Model Predictive Control Toolbox——设计和仿真模型预测控制器
- 格式:doc
- 大小:213.00 KB
- 文档页数:7
MATLAB目录MATLAB的简介发展历程应用Matlab的优势和特点Matlab常用工具箱常用函数[编辑本段]MATLAB的简介MATLAB 是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLA B和Simulink两大部分。
MATLAB是矩阵实验室(Matrix Laboratory)的简称,和Mathematica、Mapl e并称为三大数学软件。
它在数学类科技应用软件中在数值计算方面首屈一指。
MAT LAB可以进行矩阵运算、绘制函数和数据、实现算法、创建用户界面、连接其他编程语言的程序等,主要应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。
MATLAB的基本数据单位是矩阵,它的指令表达式与数学、工程中常用的形式十分相似,故用MATLAB来解算问题要比用C,FORTRAN等语言完相同的事情简捷得多,并且mathwork也吸收了像Maple等软件的优点,使MATLAB成为一个强大的数学软件。
在新的版本中也加入了对C,FORTRAN,C++ ,JAVA的支持。
可以直接调用,用户也可以将自己编写的实用程序导入到MATLAB函数库中方便自己以后调用,此外许多的MATLAB爱好者都编写了一些经典的程序,用户可以直接进行下载就可以用。
[编辑本段]发展历程20世纪70年代,美国新墨西哥大学计算机科学系主任Cleve Moler为了减轻学生编程的负担,用FORTRAN编写了最早的MATLAB。
1984年由Little、Moler、St eve Bangert合作成立了的MathWorks公司正式把MATLAB推向市场。
到20世纪9 0年代,MATLAB已成为国际控制界的标准计算软件。
版本更新[编辑本段]应用MATLAB 产品族可以用来进行以下各种工作:● 数值分析● 数值和符号计算● 工程与科学绘图● 控制系统的设计与仿真● 数字图像处理● 数字信号处理● 通讯系统设计与仿真● 财务与金融工程MATLAB 的应用范围非常广,包括信号和图像处理、通讯、控制系统设计、测试和测量、财务建模和分析以及计算生物学等众多应用领域。
MATLAB7.1中文翻译MATLAB MATLAB 主程序模块Simulink 动态仿真模块Aerospace Blockset 航空模块集Bioinformatics Toolbox 生物信息学工具箱CDMA Reference Blockset CDMA 参考模块集Communications Blockset 通信模块集Communications Toolbox 通信工具箱Control System Toolbox 控制系统工具箱Curve Fitting Toolbox 曲线拟合工具箱DSP Blockset 数字信号模块集Data Acquisition Toolbox 数据采集工具箱Database Toolbox 数据库工具箱Datafeed Toolbox 数据反馈工具箱Distributed Computing Toolbox 分布式计算工具箱Dials and Gauges Blockset 刻度标尺模块集Embedded Target for Motorola MPC 555 摩托罗拉MPC555 嵌入对象Embedded Target for the TI C2000 DSP TI C2000 DSP嵌入对象Embedded Target for TI 6000 DSP TI 6000数字信号处理嵌入对象Embedded Target for Infineon C166 Microcontrollers Infineon C166 微控制器嵌入对象Embedded Target for Motorola? HC12 Motorola? HC12嵌入对象Embedded Target for OSEK/VDX? OSEK/VDX?嵌入对象Excel Link Excel 连接Extended Symbolic Math 扩展符号数学库Filter Design Toolbox 滤波器设计工具箱Filter Design HDL Coder 滤波器设计硬件描述语言编码器Financial Derivatives Toolbox 金融预测工具箱Financial Time Series Toolbox 金融时间系列工具箱Financial Toolbox 金融系统工具箱Fixed-Income Toolbox 定点收益工具箱Fixed-Point Blockset 定点模块集Fuzzy Logic Toolbox 模糊逻辑工具箱GARCH Toolbox GARCH 工具箱Genetic Algorithm and Direct Search Toolbox 遗传算法和直接搜寻工具箱Gauges