‘IEEE Transactions on Pattern Recognition And Machine Intelligence’ ‘IEEE Transactions on Image Processing’ 是最重要的两本,其它的如ICCV、CVPR、ECCV、NIPS、BMVC等的会议文章也非常好。 最小二乘线性拟合算法、随机霍夫变换、局部霍夫变换、 canny算子边缘检测、图像增强 霍夫变换 霍夫变换(Hough Transform)是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进算法。主要用来从图像中分离出具有某种相同特征的几何形状(如,直线,圆等)。最基本的霍夫变换是从黑白图像中检测直线(线段)。 详细内容 我们先看这样一个问题:设已知一黑白图像上画了一条直线,要求出这条直线所在的位置。我们知道,直线的方程可以用y=k*x+b 来表示,其中k和b是参数,分别是斜率和截距。过某一点(x0,y0)的所有直线的参数都会满足方程y0=kx0+b。即点(x0,y0)确定了一组直线。方程y0=kx0+b在参数k--b平面上是一条直线(你也可以是方程b=-x0*k+y0对应的直线)。这样,图像x--y平面上的一个前景像素点就对应到参数平面上的一条直线。我们举个例子说明解决前面那个问题的原理。设图像上的直线是y=x, 我们先取上面的三个点:A(0,0), B(1,1), C(2,2)。可以求出,过A点的直线的参数要满足方程b=0, 过B点的直线的参数要满足方程1=k+b, 过C点的直线的参数要满足方程2=2k+b, 这三个方程就对应着参数平面上的三条直线,而这三条直线会相交于一点(k=1,b=0)。同理,原图像上直线y=x上的其它点(如(3,3),(4,4)等) 对应参数平面上的直线也会通过点(k=1,b=0)。 应用 这个性质就为我们解决问题提供了方法:首先,我们初始化一块缓冲区,对应于参数 平面,将其所有数据置为0.对于图像上每一前景点,求出参数平面对应的直线,把这 直线上的所有点的值都加1。最后,找到参数平面上最大点的位置,这个位置就是原 图像上直线的参数。上面就是霍夫变换的基本思想。就是把图像平面上的点对应到参 数平面上的线,最后通过统计特性来解决问题。假如图像平面上有两条直线,那么最 终在参数平面上就会看到两个峰值点,依此类推。在实际应用中,y=k*x+b形式的直 线方程没有办法表示x=c形式的直线(这时候,直线的斜率为无穷大)。所以实际应用 中,是采用参数方程p=x*cos(theta)+y*sin(theta)。这样,图像平面上的一个点就 对应到参数p—theta平面上的一条曲线上。其它的还是一样。 应用实例1
Matlab小波函数 Allnodes 计算树结点 appcoef 提取一维小波变换低频系数 appcoef2 提取二维小波分解低频系数 bestlevt 计算完整最佳小波包树 besttree 计算最佳(优)树 *biorfilt 双正交样条小波滤波器组 biorwavf 双正交样条小波滤波器 *centfrq 求小波中心频率 cgauwavf Complex Gaussian小波 cmorwavf coiflets小波滤波器 cwt 一维连续小波变换 dbaux Daubechies小波滤波器计算 dbwavf Daubechies小波滤波器dbwavf(W) W='dbN' N=1,2,3,...,50 ddencmp 获取默认值阈值(软或硬)熵标准 depo2ind 将深度-位置结点形式转化成索引结点形式detcoef 提取一维小波变换高频系数 detcoef2 提取二维小波分解高频系数 disp 显示文本或矩阵 drawtree 画小波包分解树(GUI) dtree 构造DTREE类 dwt 单尺度一维离散小波变换
dwt2 单尺度二维离散小波变换 dwtmode 离散小波变换拓展模式 *dyaddown 二元取样 *dyadup 二元插值 entrupd 更新小波包的熵值 fbspwavf B样条小波 gauswavf Gaussian小波 get 获取对象属性值 idwt 单尺度一维离散小波逆变换 idwt2 单尺度二维离散小波逆变换 ind2depo 将索引结点形式转化成深度—位置结点形式*intwave 积分小波数 isnode 判断结点是否存在 istnode 判断结点是否是终结点并返回排列值 iswt 一维逆SWT(Stationary Wavelet Transform)变换iswt2 二维逆SWT变换 leaves Determine terminal nodes mexihat 墨西哥帽小波 meyer Meyer小波 meyeraux Meyer小波辅助函数 morlet Morlet小波 nodease 计算上溯结点 nodedesc 计算下溯结点(子结点)
