《电动汽车能量消耗量和续驶里程试验方法
第1部分:轻型汽车》国家标准征求意见稿编制说明1工作简况
1)前期研究及任务来源
为贯彻落实2025年节能目标,配合乘用车第五阶段燃料消耗量标准、《乘用车企业平均燃料消耗量与新能源汽车积分并行管理办法》制定和后续实施,在工业和信息化部装备工业司和国家标准化管理委员会指导下,中国汽车技术研究中心有限公司从2018年起开始着手进行《电动汽车能量消耗量和续驶里程试验方法》标准修订的前期预研工作。主要包括:
1)密切跟踪国外、国际轻型汽车能量消耗量和续驶里程试验方法(WLTP等),
包括现有技术内容的分析,未来更新内容的跟进等;
2)密切跟踪“中国新能源汽车产品检测工况研究和开发”(简称“中国工况”)
项目、轻型车国六排放标准(GB 18352.6—2016)相关动态,分析主要影响
因素。
2019年3月13日,全国汽车标准化技术委员会电动车辆分技术委员会审查会上审议通过了GB/T 18386《电动汽车能量消耗量和续驶里程试验方法》的修订,并同意将该标准分为轻型汽车和重型商用车辆两部分,本标准为轻型汽车部分。
2)主要工作过程
按照节能工作整体部署,《电动汽车能量消耗量和续驶里程试验方法第1部分:轻型汽车》标准修订工作于2018年正式启动,由中国汽车技术研究中心有限公司牵头组织国内外主要乘用车及轻型商用车生产企业、动力电池企业、检测机构等80余家单位共同开展研究。
自2018年启动标准修订工作以来,中汽中心标准所对国际主流标准法规的现状及发展趋势开展了广泛的调研和对比,组织召开了多次工作会议和技术交流并在工作组内部开展技术验证工作,同时充分吸取了中汽中心“中国工况”项目组取得的研究成果,为标准起草工作打下了坚实基础。2019年4月,中汽中心标准所根据前一阶段
研究和验证情况完成了标准修订草案,并在工作组内部开展了多轮意见征集与讨论,于2019年9月形成了标准征求意见稿。主要技术会议及研究活动情况如下:
表2 主要技术会议及研究活动
2标准编制原则和主要技术内容
1)研究目标
《电动汽车能量消耗量和续驶里程试验方法第1部分:轻型汽车》标准修订应满足政府主管部门的汽车节能管理需求,保障我国2025年汽车节能目标的实现,同时满足消费者获取更贴近实际驾驶和不同使用条件的能量消耗量和续驶里程信息的需要。标准修订目标包括:
?建立以常规测试方法为主,低温、高温条件下开启空调等特殊测试方法为辅的综合评价体系,全面评价车辆能量消耗量和续驶里程水平,适用于CAFC
核算、限值、标识等不同环节。
?更贴近我国实际道路交通状况和司机驾驶习惯,试验结果与实际驾驶能量消耗量和续驶里程更接近。
?尽可能充分反映更多节能技术的节能效果。
2)修订原则
《电动汽车能量消耗量和续驶里程试验方法第1部分:轻型汽车》标准的修订需考虑主管部门管理和消费者需求、行业成本、新旧试验方法切换等影响因素。在标准前期研究过程中,确定了在满足能量消耗量和续驶里程测试需求的前提下,纳入型式认证值的确定方法、系族划分、生产一致性等技术内容,明确企业声明值的使用、插值系族的计算方法以及后续一致性监管等相关要求。
2018年7月,工信部确定了下一阶段试验工况应用原则,为进一步推动“中国工况”的落地实施,下一阶段新能源汽车将采取中国工况作为试验循环。
3)适用范围
本标准规定了纯电动汽车的能量消耗量和续驶里程的试验方法。
本标准适用于N1类和最大设计总质量不超过3500kg的M1、M2类车辆。最大设计总质量超过3500kg的M1类车辆和电动正三轮摩托车可参照执行。
4)标准总体框架
《电动汽车能量消耗量和续驶里程试验方法第1部分:轻型汽车》标准包括基础试验规程和特殊试验规程两部分。其中,基础试验规程用于型式认证试验,主要引用了WLTP 中I型试验相关内容;特殊试验规程包括附录D、附录E两部分,汽车生
产企业或其授权代理者可根据需要测量车辆在低温、高温条件下开启空调下的能量消耗量和续驶里程。
5) 试验循环
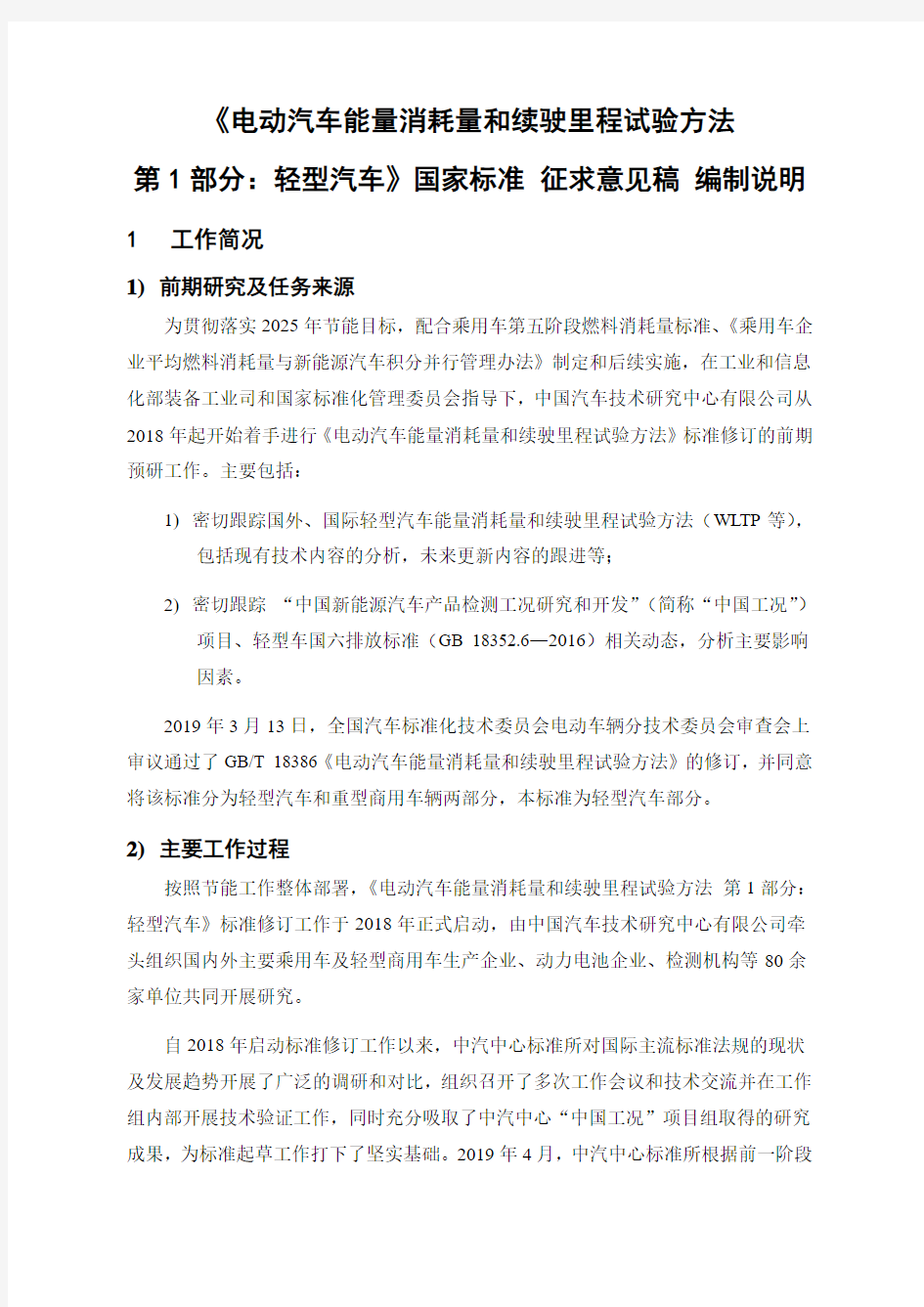
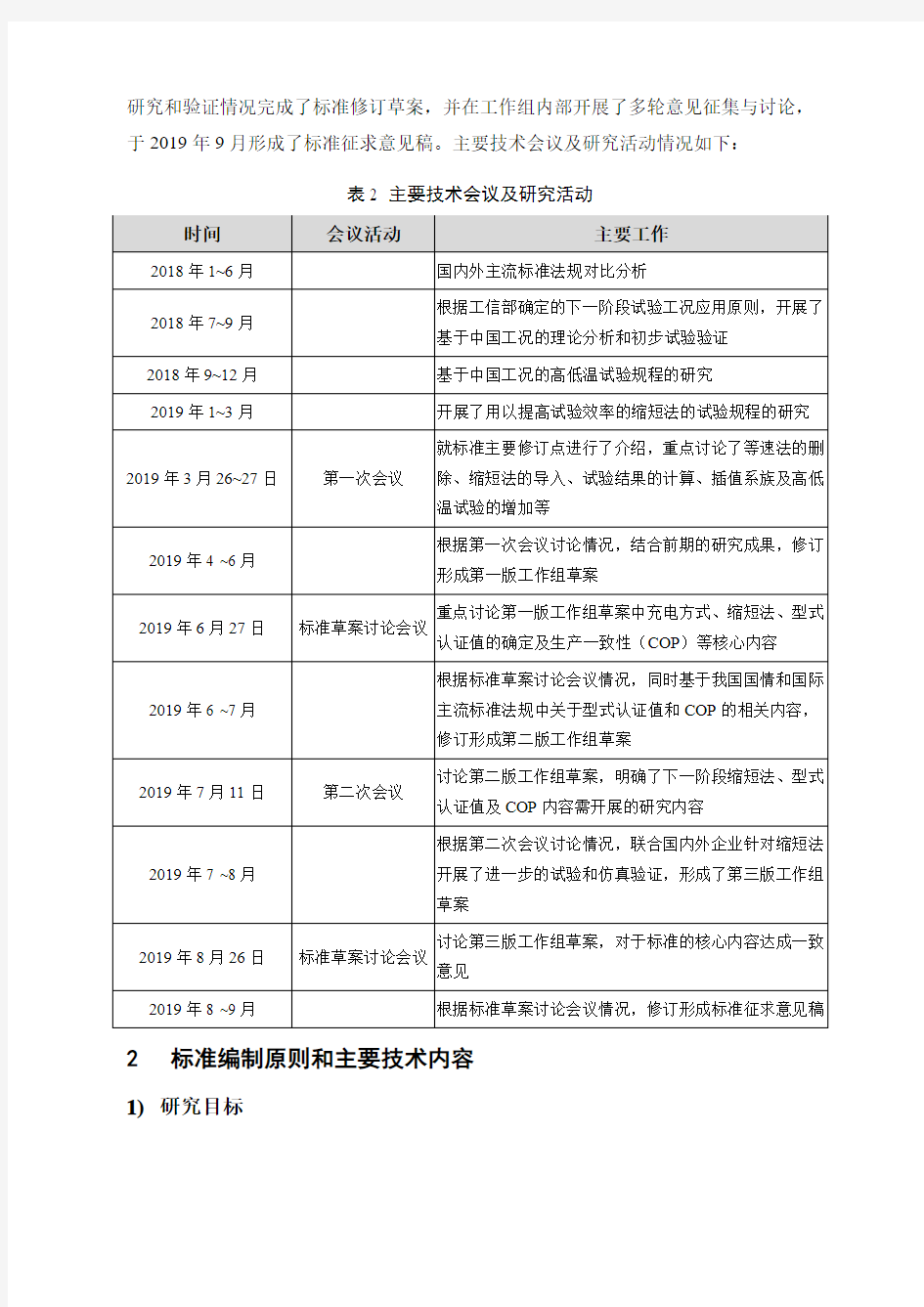
基于主管部门确定的原则,《电动汽车能量消耗量和续驶里程试验方法 第1部分:轻型汽车》标准确定纳入GB/T XXXXX.1—XXXX 《中国汽车行驶工况 第1部分:轻型汽车》中附录A 规定的中国汽车行驶工况(CLTC-P 和CLTC-C )两种试验工况,如图 1和图 2所示。
速度(k m /h )时间(s )
图 1 CLTC-P 工况曲线
速度(k m /h )时间(s )
图 2 CLTC-C 工况曲线 6) 标准修订主要变化
与GB/T 18386—2017版标准相比,新版标准除编辑性修改外主要技术变化如下:
?修改了环境要求要求,由20℃~30℃变更为(23±5)℃。
?修改了试验循环,试验循环由NEDC循环变更为中国汽车行驶工况。
?修改了道路载荷测量与测功机设定,滑行试验时,试验质量在原来的基础上,增加选择装备质量和代表性负荷质量。
?修改了试验流程,增加了缩短法,同时删除了等速法。
?修改了试验结果的计算方法。
?增加了型式认证值的规定。
?增加了试验系族的规定。
?增加了生产一致性的规定。
?修改了驾驶模式的选择。
?增加了REESS电流及电压的测试方法。
?增加了车辆在低温环境开启暖风装置制热、高温环境开启空调制冷状态下能量消耗量和续驶里程试验方法的资料性附录。
3主要试验(或)验证情况分析
标准修订过程中,中国汽车技术研究中心有限公司组织各单位开展了大量验证和分析工作,主要包括:
?选择典型车型开展了工况适应性、行驶阻力测量、常规工况法及缩短法的可行性等试验规程研究与验证;
?组织工作组单位开展基于常规工况法和缩短法的试验和仿真数据验证,累计收到24款车型的数据,进一步验证了缩短法的科学性;
?各企业根据产品结构、未来规划对能量消耗量和续驶里程型式认证值的确定、插值系族、道路载荷系族、生产一致性等内容进行了评估。
通过以上验证和分析工作,进一步验证了试验工况、试验规程、试验系族、生产一致性等主要技术内容的可行性。
4专利说明
本标准不涉及专利。
5预期达到的社会效益、对产业发展的作用等情况
《电动汽车能量消耗量和续驶里程试验方法第1部分:轻型汽车》标准是我国轻型汽车节能标准体系中一项重要的基础标准。通过标准修订,建立起以常规测试方法为主,低温、高温条件下开启空调等特殊测试方法为辅的综合评价体系,满足了政府主管部门的汽车节能管理需求,为27999《乘用车燃料消耗量评价方法及指标》、GB 22757.2《轻型汽车能源消耗量标识第2部分:可外接充电式混合动力电动汽车和纯电动汽车》等强制性标准实施、保障我国2025年乘用车、轻型商用车节能目标实现提供了有力支撑。