Blockset Gauges模块集Image Processing Toolbox 图像处理工具箱Image Acquisition Toolbox 图像调节工具箱Instrument Control Toolbox 设备控制工具箱LMI Control Toolbox LMI 控制工具箱MATLAB Com Builder MATLAB COM 文件编辑器MATLAB Compiler MATLAB 编译器MATLAB Excel Builder MATLAB 外部编辑器MATLAB Link for code composer studio MATLAB 与代码设计工作室的连接MATLAB Link for ModelSim MATLAB与ModelSim的连接MATLAB Report Generator MATLAB 报告生成器MATLAB Runtime Server MATLAB 运行时间服务器MATLAB Webs Server MATLAB 支持Web 服务器MATLAB? Distributed Computing Engine MATLAB? 分布式计算引擎Mapping Toolbox 地图工具箱Model Predictive Control Toolbox 模型预测控制工具箱Model-Based Calibration Toolbox 基于模型标准工具箱Mu-Analysis and Synthesis ToolboxMU 分析与合成工具箱Neural Network Toolbox 神经网络工具箱Nonlinear Control Design Blockset 非线性控制设计模块集OPC Toolbox OPC工具箱Optimization Toolbox 优化工具箱Partial Differential Equation Toolbox 偏微分方程工具箱Real-Time Windows Target 实时视窗对象Real-Time Workshop 实时工作室Real-Time Workshop Embedded Coder 实时工作室内嵌编码器Requirements Management Interface 需求管理界面Robust Control Toolbox 强(鲁棒)控制工具箱RF Toolbox RF工具箱SB2SL(converts models to Simulink) 模型转换成Simulink工具Signal Processing Toolbox 信号处理工具箱Signal Processing Blockset 信号处理模块集Sim Driveline SIM动力传动系统Sim Mechanics SIM机械学Sim Power Systems SIM电力系统Simulink Performance ToolsSimulink 执行工具箱Simulink Report Generator Simulink 报表生成器Simulink Verification and Validation Simulink 核实与验证Simulink Response Optimization Simulink响应优化Simulink Parameter Estimation Simulink 参数估计Simulink Fixed Point Simulink不动点Simulink Control Design Simulink控制设计Simulink Accelerator Simulink加速器Spline Toolbox 样条工具箱Stateflow 状态流Stateflow Coder 状态流编码器Statistics Toolbox 统计工具箱Symbolic Math Toolbox 符号数学工具箱System Identification Toolbox 系统识别工具箱Virtual Reality Toolbox 虚拟现实工具箱Video and Image Processing Blockset 视频和图像处理模块集Wavelet Toolbox 小波分析工具箱xPC Target XPC对象xPC Target Embedded Option XPC对象内嵌属性。
MATLAB 主要工具箱简介1.控制系统工具箱控制领域的计算机辅助设计自产生以来就一直受到控制界的重视。
而MATLAB 正是控制领域进行计算及辅助设计的一种非常好的工具语言。
MATLAB 的控制系统工具箱(Control System Toolbox)为用户提供了许多控制领域的专用函数,实际上,这个工具箱就是一个关于控制系统的算法的集合。
通过使用这些专用函数,月户可以方便地实现控制系统的部分应用。
此外,使用MATLAB 的控制系统工具箱还可以方便地进行模型间的转换。
下面列出了该工具箱在控制领域的主要应用:(1)连续系统设计和离散系统设计;(2)传递函数和状态空间;(3)模型转换;(4)频域响应;(5)时域响应;(6)根轨迹和极点配置。