function [Spec,Freq]=STFT(Sig,nLevel,WinLen,SampFreq) %计算离散信号的短时傅里叶变换; % Sig 待分析信号; % nLevel 频率轴长度划分(默认值512); % WinLen 汉宁窗长度(默认值64); % SampFreq 信号的采样频率(默认值1); if (nargin <1), error('At least one parameter required!'); end; Sig=real(Sig); SigLen=length(Sig); if (nargin <4), SampFreq=1; end if (nargin <3), WinLen=64; end if (nargin <2), nLevel=513; end nLevel=ceil(nLevel/2)*2+1; WinLen=ceil(WinLen/2)*2+1; WinFun=exp(-6*linspace(-1,1,WinLen).^2); WinFun=WinFun/norm(WinFun); Lh=(WinLen-1)/2; Ln=(nLevel-1)/2; Spec=zeros(nLevel,SigLen); wait=waitbar(0,'Under calculation,please wait...'); for iLoop=1:SigLen, waitbar(iLoop/SigLen,wait); iLeft=min([iLoop-1,Lh,Ln]); iRight=min([SigLen-iLoop,Lh,Ln]); iIndex=-iLeft:iRight; iIndex1=iIndex+iLoop; iIndex2=iIndex+Lh+1; Index=iIndex+Ln+1; Spec(Index,iLoop)=Sig(iIndex1).*conj(WinFun(iIndex2)); end; close(wait); Spec=fft(Spec); Spec=abs(Spec(1:(end-1)/2,:));
基于MATLAB的(小波)图像处理 姓名:宋富冉 学号:P1******* 院系:电子信息工程学院 专业:电子与通信工程 日期:2015年11月7日
目录 摘要 (3) 第一章初期准备 1.1软件知识储备及学习 (4) 1.2 MATLAB操作平台安装及应用 (4) 1.3操作函数功能及调试 (5) 第二章图像准备 2.1图像采集 (6) 2.2 图像选择和保存 (6) 第三章程序设计及实现 3.1 软件编程调试 (7) 3.2 实现及优化程序 (11) 第四章完成任务报告 4.1报告书写 (12) 4.2总结 (12) 附录 (13)
摘要 本报告主要阐述有关于MABLAT在图像处理方面实际应用中的 六个方面的问题,分别涉及图像的读取、图像添加噪声、利用小波 函数对图像进行分割、分割后图像的重构、图像去除噪声、将程序 处理过程中所得各种图像确定存储格式并保存到指定的磁盘及命名。最终得到预期任务的要求,完成任务。 关键词:图像读取,图像加噪,图像去噪,图像重构,图像保存
第一章初期准备 1.1软件知识储备及学习 由于本人从未学习过MATLAB这门课程及其编程语言,对其一无所知,在之前的学习过程中,比较多的是应用C语言进行一些简单的及较复杂的任务编程。因此,接到任务之日起,本人就开始学习储备有关于此方面的软件知识,并逐步学习了解它的奥妙所在。 首先,是漫无目的的到图书馆查找有关于此类的各种书籍,并上网搜索各类处理程序和文档,以期寻求到刚好符合此次作业任务要求的完整程序设计及源代码。结果是可想而知的,并没有完全吻合的程序与代码。其次,在以上的查找翻看过程中,本人接触到了很多与此任务相关相通的程序设计和处理函数的功能及应用知识,受其启发,自我总结,将实现本任务所要用到的功能函数一一搜集了起来,初步了解了本任务如何开启。 1.2 MATLAB操作平台安装及应用 通过前期的理论准备,下一步就要开始上机实际操作和仿真各个函数在实际应用中的效果。第一步,就是寻求MATLAB操作平台的安装包或安装程序,在自己的桌面上把它装起来,以便后面随时随地使用操作,也为后期更深入的学习此门语言而准备好最基本的学习工具,从而为以后完全掌握此门语言工具打下基础。第二步,就是对本平台的安装和使用,由于此平台有中英文两个版本,于是这对我本人又是一种考验,由于英语专业词汇并不完全过关,对操作菜单中多个名词词组的用意并
function x=MyIFFT_FB(y) %MyIFFT_TB:My Inverse Fast Fourier Transform Time Based %按频率抽取基2-傅里叶逆变换算法 %input: % y -- 傅里叶正变换结果,1*N的向量 %output: % x -- 逆变换结果,1*N的向量 %参考文献: % https://www.doczj.com/doc/71114443.html,/view/fea1e985b9d528ea81c779ee.html N=length(y); x=conj(y); %求共轭 x=MyFFT_FB(x);%求FFT x=conj(x);%求共轭 x=x./N;%除以N end %% 内嵌函数====================================================== function y=MyFFT_FB(x,n) %MYFFT_TB:My Fast Fourier Transform Frequency Based %按频率抽取基2-fft算法 %input: % x -- 输入的一维样本 % n -- 变换长度,缺省时n=length(x) 