图像处理知识点复习
- 格式:doc
- 大小:243.50 KB
- 文档页数:12
高一ps图像处理知识点图像处理是指对图像进行处理和编辑,改变图像的亮度、对比度、色彩等,使得图像更加美观或者达到特定的目的。
Photoshop (简称PS)是一款功能强大的图像处理软件,广泛应用于平面设计、摄影后期处理、广告制作等领域。
高一学生在学习图像处理时,应了解以下几个知识点:1. 图像的基本概念图像是由一个个像素点组成的,每个像素点都有自己的颜色值。
常见的图像格式有位图(Bitmap)和矢量图(Vector),其中位图是使用像素点组成的,而矢量图是使用数学公式描述的,因此可以无损放大。
2. 色彩模式色彩模式决定了图像中能使用的颜色种类和数目,常见的色彩模式有RGB、CMYK和灰度模式。
RGB模式适用于显示器和网络上的图像,CMYK模式适用于印刷品,灰度模式则表示灰度图像,只有黑、白和各种灰色。
3. 基本工具的使用Photoshop提供了各种工具,常用的有选择工具(选区和移动图像)、画笔工具(绘制和填充图形)、橡皮擦工具(擦除图像)、修复工具(修复瑕疵和纠正图像)、文字工具(添加文字说明)等。
高一学生要熟悉这些工具的使用方法和功能。
4. 调整图像的亮度和对比度亮度决定了图像的明暗程度,可以通过调整图像的曝光、亮度和对比度来改变图像的整体明亮度。
对比度决定了图像中不同区域之间的色彩差异,通过调整对比度可以增强图像的细节和立体感。
5. 调整图像的色彩图像的色彩可以通过调整色阶、色调/饱和度和色温来改变。
色阶是一种调整图像中黑白灰三个通道的方法,可以增加图像的对比度;色调/饱和度可以改变图像的整体色调和饱和度;色温则改变图像的冷暖色调。
6. 图像的修饰和特效Photoshop提供了各种修饰和特效的功能,如滤镜、调整图层样式、添加阴影和高光等。
这些功能可以让图像呈现出不同的效果和风格,同时也能为设计师带来更多的创作空间。
7. 图像的剪裁和组合剪裁可以将图像的一部分去除或者保留感兴趣的区域,可以通过选择工具和剪裁工具进行操作;组合则可以将多个图像合并在一起,可以通过图层、蒙版和混合模式等功能来实现。
图像处理基础知识总结在当今数字化的时代,图像处理已经成为了一项至关重要的技术。
从我们日常使用的手机拍照,到医疗诊断中的影像分析,再到电影特效的制作,图像处理无处不在。
那么,什么是图像处理?它又包含哪些基础知识呢?接下来,就让我们一起走进图像处理的世界。
一、图像的基本概念图像,简单来说,就是对客观世界的一种视觉表达。
它可以是一张照片、一幅绘画,或者是通过计算机生成的图形。
图像可以分为两类:位图和矢量图。
位图,也称为点阵图,是由一个个像素点组成的。
每个像素点都有自己的颜色和亮度信息。
位图的优点是能够表现出丰富的色彩和细节,但缺点是在放大时会出现锯齿和模糊的现象。
矢量图则是通过数学公式来描述图像的。
它由线条、曲线和几何形状组成。
矢量图的优点是无论放大或缩小多少倍,图像都能保持清晰和锐利,但它在表现复杂的色彩和细节方面相对较弱。
二、图像的颜色模式颜色是图像中非常重要的一个元素。
常见的颜色模式有RGB 模式、CMYK 模式和灰度模式等。
RGB 模式是我们在电子设备中最常见的颜色模式。
它通过红(Red)、绿(Green)、蓝(Blue)三种颜色的不同比例混合来产生各种颜色。
在 RGB 模式中,每种颜色的取值范围是 0 到 255,当三种颜色都为 0 时,得到黑色;当三种颜色都为 255 时,得到白色。
CMYK 模式主要用于印刷行业。
它由青(Cyan)、品红(Magenta)、黄(Yellow)和黑(Black)四种颜色组成。
通过这四种颜色的不同比例混合,可以印刷出各种颜色的图像。
灰度模式则只有黑白灰三种颜色,每个像素点用一个 8 位的数值来表示其亮度,0 表示黑色,255 表示白色,中间的数值表示不同程度的灰色。
三、图像的分辨率分辨率是衡量图像清晰度的一个重要指标。
它通常表示为每英寸的像素点数(PPI)。
分辨率越高,图像越清晰,细节越丰富,但同时文件也会越大。
例如,我们常见的 72PPI 适用于在屏幕上显示的图像,而 300PPI 及以上则适用于高质量的打印图像。
图像处理知识点总结图像处理是一门涉及到数字图像和计算机图像的处理与分析技术的学科,它在工程、科学、医学、艺术和其他领域中都有着广泛的应用。
图像处理技术在计算机视觉、模式识别、图像合成、图像压缩、图像分割、图像识别等领域起着至关重要的作用。
本文将从基础概念、图像获取、图像增强、图像压缩、图像分割、图像识别等方面对图像处理的相关知识点进行总结。
一、基础概念1.1 图像的定义图像是一种用于表示事物或场景的视觉信息,通常以数字形式存在,是由大量的像素点组成的。
每个像素点记录了图像中某个点的亮度和颜色信息。
1.2 图像的表示图像可以使用灰度图或彩色图来表示。
灰度图是由单一颜色通道来表示图像的,通常用于黑白图像或需要简化处理的图像。
而彩色图需要使用多个颜色通道来表示图像的色彩信息。
1.3 像素像素是图像的最小单元,每个像素点都有自己的坐标和像素值。
在灰度图中,像素值代表了该点的亮度,而在彩色图中,像素值则包含了红、绿、蓝三个通道的信息。
1.4 图像尺寸图像的尺寸是指图像的长和宽,通常用像素来表示。
图像的尺寸决定了图像的清晰度和细节。