6采用国际标准和国外先进标准情况
1)采用国际标准情况
本标准参照联合国全球技术法规GTR 15《世界协调的轻型汽车测试程序(WLTP)》的部分技术内容。
2)与同类国际/国外标准的对比
为应对汽车发展带来的能源和环境问题,美国、欧洲、日本等全球主要国家和地区均制定了汽车燃料消耗量及温室气体排放标准法规,但在试验方法及工况等方面存在一定差异。另一方面,自2009年起,联合国欧洲经济委员会下WP29/GRPE小组启动了WLTP研究,制定了GTR-15法规《关于世界协调的轻型汽车测试程序(WLTP)技术法规》,在中国、欧洲、日本、印度等地区和国家得到了应用。
a)WLTP
2009年起,联合国欧洲经济委员会下世界车辆法规协调论坛(WP.29)启动了全球统一轻型汽车燃料消耗量和排放测试规程(WLTP,Worldwide harmonized Light vehicles Test Procedures)的研究工作,目前仍在推进过程中。WLTP主要由欧洲和日本积极推动,美国、韩国、印度等国家参与,中国也是参与国之一,该项法规在中国、欧洲、日本、印度等地区和国家得到了全部或部分应用。
WLTP主要包括DHC(Development of the Harmonized Test Cycle)和DTP (Development of Test Procedure)两个工作组,分别负责测试工况、测试程序的开发和验证工作。其中,2013年底完成的WLTC(Class3b)循环由低速、中速、高速和超高速四段构成,曲线如图3所示。循环总行驶里程为23.27km(其中市区工况3.09km,
市郊4.76km,高速7.16km,超高速8.25km),时长1800s,循环平均速度46.53km/h、怠速比例为13%。
20
40
60
80
100
120
140Ex-H(323s)
Total 1800s
High(455s)
Mid(433s)
V
e
h
i
c
l
e
S
p
e
e
d
(
k
m
/
h
)
Time(s)
Low(589s)
图 3 WLTC工况曲线
除循环工况外,WLTP还针对纯电动汽车制定了缩短法的试验流程,并规定对于续驶里程超过3个WLTC试验循环里程(69.8km)的车辆,将选取缩短法作为唯一的试验方法,示意图如图4所示。
图 4 WLTP缩短法试验流程示意图
图4中的DS1和DS2为试验循环段,CSS M和CSS E为恒速段,试验循环段包括一个WLTC循环和一个WLTC市区循环(包含低速段和中速段)用以计算车辆的能量消耗量和续驶里程,恒速段用以快速放电从而缩短试验时长。
b)美国SAE J1634
SAE J1634中采用代表市区运行的UDDS循环和高速公路上行驶状况的HFEDS 循环作为试验循环,工况曲线如图5和图6所示。同时规定对于续驶里程超过97km 的车辆,采取缩短法作为唯一的试验流程,示意图如图7所示。
图 5 UDDS工况曲线
图 6 HFEDS工况曲线
图 7 SAE J1634缩短法试验流程示意图
对照图4可以看出,SAE J1634中将每个试验循环段中的试验循环变更为UDDS + HFEDS + UDDS,其他的设置基本一致。
7在标准体系中的位置,与现行相关法律、法规、规章及相关标准,特别是强制性标准的协调性。
本标准是我国轻型汽车节能标准体系中的一项重要的基础标准。本标准与GB 27999、GB 22757.2等标准相配套,以上标准中的能量消耗量和续驶里程均依据本标准进行试验测定。本标准与现行相关法律、法规、规章及相关标准没有冲突或矛盾。8重大分歧意见的处理过程和依据
本标准修订过程中无重大分歧。
9标准性质的建议说明
本标准为推荐性标准。
10贯彻标准的要求和措施建议
本标准为推荐性标准,配合GB 27999、GB 22757.2等强制性国家标准实施。建议自2021年1月起与GB 27999(第五阶段)标准同步实施。
由于标准修订后试验循环等技术内容发生重大变化,为给企业预留充足过渡期,建议自本标准发布之日起至2020年底,允许企业在按照GB/T 18386—2017标准进行型式认证的同时,自愿申请提前开展基于新版标准的能量消耗量和续驶里程测试和型式认证。
11废止现行相关标准的建议
本标准部分替代GB/T 18386—2017,建议自本标准实施之日起废止GB/T 18386—2017中关于轻型汽车的部分。
12其它应予说明的事项
无。
2019年9月19日
制动能量回馈系统协调控制 张俊智,张鹏君,陆欣,陈鑫 清华大学汽车安全与节能国家重点实验室,北京,100084 【摘要】本文为混合动力电动汽车设计了分层控制的制动能量回馈系统,该分层结构主要包括驾驶员意图识别、能量管理和元件协调控制三个部分。分层控制结构的采用,将复杂的制动能量回馈系统简化为若干部分,降低了控制难度,为研究提供了便利。所设计的系统已在一款串联混合动力客车上实现,并根据中国城市公交循环工况进行了道路测试。 【关键词】混合动力电动汽车,制动能量回馈系统,分层控制结构,协调控制 Coordinated Control for Regenerative Braking System Zhang Junzhi, Zhang Pengjun, Luxin, Chen Xin State Key Lab. of Automotive Energy and Safety, Tsinghua University, Beijing, China, 100084 Abstract: This paper presents a design of regenerative braking system(RBS) for hybrid electric vehicles using hierarchical control structure and method. The hierarchical model is mainly composed of three modules for driver intent identification, energy management and coordinated control based on components control. As a consequence, RBS, a complicated hybrid dynamic system, is successfully decomposed by several simple modules. The control system and strategies are carried out on a typical serial HEV bus, and tested on road based china typical urban cycle.. Key words: hybrid electric vehicles, regenerative braking system, hierarchical control structure, coordinated control 1 介绍 车辆的动能通过制动能量回馈系统可转化为其它形式能量储存起来,并进一步用于车辆驱动。研究显示,在城市驾驶循环中,发动机发出能量的大约1/3至1/2被制动过程所消耗[1,2]。因此,回馈制动是车辆提高燃油经济性并降低排放的有效方法,有助于缓解能源危机和环境污染。
