养。 3职责 设备管理部门负责监督本规程的实施。 设备使用者负责设备安全正确使用和维护保养。 4内容和要求 4.1操作者应熟悉设备的性能、结构和传动原理;并严格按照设备说明书规定程序操作设备;按要求穿戴劳保用品。 4.2本机具有两个全回转自由度,可绕两个相互垂直的轴回转360度,被焊工作的任一条焊缝都可转到平焊或船焊位置;
4.3大回转控制有正转发反转两个按钮,按下正转按钮,L臂正转,按下反转按钮,L臂反转,相应指示灯亮;对于小回转控制,按下正、反 转按钮,可控制来件具与工作正反转,同时相应指示灯亮,大小回转的正反转均为点动,按位按钮运转,松开即停; 4.4安装和拆卸工件时,检查圆压板是否已取出及顶杆是否退回到位,以防工件损坏夹具; 4.5吊装工件不得有大幅度的摆动,防止工件撞坏夹具; 4.6工件落在夹具上时,要轻放,不得对夹具及变位机有过大冲击; 4.7工件装卡必须按要求定位,全部夹具的螺母、螺栓、顶丝都要拧紧,压板压牢。装卡完成后需试转检查,确认装稳后再正式作业; 4.8工作前应检查工件回转可及范围内有无其它物品,避免发生碰撞; 4.9工件转至作业们置后,应将电源开关关闭,切断电源,防止
珠海固得焊接自动化设备有限公司陈裕川江维何奕波摘要:在现代焊接机器人工作站中,变位机是实现高效、优质焊接生产的重要组成珠海固得焊接自动化设备有限公司陈裕川江维何奕波 摘要:在现代焊接机器人工作站中,变位机是实现高效、优质焊接生产的重要组成部件。本文概述了机器人焊接变位机的种类和结构形式,列举了焊接变位机在机器人工作站中典型的应用实例,详细地论述了机器人焊接变位机的技术要求、设计准则和计算方法,介绍了标准型机器人变位机的主要技术特性参数。 关键词:机器人工作站;变位机;设计准则 1 前言 在现代工业生产中,机器人的应用越来越普遍。为充分发挥机器人的功效,其通常与各种焊接变位机组合使用,从而实现高效、优质的焊接生产。目前,焊接变位机已成为焊接机器人工作站不可缺少的组成部分。一台较复杂的多轴焊接变位机的价格往往超过标准机器人本身的价格,可见焊接变位机的重要性。因此,必须重视焊接变位机的设计与制造。迄今,我国尚未制定焊接变位机设计规程,本文根据相关的技术文献,概括地讨论了机器人焊接变位机的设计准则。 2 焊接变位机的种类 目前,与机器人配套使用的焊接变位机有多种结构形式。现将最常用的焊接变位机分述如下: 2.1 固定式回转平台。这是一种最简单的单轴变位机,其结构形式见图1。工作平台可采用电机或风动马达驱动。通常工作平台的回转速度是固定不变的,其功能是配合机器人按预编程序将工件旋转一定的角度。 2.2 头架变位机。头架变位机也是一种单轴变位机,其结构形式如图2所示, 卡盘通常由电机驱动。与回转平台不同,其旋转轴是水平的,适用于装卡短小型工件,可配合机器人将工件接缝转到适于焊接的位置。 2.3 头尾架变位机。头尾架变位机由头架和尾架组成,其结构形式见图3,是机器人工作站最常用的变位机。在一般情况下,头架装有驱动机构,带动卡盘绕水平轴旋转。尾架则是被动的。如工件长度较大或刚度较小,亦可将尾架装上驱动机构,并与头架同步起动。严格地说,头尾架变位机仍属于单轴变位机。尾架在机座轨道上的水平移动在装卡工件时起作用,不与机器人协调动作。
本次设计是以焊接变位机作为主要的研究对象。在焊接变位机中采用全液压系统,使之重量减轻,自动化程度增强,变位机中的传动部分是由一个油泵机组分别驱动油马达和三组油缸带动工作台进行回转和倾斜,并使主,副臂产生俯仰动作调节工作台的高低。本次设计对焊接变位机的传动机构的特点和组成都做了详细的介绍,对机构中的主要零部件做了具体的设计。本次设计采取了独特的设计,使得产品更为先进、实用,设计后制造出来的焊接变位机主要应用在焊接行业上,这样可以缩短焊接辅助时间,提高工人的劳动生产率,减轻工人劳动强度,改善焊接质量,并充分发挥各种焊接方法的效能。 在焊接生产中,经常会遇到焊接变位以及选择合适的焊接位置的情况,针对这一实际需要,我们设计的焊接变位机,它可通过工作台的回转和倾斜,使焊缝处于易焊位置。焊接变位机与焊接操作机配合使用,可实现焊接的机械化、自动化,提高了焊接的效率和焊接质量。焊接变位机可应用于化工、锅炉、压力容器、电机电器、铁路交通、冶金等工业部门的自动焊接系统。 关键词: 焊接变位机;液压系统;回转;倾斜;