1.5 图像的坐标系图像的坐标系通常以左上角为原点,x轴向右递增,y轴向下递增。
在一些图像处理库中,图像的坐标系以左下角为原点,x轴向右递增,y轴向上递增。
1.6 数字图像数字图像是指使用数字方式表示的图像,它可以使用0和1的二进制来表示黑白图像,或者使用多个颜色通道的数值来表示彩色图像。
数字图像可以在计算机上进行处理和存储。
二、图像获取2.1 图像采集图像的获取通常是通过摄像机、扫描仪、卫星遥感等设备进行采集。
在图像采集过程中,需要注意光照、环境等因素对图像质量的影响。
2.2 数字化数字化是将模拟信号转换成数字信号的过程,通常将模拟图像通过采样、量化和编码等步骤转换成数字图像。
2.3 图像格式图像格式是指存储图像数据的方式。
常见的图像格式有JPEG、PNG、BMP、GIF等。
不同的格式对图像数据的存储方式、压缩方式、颜色深度等均有不同。
图像处理期末复习资料在学习图像处理的课程中,期末考试是一个重要的考核方式。
为了取得好成绩,我们需要仔细准备,并且对于课程重点和难点要有深入了解。
以下是本文提供的图像处理期末复习资料,从基础概念到常用算法,让我们深入了解图像处理的核心知识。
1. 图像的基本概念图像是人类所理解的视觉信息在计算机系统中的表示,一般由像素组成。
分辨率是图像的重要属性之一,通常用像素的数量来衡量。
图像还有灰度、色彩、亮度、对比度等属性。
在图像处理中,我们需要对这些属性进行分析和操作。
2. 图像预处理技术在进行图像处理之前,通常需要进行图像预处理。
预处理技术包括图像滤波、直方图均衡化、边缘检测、图像分割等。
这些操作对于后续的图像处理具有重要作用。
3. 数字图像处理基础算法数字图像处理基础算法包括图像灰度变换、点处理、直方图处理、滤波等操作。
其中,图像灰度变换是将图像像素的灰度值进行变换的操作,点处理是基于每个像素进行的处理,而滤波是将一定范围内的像素进行运算,以得到特定的图像效果。
4. 常见图像处理算法常见图像处理算法包括边缘检测算法、图像分割算法、图像增强算法等。
其中,边缘检测算法是检测图像中的边缘并进行标记,图像分割算法是将图像分成若干个区域,图像增强算法则是对图像进行增强以提高图像质量。
5. 图像压缩算法图像压缩算法是指将图像数据压缩以减小其占用的空间。
其中,无损压缩算法是指压缩后的数据可以还原为原始数据,常见的有LZW压缩算法等。
而有损压缩算法则是指压缩后的数据不能完全还原为原始数据,常见的有JPEG压缩算法等。
总结图像处理是计算机视觉领域中的重要组成部分,对于人们的日常生活和各个行业都具有重要意义。
期末考试是检验我们掌握图像处理知识的一个重要方式,理解并掌握相关知识和技能对于提高我们的学术水平和实际应用能力都具有重要的作用。
希望本文提供的图像处理期末复习资料能够帮助大家更好地备战期末考试。
图像分析知识点总结一、图像处理基础知识1. 图像的表示和存储:图像可以表示为数字矩阵,每个元素表示像素的灰度值或者颜色值。
常见的图像格式有BMP、JPEG、PNG等。
2. 图像的预处理:图像预处理包括去噪、平滑、锐化、增强等操作,目的是对图像进行初步处理,为后续的分析和识别提供更好的条件。
3. 图像的分割:图像分割是将图像分割成若干个区域或者物体的过程,通常采用阈值分割、边缘检测、区域生长等方法。
4. 图像的特征提取:图像特征通常包括颜色、纹理、形状等,提取这些特征可以为后续的模式识别和分类提供依据。
二、图像分析模式识别1. 特征抽取与选择:特征抽取是指从原始图像中提取有意义的特征,选择是指从提取的特征中选取对分类和识别有用的特征。
2. 图像分类方法:图像分类方法包括传统的统计学习方法和深度学习方法,常用的有支持向量机、决策树、卷积神经网络等。
3. 监督学习与无监督学习:监督学习是指在已标注样本的基础上进行学习和分类,无监督学习是指在无标注样本的基础上进行聚类和分类。
三、图像分析应用案例1. 医学影像诊断:医学影像诊断是图像分析的重要应用领域,包括CT、MRI、X光等影像的分析和诊断。
2. 工业生产质检:在工业生产中,图像分析可以用于产品表面缺陷检测、尺寸测量和外观质检。
3. 智能交通监控:图像分析可以应用于交通监控系统中,进行车辆识别、交通流量统计和违章监测。
4. 安防监控系统:安防监控系统中,图像分析可以用于人脸识别、行为分析和异常检测。
四、图像分析的挑战与发展趋势1. 多模态和大数据:随着传感器和数据采集技术的发展,图像分析面临着多模态数据和大规模数据的处理挑战。
2. 深度学习与自动特征学习:深度学习技术的发展为图像分析提供了新的方法和思路,自动特征学习可以有效克服手工提取特征的困难。
3. 图像分析与自然语言处理的结合:图像分析和自然语言处理的结合将为图像理解和推理提供新的机会和挑战。
在实际应用中,图像分析是一项综合性技术,在各个领域都有着重要的应用价值。
总复习提纲题型:填空题、计算题、作图题。
一、图像学1. 图像数字化处理狭义的数字图像处理:是指将一幅图像变为另一幅经过修改(或改进)的图像。
数字图像分析:是指将一幅图像转化为一种非图像的表示。
一幅图像必须先转换为数字形式计算机才能处理。
2. 采样。
采样是把空间连续的图像转换为离散点的图像,即把空间坐标离散化,取出图像在每个离散点处的函数值(称为灰度值)。
3. 量化。
量化是将图像函数值离散化,即将灰度值用整数表示。