详解爱玛电动车速度与里程的关系 骑过电动车的人都知道,目前市场上普通的铅酸电池电动车,跑得越远越快,续行里程就越短。那么,到底是怎么回事呢?下面我们以爱玛电动车为例,来详细解读一下电动车的速度与里程的关系。 原因1:速度加快意味着电量平方倍损失 电动车在行驶时,空气阻力与速度呈现平方关系,假设速度30码空气阻力为10牛顿,在60码时的空气阻力就是100牛顿,那么要克服这么大的阻力,就需要电机的功率进行翻番,电机功率在电池电压不变的情况下,就是靠电流增加来实现的。 根据行业里的统计数据,电机在一定的速度时,就需要具备相对应的功率,具体见下表:
从上面图表看,车速从30提高到65,功率从350提高到3000;车速提高1.2倍,功率需要提高8.6倍,也就是说电流要提高8.6倍。速度提升的比例原远远低于电量消耗的比例,所以即使在电池容量等其它条件不变的情况下,续行里程也会大大缩短。 原因2:速度加快意味着电池实际容量大幅度下降 对于动力铅酸蓄电池有些认识的人都知道,电池容量不是一个常数,其大小与放电速率有密切关系,放电电流越大,容量越小。 在大电流放电时,铅酸电池的活性物质厚度方向的作用深度有限,电流越大其作用深度越小,活性物质被利用的成都越低,电池给出的容量也就越小。 以上现象深层次的原因是:电极表面优先生成硫酸铅,而硫酸铅的体积比氧化铅和铅都大,堵塞多孔电极极孔,电解液不能充分供应内部反应的需要,电极内部物质得不到充分利用,电池有效容量自然下降。下面以12AH电池,在不同放电电流情况的实际容量为例进行说明: 从上面图表看,放电电流从12A提高到24A,电池容量从6AH降低到4.8AH;放电电流提高1倍,电池容量下降20%。速度加快,放电电流加大,电池容量还要降低,续行里程自然降低。 原因3:速度加快意味着电池进入欠压点的速度加快 为防止电池过量放电,现在电动车的控制器都设置有“欠压保护”功能,就
2005005 电动汽车能量回馈的整车控制 张 毅,杨 林,朱建新,冒晓建,卓 斌 (上海交通大学汽车电子研究所,上海 200030) [摘要] 以4种典型循环工况为例对电动汽车进行能量分析,设计了基于常规汽车制动系统的整车能量回馈控制方式,研究了控制策略,完成了车辆道路试验与标定优化。试验表明,整车能量回馈控制方式与控制策略安全、可靠,且柔顺性良好;利用能量回馈技术,蓄电池能量消耗可减少10%,能有效延长电动汽车的一次充电续驶里程。 关键词:电动汽车,能量回馈,控制策略 The Control Strategy of Energy Regeneration for Electric Vehicle Zhang Yi,Yang Lin,Zhu Jianxin,Mao Xiaojian&Zhuo Bin Instit ute of A utomotive Elect ronic Technology,S hanghai Jiaotong U niversity,S hanghai200030 [Abstract] The energy consumption in four typical vehicle testing cycles(FTP,HWEFT,ECE2EUDC and J P1015)is analyzed for EV.Based on the traditional vehicle braking system,a new regenerative braking scheme and its control strategy are designed.The road testing,calibration and optimization are performed.T est results show that the control scheme and strategy is safe,https://www.doczj.com/doc/7218091849.html,ing the regenerating scheme,the energy consumption of battery can re2 duce by10percent and the driving range of EV in one charge can increase effectively. K eyw ords:Electric vehicle,E nergy regeneration,Control strategy 原稿收到日期为2003年12月29日,修改稿收到日期为2004年3月8日。 1 前言 电动汽车采用了新型的汽车动力,如何充分提 高车辆行驶能量效率,进而延长车辆续驶里程,是电 动汽车需要解决的一个关键问题。能量回馈是解决 该问题的主要技术措施。 能量回馈包括车辆制动能量回馈与车辆滑行能 量回馈两种。此时,驱动电机按发电机运行,将车辆 行驶动能转化为电能,可以起到3个作用:辅助制 动;回收能量给动力蓄电池充电,从而延长车辆续驶 里程;在车辆有供热需求时,直接利用这部分电能供 热取暖。 能量回馈制动与电动汽车其它电气制动方式 (主要有能耗制动、反接制动[1])比较,无须改变系 统硬件结构,回馈电流可柔性控制,可使制动效果与 能量回收效果综合最佳。因此,能量回馈是最适合 电动汽车的电气制动方式,其关键是能量回馈的过 程控制。电动汽车的能量回馈控制由整车控制与电 机控制交互作用而实现,作者在电动汽车制动能量 分析的基础上,设计一种能量回馈的整车控制方式, 并进行相应控制策略的研究。 2 制动能量分析 为了进行电动汽车能量回馈控制,需首先探明 其在各种用途中的制动能量回馈潜力。作者分别以 美国F TP工况、高速公路HFET工况、欧洲城市循 环ECE2EUDC工况和日本J P10154种循环工况为 例,进行制动能量的分析。 4种循环工况的驱动与制动能量如图1所示, 可见在这4种循环工况中,制动能量都占了不小的 比例,其中J P1015工况为2517%,ECE2EUDC工况 为18%,HFET工况为6%,F TP为25%。 回馈能量还与制动方式和回馈系统各环节的效 率因子有关[2]。电动汽车的制动方式包括:电气制2005年(第27卷)第1期 汽 车 工 程 Automotive Engineering 2005(Vol.27)No.1
