DCDC电流反馈
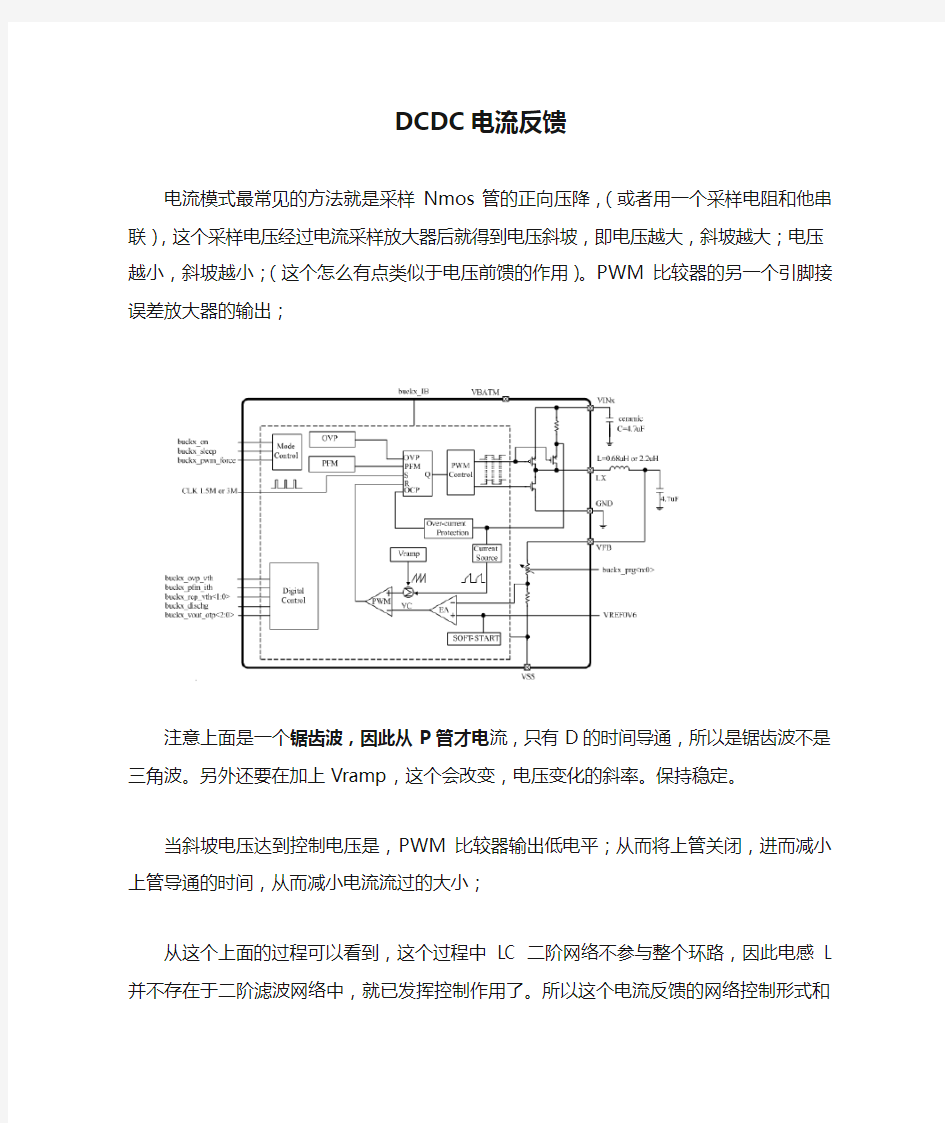
电流模式最常见的方法就是采样Nmos管的正向压降,(或者用一个采样电阻和他串联),这个采样电压经过电流采样放大器后就得到电压斜坡,即电压越大,斜坡越大;电压越小,斜坡越小;(这个怎么有点类似于电压前馈的作用)。PWM比较器的另一个引脚接误差放大器的输出;
注意上面是一个锯齿波,因此从P管才电流,只有D的时间导通,所以是锯齿波不是三角波。另外还要在加上Vramp,这个会改变,电压变化的斜率。保持稳定。
当斜坡电压达到控制电压是,PWM比较器输出低电平;从而将上管关闭,进而减小上管导通的时间,从而减小电流流过的大小;
从这个上面的过程可以看到,这个过程中LC二阶网络不参与整个环路,因此电感L并不存在于二阶滤波网络中,就已发挥控制作用了。所以这个电流反馈的网络控制形式和电压反馈还是有区别的,特别是在电流环路中,没有了LC二阶的谐振点;
电感/开关管的斜坡电流和PWM比较器的输入电压斜坡成比例,因此电压和电流可以相互转换;
次谐波不稳定的发生条件:占空比接近或者大于50%,变换器工作在CCM模式,通常在最小输入电压时,尽力排除发生次谐波不稳定的可能性;
增益图中有个莫名的尖峰,这就是次谐波不稳定所导致的。这一点远大于穿越频率。
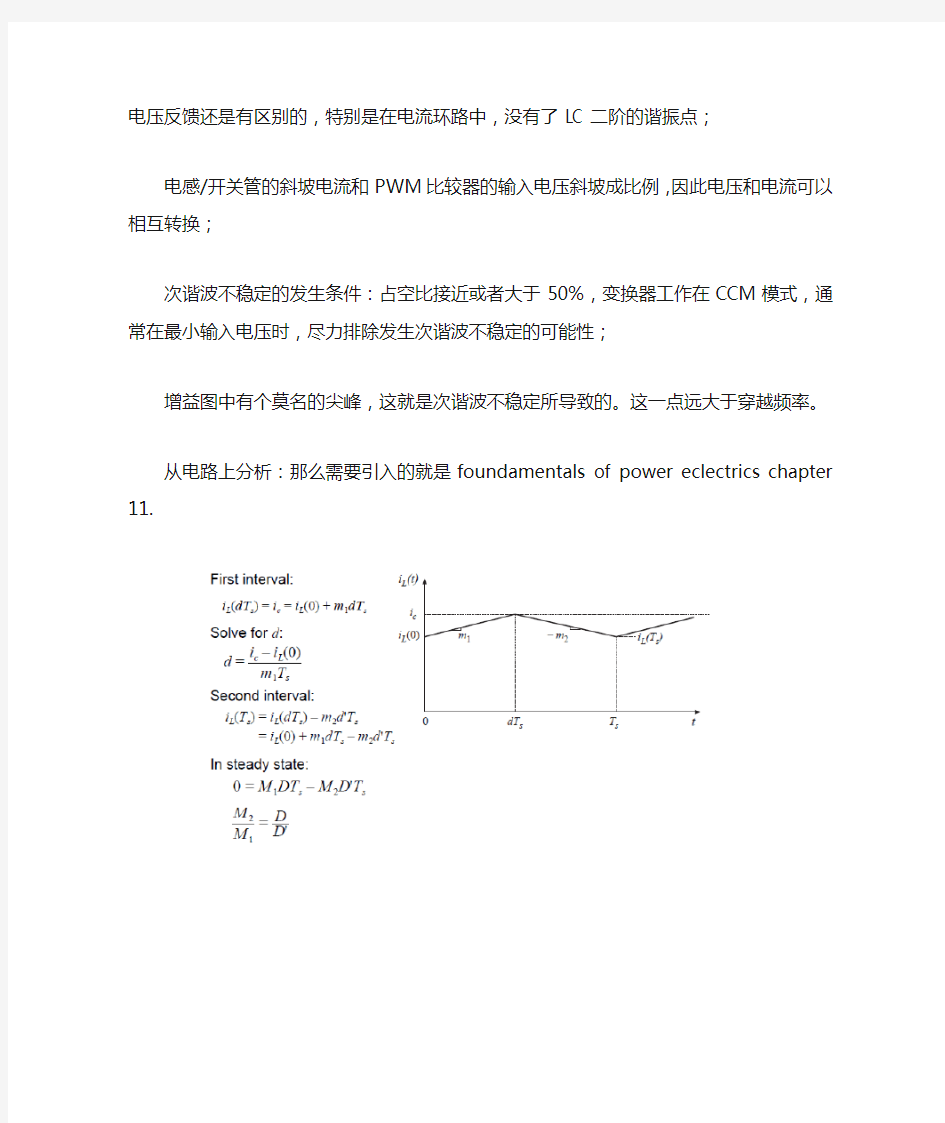
从电路上分析:那么需要引入的就是foundamentals of power eclectrics chapter 11.
那么之所以选择上面的电流模式分解,
第一步是说明在电流连续模式,且稳定的模式下,是怎么的情况,得到斜率和占空比的关系;第二步是说明在电流连续的模式,且不稳定的模式下,是怎么情况,由于电流反馈是在电流不稳定有扰动的情况下,那么就是在第二种情况下,所以要求D小于0.5;
所以从这个地方可以看出来,如果在电压输输出高的情况下,比如1.6V的时候,可能出现
不稳定的情况,通常电压都是在低压的情况0.9,1.8v,一般不会出现这种情况。
电动机的主要保护及计算 一、速断保护 1.速断高值: 动作电流高定值Isdg 计算。 按躲过电动机最大起动电流计算,即: Isdg=Krel ×Kst ×In In=Ie/nTA 式中 Krel ——可靠系数1.5; Kst ——电动机起动电流倍数(在6-8之间); In ——电动机二次额定电流; Ie ——电动机一次额定电流; n TA —— 电流互感器变比。 2. 速断低值:按躲过区外出口短路时电动机最大反馈电流计算。厂用母线出口三相短路时,根据 以 往 实测,电动 机 反馈 电流 的 暂 态 值为 5.8 Isdd=Krel ×Kfb ×In=7.8In 式中 Krel ——可靠系数1.3; Kfb ——区外出口短路时最大反馈电流倍数,取Kfb=6。 3. 动作时间整定值计算。保护固有动作时间,动作时间整定值取: 速断动作时间: tsd=0s. 二、单相接地零序过电流保护(低压电动机) 1. 一次动作电流计算。有零序电流互感器TA0的电动机单相接地保护,一次三相电流平衡时,由 于三相电流产生的漏磁通不一致,于是在零序电流 2 互感器内产生磁不 平衡电流。根据在不同条件下的多次实测结果,磁不平衡电流值均小于0.005Ip(Ip 为平衡的三相相电流),于是按躲过电动机起动时最大不平衡电流计算,低电压电动机单相接地保护动作电流可取: I0dz=(0.05-0.15)Ie 式中 I0dz ——单相接地零序过电流保护一次动作电流整定值; Ie ——电动机一次额定电流。 当电动机容量较大时可取: I0d z =(0.05-0.075)Ie 当电动机容量较小时可取: I0d z =(0.1-0.15)Ie
电流反馈运放电路设计 电流反馈放大器不受基本增益带宽积的限制,随着信号幅度的增加,带宽的损失非常小。因为可以在最小失真的条件下对大信号进行调节,这些放大器在非常高的频率下通常都具有优异的线性度。而电压反馈放大器的带宽随着增益的增加降低,电流反馈放大器在很宽的增益范围上维持其大部分带宽不变。 正因为如此,准确地说,电流反馈运放没有增益带宽积的限制。当然,电流反馈运放也不是无限快,其压摆率(Slew Rate)不受内部偏置电流的限制,但受三极管本身的速度限制。对给定的偏置电流,这就容许不用通常可能影响稳定性的正反馈或其方法来获得较大的压摆率。 那么如何构建这些电路呢?电流反馈运放具有一个与差分对相对的输入缓冲器,该输入缓冲器大多数情况下常常是射极跟随器或其它非常类似的电路。正相输入端具有高阻抗,而缓冲器的输出,即放大器的反相输入具有低阻抗。相比之下,电压反馈放大器的输入都是高阻。 电流反馈运放的输出是电压,并且它与流出或流入运放的反相输入端的电流有关,这由称为互阻抗(transimpedance)的复杂函数Z(s)来表示(图1)。在直流时,互阻抗是一个非常大的数,并且像电压反馈运放一样,它随着频率的增加具有单极点滚降特性。 电流反馈运放灵活性的关键之一是具有可调节的带宽和可调节的稳定性。因为反馈电阻的数值实际上改变放大器的交流环路的动态特性,所以能够影响带宽和稳定性两个方面。加之具有非常高的压摆率和基于反馈电阻的可调节带宽,你可以获得与器件的小信号带宽非常接近的大信号带宽。在甚至更好的情况下,该带宽在很宽的增益范围内大部分都维持不变。而因为具有固有的线性度,你也可以在高频大信号时获得较低的失真。 如何发现最佳的反馈电阻R F 由于放大器的交流特性部分地取决于反馈电阻,这就让我们能够针对每一个特定的应用“量身定制”放大器。降低反馈电阻的数值将提升环路增益。为了保持稳定性和最大的带宽,在低增益时,反馈电阻要设置为较高的数值;随着增益的上升,环路增益自然降低。如果需要高的增益,可以利用较小的反馈电阻来部分地恢复环路增益。 图1:具有Z(s)和反馈电阻的电路示意图