4. 灰度直方图(1)定义:灰度直方图表示数字图像中每一灰度级出现的频数。
对连续图像而言,灰度直方图表示每一灰度级在图像中出现的概率密度,记作Pr(r)。
(2)计算方法:以灰度级为横坐标,纵坐标为灰度级的频率,绘制频率同灰度级的关系图就是灰度直方图。
它是图像的一个重要特征,反映了图像灰度分布的情况。
频率的计算式为例题:第二章图像处理点运算第6页的题。
(3)直方图的性质①灰度直方图只能反映图像的灰度分布情况,而不能反映图像像素的位置,即丢失了像素的位置信息。
②一幅图像对应唯一的灰度直方图,反之不成立。
不同的图像可对应相同的直方图。
图1给出了一个不同的图像具有相同直方图的例子。
图1 不同的图像具有相同直方图③一幅图像分成多个区域,多个区域的直方图之和即为原图像的直方图。
5. 对比度增强在一些图像中,感兴趣的特征占整个灰度级相当窄的范围,点运算可以扩展兴趣特征的对比度,是指占据可以显示灰度级的更大范围。
g(i,j)=a+(b-a)/(d-c)*( f(i,j)-c)例题:[50,200]->[0,255]a=0,b=255,c=50,d=2006. 图像的代数运算与几何运算(1)代数运算是指两幅输入图像之间进行点对点的加、减、乘、除运算得到输出图像的过程。
如果记输入图像为A(x,y)和B(x,y),输出图像为C(x,y),则有如下四种形式:(2)几何运算几何运算可改变图像中各物体间的空间关系。
从零开始学习图像处理掌握算法与实践技巧图像处理是计算机科学领域一个重要的研究领域,涉及到对数字图像进行获取、处理、分析和解释等一系列操作,已经在各个领域中得到了广泛的应用。
无论是在图像传感器、图像处理器还是图像识别领域,掌握图像处理的基本算法与实践技巧是至关重要的。
本文将从零开始,介绍图像处理的基础知识,重点讲解算法与实践技巧,帮助读者建立起图像处理的知识体系,提高自己的图像处理能力。
一、图像处理基础知识1.1 数字图像的基本概念数字图像是由离散的像素点组成的二维阵列,每个像素点表示图像中的一个小区域。
了解数字图像的基本概念是进行图像处理的基础。
1.2 图像获取与表示图像可以通过传感器获取,然后经过采样和量化处理后,得到数字化的图像。
图像采样和量化的过程会影响图像质量,因此需要注意合理选择采样率和量化位数。
1.3 图像灰度变换通常情况下,图像的灰度是由0至255之间的整数表示的。
图像灰度变换可以通过伽马变换、直方图均衡化等方法来增强图像的对比度和亮度,使得图像更易于分析和处理。
二、图像处理算法2.1 图像滤波算法图像滤波是一种常用的图像处理算法,可以通过线性滤波、非线性滤波等方法进行。
常见的线性滤波算法有均值滤波、高斯滤波等;而非线性滤波算法有中值滤波、双边滤波等。
2.2 图像边缘检测算法图像边缘检测是指通过对图像进行一系列运算,来突出物体边缘的过程。
常见的边缘检测算法有Sobel算子、Canny算子等。
边缘检测可以有效地提取图像中的边缘信息,用于后续的图像分析和识别。
2.3 图像分割算法图像分割是将图像划分为若干个互不重叠的区域的过程。
常用的图像分割算法有基于阈值的分割、区域生长等。
图像分割可以帮助我们将图像中的目标物体提取出来,有助于对图像进行进一步的分析和识别。
三、图像处理实践技巧3.1 图像库的使用在进行图像处理实践时,可以利用各种图像处理库来简化开发过程,常见的图像处理库有OpenCV、PIL等。
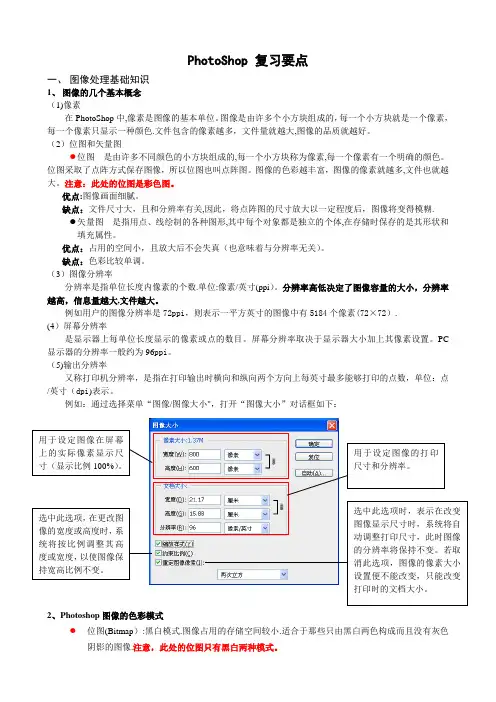
PhotoShop 复习要点一、 图像处理基础知识1、 图像的几个基本概念 (1)像素在PhotoShop 中,像素是图像的基本单位。
图像是由许多个小方块组成的,每一个小方块就是一个像素,每一个像素只显示一种颜色.文件包含的像素越多,文件量就越大,图像的品质就越好。
(2)位图和矢量图● 位图 是由许多不同颜色的小方块组成的,每一个小方块称为像素,每一个像素有一个明确的颜色。
位图采取了点阵方式保存图像,所以位图也叫点阵图。
图像的色彩越丰富,图像的像素就越多,文件也就越大。
注意:此处的位图是彩色图。
优点:图像画面细腻。
缺点:文件尺寸大,且和分辨率有关,因此,将点阵图的尺寸放大以一定程度后,图像将变得模糊. ● 矢量图 是指用点、线绘制的各种图形,其中每个对象都是独立的个体,在存储时保存的是其形状和填充属性。
优点:占用的空间小,且放大后不会失真(也意味着与分辨率无关)。
缺点:色彩比较单调。
(3)图像分辨率分辨率是指单位长度内像素的个数.单位:像素/英寸(ppi )。
分辨率高低决定了图像容量的大小,分辨率越高,信息量越大,文件越大。
例如用户的图像分辨率是72ppi ,则表示一平方英寸的图像中有5184个像素(72×72). (4)屏幕分辨率是显示器上每单位长度显示的像素或点的数目。
屏幕分辨率取决于显示器大小加上其像素设置。
PC 显示器的分辨率一般约为96ppi 。
(5)输出分辨率又称打印机分辨率,是指在打印输出时横向和纵向两个方向上每英寸最多能够打印的点数,单位:点/英寸(dpi )表示。
例如:通过选择菜单“图像/图像大小",打开“图像大小”对话框如下:2、Photoshop 图像的色彩模式● 位图(Bitmap ):黑白模式.图像占用的存储空间较小.适合于那些只由黑白两色构成而且没有灰色阴影的图像.注意,此处的位图只有黑白两种模式。