当n小于x数据长度时,x数据被截断到第n个数据% 当n大于时,x数据在尾部补0直到x 含n个数据 %output: % y -- 1*n的向量,快速傅里叶变换结果 %variable define: % N -- 一维数据x的长度 % xtem -- 临时储存x数据用 % m,M -- 对N进行分解N=2^m*M,M为不能被2整除的整数 % two_m -- 2^m % adr -- 变址,1*N的向量 % l -- 当前蝶形运算的级数 % W -- 长为N/2的向量,记录W(0,N),W(1,N),...W(N/2-1,N) % d -- 蝶形运算两点间距离 % t -- 第l级蝶形运算含有的奇偶数组的个数 % mul -- 标量,乘数 % ind1,ind2 -- 标量,下标 % tem -- 标量,用于临时储存 %参考文献: % https://www.doczj.com/doc/71114443.html,/view/fea1e985b9d528ea81c779ee.html %% 输入参数个数检查
基于MATLAB的小波变换在信号分析中应用的实现 院系:应用技术学院 专业:电子信息工程 姓名:李成云 指导教师单位:应用技术学院 指导教师姓名:王庆平 指导教师职称:讲师 二零一一年六月
The application of wavelet transform based on MTLAB in signal analysis Faculty:Application and Technology Institute Profession:Electronic information engeering Name:Li Chengyun Tutor’s Unit:Application and Technology Institute Tutor:Wang Qingping Tutor’s Title:Lecturer June 2011
第 I 页 目录 摘要 (1) ABSTRACT (2) 前言 (3) 第1章 绪论 (4) 1.1 本文的研究背景意义 (4) 1.2 国内外研究现状 (5) 1.3 本文的研究内容 (7) 第2章 MATLAB 简介 (8) 2.1 MATLAB 的概况 (8) 2.2 MATLAB6.1 的功能 (8) 2.3 MATLAB 的主要组成部分 (9) 2.4 MATLAB 的语言特点 (10) 第3章 基本理论 (12) 3.1 从傅里叶变换到小波变换 (12) 3.1.1 傅里叶变换 (12) 3.1.2 短时傅里叶变换 (13) 3.1.3 小波变换 (14) 3.2 连续小波变换 (15) 3.3 离散小波变换 (17) 3.4 小波包分析 (18) 3.5 多分辨率分析与M ALLAT 算法 (19) 3.5.1 多分辨率分析 (19) 3.5.2 Mallat 算法 (19) 3.6 本章小结 (20) 第4章 小波阈值法图像去噪 (21) 4.1 图像去噪 (21) 4.1.1 邻域平均法 (22) 4.1.2 中值滤波法 (24) 4.2 小波阈值去噪 (27) 4.2.1 阈值去噪原理 (28) 4.2.2 选取阈值函数 ................................................ 28 4.2.3 几种阈值选取方法 .. (29)
%傅里叶变换 clc;clear all;close all; tic Fs=128;%采样频率,频谱图的最大频率 T=1/Fs;%采样时间,原始信号的时间间隔 L=256;%原始信号的长度,即原始离散信号的点数 t=(0:L-1)*T;%原始信号的时间取值范围 x=7*cos(2*pi*15*t-pi)+3*cos(2*pi*40*t-90*pi/180)+3*cos(2*pi*30*t-90*pi/ 180); z=7*cos(2*pi*15*t-pi)+3*cos(2*pi*40*t-90*pi/180); z1=6*cos(2*pi*30*t-90*pi/180); z1(1:L/2)=0; z=z+z1; y=x;%+randn(size(t)); figure; plot(t,y) title('含噪信号') xlabel('时间(s)') hold on plot(t,z,'r--') N=2^nextpow2(L);%N为使2^N>=L的最小幂 Y=fft(y,N)/N*2; Z=fft(z,N)/N*2;%快速傅里叶变换之后每个点的幅值是直流信号以外的原始信号幅值的N/2倍(是直流信号的N倍) f=Fs/N*(0:N-1);%频谱图的频率取值范围 A=abs(Y);%幅值 A1=abs(Z); B=A; %让很小的数置零. B1=A1; A(A<10^-10)=0; % A1(A1<10^-10)=0; P=angle(Y).*A./B; P1=angle(Z).*A1./B1; P=unwrap(P,pi);%初相位值,以除去了振幅为零时的相位值 P1=unwrap(P1,pi); figure subplot(211) plot(f(1:N/2),A(1:N/2))%函数ffs返回值的数据结构具有对称性,因此只取前一半 hold on plot(f(1:N/2),A1(1:N/2),'r--') title('幅值频谱')
