前馈控制系统前馈控制系统的基本原理
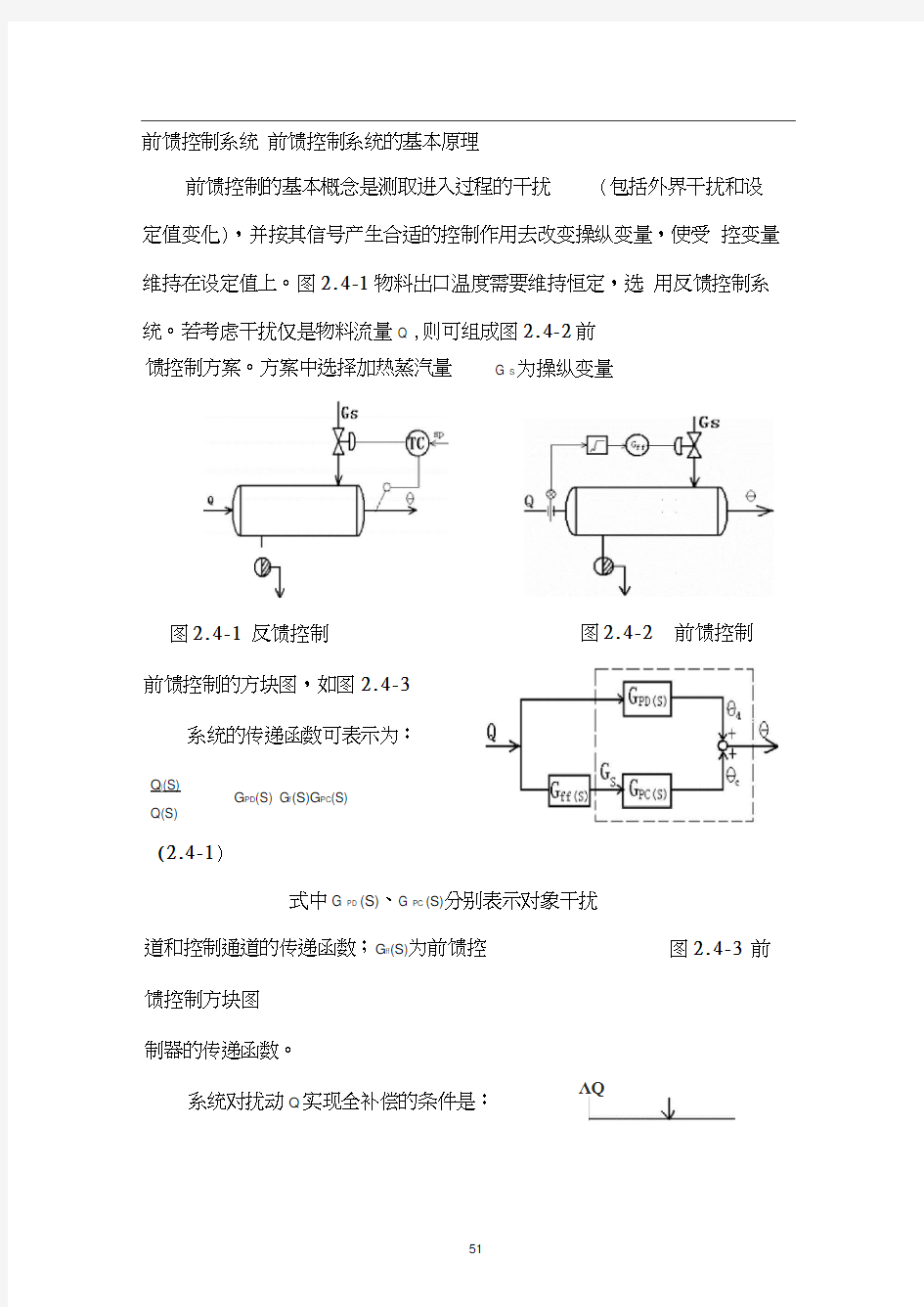
前馈控制的基本概念是测取进入过程的干扰(包括外界干扰和设定值变化),并按其信号产生合适的控制作用去改变操纵变量,使受控变量维持在设定值上。图2.4-1物料出口温度需要维持恒定,选用反馈控制系统。若考虑干扰仅是物料流量Q ,则可组成图2.4-2前
馈控制方案。方案中选择加热蒸汽量G S为操纵变量
图2.4-1 反馈控制
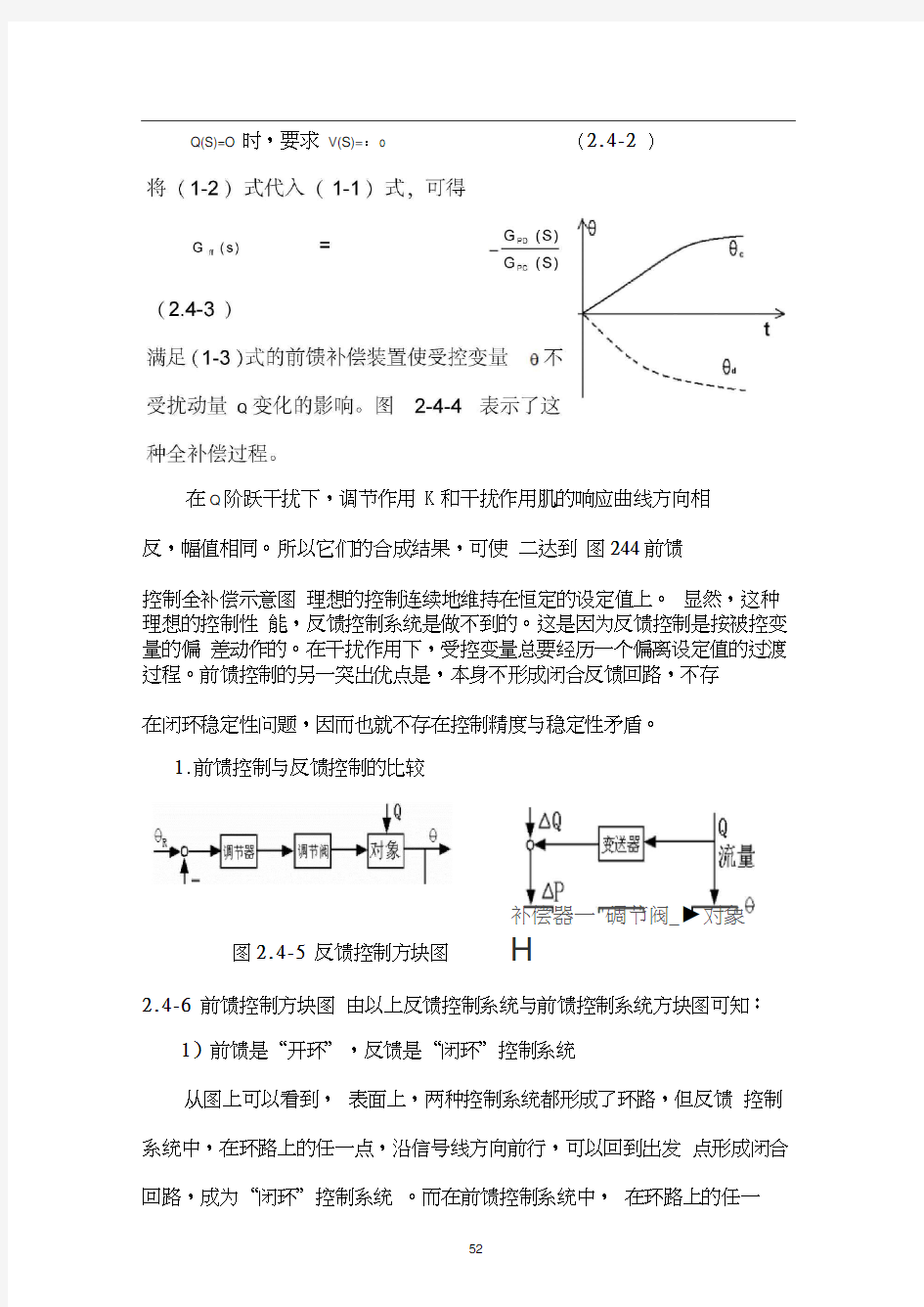
前馈控制的方块图,如图2.4-3
系统的传递函数可表示为:
Q l(S)
G PD(S) G ff(S)G PC(S)
Q(S)
(2.4-1)
式中G PD (S)、G PC (S)分别表示对象干扰
道和控制通道的传递函数;G ff(S)为前馈控
馈控制方块图
制器的传递函数。
系统对扰动Q实现全补偿的条件是:
图2.4-3 前
图2.4-2 前馈控制
ΛQ
在Q阶跃干扰下,调节作用 K和干扰作用肌的响应曲线方向相
反,幅值相同。所以它们的合成结果,可使二达到图244前馈
控制全补偿示意图理想的控制连续地维持在恒定的设定值上。显然,这种理想的控制性能,反馈控制系统是做不到的。这是因为反馈控制是按被控变量的偏差动作的。在干扰作用下,受控变量总要经历一个偏离设定值的过渡过程。前馈控制的另一突出优点是,本身不形成闭合反馈回路,不存
在闭环稳定性问题,因而也就不存在控制精度与稳定性矛盾。
图2.4-5 反馈控制方块图
2.4-6 前馈控制方块图由以上反馈控制系统与前馈控制系统方块图可知:
1)前馈是“开环”,反馈是“闭环”控制系统
从图上可以看到,表面上,两种控制系统都形成了环路,但反馈控制
系统中,在环路上的任一点,沿信号线方向前行,可以回到出发点形成闭合
回路,成为“闭环”控制系统。而在前馈控制系统中,在环路上的任一Q(S)=O 时,要求V(S)=:o (2.4-2 )
1.前馈控制与反馈控制的比较
补偿器一"碉节阀_?对象
H
点,沿信号线方向前行,不能回到出发点,不能形成闭合环路,因此称其为
“开环”控制系统。
2)前馈系统中测量干扰量,反馈系统中测量被控变量在单纯的前馈控制系统中,不测量被控变量,而单纯的反馈控制系统中不测量干扰量。
3)前馈需要专用调节器,反馈一般只要用通用调节器由于前馈控制的精确性和及时性取决于干扰通道和调节通道的特性,且要求较高,因此,通常每一种前馈控制都采用特殊的专用调节器,而反馈基本上不管干扰通道的特性,且允许被控变量有波动,因此,可采用通用调节器。
4)前馈只能克服所测量的干扰,反馈则可克服所有干扰前馈控制系统中若干扰量不可测量,前馈就不可能加以克服。而反馈控制系统中,任何干扰,只要它影响到被控变量,都能在一定程度上加以克服。
5)前馈理论上可以无差,反馈必定有差
如果系统中的干扰数量很少,前馈控制可以逐个测量干扰,加以克
服,理论上可以做到被控变量无差。而反馈控制系统,无论干扰的
多与少、大与小,只有当干扰影响到被控变量,产生“差”之后,才能知道有了干扰,然后加以克服,因此必定有差。
前馈控制系统的几种结构形式
1 .静态前馈
由(1-3 )式求得的前馈控制器,它已考虑了两个通道的动态情