2.小波工具箱小波工具箱(Wavelet Toolbox)在信号处理领域的主要应用包括:(1)基于小波的分析和综合;(2)图形界面和命令行接口;(3)连续和离散小波变换及小波包;(4)一维、二维小波;(5)自适应去噪和压缩。
3.模糊逻辑工具箱模糊逻辑工具箱(FuzzyLogicToolbox)是MATLAB 用于解决模糊逻辑问题的工具箱。
其主要应用包括:(1)友好的交互设计界面;(2)自适应神经——模糊学习、聚类以及Sugeno 推理;(3)支持SIMULINK 动态仿真;(4)可生成C 语言源代码用于实时应用。
4.神经网络工具箱神经网络工具箱(NeuralNetworkToolbox)的主要应用包括:(1)BP 网络;(2)Hopfield,Kohonen 网络:(3)径向基函数网络:(4)竞争、线性、Sigmoidal 等传递函数;(5)前馈、递归等网络结构;(6)性能分析及应用;(7)感知器:(8)自组织网络。
5.通信工具箱通信工具箱(Communication Toolbox)提供了100 多个函数和150 多个SIMULINK 模块用于通信系统的仿真和分析,其主要应用包括:(1)信号编码;(2)调制解调;(3)滤波器和均衡器设计;(4)通道模型;(5)同步:(6)多路访问;(7)错误控制编码。
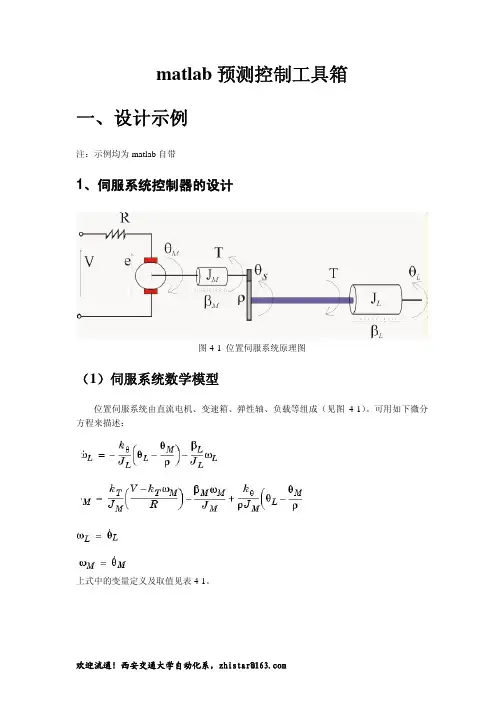
matlab预测控制工具箱一、设计示例注:示例均为matlab自带1、伺服系统控制器的设计图4-1 位置伺服系统原理图(1)伺服系统数学模型位置伺服系统由直流电机、变速箱、弹性轴、负载等组成(见图4-1)。
可用如下微分方程来描述:上式中的变量定义及取值见表4-1。
将上述微分方程写成状态方程形式,有其中,。
(2)控制目标及约束控制目标:在电压V的控制下,使过载角位置跟踪指定值。
输出量仅有可观测。
弹性轴承受的强度有一定的限制,因此对输出力矩T的赋值作一定约束:对输入电压的约束:该系统有一个输入V,两个输出:(可测量)和T(不可测量)。
(3)在matlab中定义该系统的状态空间模型首先需要在matlab中对系统的数学模型进行定义。
可以直接在命令行输入mpcmotormodel(建议做法),也可以在命令行中输入下列命令:% DC-motor with elastic shaft%%Parameters (MKS)%-----------------------------------------------------------Lshaft=1.0; %Shaft lengthdshaft=0.02; %Shaft diametershaftrho=7850; %Shaft specific weight (Carbon steel)G=81500*1e6; %Modulus of rigiditytauam=50*1e6; %Shear strengthMmotor=100; %Rotor massRmotor=.1; %Rotor radiusJmotor=.5*Mmotor*Rmotor^2; %Rotor axial moment of inertia Bmotor=0.1; %Rotor viscous friction coefficient (A CASO)R=20; %Resistance of armatureKt=10; %Motor constantgear=20; %Gear ratioJload=50*Jmotor; %Load inertiaBload=25; %Load viscous friction coefficientIp=pi/32*dshaft^4; %Polar momentum of shaft(circular) sectionKth=G*Ip/Lshaft; %Torsional rigidity(Torque/angle)Vshaft=pi*(dshaft^2)/4*Lshaft; %Shaft volumeMshaft=shaftrho*Vshaft; %Shaft massJshaft=Mshaft*.5*(dshaft^2/4); %Shaft moment of inertiaJM=Jmotor;JL=Jload+Jshaft;Vmax=tauam*pi*dshaft^3/16; %Maximum admissible torqueVmin=-Vmax;%Input/State/Output continuous time form%----------------------------------------------------------AA=[0 1 0 0;-Kth/JL -Bload/JL Kth/(gear*JL) 0;0 0 0 1;Kth/(JM*gear) 0 -Kth/(JM*gear^2)-(Bmotor+Kt^2/R)/JM];BB=[0;0;0;Kt/(R*JM)];Hyd=[1 0 0 0];Hvd=[Kth 0 -Kth/gear 0];Dyd=0;Dvd=0;% Define the LTI state-space modelsys=ss(AA,BB,[Hyd;Hvd],[Dyd;Dvd]);(4)利用MPCTOOL界面设计控制器第一步:导入模型在命令行窗口中输入mpctool,工具箱界面出来后点击Imort Plant…,此时界面如4-2所示。
