第8章磁电式传感器
一、单项选择题
1、下列不属于霍尔元件基本特性参数的是()。
A. 控制极内阻
B. 不等位电阻
C. 寄生直流电动势
D. 零点残余电压
2、制造霍尔元件的半导体材料中,目前用的较多的是锗、锑化铟、砷化铟,其原因是这些
()。
A.半导体材料的霍尔常数比金属的大
B.半导体中电子迁移率比空穴高
C.半导体材料的电子迁移率比较大
D.N型半导体材料较适宜制造灵敏度较高的霍尔元件
3、磁电式传感器测量电路中引入积分电路是为了测量()。
A.位移B.速度
C.加速度 D.光强
4、为了提高磁电式加速度传感器的频响范围,一般通过下面哪个措施来实现()。
A.减小弹簧片的刚度 B. 增加磁铁的质量
C. 减小系统的阻尼力
D. 提高磁感应强度
5、磁电式传感器测量电路中引入微分电路是为了测量()
A.位移B.速度
C.加速度 D.光强
6、霍尔电势与()成反比
A.激励电流 B.磁感应强度
C.霍尔器件宽度 D.霍尔器件长度
7、霍尔元件不等位电势产生的主要原因不包括()
A.霍尔电极安装位置不对称或不在同一等电位上
B.半导体材料不均匀造成电阻率不均匀或几何尺寸不均匀
C.周围环境温度变化
D.激励电极接触不良造成激励电流不均匀分配
二、多项选择题
三、填空题