The design is subject to weld change site equipment .The weld change site equipment,which the hydraulic system been used to lighten its weight and achieve highly automatically. The transmission part of the equipment is powered by one group of oil pump,several hydraulic motor and three hydrocylinder drive the work table to achieve rotation, incline and vice-arm to adjust work table height. The detailed system feature and components have been introduced in this design to emphasis the cutting edge and reality feature, which been enhanced by the specialty design of its major component. Weld change site equipment is mainly for welding industry to reduce the welds the assistance period, enhance work efficiency, reduce utility of labour and improve quality of welding. Most importantly, weld change site equipment could enhance the effect of almost every sort of welding。 In the welding production, it can meet the welding frequently to transition and to choose the appropriate welding position the situation, in view of this actual demand. This design the Weld change site Equipment. It has been possible through the work table rotation and incline. It causes the welded joint to be in easily to weld the position. The weld change site equipment and the welding operation machine coordination use, can realize the welding mechanization, the automation, enhanced the welding efficiency and the welding quality. Weld change site equipment can be applied in the industrial section of the chemical engineering, boiler, pressure container, electrical engineering electric appliances, rail communication, metallurgy to weld system automatically. Keywords: weld change site equipment;hydraulic system;rotation;incline
第九章带式输送机的基本知识 第一节带式输送机的分类及适用条件 一、带式输送机的分类及适用条件 带式输送机是以胶带作为牵引机构和泵载机构的一种摩擦传动连续动作式运输设备,在煤矿井下和地面生产系统中应用最为广泛。它具有运输能力大、工作阻力小、耗电量低、运输距离长、使用寿命长、噪音低、安全可靠,且对煤的破碎作用小等优点。 1. 分类 根据牵引方式不同,带式输送机可分为滚筒驱动(牵引)带式输送机和钢丝绳牵引带式输送机两类。其主要形式如下图: 绳架落地式 落地式 钢架落地式 固定式绳架吊挂式 吊挂式 通用带式钢架吊挂式 输送机绳架落地式 滚筒驱动落地式 带式输送机伸缩式钢架落地式 带式输送机吊挂式绳架吊挂式 转载式钢架吊挂式 钢丝绳牵引钢丝绳芯带式输送机 带式输送机 下面介绍几种煤矿常用的带式输送机。 (1)普通型胶带输送机 普通型胶带输送机是一种通用固定式输送机。其特点是机架固定在底板上或基础上,一般使用在运输距离不太长、一旦敷设即永久使用的地点,如矿井地面选煤厂及斜井、主运输巷等井下主要运输巷道内。普通型胶带输送机拆卸麻烦,不能满足采区运输的需要。 (2)绳架吊挂式胶带输送机 以悬吊在支架棚梁上的钢绳为机架的胶带输送机称为绳架吊挂式胶带输送机。它主要用于煤矿井下采区顺槽和集中运送巷作为运送煤炭的设备,在条件适宜的情况下,亦可使用于