用于设定图像在屏幕上的实际像素显示尺寸(显示比例100%)。
图像处理技术:基础知识和实践方法一、图像处理基本概念1.1 图像的定义图像是指反映物体或场景在人眼或电视摄像机等光学器件上所形成的视觉信息的呈现方式。
图像可以是数字形式的,也可以是模拟形式的。
1.2 图像处理的定义图像处理是利用计算机和其他相关设备对图像进行数字化、处理、分析和显示的过程。
该过程通常包括图像的获取、预处理、特征提取和图像恢复等多个步骤。
1.3 图像处理的主要应用领域图像处理技术被广泛应用于很多领域,如医学图像分析、自动驾驶、智能安防、机器人视觉等。
当然,最广泛的是娱乐业,例如电影、游戏和虚拟现实等。
二、图像处理的基础知识2.1 数字图像的表示方法数字图像是一些离散的像素点组成的,每个像素点都有一个亮度值来表示其对应位置的颜色和灰度等信息。
这些像素点按照一定的方式排列起来,形成了一个二维的数字矩阵。
在计算机中,图像以数字的形式表示为一个二维矩阵,它的元素是像素的亮度值。
2.2 图像处理的基本过程图像处理通常可以分为四个基本过程:图像获取、图像预处理、特征提取和图像恢复等。
图像获取可以通过图像传感器或图像采集卡等设备来进行。
不同的图像采集设备有不同的工作原理和特点。
2.3 常见的图像处理算法图像处理算法是指对数字图片进行数字处理的过程,如图像增强、特征提取、图像分割和图像压缩等。
常见的图像处理算法包括:平滑滤波、图像锐化、边缘检测、二值化、形态学处理等算法。
2.4 图像处理的评价标准图像处理的效果可通过诸如清晰度、对比度、颜色等指标进行评价。
常用的评价标准包括峰值信噪比(PSNR)、结构相似性指标(SSIM)和标准偏差等指标。
三、图像处理的实践方法3.1 图像预处理图像预处理是图像处理的必要步骤,它可以更好地准备图像以进行后续处理。
图像预处理的目的是消除图像中的噪声、增强图像的对比度、均衡化和去除背景等。
3.2 图像增强图像增强的目的是改善图像的质量,加强对图像细节的观察和分析。
常见的图像增强技术包括:直方图均衡化、灰度变换、滤波等。
图像处理(图像学习)的基础必备知识基础储备知识列表(图像必备基础)1. 图像会表示成一个2D实数矩阵f(x,y),也称为是图像在那个像素的灰度或者是亮度,对于double类型的是0.0黑 1.0白,对于unit8类型是0黑,255是白2. 图像常见的数字形式编码:位图(栅格)和矢量3. 图像表示二值化图像,1比特图像(一个像素是1比特)0 1灰度图像,8比特图像(1个像素是8比特)0-255彩色图像24比特(RGB各占8比特),同时也会有第四通道,提供对每个像素透明性的测度索引图像24比特,其中每个像素给出的索引和索引所指示的彩色调色板中的元素R G B的值4. 基本术语图像拓扑:常用于二值图像并借助形态学领域:围绕一个给定像素的周围构成它的领域,4领域8领域邻接;通路;连接性;组元5. 图像处理分为3个层次底层:基本操作(噪声消除,对比度增强),其中输入和输出都是图像中层:从图像中提取属性(如边缘,轮廓,区域)高层:对一个场景的内容进行分析和解释6. 图像的处理分为:空间域和频域空间域:全局(点)操作面向领域的操作,卷积结合多幅图像的操作频域:7. 图像的采集需要光,光可用电磁波或者粒子秒速,一个光子是一个微小的电磁振动能量包,可以用波长和频率来刻画,波长乘以频率等于波传播的速度,人类的视觉系统(HVS)对波长在400-700nm,1nm=10-9m8. 彩色编码和表达彩色可使用3个数值分量和恰当的增加权函数来编码。
最简单的编码方式就是像素的RGB9. 人对光的感知以及对颜色的感知常用3个参数来描述:辉度:对于发光强度的主观感受色调:一个视感觉的属性,对应区域是否类似于一个感知的彩色,红绿蓝或者是组合饱和度:对一个区域用与其亮度成比例来判断的彩色行,对光源白色性的描述注:亮度可以用红绿蓝的加权和来计算10. 数字图像处理的硬件:采集装置,负责捕获数字化图像或视频序列camera link。
当相机产生模拟视频输出时,需要使用一个图像数字化器(图像采集卡)将其转化成数字格式;处理装置,计算机;显示和硬拷贝设备;存储设备,光盘。
医学图像处理知识点总结医学图像处理是一门研究如何获取、存储、传输、显示和分析医学影像的学科。
它主要应用于医学影像的获取和分析,包括X射线、CT、MRI、超声等图像。
医学图像处理的发展不仅对医学影像的质量有较大的提升,也对临床诊断和治疗产生了深远的影响。
以下是医学图像处理的一些主要知识点总结。
1. 医学图像获取医学图像的获取包括医学影像的图像采集与数据获取。
不同的医学影像设备,如X射线机、CT机、MRI机、超声机等,对应的图像获取方式、图像分辨率、图像类型等都可能存在差异。
在图像的获取过程中,需要注意保护患者隐私,并保证图像的质量和准确性。
2. 医学图像存储医学图像的存储是指将采集的医学影像数据进行数字化存储,并进行有效的管理和检索。
医学图像存储需要采用符合医学行业标准的数据格式,建立安全可靠的存储系统,确保影像数据的完整性和可访问性。
3. 医学图像传输医学图像传输指的是在医学影像数据之间进行网络传输,包括各种传输协议和网络安全等内容。
医学图像传输需要保证数据传输的稳定性和安全性,防止数据泄露和损坏。
4. 医学图像显示医学影像的显示对诊断和治疗非常重要。
医学影像显示系统需能够对各种类型的医学影像进行准确、清晰地显示,医生能够通过显示系统对影像进行观察和分析,并作出准确的诊断。