1、通过将被测量转换为电信号的传感器称为磁电式传感器。
2、磁电作用主要分为和两种情况。
3、磁电感应式传感器是利用导体和磁场发生相对运动而在导体两端输出
的原理进行工作的。
4、磁电感应式传感器是以原理为基础的。
5、当载流导体或半导体处于与电流相垂直的磁场中时,在其两端将产生电位差,这一现象被称为。
6、霍尔效应的产生是由于运动电荷受作用的结果。
7、霍尔元件的灵敏度与和有关。
8、霍尔元件的零位误差主要包括和。
9、磁电式传感器是半导体传感器,是基于的一类传感器。
10、磁电式传感器是利用原理将运动速度转换成信号输出。
11、磁电式传感器有温度误差,通常用分路进行补偿。
12、霍尔效应是导体中的载流子在磁场中受作用发生的结果。
13、磁电式传感器是利用而在产生感应电势的原理进行工作的。
14、霍尔传感器的灵敏度与霍尔系数成正比而与成反比。
四、简答题
1、简述变磁通式和恒磁通式磁电传感器的工作原理。
2、磁电式传感器的误差及其补偿方法是什么?
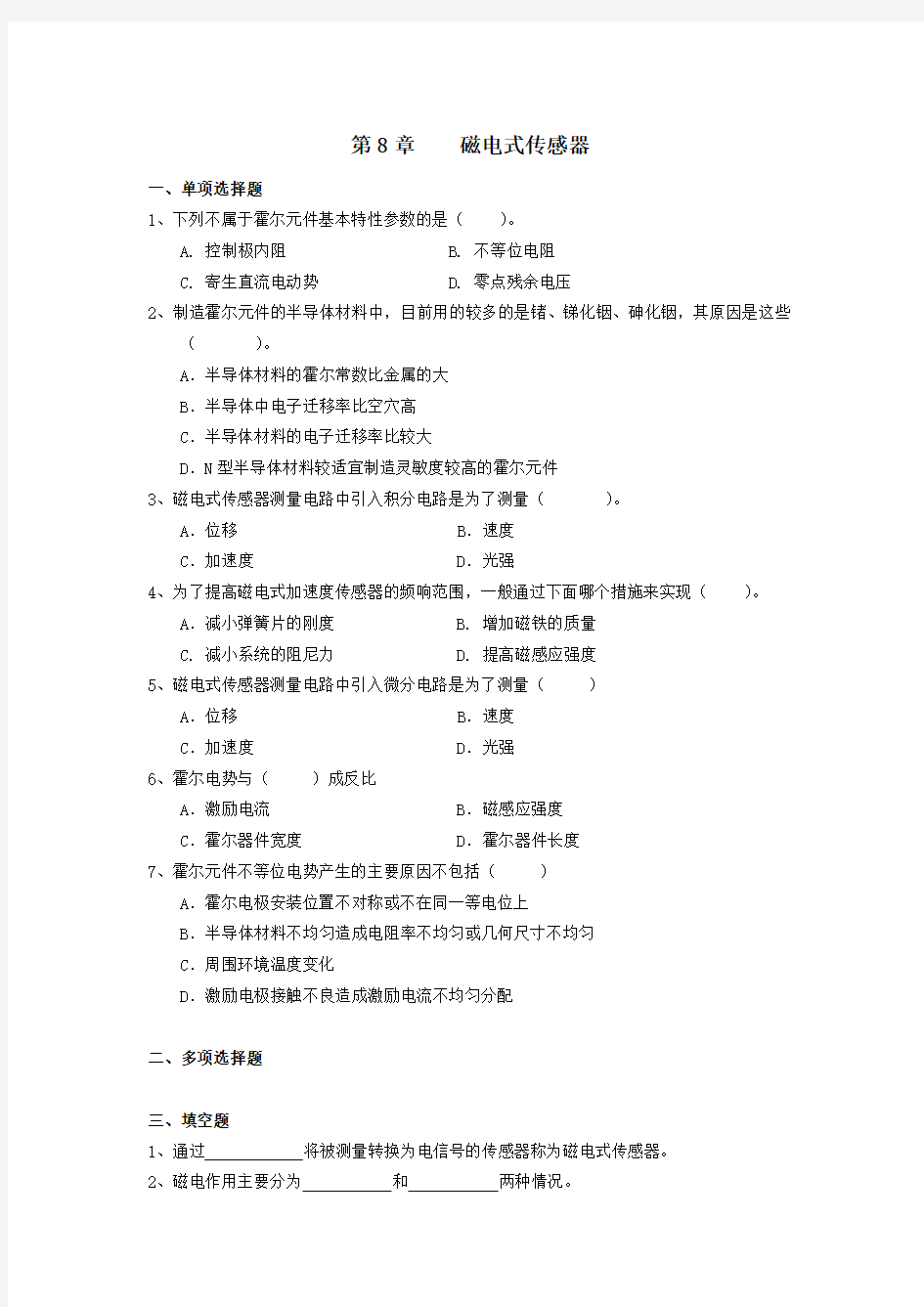
3、根据图(假设控制电流垂直于纸面流进或流出并且恒定),试证明霍尔式位移传感器的输出电势U与位移x成正比关系。除了测量位移外, 霍尔式传感器还有哪些应用?
4、简述霍尔电势产生的原理。