1、 选择()t ?或?()? ω,使{}()k Z t k ?∈-为一组正交归一基; 2、 求n h 。 1,(),()n n h t t ??-= 或??()(2)/()H ω?ω?ω= 3、 由n h 求n g 。 1(1)n n n g h -=- 或()()i G e H t ωωωπ-= 4、 由n g ,()t ?构成正交小波基函数() t φ 1,()()n n t g t φ?-=∑ 或??()(/2)(/2)G φωω?ω= Haar 小波的构造 1)、选择尺度函数。 101 ()0t t ? ≤≤?=? ?其他 易知(n)t ?-关于n 为一正交归一基。 2)、求n h 1,(),()n n h t t ??- =()2t-n)t dt ??( 其中 1 1(2)220n n t t n ?+? ≤≤?-=?? ?其他 当n=0时, 1 1(2)20t t ?? 0≤≤?=?? ?其他 当n=1时,
1 11(21)20t t ?? ≤≤?-=?? ?其他 故,当n=0,n=1时 1()(2)0n n t t n ?? =0,=1 ??-=? ?其他 当n=0时, ()(2)t t n ???-1 120t ? 0≤≤?=?? ?其他 当n=1时, ()(2)t t n ???-1 1120t ? ≤≤?=?? ?其他 故 n h ()2t-n)t dt ?? (1/0n n ?=0,=1 ?=? ??其他 3)、求n g 。 11/0 (1)1/10n n n n g h n -?=??=-=-=?? ??其他 4)、求()t φ。 1,()()n n t g t φ?-=∑ =0-1,011,1()()g t g t ??-+ (2)(21)t t - =1 102 111 20t t ? ≤≤???- ≤≤?? ??? 其他
一、傅立叶变化的原理; (1)原理 正交级数的展开是其理论基础!将一个在时域收敛的函数展开成一系列不同频率谐波的叠加,从而达到解决周期函数问题的目的。在此基础上进行推广,从而可以对一个非周期函数进行时频变换。 从分析的角度看,他是用简单的函数去逼近(或代替)复杂函数,从几何的角度看,它是以一族正交函数为基向量,将函数空间进行正交分解,相应的系数即为坐标。从变幻的角度的看,他建立了周期函数与序列之间的对应关系;而从物理意义上看,他将信号分解为一些列的简谐波的复合,从而建立了频谱理论。 当然Fourier积分建立在傅氏积分基础上,一个函数除了要满足狄氏条件外, 一般来说还要在积分域上绝对可积,才有古典意义下的傅氏变换。引入衰减因子e^(-st),从而有了Laplace变换。(好像走远了)。 (2)计算方法 连续傅里叶变换将平方可积的函数f(t)表示成复指数函数的积分或级数形式。 这是将频率域的函数F(ω)表示为时间域的函数f(t)的积分形式。 为 连续傅里叶变换的逆变换 (inverse Fourier transform) 即将时间域的函数f(t)表示为频率域的函数F(ω)的积分。 一般可称函数f(t)为原函数,而称函数F(ω)为傅里叶变换的像函数,原函数和像函数构成一个傅里叶变换对(transform pair)。 二、傅立叶变换的应用; DFT在诸多多领域中有着重要应用,下面仅是颉取的几个例子。需要指出 的是,所有DFT的实际应用都依赖于计算离散傅里叶变换及其逆变换的快速算
法,即快速傅里叶变换(快速傅里叶变换(即FFT )是计算离散傅里叶变换及其逆变换的快速算法。)。(1)、频谱分析DFT 是连续傅里叶变换的近似。因此可以对连续信号x(t)均匀采样并截断以得到有限长的离散序列,对这一序列作离散傅里叶变换,可以分析连续信号x(t)频谱的性质。前面还提到DFT 应用于频谱分析需要注意的两个问题:即采样可能导致信号混叠和截断信号引起的频谱泄漏。可以通过选择适当的采样频率(见奈奎斯特频率)消减混叠。选择适当的序列长度并加窗可以抑制频谱泄漏。(2)、数据压缩由于人类感官的分辨能力存在极限,因此很多有损压缩算法利用这一点将语音、音频、图像、视频等信号的高频部分除去。高频信号对应于信号的细节,滤除高频信号可以在人类感官可以接受的范围内获得很高的压缩比。这一去除高频分量的处理就是通过离散傅里叶变换完成的。将时域或空域的信号转换到频域,仅储存或传输较低频率上的系数,在解压缩端采用逆变换即可重建信号。(3)、OFDM OFDM (正交频分复用)在宽带无线通信中有重要的应用。这种技术将带宽为N 个等间隔的子载波,可以证明这些子载波相互正交。尤其重要的是,OFDM 调制可以由IDFT 实现,而解调可以由DFT 实现。OFDM 还利用DFT 的移位性质,在每个帧头部加上循环前缀(Cyclic Prefix ),使得只要信道延时小于循环前缀的长度,就能消除信道延时对传输的影响。三、傅里叶变换的本质; 傅里叶变换的公式为dt e t f F t j ?+∞∞--=ωω)()(可以把傅里叶变换也成另外一种形式: t j e t f F ωπ ω),(21)(=可以看出,傅里叶变换的本质是内积,三角函数是完备的正交函数集,不同频率的三 角函数的之间的内积为0,只有频率相等的三角函数做内积时,才不为0。)(2,21)(2121Ω-Ω==?Ω-ΩΩΩπδdt e e e t j t j t j