负反馈对放大电路的影响 所谓负反馈放大电路的反馈组态,首先要清楚一个前提,那就是一定说得是交流反馈下的情况,在直流反馈中不会涉及组态的概念。而且大家还要注意一定要是负反馈放大电路才提这个组态的概念,正反馈电路中也没有这种提法。 对于(交流)负反馈放大电路来说,我们经常是分成四种反馈组态来进行分析:电压串联负反馈、电压并联负反馈、电流串联负反馈、电流并联负反馈。很多学生学习完这部分内容后并不能建立起一个清楚的思路,到底为什么要分出这四种组态?在设计电路时如何确定选择哪种反馈? 现将负反馈放大电路反馈组态的问题简单总结一下,希望对大家能有所帮助: 1.电压反馈的重要特点是可以维持输出电压基本趋于恒定,也就是说有一个基本稳定的输出电压。 2.电流反馈的重要特点是可以维持输出电流基本趋于恒定,即有一个基本稳定的输出电流。 3.串联反馈是在输入端一侧外来输入信号和反馈信号以电压形式求和,即要想是电路能很好的起到反馈调节作用,输入信号要是恒压源(或者近似恒压源性质的信号)。 4.并联反馈是在输入端一侧外来信号和反馈信号以电流形式求和,即要想使电路能很好的起到反馈调节作用,输入信号要是恒流源(或者近似恒流源性质的信号)。 故:具体在设计电路时选择哪一种反馈形式要看具体情况而定:如果你设计的电路是需要恒定的电压信号输出,就选电压反馈;若是需要恒定的电流信号输出,就选电流反馈;输入端要提供的是恒压性质的信号,就选串联反馈;若输入端要提供的是恒流性质的信号,就选电流反馈。 总结:负反馈对放大电路性能的影响 1)负反馈使放大电路增益减小,但更稳定,减小非线性失真,抑制反馈环内噪声,扩展频带 2)串联负反馈使输入电阻增大 3)并联负反馈使输入电阻减小 4)电压负反馈使输出电阻减小 5)电流负反馈使输出电阻增大 6)电压反馈的重要特点是可以维持输出电压基本趋于恒定 7)电流反馈的重要特点是可以维持输出电流基本趋于恒定 例如:电压串联负反馈的作用: 由于电压负反馈使输出电压更稳定,所以必定输出阻抗变小;由于是串联负反馈,输入阻抗增大。
实验报告 实验名称:电压串联负反馈放大电路 实验目的: 1.了解反馈放大器的分类和判别方法 2.加深理解负反馈对放大器性能的改善作用 3.进一步熟悉放大器性能指标的测量方法 实验仪器: 1. 直流稳压电源 2. 函数信号发生器 3. 数字示波器 4. 串联电压负反馈放大电路板 实验原理: 1.反馈放大电路的概念与分类: 将放大器电路的输出的电信号(电压或电流)的一部分或全部,通过一定的方式(烦馈网络)引回到放大器输入电路中,并与输入信号一起参与控制的电路称为反馈放大电路。(如下图1-10) 从反馈的极性划分,反馈分为正反馈和负反馈。 负反馈削弱了净输入信号,降低了放大电路的增益,但负反馈的引入改善了放大器的性能。比如负反馈提高了放大器电路的工作稳定性,减小了非线性失真,抑制了内部
的噪声和干扰,展宽通频带。 正反馈增强了净输入信号,在信号产生电路中有着广泛的使用。 按照反馈网络对输出信号的采样划分,分为电压反馈和电流反馈。 按照反馈信号和输入信号在输入回路中的连接方式,分为串联反馈和并联反馈。 本实验使用并联电压放大电路。 2. 负反馈网络的性能参数和对开环电路的影响 如上图1-10,设X 为输入信号,表示电压或电流,i X 表示输入信号,f X 表示反馈信号,则净输入信号X ∑ =i X -f X 。 开环放大器的放大倍数(开环增益为): 00X A X ∑= 反馈网络的反馈系数为 0f X F X = 所以反馈放大器的放大倍数即闭环增益为:0of i X A X ==00 1A FA + 可见,加入负反馈放大器的增益减小了01FA +倍。令反馈深度D=01FA +,把FA 称为环路增益。当01FA +>>1时,称为深度反馈。得到: 0111f A FA F =≈+,可见在深度反馈中,放大系数取决于反馈网络决定的反馈系数,几乎与开环放大电路无关。而反馈网络通常由性能稳定的无源原件R ,C 组成,所以负反馈放大器较开环放大器较为稳定。 参数D 可直观显示反馈电路对放大电路的影响: 稳定性的影响: 开环放大电路稳定性为00 A A δ?=,闭环放大电路为00f f f A A D δδ?==,稳定性提高了D 倍。 负反馈电路可以展宽放大电路的通频带: 设开环放大电路的上限截止频率和下限截止频率分别为H f 和L f 。而在加入反馈电路后,上限截止频率扩大为原来的D 倍,下限截止频率缩小了D 倍。 对输入输出电阻的影响:
串联反馈式稳压电路 图XX_01 图XX_01是串联反馈式稳压电路的一般结构图,图中V I 是整流滤波电路的输出电压,T为调整管,A为比较放 大电路,V REF 为基准电压,它由稳压管D Z 与限流电阻R串联所构成的简单稳压电路获得(见齐纳二极管一节),R 1 与R 2 组成反馈网络,是用来反映输出电压变化的取样环节。 这种稳压电路的主回路是起调整作用的BJT T与负载串联,故称为串联式稳压电路。输出电压的变化量由反馈 网络取样经放大电路(A)放大后去控制调整管T的c-e极间的电压降,从而达到稳定输出电压V O 的目的。稳压原 理可简述如下:当输入电压V I 增加(或负载电流I O 减小)时,导致输出电压V O 增加,随之反馈电压V F =R 2 V O /(R 1 +R 2 ) =F V V O也增加(F V为反馈系数)。V F与基准电压V REF相比较,其差值电压经比较放大电路放大后使V B和I C减小,调 整管T的c-e极间电压V CE 增大,使V O 下降,从而维持V O 基本恒定。 同理,当输入电压V I 减小(或负载电流I O 增加)时,亦将使输出电压基本保持不变。 从反馈放大电路的角度来看,这种电路属于电压串联负反馈电路。调整管T连接成电压跟随器。因而可得 或
式中A V是比较放大电路的电压增益,是考虑了所带负载的影响,与开环增益A VO 不同。在深度负反馈条件下, 时,可得 上式表明,输出电压V O 与基准电压V REF 近似成正比,与反馈系数F V成反比。当V REF 及F V已定时,V O 也就确定了, 因此它是设计稳压电路的基本关系式。 值得注意的是,调整管T的调整作用是依靠V F 和V REF 之间的偏差来实现的,必须有偏差才能调整。如果V O 绝对 不变,调整管的V CE 也绝对不变,那么电路也就不能起调整作用了。所以V O 不可能达到绝对稳定,只能是基本稳定。 因此,图10.2.1所示的系统是一个闭环有差调整系统。 由以上分析可知,当反馈越深时,调整作用越强,输出电压V O 也越稳定,电路的稳压系数g和输出电阻R o 也越 小。 基准电压V REF 是稳压电路的一个重要组成部分,它直接影响稳压电路的性能。为此要求基准电压输出电阻小,温度稳定性好,噪声低。目前用稳压管组成的基准电压源虽然电路简单,但它的输出电阻大。故常采用带隙基准电压源,其电路如图XX_01所示。由图可知,基准电压为 从原理上说,BJT T 3的发射结电压V BE3 可用作基准电压源,但它具 有较高的负温度系数(–2mV/℃),因而必须增加一个具有正温度系数的电压I C2R 2 来补偿。I C2 是由T 1 、T 2 和R e2 构成 的微电流源电路提代。其值为 故基准电压V REF 可表示为
Current Feedback Amplifiers National Semiconductor Corporation 电流反馈放大器 美国国家半导体公司
Current Feedback Amplifiers 声明: 本文为中国电子网社区https://www.doczj.com/doc/755832188.html,网友NE5532翻译,在翻译中得到了中国电子网和广大社区网友的帮助,在这里一并致谢。 本文仅供大家学习参考,并不得用于商业目的。 欲索取国家半导体公司的原版资料,请查询国家半导体网站https://www.doczj.com/doc/755832188.html,模拟技术大学栏目。 西南科技大学(SWUST) 江海波(NE5532) 2004-7
电流反馈放大器 1. The Conventional OP Amp (6) 2. Gain Bandwidth Tradeoff (10) 3. Slew-Rate Limiting (13) 4. The Current-Feedback Amplifier (16) 5. No Gain-Bandwidth Tradeoff (22) 6. Absence of Slew-Rate Limiting (25) 7. Second-Order Effects (27) 8. CF Applications Considerations (32) 9. CF Integrators (34) 10. Stray Input-Capacitance Compensation (36) 11. 译注: (37)
Current Feedback Amplifiers In their effort to approximate the ideal OP amp, manufacturers must not only maximize the open-loop gain and minimize input-referred errors such as offset voltage, bias current, and noise, but must also ensure adequate band-width and settling-time characteristics. Amplifier dynamics are particularly important in