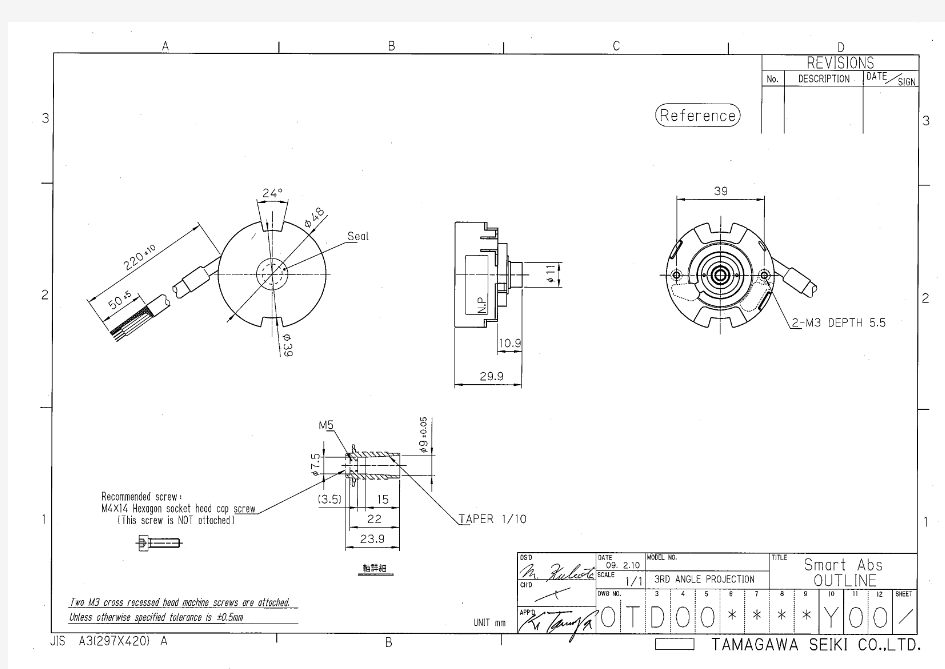
2013.7 多摩川编码器总结 一、摘要 基于CPLD 和DSP 实现CPLD 与多摩川编码器的通讯,通过对编码器发送请求,得到编码器发回的数据并进行解码,得到绝对位置值。 二、学习步骤: 1、熟悉工作环境,掌握Modelsim 以及Quartus 的使用。 2、阅读多摩川编码器的通讯协议。 3、根据协议编写testbench ,并在Modelsim 上进行仿真调试。 4、仿真通过后,通过Quartus 编译后下载到CPLD 上并与编码器通讯,实际情况下运行。 5、完成各项要求的功能。 6、对代码进行优化,尽可能减少资源占用。 7、验收。 三、总体结构 双绞线,差分式,串行 地址/数据总线接口 RO,DI,DIR逻辑信号 结构分三部分:多摩川编码器,CPLD ,DSP 。 1、编码器跟CPLD 之间通过MAX485电平转换进行连接。 2、CPLD 与DSP 则通过总线进行连接(这一部分结构编写学长已经完成并且提供了端口连接) 3、主要工作是CPLD 的解码部分。 四、通讯协议 1、TS5668的技术指标:(物理层) 精度:单圈精度: 17位(131 072) 多圈精度: 16位(65 536) 最高转速/ ( r ·min - 1 ): 6 000】 输出:差分NRZ 编码二进制 传输速度/Mbp s : 2. 5 发送、接收电路:差分形式 通信方式:主从模式 接口:3FG ,4sig+ ,5sig -,7VCC ,8DGND 。4和5为差分信号接口。 2、通信步骤如下图:(逻辑链路层) 1)CPLD 向编码器发送一个控制字CF 2)3us 后编码器返回数据包。 3)CPLD 对数据包进行解码,并将得到的数据放在总线上,等待DSP 获取。 具体流程如下图:
曳引机使用说明书 安全可靠人性创新 永磁同步无齿轮曳引机 MTA50000AB
序言 感谢您使用该系列永磁同步无齿轮曳引机产品! 永磁同步电机技术作为一种电动机新技术应用于电梯曳引机领域开始于二十世纪九十年代,它带来了一次电梯公司形式上的革命。该系列永磁同步无齿轮曳引机采用盘式制动器、内转子型式。 本公司研发的永磁同步无齿轮曳引机的各项指标设计均符合国家相关规定,每台曳引机出厂前都经过严格的质量检验,对制动力、绝缘耐压、振动、噪音等各项指标进行了全面的检测,从而保证产品的质量和性能符合标准规定。 此手册为产品的一部分,旨在为用户正确使用无齿轮曳引机并提供曳引机安装、保养方面的指导,请务必妥善保管于安全的地方,以方便服务人员使用。在对机器进行安装、调试、使用、维修前,请务必阅读并理解此手册的内容。对不按此手册或不按我公司工程人员指导进行违规操作所产生的所有后果,我公司有权不予承担。 我公司拥有对本手册及其所包含信息的所有权,并有权对手册内容进行版本更新,而不另行通知。 严禁任何单位和个人,不经本公司同意复制部分或全部内容,用于同行业产品的说明和介绍。
目录 序言 一安全 ........................................................................................................ - 1 -二产品说明 ................................................................................................ - 1 -2.1曳引机介绍 (1) 2.2曳引机工作条件 (1) 2.3防护等级 (1) 2.4产品型号 (2) 2.5外形安装尺寸 (2) 2.6备件 (3) 三运输、仓储及吊装 ................................................................................. - 3 -四安装 ........................................................................................................ - 4 -4.1使用前检查 (4) 4.2安装注意事项 (4) 4.3远程松闸手动装置的安装及使用说明 (4) 4.3.1 安装 ................................................................................................ - 4 - 4.3.2 使用说明 ........................................................................................ - 5 -
陀螺仪: 可应用于航空、航天、航海、兵器、汽车、生物医学、环境监控等领域。 1、体积小、重量轻。适合于对安装空间和重量要求苛刻的场合,例如弹载测量等。 2、低成本。 3、高可靠性。内部无转动部件,全固态装置,抗大过载冲击,工作寿命长。 4、低功耗。 5、大量程。适于高转速大g值的场合。 6、易于数字化、智能化。可数字输出,温度补偿,零位校正等。 测速发电机: 输出电动势与转速成比例的微特电机。测速发电机的绕组和磁路经精确设计,其输出电动势 E 和转速 n 成线性关系,即 E=Kn,K 是常数。改变旋转方向时输出电动势的极性即相应改变。在被测机构与测速发电机同轴联接时,只要检测出输出电动势,就能获得被测机构的转速,故又称速度传感器。 测速发电机广泛用于各种速度或位置控制系统。在自动控制系统中作为检测速度的元件,以调节电动机转速或通过反馈来提高系统稳定性和精度;在解算装置中可作为微分、积分元件,也可作为加速或延迟信号用或用来测量各种运动机械在摆动或转动以及直线运动时的速度。 电子凸轮: 利用角度位置传感器来模拟机械凸轮各控制点的角度范围,并能独立输出各自的控制信号,此种设备称为电子凸轮,包含“机械凸轮+微动开关”的基本功能。 ?可以输出多路控制开关量(ON/OFF),且每路都可以独立预设起始、终止角度。 ?可以动态检测和显示实际运行角度,对设备运行和再调整实时检测。 ?可以随时修改预设角度,且每一路均有 LED 状态指示,“开态”点亮,“关态”熄灭。 ?各路输出信号在电气上相互隔离,抗干扰能力强,可靠性高。 ?动作精度可达到1°typical 轨迹球: 外型尺寸:1、1.4、2、3英寸 输出方式:PS2、USB、方波、脉冲输出
ROTARY ENCODERS FA-CODER ? OIH35
ROTARY ENCODERS to high resolution are available to meet all of the requirements. High performance encoders supported by these high disk pro- ducing techniques are available. FA-CODER ?
