PID 控制算法的 matlab 仿真
PID 控制算法是实际工业控制中应用最为广泛的控制算法,它具有控制器设
计简单,控制效果好等优点。 PID 控制器参数的设置是否合适对其控制效果具有很
大的影响,在本课程设计中一具有较大惯性时间常数和纯滞后的一阶惯性环节作为
被控对象的模型对 PID 控制算法进行研究。被控对象的传递函数如下:
G(s)
Ke d s
1 T f s
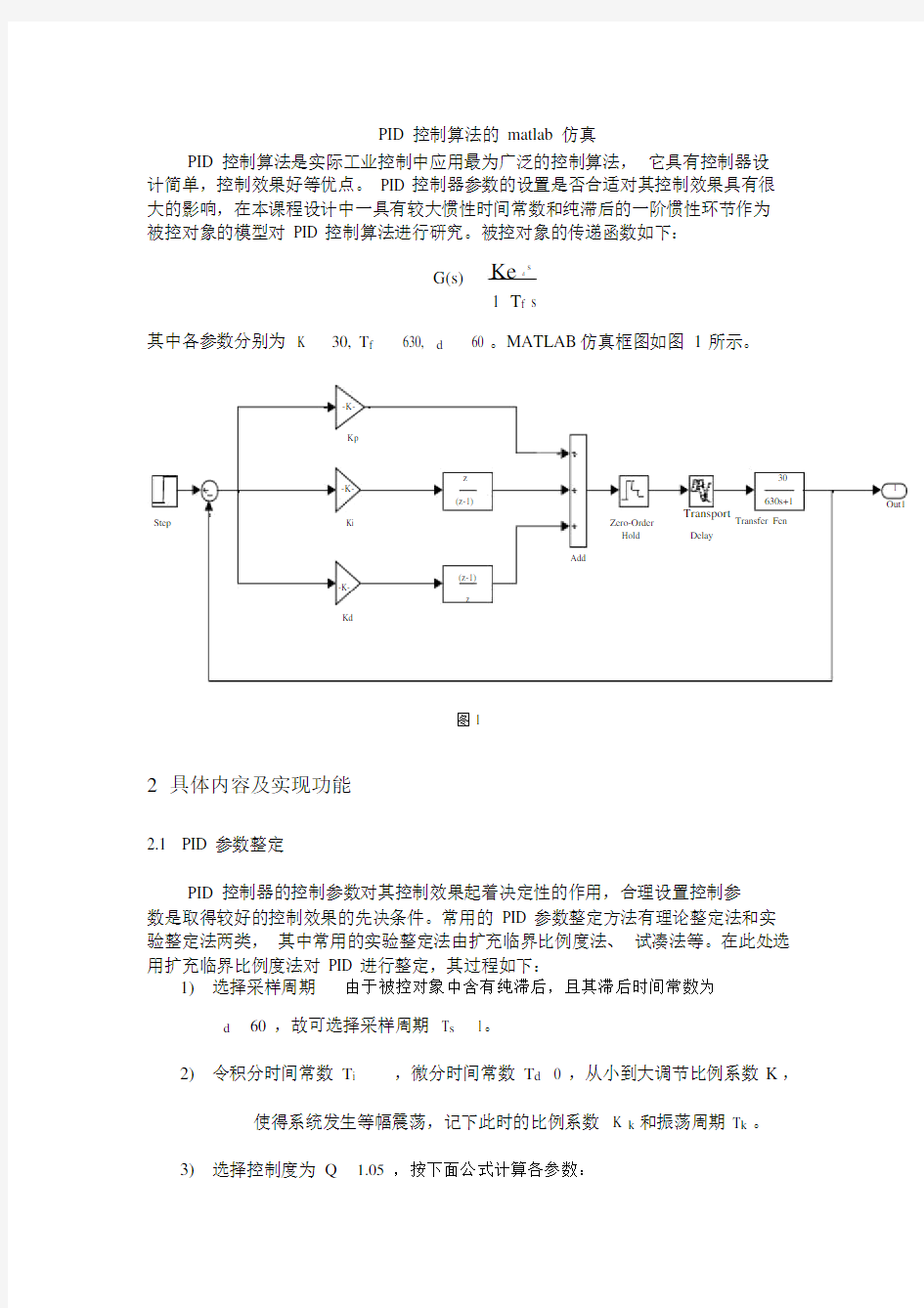
其中各参数分别为 K 30, T f 630, d 60 。MATLAB仿真框图如图1所示。
-K-
Kp
z 30
-K-
(z-1) 630s+1
Step Ki Zero-Order Transport
Transfer Fcn
Hold Delay
Add
(z-1)
-K-
z
Kd
图 1
2具体内容及实现功能
2.1 PID 参数整定
PID 控制器的控制参数对其控制效果起着决定性的作用,合理设置控制参
数是取得较好的控制效果的先决条件。常用的 PID 参数整定方法有理论整定法和实
验整定法两类,其中常用的实验整定法由扩充临界比例度法、试凑法等。在此处选用扩充临界比例度法对 PID 进行整定,其过程如下:
1)选择采样周期由于被控对象中含有纯滞后,且其滞后时间常数为
d60 ,故可选择采样周期 T s 1。
2)令积分时间常数T i,微分时间常数T d0 ,从小到大调节比例系数K ,
使得系统发生等幅震荡,记下此时的比例系数K k和振荡周期 T k。
1 Out1
3)选择控制度为Q 1.05 ,按下面公式计算各参数:
K p 0.63K k T i 0.49T k T d 0.14T k T s 0.014T k
通过仿真可得在 T s 1时, K
k 0.567, T k 233 ,故可得:
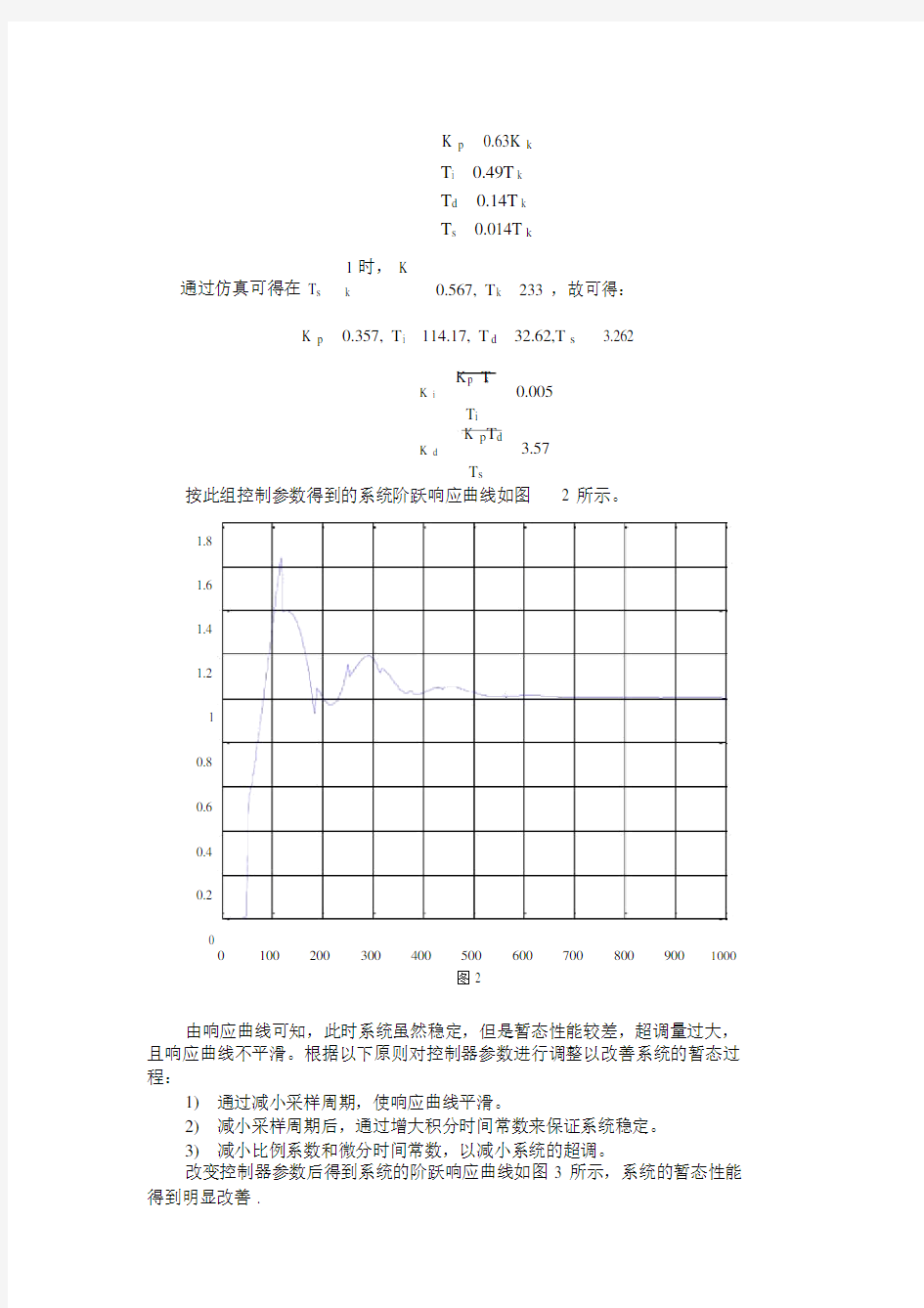
K p 0.357, T i 114.17, T d 32.62,T s 3.262