采区上、下山运输。 (3)可伸缩胶带输送机 可伸缩胶带输送机能够比较灵活地迅速进行缩短或伸长,它的传动原理和普通胶带输送机一样,都是借助于胶带与滚筒之间的摩擦力来驱动胶带运行。 (4)强力胶带输送机 强力胶带输送机是指钢芯胶带输送机,它与普通胶带输送机不同之处是用钢丝绳芯胶带代替了普通胶带,从而使胶带强度提高了几十倍甚至近百倍。强力胶带输送机主要用于运输任务大、运输距离长、长距离无转载的工作地点。 (5)钢丝绳牵引输送机 钢丝绳牵引胶带输送机是一种特殊形式的强力胶带输送机,它以钢丝绳作为牵引机构,而胶带只起承载作用,不承受牵引力,使得牵引机构和承载机构分开,从而解决了运输距离长、运输量大、胶带强度不够、运输不平稳的矛盾。 2.适用条件 带式输送机适用于水平及较大倾角的采煤工作面。通常情况下,沿倾斜向上运输原煤时,倾角不能大于18°;向下运输时,倾角不大于15°。运送俯着性和黏结性大的物料时,倾角还可以大一些,大倾角上运带式输送机上运输煤炭时,倾角可达到25°。 二、带式输送机的结构 带式输送机的主要组成部分有机架、托辊、软启动装置、制动装置等。(如下图) 图 8-1 可伸缩带式输送机 1.卸载端 2.传动装置 3.固定滚筒 4.储带装置 5.活动小车及活动滚筒 6.拉紧装置 7.输送带 8.输送带收放装置 9.机尾牵引装置 10.机尾 1.机架 机架用于安装托辊。机架的类型有吊挂式和落地式两种。落地式又分为固定式和可拆移动式。固定式用于主要运输巷道或永久铺设的地点,可拆移动式用于工作面运输平巷。 2.托辊
ICS B91 DB50 地方标准 DB 50/ T×××—2014 田园管理机 machine for field management 点击此处添加与国际标准一致性程度的标识 (征求意见稿) (本稿完成日期:2014-07-01) XXXX-XX-XX发布XXXX-XX-XX实施
前言 本标准按照GB/T 1.1-2009给出的规则起草。 本标准由xx市农业委员会提出。 本标准由xx市农业机械标准化技术委员会归口。 本标准起草单位: xx市农业机械鉴定站、xxxx农业机械有限公司、xxxx农机股份有限公司。本标准主要起草人: 本标准为首次制定。
田园管理机 1 范围 本标准规定了田园管理机的型号编制规则、技术要求、试验方法、检验规则、标志、包装、运输和贮存等。 本标准适用于配套发动机标定功率不大于7.5kW,最高行驶速度不大于10km/h,具有旱地开沟、起垄、培土、施肥、覆膜、锄草等不少于两种功能的田间管理机械。 2 规范性引用文件 下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。 GB 10396 农林拖拉机和机械、草坪和园艺动力机械安全标志和危险图形总则 GB/T 5262-2008 农业机械试验条件测定方法的一般规定 GB/T 5667-2008 农业机械生产试验方法 GB/T 9480 农林拖拉机和机械、草坪和园艺动力机械使用说明书编写规则 JB/T 7864 旱田中耕追肥机试验方法 JB/T 10266-2013 微型耕耘机 3 型号编制规则 3.1 产品型号由字母和阿拉伯数字组成,表示产品的类别和主要特征。 3.2 产品型号由分类代号、发动机标定功率和特征代号组成,配套发动机功率、发动机特征代号、驱动类型、工作部件输出轴总数之间,以短横线隔开。 3.3 分类代号由产品大类代号和小类代号组成,大类代号:3 表示田间管理机械,小类代号:TG 表示田园管理机。 3.4 配套发动机功率,单位:kW,以标定功率表示,采用数字修约法,最多保留2位小数。 3.5 发动机特征代号:发动机特征代号用字母表示,FQ表示风冷汽油内燃机,FC表示风冷柴油内燃机,SC表示蒸发式水冷柴油内燃机;发动机起动方式为电起动的,在发动机特征代号后加E表示,起动方式为手拉(或手摇)起动的,不标注。 3.6 驱动类型:单轮驱动用D表示,双轮驱动用S表示,履带式用L表示。 3.7 工作部件输出轴总数:指工作部件输出轴(含驱动输出轴,不包含支撑装置轴),用阿拉伯数字表示。输出轴数为1时,不标注。 3.8 产品型号的编排顺序:
开题报告 题目:0.5T焊接变位机的设计
一、毕业设计(论文)综述 1.1 题目背景 在焊接生产中,经常会遇到焊接变位及选择合适焊接位置的情况,针对这些实际需要,我们设计和研制了焊接变位机,它可以通过工作台的回转和倾斜,使焊缝处于易焊位置。焊接变位机与焊接操作机配合使用,可以实现焊接的机械化,自动化,提高了焊接的质量和焊接效率。焊接变位机可以应用于化工,锅炉,压力容器,电机电器。铁路交通,冶金等工业部门的自动焊接系统[4]。 在现代加工和制造过程中,焊接变位机已悄然成为一种不可缺少的设备,其作用越来越突出。特别是近十年来,这一产品在我国工程机械行业有了大的发展,获得了广泛的应用。各种机械产品和机械设备的结构件大多数都很复杂,尤其是各种机械的主要关键部件,其焊接质量的好坏直接影响整机性能。而选择合适的变位机能提高焊接质量及生产效率,降低工人的劳动强度和生产成本,加强安全文明生产,有利于现场管理。特别是入世的冲击,机械市场竞争将会越来越激烈,国内企业必须适应形势通过焊接变位机等基础设备投入达到生产能力的革命。因此,近年来焊接变位机得到国内工程机械行业的广泛共识,对这方面的投入都在加大[5]。 1.2 研究意义 焊接变位机是一种焊接辅助设备,它与焊接操作机、焊接滚轮架并称为焊接辅助设备中三大机。焊接变位机是应焊接行业的机械化、自动化发展需要而产生的。焊接变位机作为一种焊接配套设备,用于管子横向对接焊接,管子与法兰内外环缝焊接,管子对管子全位置焊接。焊接变位机可水平翻转角度,通过工作台的回转及翻转运动使工件上焊缝处于最理想的位置进行焊接,从而大大提高焊缝质量,减轻焊工劳动强度,尤其是适合焊接各种轴类、盘类、筒体等回转工件的理想设备。 1.3 国内外相关研究情况 1.3.1 国内研究现状 现在我国生产焊接变位机的厂家已经不少,大都不成规模。以变为机为主导产品发展起来的企业,尚未形成。天津鼎盛公司工程机械有限公司、无锡市阳通机械设备有限公司、长沙海普公司、威达自动化设备有限公司等单位生产的变位机在国内占有较大市场。到2000年,国内已开发的变位机产品约70余种规格。以下简单介绍这些变位机的基本型式。以上基本型产品发展了17个系列,主要为普通型,用于手把焊。此外还有调速型、联控型和机器人配套型产品。 但是,在我国焊接变位机时一个年轻的产品,由于制造业之间发展水平的差异,很多企业的焊接工位,还没有装备焊接变位机;同时相关的研究也比较薄弱。在人们眼中仍然认为焊接变位机是一个无足轻重的产品。然而在国际上,包括各种功能的产品在内,有百余系列。在技术上有普通型的,有无隙传动私服控制型的;产品的额定
一、科技名词定义 中文名称: 皮带输送机 英文名称: belt conveyer,coal conveyer belt;belt conveyer;belt conveyor 其他名称: 皮带输煤机;皮带机;皮带运输机;皮带输送机 定义1: 由承载于一长列槽形托辊的橡胶带连续运煤的机械。 应用学科: 电力(一级学科);燃料(二级学科) 定义2: 由橡胶输送带、钢支架、辊筒、驱动装置和张紧装置组成的一种构造简单的连续运输设备。应用学科: 电力(一级学科);水工建筑(二级学科) 定义3: 用无极挠性输送带载运物料的输送机。 应用学科: 煤炭科技(一级学科);矿山机械工程(二级学科);矿山运输(三级学科) 定义4: 由驱动装置带动胶带或链板循环运转输送料物的机械。 应用学科: 水利科技(一级学科);水利工程施工(二级学科);施工机械(水利)(三级学科) 二、百科名片介绍:
带式输送机是一种摩擦驱动以连续方式运输物料的机械。主要由机架、输送皮带、皮带辊筒、张紧装置、传动装置等组成。它可以将物料在一定的输送线上,从最初的供料点到最终的卸料点间形成一种物料的输送流程。它既可以进行碎散物料的输送,也可以进行成件物品的输送。除进行纯粹的物料输送外,还可以与各工业企业生产流程中的工艺过程的要求相配合,形成有节奏的流水作业运输线。 带式输送机可以用于水平运输或倾斜运输,使用非常方便,广泛应用于现代化的各种工业企业中,如:矿山的井下巷道、矿井地面运输系统、露天采矿场及选矿厂中。 三、皮带输送机的工作原理: 带式输送机主要由两个端点滚筒及紧套其上的闭合输送带组成。带动输送带转动的滚筒称为驱动滚筒(传动滚筒);另一个仅在于改变输送带运动方向的滚筒称为改向滚筒。驱动滚筒由电动机通过减速器驱动,输送带依靠驱动滚筒与输送带之间的摩擦力拖动。驱动滚筒一般都装在卸料端,以增大牵引力,有利于拖动。