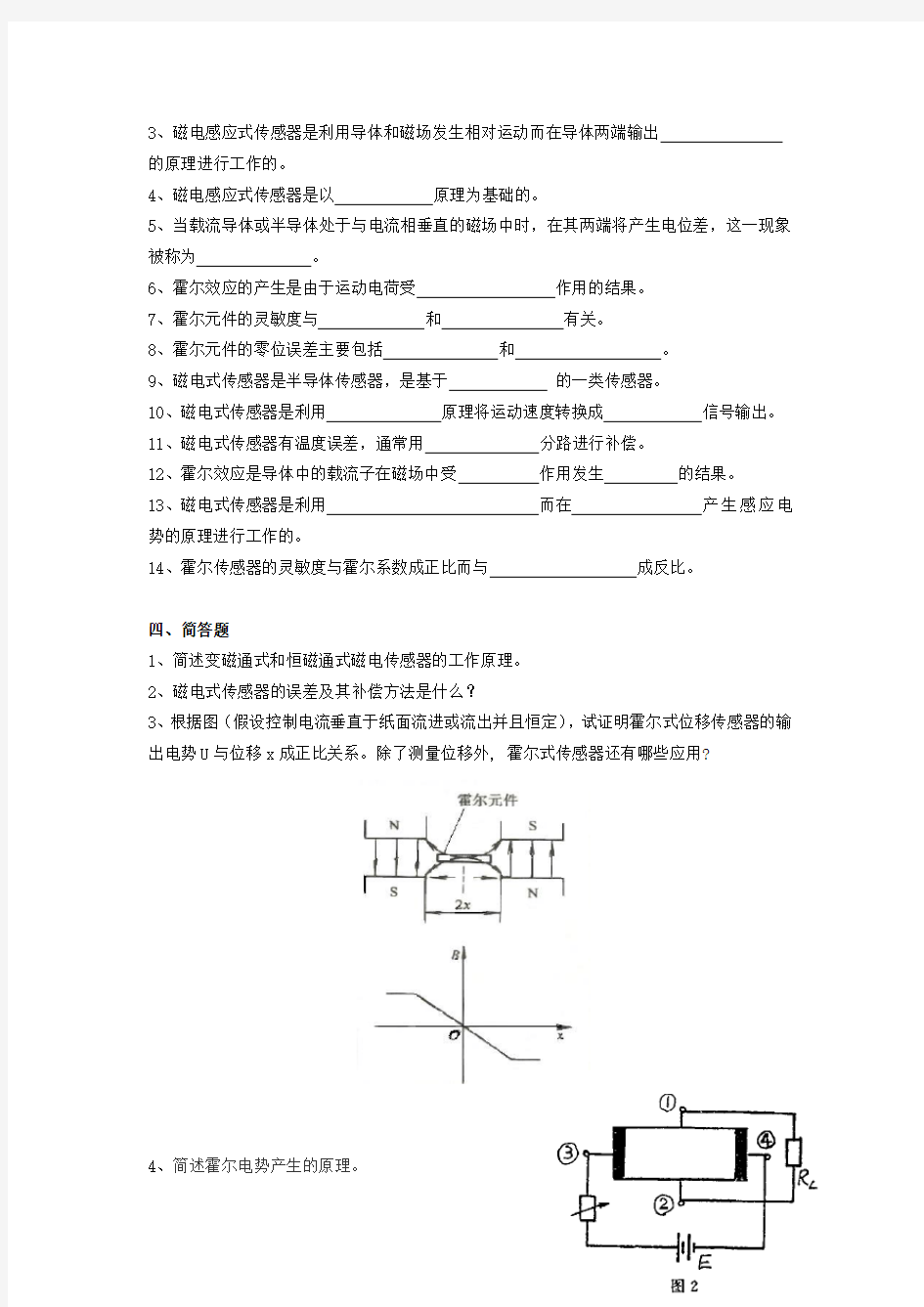
5、A.图2是元件的基本测量电路。
B.图2中各编号名称:
①和②是;
③和④是。
C.图2电路中的被测量是。
6、磁电式传感器与电感式传感器有哪些不同?磁电式传感器主要用于测量哪些物理参数?
7、霍尔元件能够测量哪些物理参数?霍尔元件的不等位电势的概念是什么?温度补偿的方法有哪几种?
8、简述霍尔效应及构成以及霍尔传感器可能的应用场合。
9、试分析差动变压器相敏检测电路的工作原理。
10、分析电感传感器出现非线性的原因,并说明如何改善?
11、磁电式传感器与电感式传感器有哪些不同?磁电式传感器主要用于测量哪些物理参数?
12、霍尔元件能够测量哪些物理参数?霍尔元件的不等位电势的概念是什么?温度补偿的方法有哪几种?
13、什么是霍尔效应?霍尔电势与哪些因素有关?如何提高霍尔传感器的灵敏度?
14、结合下图说明磁电式传感器产生非线性误差的原因?
15、结合下图说明霍尔式微位移传感器是如何实现微位移测量的?
霍尔元件
16、什么是霍尔效应?为什么说只有半导体材料才适于制造霍尔片?
17、解释霍尔元件常制成薄片形状的原因(要求给出必要的公式推导过程)。
18、为什么说磁电感应式传感器是一种有源传感器?