Super-precision angle index device HISTORY OF ENCODER DEVELOPMENT AT TAMAGAWA SEIKI SPECIFICATION LIST (INCREMENTAL) SPECIFICATION LIST (ABSOLUTE) INDIVIDUAL SPECIFICATION (INCREMENTAL) INDIVIDUAL SPECIFICATION (ABSOLUTE) NOTICE IN TRANSMITTING TRANSMITTING DISTANCE HOW TO USE ENCODER CONTROL SIGNAL CONVERSION TIME NOTICE IN HANDLING MOUNTING WAY DEFINITIONS COUPLING SPECIFICATION MOUNTING PLATE ANGLE CONVERSION LIST I N D E X 2
1970 S45 1975 S50 1980 S55 1985 S60 3 100 3,600C/T 12bit 17bit HISTORY OF ENCODER DEV (for steel) TS5146 5,000C/T TS5410 Series 90k 480k C/T 19bit
2013.7 多摩川编码器总结 一、摘要 基于CPLD 和DSP 实现CPLD 与多摩川编码器的通讯,通过对编码器发送请求,得到编码器发回的数据并进行解码,得到绝对位置值。 二、学习步骤: 1、熟悉工作环境,掌握Modelsim 以及Quartus 的使用。 2、阅读多摩川编码器的通讯协议。 3、根据协议编写testbench ,并在Modelsim 上进行仿真调试。 4、仿真通过后,通过Quartus 编译后下载到CPLD 上并与编码器通讯,实际情况下运行。 5、完成各项要求的功能。 6、对代码进行优化,尽可能减少资源占用。 7、验收。 三、总体结构 双绞线,差分式,串行 地址/数据总线接口RO,DI,DIR逻辑信号结构分三部分:多摩川编码器,CPLD ,DSP 。 1、编码器跟CPLD 之间通过MAX485电平转换进行连接。 2、CPLD 与DSP 则通过总线进行连接(这一部分结构编写学长已经完成并且提供了端口连接) 3、主要工作是CPLD 的解码部分。 四、通讯协议 1、TS5668的技术指标:(物理层) 精度:单圈精度: 17位(131 072) 多圈精度: 16位(65 536) 最高转速/ ( r ·min - 1 ): 6 000】 输出:差分NRZ 编码二进制 传输速度/Mbp s : 2. 5 发送、接收电路:差分形式 通信方式:主从模式 接口:3FG ,4sig+ ,5sig-,7VCC ,8DGND 。4和5为差分信号接口。 2、通信步骤如下图:(逻辑链路层) 1)CPLD 向编码器发送一个控制字CF 2)3us 后编码器返回数据包。 3)CPLD 对数据包进行解码,并将得到的数据放在总线上,等待DSP 获取。 具体流程如下图:
2013.7多摩川编码器总结 一、摘要 基于CPLD 和DSP 实现CPLD 与多摩川编码器的通讯,通过对编码器发送请求,得到 编码器发回的数据并进行解码,得到绝对位置值。 二、学习步骤: 1、 熟悉工作环境,掌握 Modelsim 以及Quartus 的使用。 2、 阅读多摩川编码器的通讯协议。 3、 根据协议编写testbench ,并在Modelsim 上进行仿真调试。 4、 仿真通过后,通过 Quartus 编译后下载到 CPLD 上并与编码器通讯,实际情况下运 行。 5、 完成各项要求的功能。 6、 对代码进行优化,尽可能减少资源占用。 7、 验收。 三、总体结构 结构分三部分:多摩川编码器, CPLD ,DSP 。 1、 编码器跟CPLD 之间通过MAX485电平转换进行连接。 2、 C PLD 与DSP 则通过总线进行连接(这一部分结构编写学长已经完成并且提供了端 口连接) 3、 主要工作是 CPLD 的解码部分。 四、通讯协议 1、 TS5668的技术指标:(物理层) 精度:单圈精度:17位(131 072) 多圈精度:16位(65 536) 最高转速/ ( r ? min - 1 ) : 6 000】 输出:差分NRZ 编码二进制 传输速度/Mbp s : 2. 5 发送、接收电路:差分形式 通信方式:主从模式 接口: 3FG , 4sig+ , 5sig-, 7VCC , 8DGND 。4 和 5 为差分信号接口。 2、 通信步骤如下图:(逻辑链路层) 1) CPLD 向编码器发送一个控制字 CF 2) 3us 后编码器返回数据包。 3) CPLD 对数据包进 行解码,并将得到的数据放在总线上,等待 DSP 获取。 具体流 程如下图: RO DI ,DIR 逻辑信号 MAX48电平转 换接口 CPL 解码 地址/数据总线接口 双绞线,差分式,串行 1/