况,是一种动态前馈补偿器。它追求的目标是受控变量的完全不变性。
而在实际生产过程中,有时并没有如此高的要求。只要在稳态下,实
现对扰动的补偿。令(1-3 )式中的S为0,即可得静态前馈控制算
式:
G ff(O)-G PD(O)
G PC (0)
(244 )
利用物料(或能量)衡算式,可方便地获取较完善的静态前馈算式。
例如,图2-4-2所示的热交换过程,假若忽略热损失,其热平衡关系可表述为:
QC p(九一J)=G S H S
(2.4-5 )
式中C P ――物料比热
H S——蒸汽汽化潜热
Q --------- 物料量流量
G S ――载热体(蒸汽)流量3——换热器入口温度
入一一换热器出口温度
(247)
上式即为静态前馈控制算式。相应的控制流程示于图2-4-7
图2.4-7 换热器的静态前馈控制
图中虚线框表示了静态前馈控制装置。它是多输入的,能对物料
的进口温度、流量和出口温度设定值作出静态前馈补偿。由于在
(2.4-7 )式中,Q与(θli- θ2)是相乘关系,所以这是一个非线性算式。由此构成的静态前馈控制器也是一种静态非线性控制器。
应该注意到,假若(2.4-5 )式是对热平衡的确切描述的话,那么由此而构筑的非线性前馈控制器能实现静态的全补偿。对变量间存在相乘(或相除)关系的过程,非线性是很严重的,假若通过对它们采用线性化处理来设计线性的前馈控制器,则当工作点转移时,往往
会带来很大误差。
由(2.4-5 )式可解得:
CP .
=Q (V o
H S
-R)
(2.4-6 )
用物料出口温度的设定值九代替上式中的九,可得
QC L(R O
—R)