纯电动汽车制动能量回 收技术 Document number:PBGCG-0857-BTDO-0089-PTT1998
纯电动汽车制动能量回收技术 电动汽车制动能量回收技术是利用汽车在踩动刹车进行减速时将制动效能转变为电能储存并回收到电池当中,摩擦能量没有被浪费掉而是变相扩充了电池的容量,增加了纯电动汽车的续航里程,并且减少了刹车系统耗材的磨损。 电动汽车在“新能源”话题备受瞩目的今日已经不是个陌生词语,但是电动汽车的历史比大多数人想像得要长很多。1896年还推出了为电动车换电的服务,也就是我们今天所说的“充电桩”的雏形[仇建华,张珍,电动汽车制动能量回收方式设计[J].上海汽车.2012,12.];在十九世纪末二十世纪初的交通大变革中,电动汽车作为一种新型事物快速成长但又迅速陨落。有社会环境的影响也有自身条件的限制。 目前常见的纯电动汽车,其动力电池组、电池变换器和电动机之间为电气连接,电动机、减速器和车轮之间为机械连接。 纯电动汽车制动能量回收技术研究背景 ?动车从登上历史的舞台开始,续航性能如何提升一直是人们争议很大的点。从根本上来说,续航能力可以通过
改进蓄能和驱动方式来提高,除此之外,制动能量回收也是重要的方式之一。 制动能量回收,简单来说,就是把电动汽车的电机组中无用的部分、不需要的部分,甚至有害的惯性转动带来的动能转化为电能,并返回给蓄电池,与此同时产生制动力矩,使电动机快速停止惯性转动,这整个过程也就成为再生制动过程[叶永贞,纯电动汽车制动能量回收系统研究[D].山东:青岛理工大学,2013.]。 电动汽车发展至今,已有大部分安装了类似装置以节约制动能,经过研究发现,在行驶路况频繁变化的路段,制动能量回收技术可以增加20%左右的续驶里程。 制动能量回收方法 制动能量回收方法有常见三种: 飞轮蓄能。特点:①结构简单;②无法大量蓄能。 液压蓄能。特点:①简便、可大量蓄能;②可靠性高。 蓄电池储能。特点:①无法大量蓄能②成本太高。 电动汽车制动能量回收系统的结构 无独立发电机的制动能量回收系统。①前轮驱动制动能量回收系统;②全轮驱动能量回收制动系统。有独立发电机的制动能量回收系统。 系统传动方式
专业方向模块综合设计 课题:电动车速度测量显示仪 班级测控1082 学生姓名马秀梅学号 1081203212 指导教师张青春李洪海 淮阴工学院电子与电气工程学院
一、设计内容及要求 1.检测并显示电动自行车实时速度 2.检测、显示并累计电动自行车行驶里程 3.技术参数 a电动车最高速度: 50km/h b电动车轮胎直径: 14英寸 c电动车电池电压: 24V d检测精度:±1% e显示: 8位LED 4.设计要求 (1)电路图 (2)程序清单 (3)运行结果 二、方案设计与讨论 1.速度测量原理 测量一定时间间隔T内自行车转过的圈数Q。假设车轮的周长为L,则速度V=Q*L/T 2.开关型霍尔传感器 霍尔传感器是利用霍尔效应把磁输入信号转换成电信号的器件。把开关型霍尔传感器安装在自行车贴近车轮的支架上,磁钢安装在辐条上,当磁钢靠近霍尔传感器的时候,传感器输出一个无抖动的低电平,单片机根据此信号可计算里程、速度等。霍尔
传感器的优点是稳定和安装简易,缺点是成本较高。 本设计采用开关型霍尔传感器,但由于实验室设计所限,实际测速时并未采用,而是直接从信号发生器中产生低频脉冲代替霍尔传感器向单片机输入脉冲信号,从而显示相应的速度。 3.LED八段数码管显示 8位LED显示。其中低3位显示速度,要求保留1位小数。高5位显示里程,同样要求保留1位小数。速度即时显示,最大显示位35.0,里程每走100米计数一次,最高显示9999.9。 三、系统概述及工作原理 1.本系统由信号预处理电路、单片机8051F410、系统化LED显示模块、串口数据存储电路和系统软件组成。其中信号处理电路包含信号放大、波形变换和波形整形、对待测信号进行放大的目的是降低对待侧信号的幅度要求;波形变换和波形整形电路则用来将放大的信号转换成可与单片机相连的TTL信号;通过单片机的设置可使内部定时器T0对脉冲输入引脚进行控制,这样能精确地算出加到引脚的单位时间内检测到的脉冲数;设计中速度显示采用LED模块,通过速度换算得来的里程数采用I2C总线并通过E2PROM来存储,既节省了所需单片机的口线和外围器件,同时也简化了显示部分的软件编程。
纯电动汽车制动能量回收技术 电动汽车制动能量回收技术是利用汽车在踩动刹车进行减速时将制动效能转变为电能储存并回收到电池当中,摩擦能量没有被浪费掉而是变相扩充了电池的容量,增加了纯电动汽车的续航里程,并且减少了刹车系统耗材的磨损。 电动汽车在“新能源”话题备受瞩目的今日已经不是个陌生词语,但是电动汽车的历史比大多数人想像得要长很多。1896年还推出了为电动车换电的服务,也就是我们今天所说的“充电桩”的雏形[仇建华,张珍,电动汽车制动能量回收方式设计[J].上海汽 车.2012,12.];在十九世纪末二十世纪初的交通大变革中,电动汽车作为一种新型事物快速成长但又迅速陨落。有社会环境的影响也有自身条件的限制。 目前常见的纯电动汽车,其动力电池组、电池变换器和电动机之间为电气连接,电动机、减速器和车轮之间为机械连接。 纯电动汽车制动能量回收技术研究背景 ?动车从登上历史的舞台开始,续航性能如何提升一直是人们争议很大的点。从根本上来说,续航能力可以通过改进蓄能和驱动方式来提高,除此之外,制动能量回收也是重要的方式之一。 制动能量回收,简单来说,就是把电动汽车的电机组中无用的部分、不需要的部分,甚至有害的惯性转动带来的动能转化为电能,并返回给蓄电池,与此同时产生制动力矩,使电动机快速停止惯性转动,这整个过程也就成为再生制动过程[叶永贞,纯电动汽车
制动能量回收系统研究[D].山东:青岛理工大学,2013.]。 电动汽车发展至今,已有大部分安装了类似装置以节约制动能,经过研究发现,在行驶路况频繁变化的路段,制动能量回收技术可以增加20%左右的续驶里程。 制动能量回收方法 制动能量回收方法有常见三种: 飞轮蓄能。特点:①结构简单;②无法大量蓄能。 液压蓄能。特点:①简便、可大量蓄能;②可靠性高。 蓄电池储能。特点:①无法大量蓄能②成本太高。 电动汽车制动能量回收系统的结构 无独立发电机的制动能量回收系统。①前轮驱动制动能量回收系统;②全轮驱动能量回收制动系统。有独立发电机的制动能量回收系统。 系统传动方式 液压混合动力系统的系统传动方式有四种:串联式;并联式;混联式;轮边式。 串联式混合动力驱动系统。串联式混合动力驱动系统,动力源有:发动机和高压蓄能器。 这种方式只适合整车质量小、车速不能过高的小型公交车等。 并联式混合动力驱动系统。并联式混合动力驱动系统动力源是发动机和高压蓄能器。但并联式车辆在制动能量再生系统不工作或出故障时可以由发动机单独直接驱动车辆。 并联式系统的驱动路线有两条,一条是由发动机传给变速器,