医学图像显示系统也需要支持多种功能,如3D重建、图像增强、图像测量等。
5. 医学图像分析医学图像分析是对医学影像进行量化和定量分析的过程。
医学图像分析技术包括图像分割、特征提取、分类和识别等,旨在提取影像中的信息并辅助医生做出诊断和治疗决策。
6. 医学图像处理算法医学图像处理算法是指针对医学影像数据开发的专用的算法。
常见的医学图像处理算法包括图像增强算法、图像分割算法、图像配准算法、图像重建算法等。
通过这些算法的应用,可以对医学图像进行精确地处理,并获得更准确的信息。
7. 医学图像质量评估医学影像质量评估是指对医学影像数据质量进行定量化和评估的过程。
图像处理知识点第⼀章绪论1. 图像(Image):没有严谨的定义,⼀般有2个层次在可见光段有光束的反射,经反射到视觉系统,在视觉系统中感受到的物或物群的影像。
具有⼀定物理意义的在空间按⼀定顺序排列的2D/3D的数据。
2. 图像的类别可见光成像和不可见光成像彩⾊与⾮彩⾊图像动态图像与静⽌图像模拟图像与数字图像3.数字图像处理系统概述数字图像处理系统由硬件和软件组成。
采集:获取数字图像的设备即采集装置。
显⽰存储主机:以微机或⼯作站为主,配以图像卡和外设构成微型图像处理系统通信:图像通信就是把图像传送到远⽅终端。
图像处理软件:由系统管理、图像数据管理和图像处理模块三部分组成。
4. 颜⾊模型—各种表⽰颜⾊的⽅法模型:⾯向机器(显⽰器、摄像机、打印机等)在三维直⾓坐标系中,⽤相互垂直的三个坐标轴代表R、G、B三个分量。
颜⾊空间:R、G、B限定在[0,1]的单位正⽅体HIS模型:⾯向颜⾊处理、⼈眼视觉利⽤颜⾊的三个属性:H(hue)-⾊调I(intensity)-亮度S(saturation)-饱和度组成表⽰颜⾊的圆柱体5. 数字图像I=f(x, y, z, λ, t)运动、彩⾊或多光谱的⽴体图像静⽌图像:I=f(x, y, z, λ)灰度图像:I=f(x, y, z, t)平⾯图像:I=f(x, y, λ, t)平⾯的静⽌灰度图像:I=f(x, y)第⼆章图像采集1. ⼈眼视觉感知特性●主观亮度:S 主观亮度,B 实际亮度●对⽐度(会计算)马赫带效应(Mach Band):不同灰度的条带,各条带内部亮度是常数。
但实际观察到带有强烈的边缘效应。
原因:⼈眼对于图像中不同空间频率具有不同的灵敏度,⽽在空间频率突变处出现了“⽋调”或“过调”。
2. 采样和量化的过程就是图像数字化的过程。
采样(sampling):空间坐标的离散化称为空间采样。
确定图像的空间分辨率。
采样间隔越⼤→图像像素数越少,空间分辨率越低,图像质量越差,严重时出现像素呈块状效应;采样间隔越⼩→所得图像像素数越多,空间分辨率⾼,图像质量越好,但数据量⼤。
图像化处理知识点总结1. 图像的基本概念图像是由像素组成的二维网格,每个像素包含一个或多个颜色通道的数值。
常见的颜色通道包括红色、绿色和蓝色,这些颜色通道的数值可以表示任意颜色。
图像的分辨率是指每个维度上的像素数,例如,一张可以为1024x768是以像素为单位来描述分辨率大小的图像。
图像可以是黑白的,也可以是彩色的。
在黑白图像中,每个像素只有一个数值来表示其亮度,而在彩色图像中,每个像素通常有三个数值来表示其红、绿、蓝各通道的亮度。
2. 图像的采集图像的采集是指使用摄像机或扫描仪等设备将现实世界中的图像转换为数字形式。
在数字摄像机中,光线通过镜头进入传感器,传感器将光线转换为电信号,并将其转换为数字形式的像素值。
扫描仪则是使用传感器来扫描纸质图像,并将其转换为数字形式的像素值。
图像采集的质量取决于设备的分辨率和像素深度。
3. 图像的增强图像增强是指通过算法和技术来改进图像的质量和清晰度。
常见的图像增强技术包括对比度增强,亮度调整,色调饱和度调整和锐化处理。
对比度增强可以使图像中的黑白颜色更加清晰,亮度调整可以调整图像的明暗程度,色调饱和度调整可以使图像中的颜色更加饱满,锐化处理可以使图像中的边缘更加清晰。
图像增强通常用于图像编辑软件和相机中。
4. 图像的滤波图像滤波是指通过应用滤波器来对图像进行模糊、平滑、降噪或边缘检测。
常见的图像滤波器包括均值滤波器、高斯滤波器、中值滤波器和Sobel滤波器。
均值滤波器可以使图像模糊,高斯滤波器可以平滑图像并降低噪音,中值滤波器可以去除图像中的噪点,Sobel 滤波器可以检测图像中的边缘。
图像滤波通常用于图像处理和计算机视觉任务中。
5. 图像的分割图像分割是指将图像分割成具有相似特征的区域的过程。
常见的图像分割技术包括阈值分割,区域生长,边缘检测和分水岭算法。
阈值分割可以根据像素的灰度值将图像分成不同的区域,区域生长可以将相邻的像素分成具有相似特征的区域,边缘检测可以检测图像中的边缘,分水岭算法可以将图像分割成具有不同高度的区域。
Photoshop操作题相关知识点知识点整理:知识点一:图像数字化1.图像数字化的概念图像数字化是将模拟图像信号转换为数字图像信号的过程。
图像数字化的基本思想:像素化和色彩化。
像素化即把一图像看成是由许许多多彩色或各种级别灰度的点组成的,这些点按纵横排列起来构成一幅画,这些点称为像素,像素越多,排列越紧密,图像越清晰。
色彩化是指每个像素的颜色都被数字化成一定的数值,在量化每个像素点的色彩值时,采用二进制位数为量化字长,一般可用8位、16位、24位或更高的量化字长来表示图像的颜色。