applications like high-speed DAC buffers, subranging ADCs, S/H circuits, ATE pin drivers, and video and IF drivers (Reference 1) Being basically voltage-processing devices, OP amps subject to the speed limitations inherent to voltage-mode operation, stemming primarily from the stray capacitances of nodes and the cutoff frequencies of transistors. Particularly severe is the effect of the stray capacitances between the input and output nodes of high-gain inverting stages because of the Miller effect which multiplies the stray capacitance by the voltage gain of the stage. On the other hand, it has long been recognized that current manipulation is inherently faster than voltage manipulation. The effect of stray inductances in a circuit is usually less severe than that of its stray capacitances, and BJTs can switch currents much more rapidly than voltages. These technological reasons form the basis of emitter-coupled logic, bipolar DACs, current conveyors, and the high-speed amplifier topology know as current-feedback (Reference 2) For true current-mode operation, all nodes in the circuit should ideally be kept at fixed voltages to avoid the slow-down effect by their stray capacitances. However, since the output of the amplifier must be a voltage, some form of high-speed voltage-mode operation must also be provided at some point. This is achieved by employing gain configurations that are inherently immune from the Miller effect, such as the common-collector and the cascode configurations, and by driving the nodes with push-pull stages to rapidly charge/discharge their stray capacitances. To ensure symmetric rise and fall times, the NPN and PNP transistors must have comparable characteristics in terns of cutoff frequency . Traditionally, monolithics PNP’s have been plagued by much poorer performance characteristics than their NPN counterparts. However, the recent development of truly complementary high-speed processes makes it possible to achieve monolithics speeds that were hitherto available only in hybrid form. t f The advantages of the current-feedback topology are best appreciated by comparing it against that of the conventional OP amp (Reference 3, Reference 4).