本文介绍的速度与里程表设计以单片机和光电传感器为核心。传感器将不同车速转变成的不同频率的脉冲信号输入到单片机进行控制与计算,再采用LED模块进行显示,使得电动自行车的速度与里程数据能直观的显示给使用者。 系统概述 本系统由信号预处理电路、单片机AT89C2051、系统化LED显示模块、串口数据存储电路和系统软件组成。其中信号预处理电路包含信号放大、波形变换和波形整形。对待测信号进行放大的目的是降低对待测信号的幅度要求;波形变换和波形整形电路则用来将放大的信号转换成可与单片机相连的TTL信号;通过单片机的设置可使内部定时器T1对脉冲输入引脚T0进行控制,这样能精确地算出加到T0引脚的单位时间内检测到的脉冲数;设计中速度显示采用LED模块,通过速度换算得来的里程数采用I2C总线并通过E2PROM来存储,既节省了所需单片机的口线和外围器件,同时也简化了显示部分的软件编程。 系统的原理框图如图1所示。
图1 系统的原理框图 工作原理 该设计能实时地将所测的速度与累计里程数显示出来,主要是将传感器输入到单片机的脉冲信号的频率(传感器将不同车速转变成不同频率的脉冲信号)实时地测量出来,考虑到信号的衰减、干扰等影响,在信号送入单片机前应对其进行放大整形,然后通过单片机计算出速度和里程,再将所得的数据存储到串口数据存储器,并由LED显示模块交替显示所测速度与里程。本设计的里程数的算法是一种大概的算法(假设在一定时间内自行车是匀速行进,平均速度与时间的乘积即为里程数)。 设计时,应综合考虑测速精度和系统反应时间。本设计用测量脉冲频率来计算速度,因而具有较高的测速精度。在计算里程时取了自行车的理想状态。实际中,误差控制在几米之内,相对于整个里程来说不是很大。为了保证系统的实时性,系统的速度转换模块和显示数据转BCD码模块都采用快速算法。另外,还应尽量保证其他子模块在编程时的通用性和高效性。本设计的速度和里程值采用6位显示,并包含两个小数位。 系统的硬件设计 脉冲发生源 本设计采用了ST1101红外光电传感器,进行非接触式检测。当有物体挡在红外光电发光二极管和高灵敏度的光电晶体管之间时,传感器将会输出一个低电平,而当没有物体挡在中间时则输出为高电平,从而形成一个脉冲。 该系统在自行车后轮的轴处保持着与轮子旋转切面平行的方向延伸附加一个铝盘,在这个铝盘的边沿处挖出若干个圆形过孔,把传感器的检测部分放在圆孔的圆心位置。每当铝盘随着后轮旋转的时候,传感器将向外输出若干个脉冲。把这些脉冲通过一系列的波形整形成单片机可以识别的TTL电平,即可算出轮子即时的转速。
电动汽车-课后习题答 案
第一章 1.什么是电动车辆?有哪些特征? 所谓电动车辆是指电能驱动电动机作为牵引或驱动行驶的车辆。 特征:电动车辆既有完整的动力装置,又有司机控制室等驾驶和控制设备,同时还能留出空间用于客运;电动车辆还具有编组的灵活性和电工设备分配的机动性。 2.什么是电动汽车?目前分几类? 电动汽车是电动车的一种,也是汽车的一种,即使之全部或者部分用电能驱动作为动力系统的汽车。 分类:蓄电池电动汽车,混合动力汽车,燃料电池汽车 3.电动汽车主要有几部分组成?各部分作用是什么? 电源供给系统: 驱动系统:作用是在司机的控制下高效率地将蓄电池或者发动机能量转化为车轮的动能,或者将车轮上的动能反馈到蓄电池中。电动汽车管理系统: 4.电动汽车能实现“少排放”、“零排放”吗?为什么? 以蓄电池、超级电容为动力的汽车没有排放物,可以实现零排放。以纯氢氧为燃料的汽车在运行中只生成水(H2O),不排放任何有害气体,能够实现有害气体零排放。以富氢气体为燃料的燃料电池,在富氢气体制取氢气的过程中,排出二氧化碳气体,但仅是内燃机排量的40%,燃料电池是以电化学原理发电,不经过内燃机燃烧过程的热能——机械能转换过程,几乎没有产生氮、硫氧化物的条件,所以对大气造成的危害甚少。 作业题 一.填空题 1.现代电动汽车发展主要有蓄电池电动汽车、燃料电池汽车、混合动力汽车三种类型。 2.电动汽车除具有汽车属性外,结构上形成了电源供给系统、驱动系统、控制系统和能源 管理系统。 3.电动汽车电源供给系统主要由储能装置、变换装置、电源馈电线路组成。 二.判断题 1.电动汽车是指以电作为动力源的汽车(对) 2.混合动力电动汽车是指“有两种和两种以上的储能器,能源或转换器作为驱动能源,其中 至少有一种能提供电能的车辆称为混合 电动汽车”。燃料电池+蓄电池组合形式应称为混合电动汽车。(错) 3.用太阳能电池作为动力源的汽车不属于电动汽车。(错) 4.燃料电池电动汽车可以实现零排放。(对) 5.电动汽车是以电为动力的,所以只要有电的地方都可以使用。(错)
? 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved. https://www.doczj.com/doc/7218091849.html, [新设备?新材料?新方法] 收稿日期:2006204220 作者简介:李 宪(1982-),男,河北衡水人,浙江大学电气工程学院硕士研究生,专业方向为电机与电器。一种应用在电动车上的数字速度 里程表方案 李 宪,陈敏祥 (浙江大学电气工程学院,浙江杭州 310027) 摘 要:电动自行车在城市交通中的应用越来越广泛,有着广阔的前景。本文介绍了一种应用在电动车上的速度 里程累积方法,利用电机换相信号测速和累计里程,并选用EEPR OM 器件来保存里程值。给出了基于A T 89C 2051芯片的数字速度 里程表的具体实现方案。通过实验验证,此方案可行,可考虑发展规模化生产。关 键 词:无刷直流电机;电动车;测速;里程 中图分类号:U 484 文献标志码:A 文章编号:100522895(2007)022******* 1 系统任务 近年来,电力电子技术的飞速发展带动了电机行 业新的革命。本文介绍了一种基于A T 89C 2051芯片的应用在电动车上的数字速度 里程表,主要适用于有位置传感器的无刷直流电机。 直流无刷电机,是一种应用范围很广的机电一体化设备,由电动机、转子位置检测器和驱动电路组成。其基本原理是用电子线路来取代直流电机的电刷和换向器。,转子传感器就发出一个信号,使线路中的一些电子元器件按预定的逻辑导通或关断,控制绕组线圈,或者使线圈中的电流改变方向,通过电子换向,使电机受到单一方向力矩而转动。