物料由喂料端喂入,落在转动的输送带上,依靠输送带摩擦带动运送袋卸料端卸出。 四、皮带输送机的种类: 1、转弯皮带机 2、爬坡皮带机 3、直行皮带机 4、特殊皮带机(45度皮带机、扇型皮带机等) 5、轻型皮带机 6、窄式皮带机 7、伸缩皮带机 8、装卸皮带机 9、钢带输送机 五、皮带输送机的主要种类: 皮带输送机的撒料是一个共性的问题,原因也是多方面的。但重点还是要加强日常的维护与保养。 1. 转载点处的撒料转载点处撒料主要是在落料斗,导料槽等处。如皮带输送机严重过载,皮带输送机的导料槽挡料橡胶裙板损坏,导料槽处钢板设计时距皮带较远橡胶裙板比较长使物料冲出导料槽。上述情况可以在控制运送能力上,加强维护保养上得到解决。 2. 凹段皮带悬空时的撒料凹段皮带区间当凹段曲率半径较小时会使皮带产生悬空,此时皮带成槽情况发生变化,因为皮带已经离开了槽形托辊组,一般槽角变小,使部分物料撒出来。因此,在设计阶段应尽可能地采用较大的凹段曲率半径来避免此类情况的发生。如在移动式机械装船机、堆取料机设备上为了缩短尾车而将此处凹段设计成无圆弧过渡区间,当皮带宽度选用余度较小时就比较容易撒料。 3. 跑偏时的撒料皮带跑偏时的撒料是因为皮带在运行时两个边缘高度发生了变化,一边高,而另一边低,物料从低的一边撒出,处理的方法是调整皮带的跑偏。 六、输送机发展历史: 中国古代的高转筒车和提水的翻车,是现代斗式提升机和刮板输送机的雏形;17世纪中,开始应用架
ICS65.060.20 B 91 DB37 山东省地方标准 DB37/T 2630—2014 多功能田园管理机 通用技术条件 2014-12-15发布2015-01-15实施
前言 本标准按照GB/T 1.1—2009给出的规则起草。 请注意本文件的某些内容可能涉及专利。本文件的发布机构不承担识别这些专利的责任。 本标准由山东省农业机械科学研究院提出。 本标准由山东省农业机械标准化技术委员会归口。 本标准起草单位:山东华盛中天机械集团股份有限公司、日照市立盈机械制造有限公司、山东省泰安市农业机械科学研究所、山东省农业机械科学研究院。 本标准主要起草人:郭丽、黄进光、张作坤、栗慧卿、吴修文、王永建。
多功能田园管理机 通用技术条件 1 范围 本标准规定了多功能田园管理机的术语和定义、型号与基本参数、安全要求、技术要求、试验方法、检验规则、标志、包装、运输与贮存。 本标准适用于以汽(柴)油机为动力、配套发动机额定功率不大于7.5 kW,行驶速度不大于10 km/h,主要用于旋耕、起垄扶沟、开沟、培土、锄草、施肥、播种及水田的整平等农田作业的多功能田园管理机(以下简称田园管理机)。 2 规范性引用文件 下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅所注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。 GB/T 191 包装储运图示标志 GB/T 2828.1 计数抽样检验程序 第1部分:按接收质量限(AQL)检索的逐批抽样计划 GB/T 6388 运输包装收发货标志 GB/T 9478-2005 谷物条播机 试验方法 GB/T 9480 农林拖拉机和机械、草坪和园艺动力机械 使用说明书编制规则 GB 10395.10 农林拖拉机和机械 安全技术要求 第10部分:手扶(微型)耕耘机 GB 10396 农林拖拉机和机械、草坪和园艺动力机械 安全标志和危险图形 总则 GB/T 13306 标牌 JB/T 5673 农林拖拉机及机具涂漆通用技术条件 JB/T 8574 农机具产品 型号编制规则 JB/T 9832.2-1999 农林拖拉机及机具漆膜附着性能测定方法 压切法 JB/T 10266-2013 微型耕耘机 NY 2189-2012 微耕机 安全技术要求 3 术语和定义 下列术语和定义适用于本文件。 3.1 多功能田园管理机 以汽(柴)油机为动力,配套发动机额定功率不大于7.5 kW,行驶速度不大于10 km/h,单轮、双轮或履带驱动,主要配套旋耕机、开沟器、培土器、起垄器、耘锄铲、施肥器、播种机、水田轮等机具的小型田园管理机械。 4 型号与基本参数