K p T s
0.005
K i
T i
K p T d
3.57
K d
T s
按此组控制参数得到的系统阶跃响应曲线如图 2 所示。
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
01002003004005006007008009001000
图 2
由响应曲线可知,此时系统虽然稳定,但是暂态性能较差,超调量过大,且响应曲线不平滑。根据以下原则对控制器参数进行调整以改善系统的暂态过程:
1)通过减小采样周期,使响应曲线平滑。
2)减小采样周期后,通过增大积分时间常数来保证系统稳定。
3)减小比例系数和微分时间常数,以减小系统的超调。
改变控制器参数后得到系统的阶跃响应曲线如图3 所示,系统的暂态性能得到明显改善 .
1.4
1.2
1
0.8
0.6
0.4
0.2
01002003004005006007008009001000
图 3
最终,选择采样周期为T s1,PID控制器的控制参数为:
K p0.25, K i0.001, K d 3
此时,系统的超调量为M p27.7% ,上升时间为t r135 ,调整时间为t s445 。稳态误差为 e ss0 。
2.2 模型失配对 PID 控制器控制效果的影响
实际中,由于建模误差以及被控对象的参数变化,都会使得被控对象传递函数参数不准确。一个性能优良的控制器应该在系统参数发生变化时依然具有良好的控
制性能,既具有较强的鲁棒性。 PID 控制器的鲁棒性强弱是由控制器参数确定后系
统的稳定裕度决定的。下面通过仿真分析被控对象参数变化时 PID 控制器的控制效果。
当被控对象的比例系数增大 5% 时,系统的单位阶跃响应曲线如图 4 所示,此时系统的个暂态性能指标为:
M p29.9%, t r 129, t s410
相对参数未变时单位阶跃响应而言,系统的超调量增大,上升时间和调整时间都减小,但是,各性能指标的变化量都比较小。这是因为,被控对象的比例系