shell重油裂解问题 dmc仿真 matlab重油是一种具有高分子量和复杂化学成分的石油产品,其加工和利用具有一定的困难性。
为了更高效地利用重油,重油裂解工艺被广泛应用。
而DMC(Dynamic Matrix Control)是一种常用的先进控制技术,通过控制系统动态性能变化来实现对过程的优化控制。
本文将介绍重油裂解工艺的原理和问题,并借助DMC在Matlab中进行仿真,探讨其应用与效果。
重油裂解工艺是将重油加热至高温并加入催化剂,以破坏重油中的分子键,从而产生较低分子量的化合物。
裂解反应主要分为热裂解和催化裂解两种方式,其中催化裂解是更常用和效果更好的一种,可以通过调控催化剂种类和反应条件来控制裂解产物的组成和产量。
重油裂解过程中会产生大量的中间产物,因此需要一个高效且精确的控制系统来稳定和优化裂解过程。
DMC是一种基于模型的先进控制技术,通过对系统建立数学模型,并根据模型预测和修正系统响应,达到优化控制系统的目的。
DMC控制系统的关键是建立准确的数学模型,而对于重油裂解过程,模型可以通过实验数据或者化学反应动力学来构建。
在Matlab中,可以使用系统辨识工具箱(System Identification Toolbox)对实验数据进行处理和建模,也可以使用反应动力学模型方程进行建模。
建立好的模型可以通过系统辨识工具箱进行训练和验证,以获得准确的模型参数。
在进行DMC仿真时,需要确定控制系统的目标和优化指标。
对于重油裂解工艺,目标可能包括稳定产物质量和产量、最小化催化剂消耗和能源消耗等。
优化指标可以通过目标函数来体现,例如多目标优化或者加权优化。
接下来,需要在Matlab中编写DMC控制系统的代码,并根据建立好的数学模型进行优化。
代码中需要定义控制问题的参数、约束条件、模型参数等,然后使用DMC控制器进行仿真和优化。
Matlab提供了一系列控制工具箱,如Model Predictive Control Toolbox、Advanced Control Toolbox等,可以方便地实现DMC控制器。
MATLAB中的模型预测控制算法实现方法1. 引言模型预测控制(Model Predictive Control,MPC)是一种广泛应用于工业过程控制的先进控制策略。
它基于数学模型对系统未来行为进行预测,并通过优化算法计算出最优控制输入,以实现对系统的稳定控制和性能优化。
在MATLAB中,实现MPC算法可以借助一些工具箱和函数,本文将介绍其中一种典型方法。
2. MPC算法的基本原理MPC算法通过建立系统的数学模型,预测系统未来的行为。
在每个控制时刻,MPC算法根据已知的系统状态和控制目标,计算出最优的控制输入,并将其应用于系统中。
这个优化问题可以通过求解一个多目标优化问题来完成。
3. MATLAB中的MPC工具箱MATLAB的Control System Toolbox提供了一个用于设计和实现MPC控制器的工具箱。
首先,我们需要使用命令"mpc"创建一个空白的MPC对象。
然后,我们可以通过指定MPC对象的属性来定义系统模型、控制目标、约束条件等。
4. 构建系统模型在MPC算法中,必须先构建系统的数学模型。
在MATLAB中,可以使用State Space工具箱中的ss或tf函数构建系统模型。
我们可以根据实际系统的特点选择不同的模型结构。
例如,对于连续时间系统,可以使用连续时间状态空间模型或传递函数模型;对于离散时间系统,可以使用离散时间状态空间模型或传递函数模型。
5. 设置MPC对象属性创建MPC对象后,我们需要设置一些重要的属性。
其中,PredictionHorizon属性定义了预测时间窗口的长度,即MPC算法根据模型预测未来的时长;ControlHorizon属性定义了控制时间窗口的长度,即MPC算法计算最优控制输入的时间长度。
一般来说,预测时间窗口应大于控制时间窗口。
6. 设定控制目标与约束条件MPC算法的目标是使系统的输出尽可能地接近控制目标,并同时满足一定的约束条件。
model predictive control参考课程【释义】model predictive control模型预测控制:一种先进的控制策略,通过预测未来的系统行为来优化控制器的性能。