数字里程表就是利用对电机换向信号的检测,掌握电机转子位置的信息,并据此算出电机转速,同时进行累计,通过电动车的轮径信息,得出速度、里程,显示在L CD 面板上。作为一款实用性产品的研究,电动车车载电池的电压信息也要同时显示,以便用户对电量情况的掌握。2 系统介绍 系统选用A T 89C 2051来处理所需的信号采样、速度测量、里程累积、送显示,以及数据的保存。如图1。 在实验系统里,L CD 采用1602A 进行显示,EEPROM 选用的是有I 2C 总线的BR 24C 01A 。按功能可分为测速及里程模块,A D 模块,显示模块和存储模块。 (1)测速及里程模块 传统的测速方法分为M 法,T 法以及M T 法 。由 图1 系统硬件框图 于电动车速度的变化范围一般不大,而单片机的运算速度不利于做除法运算,这里采用单位时间测脉冲数的方法。为了合理利用系统资源,这里使用外部中断来监测位置信号。对位置信号的每一个下降沿,都会引起中断程序的执行,从而保证不漏掉脉冲。为了让脉冲信号正常无误,布板时,应注意脉冲信号的走线要走最短回路。无刷直流电机的转速范围一般在100~3000r m in ,每圈霍尔信号变化为6P 周期(P 为极对数)。这里取P =2分析,每秒有20~600个周期。这样每2次中断之间的时间间隔,为1.5~50m s 。而一次中断程序的执行时间为u s 级,所以不会发生一次中断未执行完,又一次脉冲又发生的情况。据以上估计,可取200m s 为一个计时周期,可以保证8位的脉冲计数器char 型不会溢出一个计时周期内霍尔信号的周期数。根据电动车轮径等信息,设置里程预设值,每发生一次外部中断,里程累积值加1。当累积值达到预设值时,里程加1,累积值清零,以此实现电动车的里程累积。 (2)存储模块 第25卷第2期2007年4月 轻工机械 L ight I ndustry M achi nery V o l .25N o.2 A p r .2007
电动车组合仪表 MKYB-A4812 说 明 书 广州迈凯电子科技有限公司 2010年
一、概述: MKYB电动车数字组合仪表采用了先进的电子技术成果,对输入信号进行了高精度的数字化处理,主要有指示灯、电流表、电压表、电量表、以及小时计、车速表、里程表7部分组成。液晶显示器通过内部微处理器的控制能显示多种信息,十段数码显示条可以清晰的显示车辆电池的状态,六组状态指示灯可以实时准确的指示车辆的状态。该仪表克服了传统仪表精度差,稳定度不高,参数修改和扩展困难,发热量大,耗电多,易损坏,开放性差等缺点,具有外形美观、性能稳定、易扩展的优点。是各种电动轿车、游览车、牵引车、高尔夫球车的理想配置。 产品实物 二、技术参数: 电源说明: 正常工作电压30V-72V 指示灯工作电压为12V 转速传感器脉冲高电平为5~12V 1.指示灯 内容: 左转向灯(绿色)、右转向灯(绿色)、远光灯(蓝色)、前雾灯(绿色)、驻车制动灯(红色)、后雾灯(黄色)、近光灯(绿色)、位置灯(绿色)、倒车灯(绿色) 操作方法: 把“左转向灯、右转向灯、远光灯、前雾灯、驻车制动灯、前雾灯、近光灯、位置灯、倒车灯”信号分别接+12V电源,对应的指示灯应对应点亮,且颜色符合要求。 平时背光灯不点亮。把“大灯”信号接+12V电源,背光灯应该点亮。 2.电流表 内容: 以指针方式实时显示电流。指示范围:0~300(A) 标准: 电流波动范围小于4A,误差小于正负4A。 操作方法: 使用300A/75mV的分流器。把分流器串接在电源主回路中。且分流器负极、仪表负极都直接从蓄电池负极直接引线。分流器正极接仪表正极,分流器负极接仪表负极。
关于纯电动汽车续航里程的计算方法最近因为工作原因开始研究纯电动汽车续航里程计算问题,后来在网上查找了一些这方面的资料,但是也没找到太准确的计算方法,根据最近一段时间的学习,对于续航里程计算我在这做一个自我认识的总结,希望对大家有用。 首先我需要提到一个《汽车理论》第四版,清华大学余志生主编的课本第67 页有一个关于电动车续航里程计算的公式,具体如下: 在这个公式中,蓄电池总能量就是我们提到的电池时的12V 100Ah这两个参数的乘积,但是这样得出来的结果单位是W.h,不需要公式里再乘以10的3次方了。另外电机及控制器效率是指电能在通过电机控制器到达电机时有能量损耗,电机自身产生机械能时也有损耗,两次传输效率乘积就是电机及控制器效率,这个参数依据不同的电机及电机控制器型号是不一样的,这个地方说取0.9只是个例子,不代表通用值。 电池平均放电效率是由电池厂家提供的一个电池放电曲线图得出的,如下图:
电池在不能的放电倍率(放电倍率是指100Ah容量的电池以100A的电流放电就称为以1CA的电流放电)下,能放出的总电能是不同的,放电速度越快,放出的总电能越少。这个地方我需要说明下,平时我们所提到的电池容量,如100Ah,是指电池的额定容量,在一定的放电条件下进行放电,这100Ah的电量是完全可以被放出来的,而且还可以超额放电,最多能放出120%的额定容量的电量。要说明的是,我这些都是针对铅酸电池而言,其他电池暂时不清楚。依据上图,该型号的电池在每一个放电倍率时,都能从图中读出它以该放电倍率放电所能持续的时间,放电倍率乘以放电时间就是放电效率。对放电曲线图里的所有倍率下的放电效率求平均值,就得出了平均放电效率。 这个参数大家应该都知道,这是传动效率。 但是在上述汽车理论公式中的0.7系数,我一直不知道是什么意思,后来我个人认为是作者认为在汽车形势中,电池的70%能量用在了汽车行驶上,其他30%用在了电器空调上。 另外一种求续航里程的方法: 首先大家应该明白电动车的能量流程图
现代汽车电子技术 题目:电动助力转向系统 摘要 本文从全球环境污染和能源短缺等严峻问题阐述了发展电动汽