量化字长越长,则越能真实地反映原有的图像的颜色,但得到的数字图像的容量也越大。
2.图像存储量的计算影响位图图像存储容量的因素只有像素数、颜色数,跟图像中容的多少无关。
未经压缩的BMP图像存储容量的计算方法为:存储量(单位:字节B)=水平像素*垂直像素*每个像素色彩所需位数/8下面表格以分辨率800×600的位图图像为例,计算各种类别位图图像的存储空间。
知识点二、图层的基本操作一、图层的概念图层就像是含有文字或图形等元素的透明胶片,一按顺序叠放在一起,组合起来形成页面的最终效果。
2.图层具有两个主要特点:⑴图层的独立性:不同图层中的对象是相互独立的,即对某个图层进行操作,不会改变其他图层中的容;(注意:为了减小其他图层对某个正在编辑图层的影响,可以隐藏或锁定其他图层。
)⑵图层的叠加性:图层位置的上下关系决定了画面中图像的前后关系。
透过上面图层可以看见下面图层的容,同时,上面的图层也会遮挡住下面图层的容,当多个图层叠在一起时,文件窗口中显示的是所有图层信息的整体容展现。
通过移动各图层的相对位置或者添加更多的图层均可改变最终的形成效果。
提醒:在图像处理中,操作前首先应把操作的图层选中!!!二、图层的操作:(通过图层面板或图层菜单)1.选择图层单击相应图层缩略图2.显示/隐藏图层单击相应图层最前面的小方块3.创建新的图层单击“新建图层”按钮,4.图层名改名双击图层名,接着输入新的名称后按回车即可。
多媒体技术图像处理知识点梳理在当今数字化的时代,多媒体技术中的图像处理扮演着至关重要的角色。
从我们日常使用的手机拍照、修图软件,到专业的影视特效制作、医学影像诊断等领域,图像处理都有着广泛的应用。
接下来,让我们一起梳理一下图像处理中的重要知识点。
一、图像的基本概念图像可以被看作是对真实世界的一种数字化表示。
它由像素组成,每个像素都有特定的颜色和亮度值。
图像的类型主要包括位图和矢量图。
位图是由像素点构成的图像,常见的格式有 JPEG、PNG 等。
位图图像在放大时会出现锯齿状的边缘,因为像素点的数量是固定的。
矢量图则是通过数学公式来描述图像,常见的格式有 SVG 等。
矢量图无论放大或缩小,都能保持清晰的线条和形状。
图像的颜色模式也有多种,如 RGB(红、绿、蓝)模式,这是电子设备显示图像常用的模式;CMYK(青、品红、黄、黑)模式,主要用于印刷领域。
二、图像获取图像的获取方式多种多样。
常见的有使用数码相机、扫描仪等设备直接获取实物的图像;也可以通过软件生成图像,如使用图形设计软件创建图形。
在获取图像时,需要考虑图像的分辨率、色彩深度等参数。
分辨率决定了图像的清晰度,色彩深度则影响图像能够表现的颜色数量。
三、图像增强图像增强的目的是改善图像的质量,使其更便于观察和分析。
常见的方法包括灰度变换、直方图均衡化等。
灰度变换通过调整像素的灰度值来改变图像的对比度和亮度。
例如,线性灰度变换可以增强图像的整体对比度。
直方图均衡化则是通过重新分布图像的灰度值,使图像的灰度分布更加均匀,从而增强图像的对比度。
四、图像复原图像在获取、传输或处理过程中可能会出现失真。
图像复原就是试图恢复原始的、未失真的图像。
常见的图像复原方法有基于逆滤波的方法和维纳滤波方法。
逆滤波适用于对噪声较小的图像进行复原,而维纳滤波则在考虑噪声的情况下,能得到更准确的复原结果。
五、图像压缩随着图像数据量的不断增加,图像压缩变得尤为重要。
图像压缩可以减少存储空间和传输带宽的需求。
图像处理知识点总结一、图像采集1. 数字图像数字图像是由像素组成的二维矩阵,每个像素由灰度值或者颜色值来描述。
数字图像的采集通过光学图像传感器来实现,图像传感器可以将光信号转换成电信号,然后通过数模转换器转换成数字信号。
常见的图像传感器包括CCD和CMOS。
2. 分辨率图像的分辨率指的是图像中包含的像素数量,分辨率越高,图像越清晰。
分辨率可以用像素数来描述,常见的分辨率有1024×768、1920×1080等。
分辨率与图像的清晰度成正比,但是高分辨率也会增加图像文件的大小。
3. 颜色空间颜色空间是用来描述颜色的数学模型,常见的颜色空间包括RGB、CMYK、YUV等。
RGB颜色空间是由红、绿、蓝三原色构成,它是最常用的颜色空间。
CMYK颜色空间用于打印颜色,它是由青、品红、黄、黑四原色构成。
二、图像处理1. 空域处理空域处理是指在图像的像素级别上进行处理,包括图像增强、滤波、锐化等操作。
图像增强可以提高图像的对比度和亮度,滤波可以去除图像中的噪声,锐化可以增强图像的边缘和细节。
2. 频域处理频域处理是指在图像的频域上进行处理,包括傅里叶变换、频谱分析、频率滤波等操作。
傅里叶变换可以将图像从空域转换到频域,频谱分析可以分析图像中的频率成分,频率滤波可以去除图像中的某些频率成分。
3. 形态学处理形态学处理是指利用形态学运算对图像进行处理,包括膨胀、腐蚀、开运算、闭运算等操作。
膨胀可以增强图像中的物体,腐蚀可以减弱图像中的物体,开运算可以去除图像中的小孔洞,闭运算可以填充图像中的小孔洞。
三、图像分析1. 图像特征图像特征是用来描述图像的一些重要信息,包括颜色、纹理、形状等。
颜色特征可以用来区分不同物体,纹理特征可以用来区分不同材质,形状特征可以用来区分不同形状。