实验五 电流串联负反馈 一、实验目的 1.学会识别放大器中负反馈电路的类型。 2.了解不同反馈形式对放大器输入、输出电阻的不同影响。 3.加深理解负反馈对放大器性能的影响。 二、实验原理 图5-1为电流串联负反馈电路。从图中 图5-1 电流串联负反馈放大器 可以看出,F=O F U U =’L E R R R ′L =R C ∥R L A VO = i U Uo ' A VF=F i o i o U u U U U +='=FAvo Avo +1 通过等效电路计算可得, A VF ==E FE IE L FE R H H R H )1('++ 深度负反馈的情况下 A VF = E L R R ' 三、实验设备、部件与器件 1.+12V 直流电源 2.函数信号发生器 3.双踪示波器(另配) 4.频率计 5.交流毫伏表 6.直流电压表 7.晶体三极管3DG6、电阻、电容及插线若干。 四、实验内容 1.测量和调整静态工作点 将实验台面板上的单管/负反馈两级放大器接成图5-1所示电流串联负反馈电路。并把R F1短路,即电路处于无反馈状态。调节R W1使得I C =C C C R U E -≈IE=E E R U =2mA ,用万用电表测量晶体管的集电极、基极和发射极对地的电压U C ,U B 和U E 。 2.测量无反馈(基本放大器)的各项性能指标 1)测量电压放大倍数A V 在放大器输入端(B 点)加入U I =5mV ,1KHz 的正弦信号,用示波器观察放大器输出电压U L 的波形。在U L 不失真的情况下,用交流毫伏表测量U L ,利用A U =求出基本放大器的电
科学技术学院 SCIENCE & TECHNOLOGY COLLEGE OF NANCHANG UNIVERSITY 《工程训练》报告 REPORT ON ENGINEERING TRAINING 题目:分立式元器件串联反馈型稳压电源 学科部、系:信息学科部自动化系 专业班级:08自动化 学号:7021308055 学生姓名:周全兵 指导教师:何尚平涂剑鹏朱淑云起讫日期:2010-5-17 ~ 2010-5-29
分立式元器件串联反馈型稳压电源专业:08自动化学号:7021308055 学生姓名:周全兵指导教师:何尚平涂剑鹏朱淑云 摘要 当今社会人们极大的享受着电子设备带来的便利,但是任何电子设备都有一个共同的特点--电源电路。可以说电源电路是一切电子设备的基础,没有电源电路就不会有如此种类繁多的电子设备。 任何一种电路都需要电源,它是电子电路工作的“能源”和“动力”。不同的电路对电源的要求是不同的。在很多电子设备和电路中需要一种当电网电压波动或负载发生变化时,输出电压仍能基本保持不变的电源。电子设备中的电源一般由交流电网提供,再经变压、整流、滤波、和稳压四个主要部分构成。本次设计的主要内容是围绕着如何使分立式元器件串联可调直流稳压电源输出直流电压稳定、脉动成分减小而展开的。首先介绍了变压器的基本工作原理及全波整流电路的工作原理,接着介绍了电容滤波电路的性能特点,然后引入了具有放大环节和辅助电源的串联可调式稳压电源,系统地介绍了一些在本次实训中要用到的元器件。同时并在电路中采用了提高稳定度,提高温度稳定性及限流型过流保护电路的具体措施,以确保电路安全稳定的工作。在完成该电路理论地设计与计算之后,我们又全面学习了Proteus 和Altium Designer两个在电子电路设计与制作中必须熟知的两个软件,实践了PCB制板的全过程。最后,安装元器件,调试,分析,测试性能验收。
1.电压反馈放大器与电流反馈放大器的区别: 1.带宽VS增益 电压反馈型放大器的-3DB带宽由R1、Rf和跨导gm共同决定,这就是所谓的增益帯宽积的概念,增益增大,带宽成比例下降。同时运放的稳定性有输入阻抗R1和反馈阻抗Rf共同决定。而对于电流反馈型运放,它的增益和带宽是相互独立的,其-3DB带宽仅由Rf决定,可以通过设定Rf得到不同的带宽。再设定R1得到不同的增益。同时,其稳定性也仅受Rf影响。 2.反馈电阻的取值 电流型运放的反馈电阻应根据数据手册在一个特定的范围内选取,而电压反馈型的反馈电阻的选取就相对而言宽松许多。需要注意的是电容的阻抗随着频率的升高而降低,因而在电流反馈放大器的反馈回路中应谨慎使用纯电容性回路,一些在电压反馈型放大器中应用广泛的电路在电流反馈型放大器中可能导致振荡。比如在电压反馈型放大器我们常会在反馈电阻Rf上并联一个电容Cf来限制运放的带宽从而减少运放的带宽噪声(Cf也常常可以帮助电压反馈型放大器稳定),这些如果运用到电流反馈放大器上,则十有八九会使你的电路振荡。 3.压摆率 当信号较大时,压摆率常常比带宽更占据主导地位,比如同样用单位增益为280MHZ的放大器来缓冲10MHZ,5V的信号,电流反馈放大器能轻松完成,而电压反馈放大器的输出将呈现三角波,这是压
摆率不足的典型表现。通常来说,电压反馈放大器的压摆率在500V每us,而电流反馈放大器拥有数千V每us. 4.如何选择两类芯片 a,在低速精密信号处理中,基本看不到电流反馈放大器的身影,因为其直流精度远不如精密电压反馈放大器。 b.在高速信号处理中,应考虑设计中所需要的压摆率和增益帯宽积;一般而言,电压反馈放大器在10MHZ以下,低增益和小信号条件下会拥有更好的直流精度和失真性能;而电流反馈放大器在10MHZ以上,高增益和大信号调理中表现出更好的带宽和失真度。当下面两种情况出现一种时,你就需要考虑一下选择电流反馈放大器:1,噪声增益大于4;2,信号频率大于10MHZ。 编辑本段2.应用时需要注意的问 1、电流反馈型放大器不能用做积分器 2、电流反馈型放大器在反馈电阻两端不能用并联电容的方法消除振荡 3、电流反馈型放大器的输出和反向输入端不能跨接电容 4、电流型反馈放大器的反馈误差量是运放负管脚的电流值,Vout=Zt×In 5、电流型反馈放大器的反馈电阻不能选择过大的值 6、电流型反馈放大器的反馈阻值会影响放大的稳定性和带宽 7、电流型反馈放大器不能用作电压跟随器的接法 8、电流型反馈放大器的压摆率比较高 9、电流型反馈放大器无增益带宽积这一个参数10、电流型反馈放大器的增益和闭环带宽可以分别的设置11、反馈电阻有一个最佳值,既可以保证最大带宽,也可以保证稳定的放大的不振荡。