基于小波图像去噪的MATLAB 实现 一、 论文背景 数字图像处理(Digital Image Processing ,DIP)是指用计算机辅助技术对图像信号进行处理的过程。数字图像处理最早出现于 20世纪50年代,随着过去几十年来计算机、网络技术和通信的快速发展,为信号处理这个学科领域的发展奠定了基础,使得DIP 技术成为信息技术中最重要的学科分支之一。在现实生活中,DIP 应用十分广泛,医疗、艺术、军事、航天等图像处理影响着人类生活和工作的各个方面。 然而,在图像的采集、获取、编码和传输的过程中,都存在不同程度被各种噪声所“污染”的现象。如果图像被污染得比较严重,噪声会变成可见的颗粒形状,导致图像质量的严重下降。根据研究表明,当一图像信噪比(SNR)低于14.2dB 时,图像分割的误检率就高于0.5%,而参数估计的误差高于0.6%。通过一些卓有成效的噪声处理技术后,尽可能地去除图像噪声,我们在从图像中获取信息时就更容易,有利于进一步的对图像进行如特征提取、信号检测和图像压缩等处理。小波变换处理应用于图像去噪外,在其他图像处理领域都有着十分广泛的应用。本论文以小波变换作为分析工具处理图像噪声,研究数字图像的滤波去噪问题,以提高图像质量。 二、 课题原理 1.小波基本原理 在数学上,小波定义为对给定函数局部化的新领域,小波可由一个定义在有限区域的函数()x ψ来构造,()x ψ称为母小波,(mother wavelet )或者叫做基本小波。一组小波基函数,()}{,x b a ψ,可以通过缩放和平移基本小波 来生成:
())(1 ,a b x a x b a -ψ=ψ (1) 其中,a 为进行缩放的缩放参数,反映特定基函数的宽度,b 为进行平移的平移参数,指定沿x 轴平移的位置。当a=2j 和b=ia 的情况下,一维小波基函数序列定义为: ()() 1222,-ψ=ψ--x x j j j i (2) 其中,i 为平移参数,j 为缩放因子,函数f (x )以小波()x ψ为基的连续小波变换定义为函数f (x )和()x b a ,ψ的积: ( )dx a b x a x f f x W b a b a )(1)(,,,-ψ= ψ=?+∞∞- (3) 与时域函数对应,在频域上则有: ())(,ωωa e a x j b a ψ=ψ- (4) 可以看出,当|a|减小时,时域宽度减小,而频域宽度增大,而且()x b a ,ψ的窗口中心向|ω|增大方向移动。这说明连续小波的局部是变化的,在高频时分辨率高,在低频时分辨率低,这便是它优于经典傅里叶变换的地方。总体说来,小波变换具有更好的时频窗口特性。 2. 图像去噪综述 所谓噪声,就是指妨碍人的视觉或相关传感器对图像信息进行理解或分析的各种因素。通常噪声是不可预测的随机信号。由于噪声影响图像的输入、采集、处理以及输出的各个环节,尤其是图像输入、采集中的噪声必然影响图像处理全过程乃至最终结果,因此抑制噪声已成为图像处理中极其重要的一个步骤。 依据噪声对图像的影响,可将噪声分为加性噪声和乘性噪声两大类。由于乘性噪声可以通过变换当加性噪声来处理,因此我们一般重点研究加性噪声。设
目录 用Matlab 对信号进行傅里叶变换 (2) Matlab 的傅里叶变换实例 (5) Matlab 方波傅立叶变换画出频谱图 (7)
用 Matlab 对信号进行傅里叶变换 1. 离散序列的傅里叶变换 DTFT(Discrete Time Fourier Transform) 代码: %原离散信号有 8 点 %原信号是 1行 8列的矩阵 %构建原始信号,为指数信号 %频域共-800 +800 的长度(本应是无穷, 高 %求 dtft 变换,采用原始定义的方法,对复指 7 subplot(311) 8 stem(n,xn); 9 title('原始信号(指数信号 )'); 10 subplot(312); 11 plot(w/pi,abs(X)); 12 title('DTFT 变换 ') 结果: 分析:可见,离散序列的 dtft 变换是周期的,这也符合 Nyquist 采样 定理的描述, 连续时间信号经周期采样之后, 所得的离散信号的频谱 是原连续信号频谱的周期延拓。 2. 离散傅里叶变换 1 N=8; 2 n=[0:1:N-1] 3 xn=0.5.^n; 4 5 w=[-800:1:800]*4*pi/800; 频分量很少,故省去) 6 X=xn*exp(-j*(n'*w)); 数分 量求和而得
与 1 中 DTFT 不一样的是, DTFT 的求和区间是整个频域,这对 N=8; % 原离散信号有 8 点 n=[0:1:N-1] %原信号是 1行 8列的矩阵 xn=0.5.^n; %构建原始信号,为指数信号 w=[-8:1:8]*4*pi/8; %频域共 -800 +800 的长度(本应是无穷, 高频分量很少, 故省去) X=xn*exp(-j*(n'*w)); %求 dtft 变换,采用原始定义的方法,对复指数分量求和而得 subplot(311) stem(n,xn); w1=[-4:1:4]*4*pi/4; X1=xn*exp(-j*(n'*w1)); title(' 原始信号 (指数信号 )'); subplot(312); stem(w/pi,abs(X)); title(' 原信号的 16 点 DFT 变换 ') subplot(313) stem(w1/pi,abs(X1)); title(' 原信号的 8 点 DFT 变换 ') 计算机的计算来说是不可以实现的, DFT 就是序列的有限傅里叶变换。 实际上, 1 中代码也只是对频域的 -800 +800 中间的 1601 结果图: 分析: DFT 只是 DTFT 的现实版本,因为 DTFT 要求求和区间无穷, 而 DFT 只在有限点内求和。 3. 快速傅里叶变换 FFT ( Fast Fourier Transform ) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