数增大使得系统的开环增益变大,故而系统响应的快速性得到提高,但超调量也
随之增大。从被控对象的比例系数变化时系统的单位阶跃响应可知,当被控对象的比例系数在一定范围内变化时,对 PID 控制器的控制效果不会产生太大影响。
1.4
参数改变
参数不变
1.2
1
0.8
0.6
0.4
0.2
01002003004005006007008009001000
图 4
当被控对象的惯性时间常数增大5%
时,系统的单位阶跃响应曲线如图 5 所
示,此时系统的个暂态性能指标为:
M p26.4%, t r 175, t s475
1.4
参数不变
参数改变
1.2
1
0.8
0.6
0.4
0.2
01002003004005006007008009001000
图 5
相对参数未变时单位阶跃响应而言,被控对象的惯性时间常数增大使得系统的响应速度变慢,故而,使得系统的超调量减小,上升时间和调整时间都增大。
又各性能指标的变化量都比较小,故可知,当被控对象的惯性时间常数在一定范
围内变化时,对 PID 控制器的控制效果不会产生太大影响。
当被控对象的纯滞后时间常数增大 5% 时,系统的单位阶跃响应曲线如图 6 所示,此时系统的个暂态性能指标为:
M p31.5%, t r135, t s415
1.4
参数改变
参数不变
1.2
1
0.8
0.6
0.4
0.2
01002003004005006007008009001000
图 6
2.3非线性对PID控制器控制效果的影响
0.25
z 30
0.001
(z-1) 630s+1 Step Saturation Zero-Order Transport Transfer Fcn Scope
Hold Delay
Add
(z-1)
3
z
图 7
实际的控制系统中往往存在非线性,如执行机构的非线性。系统的非线性将
会对控制器的控制效果产生影响,下面通过仿真研究非线性对PID 控制器控制效
果的影响。
在原控制系统仿真框图中控制器输出后加饱和非线性环节,得到图 7 所示的