放大电路负反馈的原理特点 一、提高放大倍数的稳定性 引入负反馈以后,放大电路放大倍数稳定性的提高通常用相对变化量来衡量。 因为: 所以求导得: 即: 二、减小非线性失真和抑制噪声 由于电路中存在非线性器件,会导致输出波形产生一定的非线性失真。如果在放大电路中引入负反馈后,其非线性失真就可以减小。 需要指出的是:负反馈只能减小放大电路自身产生的非线性失真,而对输入信号的非线性失真,负反馈是无能为力的。 放大电路的噪声是由放大电路中各元器件内部载流子不规则的热运动引起的。而干扰来自于外界因素的影响,如高压电网、雷电等的影响。负反馈的引入可以减小噪声和干扰,但输出端的信号也将按同样规律减小,结果输出端的信号与噪声的比值(称为信噪比)并没有提高。 三、负反馈对输入电阻的影响 由于负反馈可以提高放大倍数的稳定性,所以引入负反馈后,在低频区和高频区放大倍数的下降程度将减小,从而使通频带展宽。 引入负反馈后,可使通频带展宽约(1+AF)倍。 四、负反馈对输入电阻的影响 (a)串联反馈(b)并联反馈
图1 求输入电阻 1、串联负反馈使输入电阻提高 引入串联负反馈后,输入电阻可以提高(1+AF)倍。即: 式中:ri为开环输入电阻 rif为闭环输入电阻 2、并连负反馈使输入电阻减小引入并联负反馈后,输入电阻减小为开环输入电阻的 1/(1+AF )倍。 即: 五、负反馈对输出电阻的影响 1、电压负反馈使输出电阻减小 放大电路引入电压负反馈后,输出电压的稳定性提高了,即电路具有恒压特性。 引入电压负反馈后,输出电阻rof减小到原来的1/(1+AF)倍。 2、电流负反馈使输出电阻增大 放大电路引入电流负反馈后,输出电流的稳定性提高了,即电路具有恒流特性。 引入电流负反馈后,使输出电阻rof增大到原来的(1+AF)倍。 3、负反馈选取的原则 (1)要稳定静态工作点,应引入直流负反馈。 (2)要改善交流性能,应引入交流负反馈。 (3)要稳定输出电压,应引入电压负反馈; 要稳定输出电流,应引入电流负反馈。 (4)要提高输入电阻,应引入串联负反馈; 要减小输入电阻,应引入并联负反馈。 六、深度负反馈的特点 1、串联负反馈的估算条件 反馈深度(1+AF)>>1的负反馈,称为深度负反馈。通常,只要是多级负反馈放大电路,都可以认为是深度负反馈.此时有: 因为:, 所以:xi≈xf 估算条件:
电动机的主要保护及计算 一、速断保护 1.速断高值: 动作电流高定值Isdg 计算。 按躲过电动机最大起动电流计算,即: Isdg=Krel ×Kst ×In In=Ie/nTA 式中 Krel ——可靠系数1.5; Kst ——电动机起动电流倍数(在6-8之间); In ——电动机二次额定电流; Ie ——电动机一次额定电流; n TA —— 电流互感器变比。 2. 速断低值:按躲过区外出口短路时电动机最大反馈电流计算。厂用母线出口三相短路时,根据 以 往 实测,电动 机 反馈电流 的 暂 态 值为 5.8 Isdd=Krel ×Kfb ×In=7.8In 式中 Krel ——可靠系数1.3; Kfb ——区外出口短路时最大反馈电流倍数,取Kfb=6。 3.动作时间整定值计算。保护固有动作时间,动作时间整定值取: 速断动作时间: tsd=0s. 二、单相接地零序过电流保护(低压电动机) 1. 一次动作电流计算。有零序电流互感器TA0的电动机单相接地保护,一次三相电流平衡时,由 于三相电流产生的漏磁通不一致,于是在零序电流 2 互感器内产生磁不 平衡电流。根据在不同条件下的多次实测结果,磁不平衡电流值均小于0.005Ip(Ip 为平衡的三相相电流),于是按躲过电动机起动时最大不平衡电流计算,低电压电动机单相接地保护动作电流可取: I0dz=(0.05-0.15)Ie 式中 I0dz ——单相接地零序过电流保护一次动作电流整定值; Ie ——电动机一次额定电流。 当电动机容量较大时可取: I0d z =(0.05-0.075)Ie 当电动机容量较小时可取: I0d z =(0.1-0.15)Ie
■ 在相同工艺和功耗下,电流反馈型运放比电压反馈型运放的FPBW 更 高、失真更小 ■ 电流反馈型运放的反向输入阻抗低、同相输入阻抗高 ■ 电流反馈型运放的闭环带宽仅由内部主导极点电容C p 和外部反馈电阻 R 2决定,而与增益设置电阻R 1无关 图1.17 电流反馈型运放的特性总结 1.4 运放反馈电容的作用 在这里,需要给出噪声增益的定义。噪声增益是一个统计量,与运放的输入终端相连的小振幅噪声电压源经过放大电路后,在输出端测量得到的放大程度即为噪声增益。运放的输入电压噪声就是通过这种方式建模的。另外,需要注意的是直流噪声增益也可以用于将输入电压偏移(或者运放的其他输入误差源)反映到输出端。 噪声增益不同于信号增益。如图1.18所示,给出了反向和同相模式下的噪声增益和信号增益原理及对比。可以发现,在同相模式下,噪声增益等于信号增益;然而,在反向模式下,噪声增益不变,但是信号增益是–R 2/R 1。在此结构中,电阻作为反馈器件,可以对网络产生反作用。 信号增益211R R =+ 信号增益21R R ?= 噪声增益211R R =+ 噪声增益211R R =+ 对于VFB 运放:闭环BW= u CL f f G = 图1.18 反相和同相模式下的噪声增益和信号增益比较 如图1.19所示是噪声增益的另外两种结构图,在这种结构模式中,通过在运放的输入端增加一个电阻R 3,使得噪声的增益能够与信号增益相独立,即在信号增益发生变化的时候,噪声增益可以保持不变。一般互补运放在低噪声增益情况下不稳定,而通过采用这种技术结构后,可以起到稳定互补运放的作用,但是,此项技术也会使得对输入噪声和偏移电压的敏感性相应地增加。 单位增益带宽频率 噪声增益