车的重要性和必要性,着重分析概括了电动汽车制动能量回收系统的研究现状 关键字电动汽车制动能量回收系统 1 引言 目前,普通燃油汽车在国内外仍占据绝大部分汽车市场。汽车发动机燃烧燃料产生动力的同时排放出大量尾气,其成分主要有二氧化碳(CO2),一氧化碳(CO),氮氧化合物(NO X)和碳氢化合物(HC),还有一些铅尘和烟尘等固体细微颗粒物,虽然现代汽车技术已经使汽车尾气排放降到很低,但由于汽车保有量持续高速增加,汽车排放的尾气还是会对人类的生存环境造成很严重的影响,例如近年来不断加剧的温室效应,光化学烟雾,城市雾霾等大气污染现象。 内燃机汽车消耗的能源主要来自石油,石油属于不可再生资源,目前全球已探明的石油总量为12000.7亿桶,按现在的开采速度将只够开采40.6年左右,即使会不断发现新的油田,但总会有消耗的一天。全球交通领域的石油消耗占石油总消耗的57%,由于汽车的保有量持续快速增长(主要来自发展中国家),到2020年预计这一比例将达到62%以上,2010年我国的石油对外依存度已达到53.8%,到2030年预计这一比例将达到80%以上,可见石油资源的短缺将会直接影响我国的能源安全,经济安全和国家安全,不利于我国长期可持续的发展,因此探索石油以外的汽车动力能源是21世纪迫切需要解决的问题。 电动汽车具有无污染,已启动,低噪声,易操纵等优点,相关的技术研究已趋成熟,是公认的未来汽车的主流。自1997年10底丰田推出混合动力车型Prius 以来,电动汽车越来越受市场的欢迎,近年来不少国内外汽车生厂商已向市场推出不少种类的电动汽车,在混合动力汽车领域,日本的丰田和本田不管从技术研发还是在市场销售,宣传等方面已经走在世界的前列,推出了诸如Pius,Insight,Fit,Civic 等量产化混合动力车型,其他国外汽车制造商在本田和丰田之后也相继推出相应的车型,例如宝马3系,5系,7系,8系都推出了相应的混合动力车型,大众途锐的混合动力版,特斯拉推出的MODEL S 纯电动车,国内汽车生产商比亚迪在电动汽车领域已经走在前列,相继推出包含“秦”在内的许多种混合动力车型。
https://www.doczj.com/doc/7218091849.html,/p-00292965611.html 基于单片机与光电传感器的电动自行车速度与里程表的设 计 从保护环境和经济条件许可等因素综合来看,电动自行车目前乃至今后都有着广阔的发展空间。目前市面上电动自行车的速度表和里程表都是机械的,看起来不够直观与方便。如果能用LED直接显示出来里程数或速度值,就可节省用户的时间及精力处理自行车行进过程中的突发事件。 本文介绍的速度与里程表设计以单片机和光电传感器为核心。传感器将不同车速转变成的不同频率的脉冲信号输入到单片机进行控制与计算,再采用LED模块进行显示,使得电动自行车的速度与里程数据能直观的显示给使用者。 系统概述 本系统由信号预处理电路、单片机AT89C2051、系统化LED显示模块、串口数据存储电路和系统软件组成。其中信号预处理电路包含信号放大、波形变换和波形整形。对待测信号进行放大的目的是降低对待测信号的幅度要求;波形变换和波形整形电路则用来将放大的信号转换成可与单片机相连的TTL信号;通过单片机的设置可使内部定时器T1对脉冲输入引脚T0进行控制,这样能精确地算出加到T0引脚的单位时间内检测到的脉冲数;设计中速度显示采用LED模块,通过速度换算得来的里程数采用I2C总线并通过E2PROM来存储,既节省了所需单片机的口线和外围器件,同时也简化了显示部分的软件编程。 系统的原理框图如图1所示。
图1 系统的原理框图 工作原理 该设计能实时地将所测的速度与累计里程数显示出来,主要是将传感器输入到单片机的脉冲信号的频率(传感器将不同车速转变成不同频率的脉冲信号)实时地测量出来,考虑到信号的衰减、干扰等影响,在信号送入单片机前应对其进行放大整形,然后通过单片机计算出速度和里程,再将所得的数据存储到串口数据存储器,并由LED显示模块交替显示所测速度与里程。本设计的里程数的算法是一种大概的算法(假设在一定时间内自行车是匀速行进,平均速度与时间的乘积即为里程数)。 设计时,应综合考虑测速精度和系统反应时间。本设计用测量脉冲频率来计算速度,因而具有较高的测速精度。在计算里程时取了自行车的理想状态。实际中,误差控制在几米之内,相对于整个里程来说不是很大。为了保证系统的实时性,系统的速度转换模块和显示数据转BCD码模块都采用快速算法。另外,还应尽量保证其他子模块在编程时的通用性和高效性。本设计的速度和里程值采用6位显示,并包含两个小数位。 系统的硬件设计 1.脉冲发生源 本设计采用了ST1101红外光电传感器,进行非接触式检测。当有物体挡在红外光电发光二极管和高灵敏度的光电晶体管之间时,传感器将会输出一个低电平,而当没有物体挡在中间时则输出为高电平,从而形成一个脉冲。 该系统在自行车后轮的轴处保持着与轮子旋转切面平行的方向延伸附加 一个铝盘,在这个铝盘的边沿处挖出若干个圆形过孔,把传感器的检测部分放在圆孔的圆心位置。每当铝盘随着后轮旋转的时候,传感器将向外输出若干个脉冲。把这些脉冲通过一系列的波形整形成单片机可以识别的 TTL电平,即可算出轮子即时的转速。 铝盘的圆孔的个数决定了测量的精度,个数越多,精度越高。这样就可以
第32卷 第15期2010年8月 武 汉 理 工 大 学 学 报 JOURNAL OF WUHAN UNIVERSITY OF TECHNOLOGY Vo l.32 N o.15 A ug.2010 DOI:10.3963/j.issn.1671-4431.2010.15.022 纯电动汽车再生制动系统的建模与仿真 张亚军,杨盼盼 (长安大学电子与控制工程学院,西安710064) 摘 要: 为提高纯电动汽车的再生制动能量回收率,通过分析制动系统的工作原理,建立了纯电动汽车制动力分配的数学模型,并根据制动强度和储能元件荷电状态的大小,设计了基于模糊逻辑的制动力分配控制策略,以实现制动能量的高效回收利用。结合典型道路循环工况,利用电动汽车仿真软件ADV ISOR2002对制动力分配的模糊控制策略进行了整车运行仿真验证。结果表明,该制动力分配控制策略改善了制动能量回收率,有利于合理利用其有限的能量延长电动汽车的续驶里程。 关键词: 纯电动汽车; 再生制动系统; 制动力分配; 控制策略中图分类号: U 469.72 文献标识码: A 文章编号:1671-4431(2010)15-0090-05 Modeling and S imulation of Regenerative Braking System for Pure Electric Vehicle Z H ANG Ya -j un,YANG Pan -p an (School of Electronic and Contr ol Engineer ing ,Chang .an U niversity,Xi .an 710064,China) Abstract: In or der to enhance the recycling efficiency of reg enerative braking energy for pure electr ic vehicles (PEV ),the br aking system model of P EV is proposed on the basis of analyzing the braking oper at ion principle.T og ether with t he br aking severity and the state of charge (SOC)of energ y storage