内部编号:AN-QP-HT420 版本/ 修改状态:01 / 00 The Procedures Or Steps Formulated T o Ensure The Safe And Effective Operation Of Daily Production, Which Must Be Followed By Relevant Personnel When Operating Equipment Or Handling Business, Are Usually Systematic Documents, Which Are The Operation Specifications Of Operators. 编辑:__________________ 审核:__________________ 单位:__________________ 焊接变位机安全操作维护规程通用范 本
焊接变位机安全操作维护规程通用范本 使用指引:本操作规程文件可用于保证本部门的日常生产、工作能够安全、稳定、有效运转而制定的,相关人员在操作设备或办理业务时必须遵循的程序或步骤,通常为系统性的文件,是操作人员的操作规范。资料下载后可以进行自定义修改,可按照所需进行删减和使用。 1目的 为安全正确地操作使用、维护保养好焊接变位机。 2范围 适应于焊接变位机的安全操作和维护保养。 3职责 设备管理部门负责监督本规程的实施。 设备使用者负责设备安全正确使用和维护保养。 4内容和要求 4.1操作者应熟悉设备的性能、结构和传动
原理;并严格按照设备说明书规定程序操作设备;按要求穿戴劳保用品。 4.2本机具有两个全回转自由度,可绕两个相互垂直的轴回转360度,被焊工作的任一条焊缝都可转到平焊或船焊位置; 4.3大回转控制有正转发反转两个按钮,按下正转按钮,L臂正转,按下反转按钮,L臂反转,相应指示灯亮;对于小回转控制,按下正、反 转按钮,可控制来件具与工作正反转,同时相应指示灯亮,大小回转的正反转均为点动,按位按钮运转,松开即停; 4.4安装和拆卸工件时,检查圆压板是否已取出及顶杆是否退回到位,以防工件损坏夹具; 4.5吊装工件不得有大幅度的摆动,防止工
编号:SM-ZD-24801 焊接变位机安全操作维护 规程 Through the process agreement to achieve a unified action policy for different people, so as to coordinate action, reduce blindness, and make the work orderly. 编制:____________________ 审核:____________________ 批准:____________________ 本文档下载后可任意修改
焊接变位机安全操作维护规程 简介:该规程资料适用于公司或组织通过合理化地制定计划,达成上下级或不同的人员 之间形成统一的行动方针,明确执行目标,工作内容,执行方式,执行进度,从而使整 体计划目标统一,行动协调,过程有条不紊。文档可直接下载或修改,使用时请详细阅 读内容。 1目的 为安全正确地操作使用、维护保养好焊接变位机。 2范围 适应于焊接变位机的安全操作和维护保养。 3职责 设备管理部门负责监督本规程的实施。 设备使用者负责设备安全正确使用和维护保养。 4内容和要求 4.1操作者应熟悉设备的性能、结构和传动原理;并严格按照设备说明书规定程序操作设备;按要求穿戴劳保用品。 4.2本机具有两个全回转自由度,可绕两个相互垂直的轴回转360度,被焊工作的任一条焊缝都可转到平焊或船焊位置; 4.3大回转控制有正转发反转两个按钮,按下正转按钮,
L臂正转,按下反转按钮,L臂反转,相应指示灯亮;对于小回转控制,按下正、反 转按钮,可控制来件具与工作正反转,同时相应指示灯亮,大小回转的正反转均为点动,按位按钮运转,松开即停; 4.4安装和拆卸工件时,检查圆压板是否已取出及顶杆是否退回到位,以防工件损坏夹具; 4.5吊装工件不得有大幅度的摆动,防止工件撞坏夹具; 4.6工件落在夹具上时,要轻放,不得对夹具及变位机有过大冲击; 4.7工件装卡必须按要求定位,全部夹具的螺母、螺栓、顶丝都要拧紧,压板压牢。装卡完成后需试转检查,确认装稳后再正式作业; 4.8工作前应检查工件回转可及范围内有无其它物品,避免发生碰撞; 4.9工件转至作业们置后,应将电源开关关闭,切断电源,防止误动作; 4.10工件总重及其重心偏心矩不得超过额定参数(见铭牌)。