四、计算题
1、某霍尔元件的l,b,d尺寸分别是1.0cm,0.35cm,0.1cm,沿l方向通以电流I=1.0mA,在垂直lb面的方向加有均匀磁场B=0.3T,传感器的灵敏度系数为22V/(A·T),试求其输出霍尔电动势及载流子浓度。
第8章磁电式传感器
一、单项选择题
1、D
2、D
3、A
4、D
5、C
6、D
7、C
二、多项选择题
三、填空题
1、磁电作用
2、电磁感应;霍尔效应
3、感应电动势
4、电磁感应
5、霍尔效应
6、磁场中洛伦兹力
7、元件的厚度;载流子的浓度
8、不等位电势;寄生直流电动势
9、电磁感应 10、电磁感应;电 11、热磁 12、洛伦兹力;运动
13、导体和磁场发生相对运动;导体两端 14、霍尔片厚度
四、简答题
1、答:恒磁通式传感器是指在测量过程中使导体(线圈)位置相对于恒定磁通变化而实现测量的一类磁电感应式传感器。
变磁通式磁电传感器主要是靠改变磁路的磁通大小来进行测量,即通过改变测量磁路中气隙的大小,从而改变磁路的磁阻来实现测量的。
2、答:磁电式传感器的误差主要有非线性误差和温度误差。
非线性误差的主要原因:当磁电式传感器在进行测量时,传感器线圈会有电流流过,这时线圈会产生一定的交变磁通,此交变磁通会叠加在永久磁铁产生的传感器工作磁通上,导致气隙磁通变化。
补偿非线性误差的方法:在传感器中加入补偿线圈,补偿线圈被通以一定的电流,适当选择补偿线圈的参数,使其产生的交变补偿磁通可以与传感器线圈本身产生的交变附加磁通相互抵消。
温度误差产生的原因主要是受温度变化的影响。
温度误差补偿的方法是在结构允许的情况下,在传感器的磁铁下设置热磁分路。
3、答:霍尔式位移传感器输出电动势U H=K H IB。
在一定范围内,B正比于位移x,又霍尔电动势正比于B,所以U H正比于位于x。
除了测量位移外,霍尔式传感器还可以测量转速、压力等。
4、答:一块半导体薄片置于磁感应强度为B的磁场(磁场方向垂直于薄片)中,当有电流I 流过时,电子受到洛仑兹力作用而发生偏转。结果在半导体的后端面上电子有所积累。而前端面缺少电子,因此后端面带负电,前端面带正电,在前后端面形成电场,该电场产生的力阻止电子继续偏转当两力相平衡时,电子积累也平衡,这时在垂直于电流和磁场的方向上将产生电场,相应的电势称为霍尔电势U H。
5、答:A.图2是霍尔元件的基本测量电路。
B.图2中各编号名称:
①和②是霍尔电极;
③和④是激励电极(控制电极)。
C.图2电路中的被测量是磁感应强度。
6、答:
a.磁电式传感器是通过磁电作用将被测量转换为电信号的一种传感器。
电感式传感器是利用线圈自感或互感的变化来测量的一种装置。
b.磁电式传感器具有频响宽、动态范围大的特点。而电感式传感器存在交流零位信号,不宜于高频动态信号检测;其响应速度较慢,也不宜做快速动态测量。
c. 磁电式传感器测量的物理参数有:磁场、电流、位移、压力、振动、转速。
7、答:
a.霍尔元件可测量磁场、电流、位移、压力、振动、转速等。
b.霍尔组件的不等位电势是霍尔组件在额定控制电流作用下,在无外加磁场时,两输出电极之间的空载电势,可用输出的电压表示。
c.温度补偿方法:分流电阻法:适用于恒流源供给控制电流的情况。电桥补偿法
8、答:一块长为l、宽为d的半导体薄片置于磁感应强度为磁场(磁场方向垂直于薄片)中,当有电流I流过时,在垂直于电流和磁场的方向上将产生电动势Uh。这种现象称为霍尔效应。霍尔组件多用N型半导体材料,且比较薄。霍尔式传感器转换效率较低,受温度影响大,但其结构简单、体积小、坚固、频率响应宽、动态范围(输出电势变化)大、无触点,使用寿命长、可靠性高、易微型化和集成电路化,因此在测量技术、自动控制、电磁测量、计算装置以及现代军事技术等领域中得到广泛应用。
9、答:相敏检测电路原理是通过鉴别相位来辨别位移的方向,即差分变压器输出的调幅波经相敏检波后,便能输出既反映位移大小,又反映位移极性的测量信号。经过相敏检波电路,正位移输出正电压,负位移输出负电压,电压值的大小表明位移的大小,电压的正负表明位移的方向。
10、答:A. 原因是改变了空气隙的长度
B. 改善方法是让初始空气隙距离尽量小,同时灵敏度的非线性也将增加,这样的话最好
使用差动式传感器,
20
0002L l l S=1()...l l l ????--++????