各种负反馈的作用 1. 电压负反馈 电压负反馈是指从放大器输出端取出输出信号电压的一部分(或全部)作为负反馈信号,也就说负反馈信号VF与输出电压VO成正比。 电压负反馈的特点是: 电压负反馈能够稳定放大器的输出信号电压。 由于电压负反馈元件是并联在放大器输出端与地之间的,所以能够降低放大器的输出电压 2. 电流负反馈 电流负反馈是指从放大器输出端取出输出信号电流的一部分作为负反馈信号,换句话说:反馈信号VF与输出电流IO成正比。 电流负反馈的特点是: 电流负反馈能够定放大器的输出信号电流。 由于电压负反馈元件是串联在放大器输出回路中的,所以提高了放大器的输出电阻。 3. 串联负反馈 电压和电流负反馈都是针对放大器输出端而言的,指负反馈信号从放大器输出端的取出方式。串联和并联负反馈则是针对放大器输入端而言的,指负反馈信号加到放大器输入端的方式。 串联负反馈网络取出的负反馈信号VF,同放大器的输入信号Vi以串联形式加到放大器的输入回路中的,这样的负反馈称为串联负反馈。 串联负反馈的特点是: 串联负反馈右以降低放大器的电压放大倍数,稳定放大器的电压增益。 由于串联负反馈元件是串联在放大器输入回路中的,所以这种负反馈可以提高放大器的输入电阻。 4. 并联负反馈 并联负反馈是指负反馈网络取出的负反馈信号VF,同放大大器的输入信号Vi以并联形式加到放大器的输入回路中,这样的负反馈称为并联负反馈。 并联负反馈的特点是: 并联负反馈降低放大器的电流放大倍数,稳定放大器的电流增益。 由于并联负反馈元件是与放大器输入电阻相并联的,所以这种负反馈降低了放大器的输入电阻。 5. 负反馈电路种类
简易串联稳压电源1、原理分析图4-1-1是简易串联稳压电源,T1是调整管,D1是基准电压源,R1是限流电阻,R2是负载。由于T1基极电压被D1固定在UD1,T1发射结电压(UT1)BE在T1正常工作时基本是一个固定值(一般硅管为0.7V,锗管为0.3V),所以输出电压UO=UD1-(UT1)BE。当输出电压远大于T1发射结电压时,可以忽略(UT1)BE,则UO≈UD1。 下面我们分析一下建议串联稳压电源的稳压工作原理:假设由于某种原因引起输出电压UO降低,即T1的发射极电压(UT1)E降低,由于UD1保持不变,从而造成T1发射结电压(UT1)BE上升,引起T1基极电流(IT1)B上升,从而造成T1发射极电流(IT1)E被放大β倍上升,由晶体管的负载特性可知,这时T1导通更加充分管压降(UT1)CE将迅速减小,输入电压UI更多的加到负载上,UO得到快速回升。这个调整过程可以使用下面的变化关系图表示:UO↓→(UT1)E↓→UD1恒定→(UT1)BE↑→(IT1)B↑→(IT1)E↑→(UT1)CE↓→UO↑当输出电压上升时,整个分析过程与上面过程的变化相反,这里我们就不再重复,只是简单的用下面的变化关系图表示:UO↑→(UT1)E↑→UD1恒定→(UT1)BE↓→(IT1)B↓→(IT1)E↓→(UT1)CE↑→UO↓这里我们只分析了输出电压UO降低的稳压工作原理,其实输入电压UI降低等其他情况下的稳压工作原理都与此类似,最终都是反应在输出电压UO降低上,因此工作原理大致相同。从电路的工作原理可以看出,稳压的关键有两点:一是稳压管D1的稳压值UD1 要保持稳定;二是调整管T1要工作在放大区且工作特性要好。其实还可以用反馈的原理来说明简易串联稳压电源的工作原理。由于电路是一个射极输出器,属于电压串联负反馈电路,电路的输出电压为UO=(UT1)E≈(UT1)B,由于(UT1)B保持稳定,所以输出电压UO也保持稳定。简易串联稳压电源由于使用固定的基准电压源D1,所以当需要改变输出电压时只有更换稳压管D1,这样调整输出电压非常不方便。另外由于直接通过输出电压UO的变化来调节T1的管压降(UT1)CE,这样控制作用较小,稳压效果还不够理想。因此这种稳压电源仅仅适合一些比较简单的应用场合。 2、电路实例图4-1-1是简易串联稳压电源的一个实际应用电路,这个电路用在无锡市无线电五厂生产的“咏梅”牌771型8管台式收音机上。其中T8、DZ、R18构成简易稳压电路,B6、D4~D7、C21组成整流滤波电路。由于T8发射结有0.7V压降,为保证输出电压达到6V,应选用稳压值为 6.7V左右的稳压管。
电流反馈型运放 刚开始使用电流反馈型运放时,总会从资料上看到这样的信息:电流反 馈型运放直流特性不好,适合放大高频的交流信号;带宽不因频率增加而减小,也就是没有增益带宽积的概念;再深一点,CFB运放的反馈电阻需为恒定的值。为了弄清楚这些问题,我看过很多英文应用手册。但看完之后,总觉得云里雾里,不知所云。终有一天,认真推导了电流反馈运放传递函数后恍然大悟,从 理论上明白了电流反馈运放的原理。现在整理总结一下我的学习过程,希望对 大家有用。 我们开始研究电流反馈型CFB运放就从下面这个原理框图开始。 首先,CFB运放的输入端不是电压反馈型放大电路的差分输入端,而 是一个从V+到V-输入端的一个增益为的跟随电路,这个增益非常接近于1,实际约为0.996或更高的值,但肯定小于1.00。(如下图所示 的CFB与VFB输入级的对比)这个跟随输入极有一个输出电阻Ri,理 论上这个电阻应该等于0,但实际上为几欧到几十欧的水平。用于反 馈的误差电流信号就从Ri上流过从V-端口流出或流入。关于CFB运 放的输入级以后会专门拿出一小节来分析,且耐心等待。这里只要理
解为电流反馈运放的输入级是一个从V+至V-的跟随器就好了。 (a)VFB运放输入级 (b)CFB运放输入级 误差电流通过镜像到第二级的增益阻抗Z(s)上形成电压。注意,CFB 运放的第二级不是电压增益G,而是互阻增益Z(s)。这是因为运放的输出是电压,而误差信号是个电流,只有通过互阻抗来实现I-V变换。 Rg和Rf是用于设定增益的反馈网络电阻。与VFB运放很相似,很好理解。 ?上一小节从CFB运放的原理框图解释了CFB的内部原理。这一小节我们就来用简单的数学公式推导一下CFB运放的传递函数,从而揭示为什么CFB运放为什么需要固定反馈电阻的值。 还是看着下面的图,请拿出笔来纸来,如果想真正搞明白电流反馈运放的传递函数公式,明白的像电压反馈运放那样的话,一定拿出笔来,一步一步的推导。