现代机器人焊接变位机的设计准则 摘要:在现代焊接机器人工作站中,变位机是实现高效、优质焊接生产的重要组成部件。本文概述了机器人焊接变位机的种类和结构形式,列举了焊接变位机在机器人工作站中典型的应用实例,详细地论述了机器人焊接变位机的技术要求、设计准则和计算方法,介绍了标准型机器人变位机的主要技术特性参数。 关键词:焊接变位机;变位机;机器人焊接变位机;设计准则 1 前言 在现代工业生产中,机器人的应用越来越普遍。为充分发挥机器人的功效,其通常与各种焊接变位机组合使用,从而实现高效、优质的焊接生产。目前,焊接变位机已成为焊接机器人工作站不可缺少的组成部分。一台较复杂的多轴焊接变位机的价格往往超过标准机器人本身的价格,可见焊接变位机的重要性。因此,必须重视焊接变位机的设计与制造。迄今,我国尚未制定焊接变位机设计规程,本文根据相关的技术文献,概括地讨论了机器人焊接变位机的设计准则。 2 焊接变位机的种类 目前,与机器人配套使用的焊接变位机有多种结构形式。现将最常用的焊接变位机分述如下:
2.1 固定式回转平台。这是一种最简单的单轴变位机,其结构形式见图1。工作平台可采用电机或风动马达驱动。通常工作平台的回转速度是固定不变的,其功能是配合机器人按预编程序将工件旋转一定的角度。 2.2 头架变位机。头架变位机也是一种单轴变位机,其结构形式如图2所示, 卡盘通常由电机驱动。与回转平台不同,其旋转轴是水平的,适用于装卡短小型工件,可配合机器人将工件接缝转到适于焊接的位置。 2.3 头尾架变位机。头尾架变位机由头架和尾架组成,其结构形式见图3,是机器人工作站最常用的变位机。在一般情况下,头架装有驱动机构,带动卡盘绕水平轴旋转。尾架则是被动的。如工件长度较大或刚度较小,亦可将尾架装上驱动机构,并与头架同步起动。严格地说,头尾架变位机仍属于单轴变位机。尾架在机座轨道上的水平移动在装卡工件时起作用,不与机器人协调动作。
60吨焊接变位机设计(不含全套CAD图纸)
编号 无锡太湖学院 毕业设计(论文)题目:60吨焊接变位机设计信机系机械工程及自动化专业 学号: 学生姓名: 指导教师: 2013年5月25日
无锡太湖学院本科毕业设计(论文) 诚信承诺书 本人郑重声明:所呈交的毕业设计(论文)60吨焊接变位机设计是本人在导师的指导下独立进行研究所取得的成果,其内容除了在毕业设计(论文)中特别加以标注引用,表示致谢的内容外,本毕业设计(论文)不包含任何其他个人、集体已发表或撰写的成果作品。 班级:机械95 学号:0923237 作者姓名: 2013 年5 月25 日
无锡太湖学院 信机系机械工程及自动化专业 毕业设计论文任务书一、题目及专题: 1、题目60吨焊接变位机设计 2、专题 二、课题来源及选题依据 本课题来自无锡华联精工机械有限公司的生产实际。目前机械行业,特别是锅炉行业有大量的管和板的焊接,管子和板的接合处为环缝焊接,为适应自动焊接,管与板要自转,同时要倾斜45度,满足船形焊接,要求设计该焊接变位机。 我国引进的焊机器人柔性加工单元中的变位机,也是针对特定产品研制的,因此价格较昂贵,而技术培训及售后服务却不理想。在技术方面,我国许多工厂引进的弧焊机器人系统己具有机器人与变位机协调运动的功能。这对一些空间曲线或较复杂的焊缝可以始终保持在最佳位置下进行焊接,以提高焊接质量,并能一次起弧就焊完整条焊缝,以提高效率。但是有关技术却往往为外方厂家所垄断,我们并不掌握。从提高我国焊接生产机械化与自动化水平的角度出发,必须加大科研投入,研制高性能的焊接机器人与配套变位设备,力求在自动化焊接领域在国际上占有一席之地。
输送机检验及评判标准 通用带式输送机检验项目及判定标准 (检验依据标准:GB/T 10595-2009 带式输送机 GB 14784-1993 带式输送机安全规范JB/T 7330-2008 电动滚筒) 缺陷分类序 号 检验项目名称 判定标准 (对应技术要求条款) 检验方法 (对应试验方法条款) 备注 A 1 滚筒焊缝质量 GB/T 10595 4.4.4、 4.4.5 GB/T 10595附录A 2 带式输送机托辊 辊子 按本细则中表15-2 按本细则中表15-2 3 拉紧装置 GB/T 10595 4.2.4 GB 14784 4.2 现场检查 4 机电保护装置GB/T 1059 5 4.2.7 现场检查 5 安全保护装置GB/T 10595 4.10 现场检查 核查合格证等资料 6 减速器GB/T 10595 4.3.11 核查检验报告和合格证 等资料 7 制动装置 GB/T 10595 4.3.8、 4.3.9、 4.3.3 GB 14784 4.3.2 现场检查并核查检验报 告和合格证等资料 8 输送带对中运行GB/T 10595 4.2.2 输送机停车后,测量输送 带中心线与输送机中心 线偏差 0.25mm钢丝、 直尺 9 输送机空载噪声GB/T 10595 4.2.3 GB/T 10595 5.10 10 运行带速GB/T 10595 4.2.9 带速测速器、秒表 11 电动滚筒JB/T 7330 核查型式试验认可证书 和合格证等资料 B 12 滚筒最小壁厚GB/T 10595 4.4.1 金属测厚仪 13 滚筒静平衡试验GB/T 10595 4.4.10 GB/T 10595 5.7 14 滚筒外圆径向圆 跳动 GB/T 10595 4.4.12 GB/T 10595 5.6 15 胶面滚筒物理机 械性能 GB/T 10595 4.4.9 核查胶面物理机械性能 报告