框图。在保持其它参数不变的情况下得到其阶跃响应曲线如图 8 所示。从响应曲线
可知,加入非线性环节后,系统的超调量、上升时间、调整时间均增大,控制
效果变坏。
1.4
不含非线性
含非线性
1.2
1
0.8
0.6
0.4
0.2
01002003004005006007008009001000
图 8
2.4 扰动对 PID 控制器控制效果的影响
实际的控制系统中,被控对象和检测通道往往会受到多种因素的影响,从而对控制效果产生影响,下面分别以加在前向通道和反馈通道上的脉冲扰动和阶跃扰动为例探讨扰动对控制系统的影响。
1)前向通道上的扰动对控制效果的影响:
在前向通道上控制器输出之后加脉冲扰动和阶跃扰动信号时系统的响应曲
线分别如图 9 和图 10 所示。由响应曲线可知,系统达到稳态后,前向通道上的
扰动信号将使得控制系统的输出产生波动,但通过控制器的作用,控制系统经过
一个过渡过程后将会恢复原来的稳定状态。
1.4
加阶跃扰动时响应曲线
不加扰动时响应曲线
1.2
1
0.8
0.6
0.4
0.2
01002003004005006007008009001000
图 9
1.4
加脉冲扰动时响应曲线
不加扰动时响应曲线
1.2
1
0.8
0.6
0.4
0.2
02004006008001000
图 10
2)反馈通道上的扰动对控制效果的影响:
在反馈通道上加脉冲扰动和阶跃扰动信号时,控制系统的响应曲线分别如
图 11 和图 12 所示 . 由响应曲线可知,控制系统输出随着反馈通道上的扰动变化而变化,且由反馈通道上的扰动引起的误差不能被消除。但是当扰动消失时,控制系统也恢复原来的稳定状态。
1.4
加脉冲扰动时响应曲线
不加扰动时的响应曲线
1.2
1
0.8
0.6
0.4
0.2
01002003004005006007008009001000
图 11
1.4
加阶跃扰动时响应曲线
不加扰动时响应曲线
1.2
1
0.8
0.6
0.4
0.2
01002003004005006007008009001000
图 12
3分析与总结