element,a nov el contro l strateg y of braking force distribution based o n fuzzy log ic is desig ned,which can realize the high efficiency recycling of braking energ y.T he simulat ion of the fuzzy control strategy for br aking force distribution is carried out in typical driving cycle by the electric vehicle simulatio n software A DVI -SOR 2002.T he simulation results show that t he braking force distribution co ntrol strategy can improve the recy cling efficiency of regenerative br aking energ y,and prolong PEV .s driv ing rang e by rational use of the limited energy. Key words: pure electr ic vehicle; regenerativ e braking system; br aking force distribution; control str ategy 收稿日期:2010-02-04.作者简介:张亚军(1982-),男,硕士生.E -mail:zyajun2010@163.co m 电动汽车作为一种新型的交通工具,以其清洁无污染、驱动能量源多样化、能量效率高等优点成为现代汽车的发展趋势[1]。但其续驶里程不足成为阻碍电动汽车商品化的瓶颈,因此,提高电动汽车续驶里程是亟待解决的一个关键问题。再生制动是电动汽车的特有技术,其功能是在保证电动汽车行驶稳定性的前提下,将电动汽车制动时的一部分机械能经再生制动系统转换为电能存储到储能单元中[2] 。因此再生制动对 降低电动汽车的能耗,延长续驶里程,提高其经济性能有重要的作用。文献[3,4]基于制动安全性要求,通过对电动汽车再生制动系统中保留摩擦制动的必要性展开研究,提出了一种新的再生制动控制策略,所提出的控制策略可通过检测电动汽车制动强度的大小,将电动汽车制动时总制动力需求在驱动轮与从动轮之间分配。文献[5]分析了在制动稳定性条件下,电动汽车再生制动系统制动能量回收能力,并从动力学角度建立了驱动轮电气制动力和摩擦制动力制动份额随制动强度变化的模型。但上述文献在分析电动汽车再生制动
《基于单片机的电动车里程表设计》 目录 引言 (1) 1.总体设计 (2) 2.设计任务及要求 (2) 3.电路原理 (2) 4.硬件系统模块 (3) 4.1芯片的选择 (6) 4.2结构框图 (7) 5.软件系统设计 (7) 5.1控制系统源程序 (11) 6.调试 (13) 7.参考文献 (13)
引言 里程表广泛应用于各类机车,传统的机械式里程表虽然稳定可靠,但功能单一、易受磨损。随着电子技术的迅猛发展,电子式里程表得以广泛应用,现在很多轿车仪表已经使用电子车速里程表,从保护环境和经济条件许可等因素综合来看,电动自行车目前乃至今后都有着广阔的发展空间。目前市面上电动自行车的速度表和里程表都是机械的,看起来不够直观与方便。如果能用液晶显示屏直接显示出来里程数和速度值,就可节省用户的时间及精力处理自行车行进过程中的突发事件。 本设计介绍一种基于单片机的智能电子里程表。该电子式里程表是一种数字式仪表,主要由车速表和里程表两部分组成,其传感器采用无接触测量的光电传感器。传感器将不同车速转变成的不同频率的脉冲信号输入到单片机进行控制与计算,再采用液晶显示器模块进行显示,使得电动自行车的速度与里程数据能直观的显示给使用者。它不仅可显示车辆行驶的总里程,还可显示当前车速,以及实现超速报警等功能,并具有较强的再开发能力。它的实现方式是,通过安装在汽车转轴上的测量盘,用光电式转速传感器检测转速的脉冲信息,在脉冲状态下,将转速的变化转换成光通量的变化,再通过光电转换元件将光通量的变化转换成电量的变化,接着通过频率测量电路将脉冲信号输入到单片机中,然后依据电量与转速的函数关系实现转速测量,再通过计算,从而得出里程、车速的信息,并由液晶显示器显示出来。
电动汽车续驶里程的影响因素 影响电动汽车续驶里程的因素比较复杂,与电动汽车在行驶过程中的能量消耗紧密相关,影响它们的主要因素来自电动汽车行驶的外部条件与本身的结构条件。 (1)环境状况 在相同的车辆条件下,道路与环境气候影响着电动汽车的能量消耗,道路状况较差、交通拥挤等都会使车辆的能量消耗增加,降低电动汽车的续驶里程;反之,道路状况良好、交通畅通等就会相对节省车辆的能量消耗,进而增加电动汽车的续驶里程。 (2)环境温度 【陆地方舟电动汽车网https://www.doczj.com/doc/7218091849.html,】环境温度对电动汽车的续驶里程有着重要的影响。首先,温度对动力电池的性能影响比较大,每种动力电池都有自己最佳的工作温度,且在不同的温度时,动力电池组放出的能量及内阻等有很大的差别:温度过低时,可用的能量和容量大为减少,动力电池的内阻也会呈非线性增长严重制约了电动汽车续驶里程。其次,汽车内部各润滑部分、气泵、转向油泵的工作效率以及空气阻力等都与环境温度有一定的关系。资料表明,温度由25℃降低到O℃的过程中,电动汽车的阻力增加10%,增加了电动汽车的能耗,使得续驶里程大为减少。 (3)电动汽车的总质量 对电动汽车车身的要求与普通燃油车基本一致,在满足刚度和强度要求的情况下,应力求车身的轻量化。在工况一定时,电动汽车的能耗和质量基本呈线性关系。 (4)辅助装置的能量消耗 电动汽车上制动系统的空气压缩机、转向系统的油泵等均需要辅助电机驱动,其他还有照明、音响、通风、取暖、空调都需要消耗动力电池的电能。除空调之外,这部分能量消耗约占电动汽车总能耗的6%~12%。 (5)电池的性能 电池的性能参数主要是指动力电池的能量密度、额定容量、放电率、放电电流、放电深度、动力电池内阻,特别是动力电池组的一致性等是影响电动汽车的能量消耗和续驶里程的重要因素。例如电池持续在高倍率的充放电状态下,动力电池的可用放电容量和能量就会减少许多,使得电动汽车的续驶里程减少;动力电池组在充放电的过程中,如果并联电池组中的电池性能存在差异,电压高的电池组会对电压低的电池组进行充电,易引起充电时过充电,放电时过放电,这就会消耗动力电池组对外的输出功率,影响续驶里程。