H a r b i n I n s t i t u t e o f T e c h n o l o g y 图像工程导论 课程名称:图像工程导论 设计题目:《图像检测:直线提取》院系: 班级: 设计者: 学号: 哈尔滨工业大学教务处 图像工程导论任务书 二〇一五年柒月哈尔滨工业大学
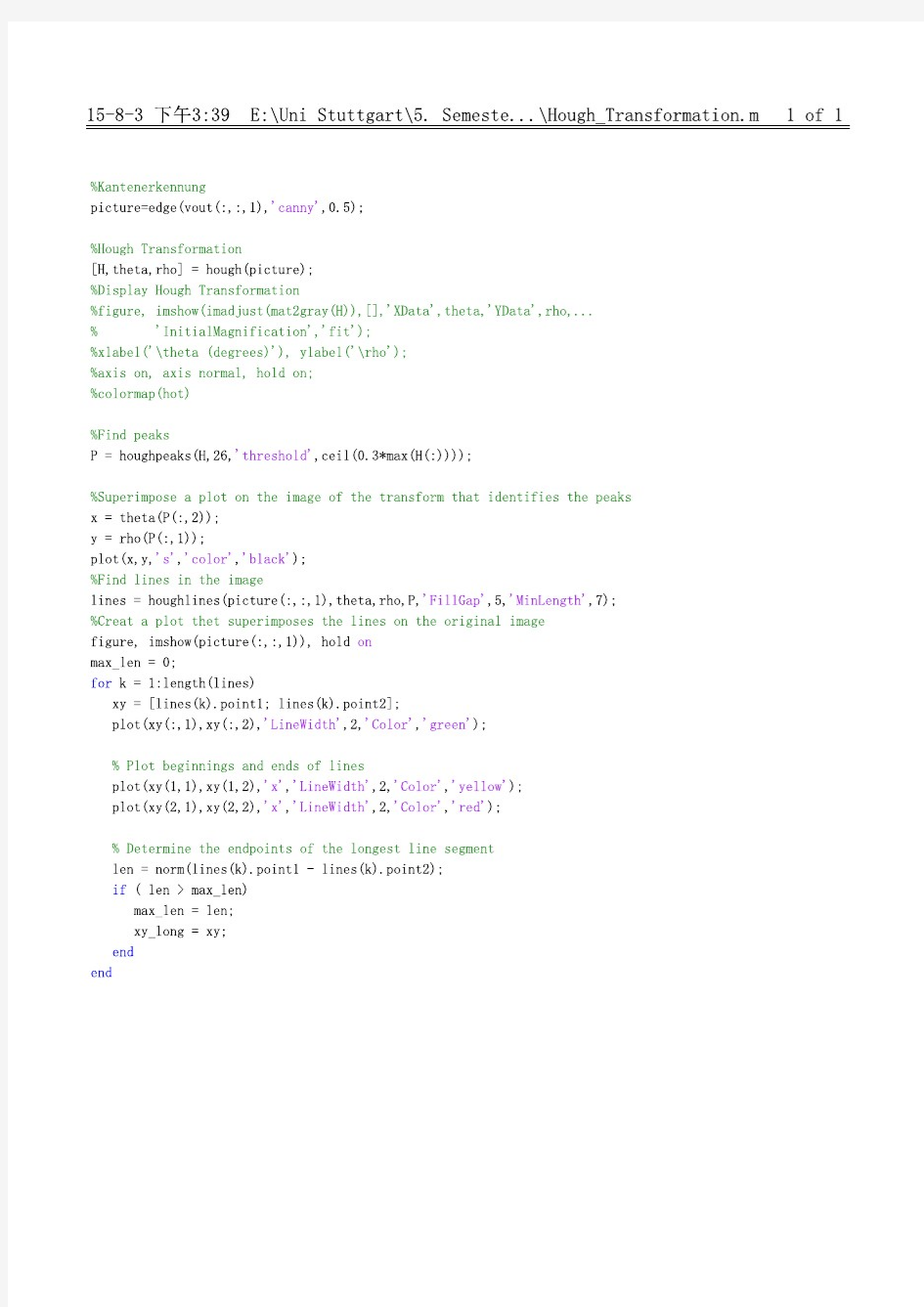
一、课题详细描述: 提取图像中所有长度>8,<80像素的水平、垂直和对角直线。 二、课题设计思路: 读取图片后将其转化为灰度图后记为二值图像,对其进行边缘检测后通过霍夫变换检测直线,并将符合像素要求的水平、垂直和对角直线绘制在屏幕上。 三、代码清单及注释 x=imread('D:2.jpg');%读取图片 BW=rgb2gray(x);%转化为灰度图 imshow(BW); thresh=[0.01,0.17]; sigma=2; %定义高斯参数 f=edge(double(BW),'canny',thresh,sigma);%canny边缘检测 figure,imshow(f); [H,T,R]=hough(f,'ThetaResolution',89,'RhoResolution',10); %霍夫变换 P=houghpeaks(H,400,'Threshold',80,'NHoodSize',[1,1]); lines=houghlines(f,T,R,P,'FillGap',1,'Minlength',8); for k = 1:length(lines) xy = [lines(k).point1; lines(k).point2]; len = norm(lines(k).point1 - lines(k).point2); Len(k)=len if ( len > 8& len < 80) %限定像素范围 plot(xy(:,1),-xy(:,2),'LineWidth',2,'color','Red'); %绘制图像 hold on;
陕西科技大学实验报告 班级信工142 学号22 姓名何岩实验组别实验日期室温报告日期成绩报告内容:(目的和要求,原理,步骤,数据,计算,小结等) 1.求信号的离散时间傅立叶变换并分析其周期性和对称性; 给定正弦信号x(t)=2*cos(2*pi*10*t),fs=100HZ,求其DTFT。 (a)代码: f=10;T=1/f;w=-10:0.2:10; t1=0:0.0001:1;t2=0:0.01:1; n1=-2;n2=8;n0=0;n=n1:0.01:n2; x5=[n>=0.01]; x1=2*cos(2*f*pi*t1); x2=2*cos(2*f*pi*t2); x3=(exp(-j).^(t2'*w)); x4=x2*x3; subplot(2,2,1);plot(t1,x1); axis([0 1 1.1*min(x2) 1.1*max(x2)]); xlabel('x(n)');ylabel('x(n)'); title('原信号x1'); xlabel('t');ylabel('x1'); subplot(2,2,3);stem(t2,x2); axis([0 1 1.1*min(x2) 1.1*max(x2)]); title('原信号采样结果x2'); xlabel('t');ylabel('x2'); subplot(2,2,2);stem(n,x5); axis([0 1 1.1*min(x5) 1.1*max(x5)]); xlabel('n');ylabel('x2'); title('采样函数x2'); subplot(2,2,4);stem(t2,x4); axis([0 1 -0.2+1.1*min(x4) 1.1*max(x4)]); xlabel('t');ylabel('x4'); title('DTFT结果x4'); (b)结果:
基于机器视觉的工业机器人工件搬运技术研究 1.1研究背景 自 19 世纪 60 年代问世以来,工业机器人不断发展和完善,现已得到广泛应用,机器人产业也逐渐成熟[]1。目前,全世界已拥有 100 多万台工业机器人广泛应用在焊接、搬运、装配、喷涂、修边、拾料、包装、堆垛和上下料等单调或复杂的作业中,为企业节约了大量的劳动成本,大大提高了劳动生产率。工业机器人是面向工业领域的多关节机械手或多自由度的机器人,它在稳定产品品质、提高生产效率和改善劳动条件等方面有着十分重要的作用,它的应用能够使企业大大缩短新产品的换产周期和节约劳动成本,从而提高了产品的市场竞争力[]23-。 随着当代工业革命深入发展,工业生产日益趋向自动化,工业机器人技术也正朝着智能、柔性的方向发展。许多发达国家对于智能工业机器人的研究都较为重视,我国也早已将其纳入国家高科技发展规划。国家层面的重视也必将给工业机器人技术带来新的跨越式发展,机器人的发展也必将对社会经济和生产力的发产生更加深远的影响 1.2 研究目的和意义 对于工作在自动化生产线上或柔性制造系统中的工业机器人来说,其完成最多的一类操作是“抓取—放置”动作,比如流水线上的工件搬运、装配以及各工位之间的工件转移和上下料。机器人要完成这类操作是经过复杂计算的:首先,机器人必须知道怎么抓,其次机器人应该知道怎么放;同时在这个过程还要伴随着机器人运动学分析的过程。传统的工业机器人完成这类操作,必须经过精确的逐点示教后,才能一步一步的按照固定程序执行。在这个过程中,工件相对于机器人的初始位姿(位置和姿态)和终止位姿是事先规定的,但很多情况下,特别是流水线场合,工件的位姿常常是不固定的。这就导致实际目标工件的位姿与理想工件位姿总是有偏差的,这种偏差哪怕很小都会导致机器人操作任务的失败。这种由于环境的变化而导致机器人不能很好地完成任务的情况极大地限制了机器人的实际应用。这就要求工业机器人具备一定的环境适应能力,即工业机器人智能化。智能工业机器人的智能特征在于它具有与外部世界、对象、环境和人相互协调的工作机能,具体表现在机器视觉、接近
基于Matlab的离散小波变换 lyqmath https://www.doczj.com/doc/71114443.html,/lyqmath 目录 基于Matlab的离散小波变换 (1) 简介 (1) 实例 (2) 结果 (2) 总结 (2) 简介 在数字图像处理中,需要将连续的小波及其小波变换离散化。一般计算机实现中使用二进制离散处理,将经过这种离散化的小波及其相应的小波变换成为离散小波变换(简称DWT)。实际上,离散小波变换是对连续小波变换的尺度、位移按照2的幂次进行离散化得到的,所以也称之为二进制小波变换。 虽然经典的傅里叶变换可以反映出信号的整体内涵,但表现形式往往不够直观,并且噪声会使得信号频谱复杂化。在信号处理领域一直都是使用一族带通滤波器将信号分解为不同频率分量,即将信号f(x)送到带通滤波器族Hi(x)中。 小波分解的意义就在于能够在不同尺度上对信号进行分解,而且对不同尺度的选择可以根据不同的目标来确定。 对于许多信号,低频成分相当重要,它常常蕴含着信号的特征,而高频成分则给出信号的细节或差别。人的话音如果去掉高频成分,听起来与以前可能不同,但仍能知道所说的内容;如果去掉足够的低频成分,则听到的是一些没有意义的声音。在小波分析中经常用到近似与细节。近似表示信号的高尺度,即低频信息;细节表示信号的高尺度,即高频信息。因此,原始信号通过两个相互滤波器产生两个信号。 通过不断的分解过程,将近似信号连续分解,就可以将信号分解成许多低分辨率成分。理论上分解可以无限制的进行下去,但事实上,分解可以进行到细节(高频)只包含单个样本为止。因此,在实际应用中,一般依据信号的特征或者合适的标准来选择适当的分解层数。
1 利用FFT 计算连续时间信号的傅里叶变换 设()x t 是连续时间信号,并假设0t <时()0x t =,则其傅里叶变换由下式给出 0()()i t X x t e dt ωω∞ -=? 令Γ是一个固定的正实数,N 是一个固定的正整数。当,0,1,2,,1k k N ω=Γ=-L 时,利用FFT 算法可计算()X ω。 已知一个固定的时间间隔T ,选择T 足够小,使得每一个T 秒的间隔(1)nT t n T ≤<+内,()x t 的变化很小,则式中积分可近似为 (1)0 ()()()n T iwt nT n X e dt x nT ω∞+-==∑? (1)01[ ]()i t t n T t nT n e x nT i ωω ∞-=+==-=∑ 0 1()i T i nT n e e x nT i ωωω-∞-=-=∑ (27) 假设N 足够大,对于所有n N ≥的整数,幅值()x nT 很小,则式(27)变为 1 01()()i T N i nT n e X e x nT i ωωωω---=-=∑ (28) 当2/k NT ωπ=时,式(28)两边的值为 2/2/12/0211()()[]2/2/i k N i k N N i nk N n k e e X e x nT X k NT i k NT i k NT ππππππ----=--==∑ (29) 其中[]X k 代表抽样信号[]()x n x nT =的N 点DFT 。最后令2/NT πΓ=,则上式变为 2/1()[]0,1,2,,12/i k N e X k X k k N i k NT ππ--Γ==-L (30) 首先用FFT 算法求出[]X k ,然后可用上式求出0,1,2,,1k N =-L 时的()X k Γ。 应该强调的是,式(28)只是一个近似表示,计算得到的()X ω只是一个近似值。通过取更小的抽样间隔T ,或者增加点数N ,可以得到更精确的值。如果B ω>时,幅度谱()X ω很小,对应于奈奎斯特抽样频率2s B ω=,抽样间隔T 选择/B π比较合适。如果已知信号只在时间区间10t t ≤≤内存在,可以通过对1nT t >时的抽样信号[]()x n x nT =补零,使N 足够大。 例1 利用FFT 计算傅里叶变换