【短语】1Model predictive Control Toolbox模型预测控制工具箱;控制工具箱2nonlinear model predictive control非线性模型预测控制3model predictive control mpc模型预测控制4Linear Model Predictive Control线性预测控制;引言线性预测控制5multiple model predictive control多模型预测控制6robust model predictive control鲁棒模型预测控制;鲁棒预测控制7novel internal model predictive control新型内模预测控制8OPC model predictive controlOPC模型预测控制【例句】1The application of Model Predictive Control to PTA equipment is presented.介绍了模型预测控制在PTA装置中的应用。
2Firstly,it considers the simple linear model predictive control algorithms.首先考虑简单的线性预测控制。
3A nonlinear model predictive control(NMPC)strategy based on T_S fuzzy model is proposed.提出了一种新的基于T_S模糊模型的非线性预测控制策略。
4Model predictive control based on the local linearization state-space model is introduced in detail.详细的介绍了基于局部线性化状态空间模型的预测控制算法。
Toolbox工具箱序号工具箱备注一、数学、统计与优化1Symbolic Math Toolbox符号数学工具箱Symbolic Math Toolbox™提供用于求解和推演符号运算表达式以及执行可变精度算术的函数。
您可以通过分析执行微分、积分、化简、转换以及方程求解。
另外,还可以利用符号运算表达式为MATLAB®、Simulink®和Simscape™生成代码。
Symbolic Math Toolbox 包含MuPAD®语言,并已针对符号运算表达式的处理和执行进行优化。
该工具箱备有MuPAD 函数库,其中包括普通数学领域的微积分和线性代数,以及专业领域的数论和组合论。
此外,还可以使用MuPAD 语言编写自定义的符号函数和符号库。
MuPAD 记事本支持使用嵌入式文本、图形和数学排版格式来记录符号运算推导。
您可以采用HTML 或PDF 的格式分享带注释的推导。
2Partial Differential Euqation Toolbox偏微分方程工具箱偏微分方程工具箱™提供了用于在2D,3D求解偏微分方程(PDE)以及一次使用有限元分析。
它可以让你指定和网格二维和三维几何形状和制定边界条件和公式。
你能解决静态,时域,频域和特征值问题在几何领域。
功能进行后处理和绘图效果使您能够直观地探索解决方案。
你可以用偏微分方程工具箱,以解决从标准问题,如扩散,传热学,结构力学,静电,静磁学,和AC电源电磁学,以及自定义,偏微分方程的耦合系统偏微分方程。
3Statistics Toolbox统计学工具箱Statistics and Machine Learning Toolbox 提供运用统计与机器学习来描述、分析数据和对数据建模的函数和应用程序。
您可以使用用于探查数据分析的描述性统计和绘图,使用概率分布拟合数据,生成用于Monte Carlo 仿真的随机数,以及执行假设检验。
回归和分类算法用于依据数据执行推理并构建预测模型。
——设计和仿真模型预测控制器
Model Predictive Control Toolbox提供了MATLAB函数、图形用户界面和Simulink模块用于设计和仿真模型预测控制器。
模型预估计控制器(Model predictive controller)可以帮助工程师优化服从输入输出约束的多输入、多输出控制系统的性能。
为了预测输入量变化对输出的影响,工具箱使用一个内置的对象模型求解控制行为。
工程师可以使用System Identification Toolbox从实验数据估算模型,从线性化的Simulink模型获取模型,或是直接指定一个线性时不变对象,比如传递函数或状态空间形式的。
对象模型可以包含延迟环节。
使用Model Predictive Control Toolbox提供的
两个模块之一直接在Simulink中设计和仿真控制器
特点
使用图形用户界面和MATLAB命令进行模型预估计控制器的设计和仿真
∙能够从实验数据或线性的Simulink模型定义一个内置的线性对象模型
∙在Simulink中直接提供Simulink模块用于设计和仿真模型预测控制器
∙利用无扰动控制切换使用多个模型预测控制器控制非线性对象
∙能够处理时变约束和权重、非对角权重及自定义不可测量的干扰模型
∙通过RTW能够生成C代码的应用发布
强大功能
使用Model Predictive Control Toolbox
Model Predictive Control Toolbox 使用图形用户界面来组织管理工程师开发的控制器,并把它加入到工程项目中,使工程师可以对项目进行
管理并尝试多种控制器。