2. 物体检测物体检测是指在图像中检测出特定物体的位置和数量,常见的物体检测算法包括边缘检测、Hough变换、Haar特征检测等。
The Electromagnetic Spectrum在实际的图像处理应用中,最主要的图像来源于电磁辐射成像。
电磁波谱频率从高到低(波长从短到长)分别为伽马射线、X射线、紫外线、可见光、红外线、微波、无线电波。
可见光只是电磁波谱中一个很小的部分。
不同的电磁辐射波有各自的成像方式,其应用领域也不尽相同。
Non-Electro-Magnetic Imaging Modalities(modality[məuˈdæliti] 模式)非电磁成像模式Acoustic imaging [əˈku:stik iˈmædʒiŋ]声波成像A Simple Image Formation Model (简单的)图像形成模型静止的、单色的、平面的图像可定义为一个二维函数)(yx是空间坐f,其中,),,(yx标,而在坐标)x处的幅值f称为图像在该点处的强度或灰度。
(y,xyirfxxy,)((y,)(,)f可以看成由两个分量组成:x,(y)(1)照射分量)i:所见场景的入射光量,大于零且为有限值,由光源确定。
x(y,(2)反射分量)xr:场景中物体反射光量的能力,即反射率,在0(全吸收)和(y,1(全反射)之间,由场景中物体的特性确定。
We denote images by two-dimensional functions of the form )(y,xf is nonzerox,(yf. )and finite.The function )f may be characterized by two components:x(y,(1)illumination component ),xi: The amount of source illumination incident on the(yscene being viewed. The nature of )i is determined by the illumination source.x,(y(2)reflectance component )xr: the amount of illumination reflected by the objects in(y,the scene. )xr is determined by the characteristics of the imaged objects.(y,reflectance is bounded by 0 (absorption) and 1 (total reflectance)Image Sampling and Quantization数字图像的质量在很大程度上取决于采样和量化中所用的采样数和灰度级。
空间分辨率是图像中可辨别的最小细节,采样数是决定一幅图像空间分辨率的主要参数。
灰度分辨率是指在灰度级别中可分辨的最小变化,由量化的等级决定,灰度级通常是2的整数次幂。
The output of most sensors is a continuous voltage waveform. To create a digital image, we need to convert the continuous sensed data into digital form. This involves two processes: sampling and quantization.The quality of a digital image is determined to a large degree by the number of samples and discrete gray levels used in sampling and quantization.Spatial resolution is the smallest discernible [dɪˈsɜ:nəbəl]detail in an image.Gray-level resolution refers to the smallest discernible change in gray level.保持图像的灰度级不变(256),逐渐降低图像的空间分辨率(512×512至16×16,从(a)到(f)采样数减少)。
(注:为便于比较,所有的小图像都放大到了原图像的大小)图(b)与图(a)基本相似;图(c)中,帽檐处出现锯齿状,且头发有变粗的感觉;图(d)中,棋盘效应非常明显;图(e)已几乎不能分辨出人脸;图(f)单独观看完全不知其中为何物。
总结:空间分辨率高的图像包含的像素多,图像清晰;空间分辨率低的图像,图像质量差,严重时产生频率混叠,画面出现棋盘效应(checker board effect)。
对于同样的采样数,非均匀采样将比均匀采样能更好地表示原连续图像。
一般来说,在图像内灰度变化比较剧烈的区域(细节较多的区域),应该采用细采样;在图像内灰度变化比较平缓的区域(细节较少的区域),应该采用粗采样。
In this example, we keep the number of gray levels constant and reduce the number of samples.保持图像的空间分辨率不变(512×512),逐渐降低图像的灰度分辨率(从(a)到(f),灰度级数从256逐渐减小至2)。