一.电压串联负反馈: 图Z0303(a)为两级电压串联负反馈放大电路,图(b)是它的交流等效电路方框图。 1.反馈类型的判断 (1)找出联系输出回路与输入回路的反馈元件。图Z0303(a)中Rf、Cf、Re1是联系输出回路与输入回路的元件,故Rf、Cf、Re1是反馈元件,它们组成反馈网络,引入级间反馈。 (2)判断是电压反馈还是电流反馈。 可用两种方法来判别,一是反馈网络直接接在放大电路电压输出端,故为电压反馈;二是令Uo = 0,因Uf由Rf、Re1 对Uo分压而得,故Uf= 0反馈消失,所以为电压反馈; (3)判别是串联反馈还是并联反馈。 由图Z0303(a)可以看出:Ube = Ui - Uf 即输入端反馈信号与输入信号以电压形式相迭加,故为串联反馈,也可令Ui=0,此时Uf仍能作用到放大电路输入端,故为串联反馈;还可以根据反馈信号引至共射电路发射极则为串联反馈。 (4)判别反馈极性。 假定Ui为+,则经两级共射电路放大后,Uo为+,经Rf与Re1 分压得到的Uf也为+,结果使得放大电路有效输入信号减弱,故为负反馈。 综上判断结果、该电路为电压串联负反馈放大电路。 2、反馈对输出电量的稳定作用 放大电路引入电压负反馈后,能够使输出电压稳定。任何外界因素引起输出电压不稳时,输出电压的变化将通过反馈网络立即回送到放大电路的输入端,并与原输入信号进行比较,得出与前一变化相反的有效输人信号,从而使输出电压的变化量得到削弱,输出电压便趋于稳定。 可见,负反馈使放大电路具有了自动调节能力。电压负反馈能够稳定输出电压。 3、信号源内阻对串联反馈效果的影响 由上面的讨论可见,对串联反馈Ube = Ui - Uf ,显然,UI越稳定,Uf 对Ube 的影响就越强,控制作用就越灵敏。当信号源内阻Rs = 0时,信号源为恒压源,Us就为恒定值,则Uf的增加量就全部转化为Ube 的减小量,此时,反馈效果最强。因此,串联反馈时,Rs 越小越好,或者说串联反馈适用于信号源内阻Rs 小的场合。 4、放大倍数及反馈系数的含义 对电压串联负反馈电路, Xi = Ui, Xo = Uo,Xf = Uf 故: AUf、FU,分别称为闭环电压放大倍数和电压反馈系数。
模拟电子技术课程设计 院 部 名 称 机电工程学院 专 业 电气工程及其自动化 班 级 学 生 姓 名 学 号 成绩
目录 第一章设计目的和要求..................................................... 1.1 实验目的 1.2 实验要求 第二章电路原理及分析....................................................... 2.1 题目分析 2.2 电路原理构成 2.3 稳压原理与输出电压的调节 第三章电路设计及构成................................................................ 3.1 设计思想 3.2 原件参数表 第四章仿真分析................................................................ 4.1 静态测量 4.2 动态测量 第五章实验结果分析................................................. 5.1 误差分析 第六章设计小结.................................................
串联反馈型稳压电路 第一章·设计要求和目的 1.1实验目的 (1) 通过实验进一步掌握稳压电路的工作原理。 (2) 学会电源电路的设计与调试方法。 1.2 实验要求 (1) 性能指示要求: a. 输入220V 交流电压,具有输出电压可调功能,输出电压范围3~18V 。 b. 电路具有自身保护功能,具有一定的带负载能力。输出电流大于500mA c. 负载电流为500mA 时,过流保护电路工作 d. 电路具有一定的抗干扰能力 (2) 报告要求: a. 作出电路设计与分析 b. 检验所设计电路是否满足设计要求。若改变电路或元件参数值,写出原因根系及调整后的电路或元件参数值 第二章.题目分析 2.1 电路框图 (1) 电子电路工作时都需要直流电源提供能量,电池因使用费用高,一般只用于低功耗便携式的仪器设备中。 电源变压器: 将交流电网电压v1变为合适的交流电压 整流电路: 将交流电压v2变为脉动的直流电压 滤波电路: 将脉动直流电压v3转变为平滑的直流电压v4 稳压电路: 清除电网波动及负载变化的影响,保持输出电压vo 的稳定。 四个环节的工作原理如下: 整 流 电 路 滤 波 电 路 稳 压 电 路 v 1 v 2 v 3 v 4 v o
电动机缺相运行电流探讨 三相异步电动机缺相运行,是低压三相异步电动机最常见的故障。但遗憾的是,教科书和电工手册中对其电流变化情况,只是笼统地定性描述,缺乏具体数据和详细地技术分析。(2004年第10期《电世界》杂志的第44页读者信箱栏目,刊登了施凉奎先生的答重庆侠平问《三相异步电动机在缺相运行时,会导致电动机过电流否?》一文,施凉奎先生认为:缺相运行时的电动机空载或负载电流,一般都要比正常运行时约大√3倍。笔者认为施凉奎先生对三相异步电动机缺相运行电流的分析欠全面,在不同的运行状态下的情况是不一样的。)为了让广大读者对该问题有一个正确的认识,有必要对三相异步电动机缺相运行电流变化规律进行较全面、科学、准确地分析。 三相异步电动机缺相运行,严格地说,可分为定子缺相和转子缺相两种。常见的是定子缺相。本文将对这两类情况的运行电流变化规律进行讨论。 1 定子缺相运行 (1)定子Y接法缺相运行
如图1所示,正常Y接法运行的定子,无论是一相绕组断线,还是一相电源线断线,都形成另两相绕组反串联接在电源单相线电压Ue下,如图4所示。每相绕组承担的电压为0.5Ue。 三相正常运行输入功率Pe为: Pe=3×(Ue/√3)×Ie×cosφ=√3UeIecosφ 式中Ie为电机的额定相电流。 设cosφ=常数,在保证电流不超过额定值Ie的条件下,缺相运行电机允许输入功率Pd为: Pd=2×(0.5UeIecosφ)=UeIecosφ Pd/Pe=1/√3=0.577 (1) 从(1)式可看出,在保证电流不超过额定值Ie的条件下,正常Y接法缺相运行时电机的功率只能达到三相运行时的57.7%。带有某一负载的电机运行中突然缺相运行时,转速会稍微下降,轴负载功率由两相绕组承担,缺相运行电流增大到三相正常运行电流的√3倍(注意不是大√3倍),此时,电机往往工作于过负载状态。(施凉奎先生认为:缺相运行时的电动机空载或负载电流,一般都要比正常运行时约大√3倍。准确地说,三相异步电动机正常Y接法的定子缺相运行时空载或负载电流,约是正常运行时的√3倍。) 注:为保证功率不变,即Pe=Pd,假设正常运行时电流为Ie,缺相时电流为I′,则有√3UeIecosφ=2×(0.5UeI′cosφ)=UeI′cosφ,可得I′=√3Ie。 事实上,在低压小型电动机中,仅4kW以下电动机定子采用Y接法,而大量小型电动机采用的是△接法。 (2)定子△接法缺相运行