使用Control and Estimation Tools
Manager 简化了这些工作,导入模型和以
前设计的控制器,定义被控对象的输入输出,
它们的单位及其名义值。
该管理器能在界面
中显示控制器的结构,标示设置点的个数、
操作变量、干扰及可测量和不可测量的输出。
使用Control and Estimation Tools Manager 工程师可以:
∙定义计算后续控制行为中所用的内置对象模型
∙设计模型预估计控制器
∙仿真线性模型控制器的闭环行为
定义内置对象模型
模型预测控制器的控制行为建立在其内置的过程对象模型之上。
这个内置的模型让控制器得以预见将要发生的过程行为并遵从输出约束。
具有自我更新能力的内置模型使得模型预估计控制比庞杂的耦合PID
回路更容易维护,后者当系统参数发生变化时需要对每一个回路独立进行调节。
Model Predictive Control Toolbox使用LTI模型,使工程师可以使用MathWorks控制系统设计产品系列所通用的传递函数模型结构形式。
工程师可以从MATLAB 工作空间(workspace)或是.MAT 文件中将多个LTI模型导入到工具箱中。
使用Simulink 和Simulink Control Design 工具,工程师能从Simulink中获取模型的线性化形式并自动将其导入为工具箱控制器的内部被控对象模型。
然后工程师就可以在Simulink的每一仿真步长中精炼这个内部被控对象模型。
设计控制器
工具箱可以与MATLAB 或Simulink.一起使用设计控制器。
在MATLAB中设计控制器
工程师可以设计多个控制器,并通过仿真选择最优配置。
对每一个控制器,工程师都可以选择一个对象模型并指定如下的控制器参数:
∙预期值(Prediction)和控制水平(Control horizons)
∙操作和输出变量的约束条件
∙输入输出变量的权重因子(Weighting factors)
∙用于描述不可测量输入输出扰动和测量噪声的模型
利用Control and Estimation Tools Manager 设置可操作和输出变量的约束条件工具箱支持时变约束和权重、非对角权重及自定义不可测量的干扰模型。
在Simulink中设计控制器
当Model Predictive Control
Toolbox 与Simulink Control Design
一起使用时,可以直接从Simulink模型中
创建控制器。
使用Model Predictive
Control Toolbox的模块并适当的连接模
块的输入和输出,Simulink Control
Design就能从中提取出线性化对象模型并
生成控制器。
Model Predictive Control
Toolbox 使用相同的GUI来指定
Simulink中的控制器参数,同在与
MATLAB一起使用的情形一样。
工程师可以使用多个模型预测控制器模块在一个大范围的操作条件下去控制非线性Simulink模型,也可以使用该模块对每一个操作点设计模型预测控制器,并能在模型运行时在模型预测控制器之间切换。
多个模型预测控制器模块确保在一个模型预测控制器到另一个之间的无扰动控制切换。
工程师在控制器设计时通过线性化Simulink模型或直接指定对象模型可以在每一个操作点处创建线性对象模型。
闭环特性仿真
工程师可以在MATLAB 和Simulink中仿真控制器以评估它的性能。
在MATLAB中仿真
工程师可以使用MATLAB函数或Control and Estimation Tools Manager针对线性对象模型运行模型预测控制器的闭环仿真。
工程师通过Control and Estimation Tools Manager可以创建多个仿真实例。
对每一个仿真实例,工程师可以从以下信号输入控制器设定点和不可量测的干扰:∙常数值
∙阶跃信号
∙脉冲信号
∙斜坡信号
∙正弦信号
∙Gaussian(高斯噪声)
工程师可以比较控制器与被控对象配置,以判别模型的偏差和不同权重因子对约束条件和变量的影响。
还可以暂时屏蔽约束条件的作用以评估闭环系统的动态特性,例如稳定性和阻尼。
使用Control and Estimation Tools Manager配置和运行仿真以测试控制器
在Simulink中仿真
工程师可以使用模型预测控制工具箱提供的Simulink模块针对非线性Simulink模型运行模型预测控制器的闭环仿真。
运用模型预测控制器
该工具箱提供两种方法把设计的控制器运用于实际应用。
工程师可以使用Real-Time Workshop®,在Simulink中编译生成控制器的代码,并应用于目标系统的实现或是在xPC目标上作原型应用。
(有关代码生成所支持的目标,请见产品文档“Using Model Predictive Control Toolbox with Real-Time Workshop”)。
也可以通过OPC Toolbox,将在MATLAB中操作的控制器直接连接到一个OPC兼容的系统上。