基于matlab的霍夫变换 一、简单介绍 Hough变换是图像处理中从图像中识别几何形状的基本方法之一。Hough变换的基本原理在于利用点与线的对偶性,将原始图像空间的给定的曲线通过曲线表达形式变为参数空间的一个点。这样就把原始图像中给定曲线的检测问题转化为寻找参数空间中的峰值问题。也即把检测整体特性转化为检测局部特性。比如直线、椭圆、圆、弧线等。 二、基本原理 Hough变换的基本原理在于,利用点与线的对偶性,将图像空间的线条变为参数空间的聚集点,从而检测给定图像是否存在给定性质的曲线(圆的方程为:(x-a)^2+(y-b)^2=r^2,通过Hough变换,将图像空间对应到参数空间)。 霍夫变换是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进算法。最基本的霍夫变换是从黑白图像中检测直线(线段)。 三、hough变换检测直线 设已知一黑白图像上画了一条直线,要求出这条直线所在的位置。我们知道,直线的方程可以用y=k*x+b 来表示,其中k和b是参数,分别是斜率和截距。过某一点(x0,y0)的所有直线的参数都会满足方程y0=kx0+b。即点 (x0,y0)确定了一族直线。方程y0=kx0+b在参数k--b平面上是一条直线,(你也可以是方程b=-x0*k+y0对应的直线)。如下图1所示: 从图1中可看出,x-y坐标和k-b坐标有点----线的对偶性。x-y坐标中的点P1、P2对应于k-b坐标中的L1、L2;而k-b坐标中的点P0对应于x-y坐标中的线L0 。 这样,图像x--y平面上的一个前景像素点就对应到参数平面上的一条直线。我们举个例子说明解决前面那个问题的原理。设图像上的直线是y=x, 我
航空航天大学基于Matlab的脑电信号处理 陆想想 专业领域生物医学工程 课程名称数字信号处理
二О一三年四月
摘要:脑电信号属于非平稳随机信号,且易受到各种噪声干扰。本文基于Matlab仿真系统,主要研究了小波变换在脑电信号处理方面的应用,包括小波变换自动阈值去噪处理、强制去噪处理,以α波为例,提取小波分解得到的各层频率段的信号,并做了一定的分析和评价。关键词:脑电信号;小波变换;去噪重构;频谱分析 0 引言 脑电信号EEG(Electroencephalograph)是人体一种基本生理信号,蕴涵着丰富的生理、心理及病理信息,脑电信号的分析及处理无论是在临床上对一些脑疾病的诊断和治疗,还是在脑认知科学研究领域都是十分重要的。由于脑电信号的非平稳性且极易受到各种噪声干扰,特别是工频干扰。因此消除原始脑电数据中的噪声,更好地获取反映大脑活动和状态的有用信息是进行脑电分析的一个重要前提。本文的研究目的是利用脑电采集仪器获得的脑电信号,利用Fourier变换、小波变换等方法对脑电信号进行分析处理,以提取脑电信号α波的“梭形”节律,并对脑电信号进行功率谱分析和去噪重构。 1 实验原理和方法 1.1实验原理 1.1.1脑电信号 根据频率和振幅的不同,可以将脑电波分为4种基本类型[1],即δ波、θ波、α波、β波。4种波形的起源和功能也不相同,如图1所示。 图1 脑电图的四种基本波形 α波的频率为8~13Hz,振幅为为20~100μV,它是节律性脑电波中最明显的波,整个皮层均可产生α波。正常成人在清醒、安静、闭目时,波幅呈现有小变大,再由大变小,如此反复进行,形成所谓α节律的“梭形”。每一“梭形”持续时间约为1~2s。当被试者睁眼、警觉、思考问题或接受其他刺激时,α波立即消失而代之以快波,这种现象称之为
霍夫变换
标准霍夫变换 1.C++: void HoughLines(InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn=0, double stn=0 ) 第一个参数,InputArray类型的image,输入图像,即源图像,需为8位的单通道二进制图像,可以将任意的源图载入进来后由函数修改成此格式后,再填在这里。 第二个参数,InputArray类型的lines,经过调用HoughLines函数后储存了霍夫线变换检测到线条的输出矢量。每一条线由具有两个元素的矢量表示,其中,是离坐标原点((0,0)(也就是图像的左上角)的距离。是弧度线条旋转角度(0~垂直线,π/2~水平线)。 第三个参数,double类型的rho,以像素为单位的距离精度。另一种形容方式是直线搜索时的进步尺寸的单位半径。PS:Latex中/rho就表示。 第四个参数,double类型的theta,以弧度为单位的角度精度。另一种形容方式是直线搜索时的进步尺寸的单位角度。 第五个参数,int类型的threshold,累加平面的阈值参数,即识别某部分为图中的一条直线时它在累加平面中必须达到的值。大于阈值threshold的线段才可以被检测通过并返回到结果中。 第六个参数,double类型的srn,有默认值0。对于多尺度的霍夫变换,这是第三个参数进步尺寸rho的除数距离。粗略的累加器进步尺寸直接是第三个参数rho,而精确的累加器进步尺寸为rho/srn。 第七个参数,double类型的stn,有默认值0,对于多尺度霍夫变换,srn表示第四个参数进步尺寸的单位角度theta的除数距离。且如果srn和stn同时为0,