编订:__________________ 单位:__________________ 时间:__________________ 焊接变位机安全操作维护 规程(正式) Standardize The Management Mechanism To Make The Personnel In The Organization Operate According To The Established Standards And Reach The Expected Level. Word格式 / 完整 / 可编辑
文件编号:KG-AO-3894-11 焊接变位机安全操作维护规程(正 式) 使用备注:本文档可用在日常工作场景,通过对管理机制、管理原则、管理方法以及管理机构进行设置固定的规范,从而使得组织内人员按照既定标准、规范的要求进行操作,使日常工作或活动达到预期的水平。下载后就可自由编辑。 1目的 为安全正确地操作使用、维护保养好焊接变位机。 2范围 适应于焊接变位机的安全操作和维护保养。 3职责 设备管理部门负责监督本规程的实施。 设备使用者负责设备安全正确使用和维护保养。 4内容和要求 4.1操作者应熟悉设备的性能、结构和传动原理;并严格按照设备说明书规定程序操作设备;按要求穿戴劳保用品。 4.2本机具有两个全回转自由度,可绕两个相互垂直的轴回转360度,被焊工作的任一条焊缝都可转
到平焊或船焊位置; 4.3大回转控制有正转发反转两个按钮,按下正转按钮,L臂正转,按下反转按钮,L臂反转,相应指示灯亮;对于小回转控制,按下正、反 转按钮,可控制来件具与工作正反转,同时相应指示灯亮,大小回转的正反转均为点动,按位按钮运转,松开即停; 4.4安装和拆卸工件时,检查圆压板是否已取出及顶杆是否退回到位,以防工件损坏夹具; 4.5吊装工件不得有大幅度的摆动,防止工件撞坏夹具; 4.6工件落在夹具上时,要轻放,不得对夹具及变位机有过大冲击; 4.7工件装卡必须按要求定位,全部夹具的螺母、螺栓、顶丝都要拧紧,压板压牢。装卡完成后需试转检查,确认装稳后再正式作业; 4.8工作前应检查工件回转可及范围内有无其它物品,避免发生碰撞;
皮带输送机的种类和运用原理 皮带输送机结构形式多样,爬坡皮带机、侧倾皮带机、有槽型皮带机、平型皮带机、转弯皮带机等多种形式。 皮带输送机也叫带式输送机或胶带输送机,是组成有序的流水线作业所不可短少的经济型物流输送设备。 皮带输送机具有输送能力强,输送间隔远,构造简单易于维护,能便当地实行程序化控制和自动化操作。运用输送带的连续或间歇运动来输送100KG以下的物品或粉状、颗状物品,其运转高速、平稳,噪音低,并能够上下坡传送。 皮带输送机普遍应用于家电、烟草、印刷、电子、电器、注塑、邮电、机械、食品等各行各业,物件的组装、检测、调试、包装及运输等。皮带机按其输送性能可分为重型皮带机如矿用皮带输送机,轻型皮带机如用在电子塑料,食品轻工,化工医药等行业。 线体输送可依据工艺要求选用:普通连续运转、节拍运转、变速运转等多种控制方方法;线体根据情况选用:直线、弯道、斜坡等线体方式。 TD75、DTⅡ型皮带输送机由于输送量大,构造简单,维护便当,本钱低,通用性强等优点,而被普遍地应用在矿山、煤炭、港口、冶金、交通、水电、化工等部门,进行装车、装船、转载或堆积各种常温状态的松懈密度为500~2500kg/m3各种散状物料或成件物品.由单机或多机组合成运输系统来输送物料,依据工艺请求可布置成水平和倾斜的方式。 DTⅡ型皮带输送机除了可满足程度或倾斜输送请求外,还可采用带凸弧段、凹弧段与直线段组合的输送方式.输送机允许输送的物料块度取决于带宽、带速、槽角和倾角,也取决于大块物料呈现的频率.该输送机适用的工作环境温度普通为-25~+40℃.我公司还生产轻型皮带输送线和移动式输送机。 苏州嘉俊包装是包装设备的专业厂家。主营:真空包装机,封切机,收缩包装机,装箱机,封箱机,开箱机等设备,结合十多年的专业制造与开发经验,秉执服务大众,维护信誉之经营理念,精心设计开发高性能光能包装生产流水线,根据不同层次客户为其选用高效率、自动化或经济实用型检测包装机械,在设备制造与销售中,质量和优秀的售后服务普遍得到用户的认可与信赖,产品遍布全国各地。