其灵敏度增加非线性减少。
11、答:磁电式传感器是通过磁电作用将被测量转换为电信号的一种传感器。
电感式传感器是利用线圈自感或互感的变化来测量的一种装置。
磁电式传感器具有频响宽、动态范围大的特点。而电感式传感器存在交流零位信号,不
宜于高频动态信号检测;其响应速度较慢,也不宜做快速动态测量。
磁电式传感器测量的物理参数有:磁场、电流、位移、压力、振动、转速。
12、答:霍尔组件可测量磁场、电流、位移、压力、振动、转速等。
霍尔组件的不等位电势是霍尔组件在额定控制电流作用下,在无外加磁场时,两输出电
极之间的空载电势,可用输出的电压表示。
温度补偿方法:
a 分流电阻法:适用于恒流源供给控制电流的情况。
b 电桥补偿法
13、答: 当载流导体或半导体处于与电流相垂直的磁场中时,在其两端将产生电位差,这
一现象被称为霍尔效应。 霍尔电势IB K d IB R ned IB -vBb b E U H H H H =====
霍尔电势与霍尔电场E H 、载流导体或半导体的宽度b 、载流导体或半导体的厚度d 、电
子平均运动速度v 、磁场感应强度B 、电流I 有关。 霍尔传感器的灵敏度ned
1d R K H H -==。为了提高霍尔传感器的灵敏度,霍尔元件常制成薄片形状。又霍尔元件的灵敏度与载流子浓度成反比,所以可采用自由电子浓度较低的材料
作霍尔元件。
14、答:传感器线圈内有电流I 流过时,将产生一定的交变磁通φI ,此交变磁通叠加在永
久磁铁所产生的工作磁通上,使恒定的气隙磁通变化:当传感器向上运动时,φI 与φ方向
相反,减弱了工作磁场的作用, 从而使得传感器的灵敏度随着被测速度的增大而降低;当
线圈的运动速度与图所示方向相反时,φI 与φ方向相同,增加了工作磁场的作用,传感器
的灵敏度增大。其结果是线圈运动速度方向不同时,传感器的灵敏度具有不同的数值,使传
感器输出基波能量降低,谐波能量增加
, 即这种非线性特性同时伴随着传感器输出的谐波失真。传感器灵敏度越高,线圈中电流越
大,这种非线性越严重。
15、答:霍尔元件处于中间位置时,同时受到大小相等、方向相反的磁通作用,磁感应强度
B=0, 因此霍尔元件输出的霍尔电势U H =0,位移ΔZ =0。若霍尔元件沿Z 向移动,在两磁
铁中产生相对位移,霍尔元件感受到的磁感应强度0B ≠, 0≠?==z K IB K U H H ,其量
值大小反映出霍尔元件与磁铁之间相对位置的变化量。
所以,霍尔电势U H 与位移量ΔZ 成线性关系,且霍尔电势的极性反映了霍尔片的移动
方向(位移方向)。磁场变化率越大,灵敏度越高,可测1~2mm 的小位移,动态范围达5mm 。
16、答: 置于磁场中的静止载流导体,当它的电流方向与磁场方向不一致时,载流导体上
平行于电流和磁场方向上的两个面之间产生电动势,这种现象称霍尔效应。 霍尔常数R H 等于霍尔片材料的电阻率ρ与电子迁移率μ的乘积,即R H =μρ。若要霍尔效
应强,则希望有较大的霍尔系数R H ,因此要求霍尔片材料有较大的电阻率和载流子迁移率。
一般金属材料载流子迁移率很高,但电阻率很小;而绝缘材料电阻率极高,但载流子迁移率
极低,故只有半导体材料才适于制造霍尔片。
17、答:置于磁场中的静止金属载流体产生霍尔效应时,电子受洛伦兹力:
eBv f L = ①
同时金属导体内形成霍尔电场,电子受与L f 反向的电场力:
e b
U eE f H H H =
= ② 平衡状态下:H L f f =, 即:Bv E H = ③
设金属导体单位体积内电子数为n ,则:nebd I v =
④ 把④代入③:nebd
IB E H = ⑤ 把⑤代入②:IB K d
IB R ned IB U H H H === ⑥ ⑥式中霍尔常数ne R H 1=,灵敏度d
R K H H = 由此可见,霍尔电势正比于激励电流和磁感应强度。其灵敏度H K 正比于霍尔系数
H R (它在金属导体单位体积内电子数固定时为定值),而与霍尔片厚度d 成反比。 ∴ 为了提高灵敏度H K ,霍尔元件常制成薄片形状。
18、答:磁电感应式传感器是利用导体和磁场发生相对运动而在导体两端输出感应电动势的原理进行工作的,它是一种机-电能量变换型传感器,直接从被测物体吸收机械能量并转换成电信号输出,不需提供供电电源,因而属于有源传感器。
五、计算题
1解:3H H U K I B 221.0100.3 6.6mV -=??=???=
3H H U 6.6mV U vBb,vb 2.210V /T B 0.3T
-====? 31932I nevbd,110n 1.610 2.2100.110----=?=??????
203n 2.8410/m =?
(注:专业文档是经验性极强的领域,无法思考和涵盖全面,素材和资料部分来自网络,供参考。可复制、编制,期待你的好评与关注)