图(b)与图(a)基本相似;从图(c)开始,可看到一些虚假轮廓,到后面越来越明显。
(这种效果是由于在图像的灰度平滑区使用的灰度级数不够造成的,通常称为伪轮廓。
)(由于人眼对于急剧的灰度级变化比较容易辨认,因此没有必要进行过细的分层;而对于那些灰度级变化比较平缓的部分,进行较细微的分层就十分必要了,否则,不仅无法辨认灰度的细微变化,还可能形成虚假的细节。
)总结:灰度分辨率高的图像可以拥有丰富的亮暗变化信息,图像层次丰富,图像质量好;灰度分辨率低的图像,图像层次欠丰富,图像质量差,会出现伪轮廓现象(false contouring)。
在充分考虑到人眼的识别能力之后,目前非特殊用途的图像均为8bit量化(256级灰度)。
In this example, we keep the number of samples constant and reduce the number of gray levels.Representing Digital Images左图为数字图像的坐标表示,数字图像的原点位于左上角,其中正x轴向下延伸,正y 轴向右延伸。
数字图像在原点的值就是)0,0(f,第一行下一个坐标处的值是)1,0(f,)1,0(表示第一行的第二个样本,它并不意味着是对图像采样时的物理坐标值。
右图为数字图像的矩阵表示,矩阵中的每一个元素具有一个特定的位置)x和幅值,(y),(y x f ,这些元素称为像素(pixel )。
The result of sampling and quantization is a matrix of real numbers. We will use twoprincipal ways to represent digital images.Each element of this matrix array is called a pixel.Graysacle Image灰度图像是指每个像素由一个量化的灰度级来描述的图像,它不包含彩色信息。
通常灰度值的范围在0到255之间,0表示黑、255表示白,其它值表示处于黑白之间的灰度。
图(a)是一幅灰度图像,从图中取出局部的一小块进行放大,得到图(b),对应于这个局部子块的数值矩阵如图(c)所示。
Binary Image二值图像是灰度图像的一个特例,它是指图像的每个像素只能是黑或白,没有中间的过渡,其像素值为0或1。
Color Image彩色图像是指每个像素由R 、G 、B 三基色构成,其中R 、G 、B 是由不同的灰度级来描述的,灰度级在0到255之间,0表示相应的基色在该像素中没有,255表示相应的基色在该像素中取得最大值。
Neighbors of a Pixel位于坐标),(j i 处的像素p 有4个水平和垂直的相邻像素,其坐标为:见ppt 这组像素称为p 的4邻域,用)(4p N 表示。
每个像素距),(j i 一个单位距离。
p 的4个对角相邻像素用)(p N D 表示,)(p N D 和)(4p N 合起来称为p 的8邻域,用)(8p N 表示。
如果p 位于图像的边界上,则p 的某些相邻像素位于图像的外部。
这个问题将在后续学习中讨论。
A pixel p at coordinates ),(j i has four horizontal and vertical neighbors whose coordinates are given by 见pptThis set of pixels, called the 4-neighbors of p , is denoted by )(4p N . Each pixel is a unit distance from ),(j i .The four diagonal neighbors of p have coordinates 见pptand are denoted by )(p N D . These points, together with the 4-neighbors, are called the 8-neighbors of p , denoted by )(8p N .Image Interpolation(1)对),(n m X 和)1,(+n m X 进行一次线性插值,得)1,(),()1(++-n m aX n m X a对),1(n m X +和)1,1(++n m X 进行一次线性插值,得)1,1(),1()1(++++-n m aX n m X a(2)最后进行一次线性插值,得)]1,1(),1()1[()]1,(),()1)[(1(++++-+++--n m aX n m X a b n m aX n m X a b最近邻插值(nearest neighbor interpolation ):明显的锯齿边缘和马赛克现象。
双线性插值(Bilinear interpolation ):其平滑作用使图像边缘和细节变得较为模糊,而且仍然会有一部分锯齿现象。
Scale (缩放变换)缩放变换:某一点),(y x 经过缩放变换后,其位置变为),(y x '',两者之间有如下关系⎩⎨⎧='='byy axx 以矩阵的形式表示为⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡''y x b ay x 00 a 、b 分别是x 方向和y 方向的缩放率。