
机器人学导论(克雷格)第二
章作业答案
-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
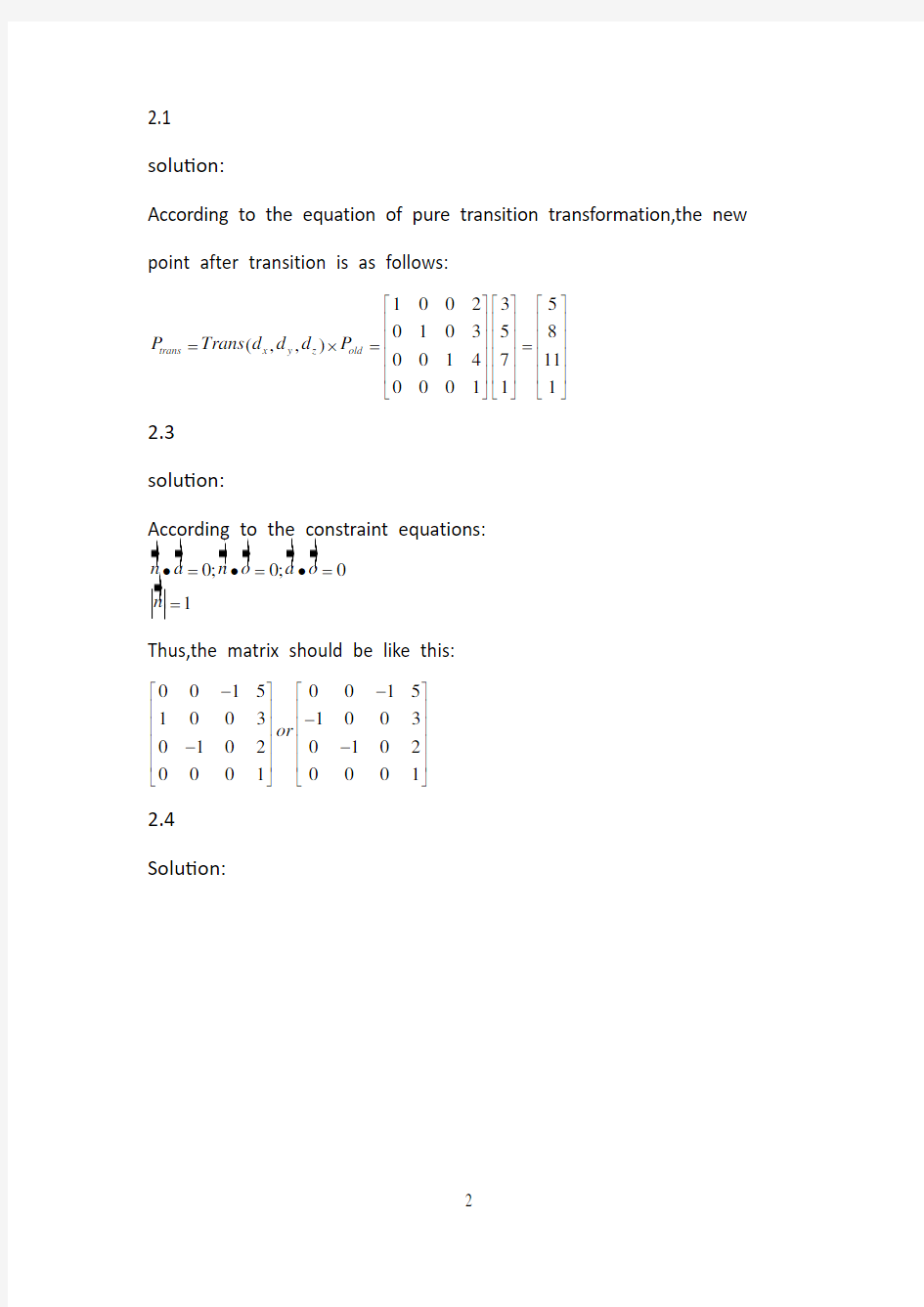
2.1
solution:
According to the equation of pure transition transformation,the new point after transition is as follows:
100235010358(,,)0014711000111trans
x y z old P Trans d d d P ??????????????????=?==?????????????????? 2.3
solution:
According to the constraint equations:
0;0;0
1n a n o a o n ?=?=?==
Thus,the matrix should be like this:
00150015100310030102010200010001or --????????-????????--????????
2.4
Solution:
X Y Z P P P ?? ? ? ???=cos 0sin 010sin 0cos θθθθ?? ? ? ?-??0n a P P P ?? ? ? ???
2.7
Solution:
According to the equation of pure rotation transformation , the new coordinates are as follows:
10022222(,45)0
3422720222new
P rot x P ???????????
?????=?==???????????????????????? 2.9
Solution:
Acording to the equations for the combined transformations ,the new coordinates are as follows:
B 01
005100051
100030010310 (,90)(5,3,6)(,90)
00106010049
00011000111 A B
P Rot z Trans Rot x P
-
??????????
??????????
-
??????????=???==
??????????
??????????
??????????Transformations relative to the reference frame
Transformations relative to the current frame
2.10
P=Trans(5,3,6)Rot(x,90)Rot(a,90) P
A
1 0 0 5 1 0 0 0 0 -1 0 0 2
= 0 1 0 3 0 0 -1 0 1 0 0 0 3
0 0 1 6 0 1 0 0 0 0 1 0 5
0 0 0 1 0 0 0 1 0 0 0 1 1
2
= -2
8
1
2.12
2.14
a) For spherical coordinates we have (for posihon )
1) r ·cos γ·sin β = 3.1375
units
units 2) r ·sin γ·sin β = 2.195
3) r ·cos β = 3.214
I) Assuming sin β is posihve, from a and b → γ=35°
from b and c → β=50°
from c → r=5
II) If sin β were negative. Then
γ=35° β=50° r=5 Since orientation is not specified, no more information is available to check the results.
b) For case I, substifate corresponding values of sin β , cos β, sin γ, cos γ and r in sperical coordinates to get: 0.5265 -0.5735 0.6275 3.1375
Tsph(r,β,γ)=Tsph(35,50,5)= 0.3687 0.819 0.439 2.195
-0.766 0 0.6428 3.214
0 0 0 1
2.16
Solution:
According to the equations given in the text book, we can get the Euler angles as follows:
arctan 2(,)arctan 2(,)y x y x a a or a a Φ=--
Which lead to :