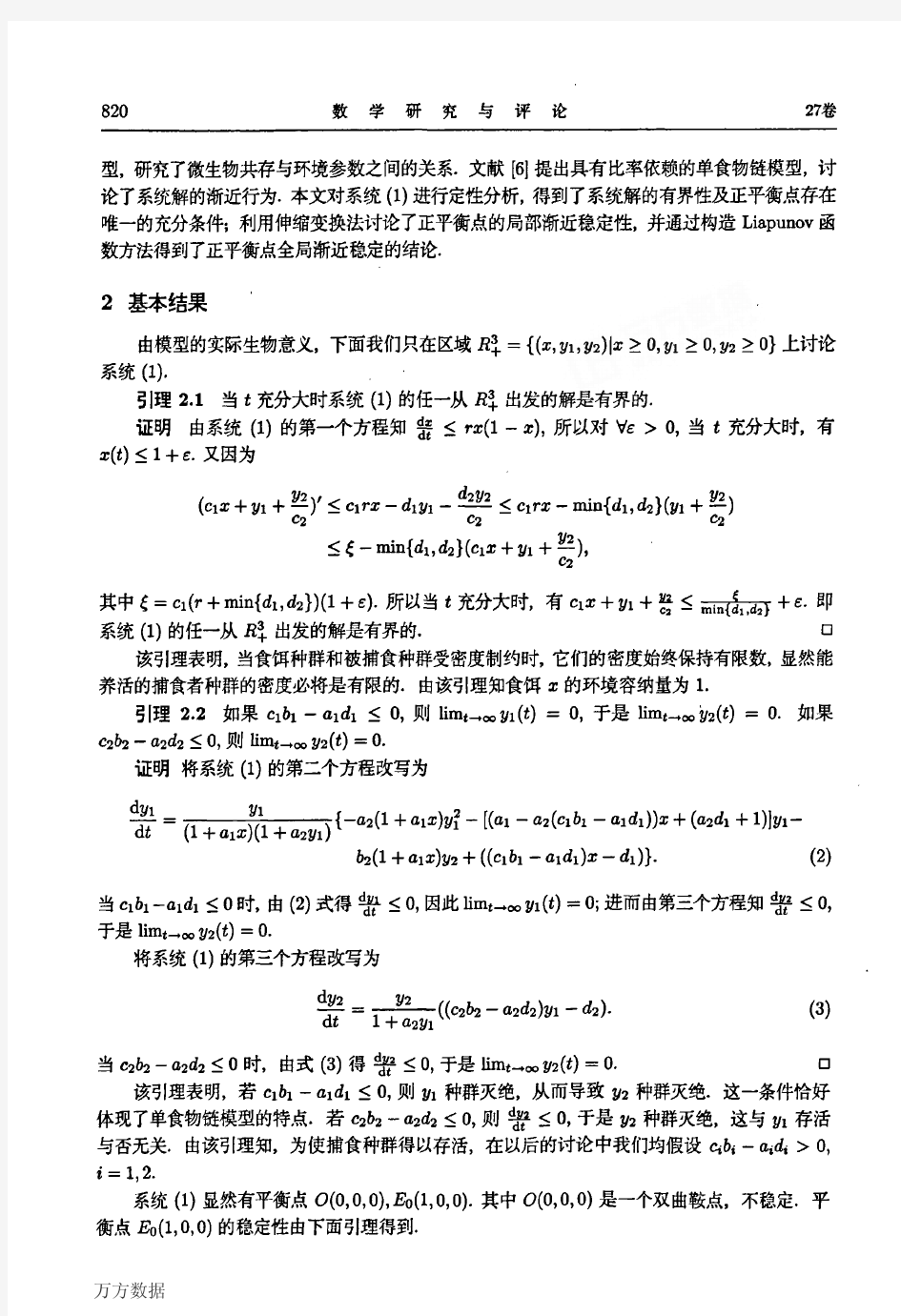
关于浮体的平衡与稳定性)1 谢建华 (西南交通大学牵引动力国家重点实验室) 摘要:本文讨论了浮体的平衡与稳定问题,介绍了定倾中心的定义,并结合一个具体的例子,给出了定倾高度的三种不同的计算方法,最后,根据能量方法说明了用定倾高度判定浮体稳定性的理论依据。 关键词:浮体;平衡;稳定性 浮体的平衡与稳定问题研究是一个非常有实际意义的课题,是船舶与海洋平台设计的理论基础,在其它工程中也有广泛的应用。在浮体稳定性研究中,定倾中心是一个重要的概念,但是,笔者认为有一些教科书或文献对此概念的定义是不够明确的,例如,有的认为,当船 体发生微小摇晃时浮力的作用线交对称轴线(浮轴)于一定点,此点即为定倾中心]2[],1[,也有的认为实验表明前述两直线交于一点]3[。另外,在用力系简化方法推导定倾高度的过程中也有含糊不清之处]1[,或在稳定性判定上发生错误]4[。笔者带着这些疑问查阅了若干 参考书,特别是[5]、[6]和[7]。根据这些材料,本文介绍了定倾中心的明确定义,并结合一个具体的例子,给出了定倾高度三种不同的计算方法,最后,根据能量方法说明了用定倾高度判定浮体稳定性的理论依据。 如果物体的比重比水小,物体在水中漂浮平衡时,有一部分将露出水面,这样的物体称为浮体。浮体要满足以下两个条件才能平衡:(i) 受水的浮力等于浮体的重量;(ii)浮心(浮力的作用点)与浮体重心的连线和水平面垂直,如图1(a)所示。浮体平衡位置还要满足稳定性条件才能具体实现。图1(b)表示一个长方形物块平躺和竖立平衡位置发生了微小的扰动,其中,左边的物块上作用的重力和浮力阻碍了物块进一步偏离其平衡位置,因此平衡是稳定,而右边的物块则相反,其上作用的重力和浮力加剧了偏离其平衡位置,平衡是不稳定。以下来分析浮体平衡和稳定的条件。 图1 浮体的平衡 假设浮体有一个对称面,平衡位置发生扰动时,浮体上各点的位移均平行于对称面,浮体作平面运动。容易说明浮体对铅直和水平扰动是稳定的,仅需考虑浮体对转动方向扰动的稳定性问题。平衡时,浮体与水平面的交面称浮面,记为S。先建立一个与浮体固连的坐标 )1国家自然科学基金资助项目(10772151)
第30卷第2期 纺织高校基础科学学报V o l .30,N o .2 2017年6月B A S I CS C I E N C E S J O U R N A LO FT E X T I L EU N I V E R S I T I E S J u n .,2017 文章编号:1006-8341(2017)02-0163-08D O I :10.13338/j .i s s n .1006-8341.2017.02.002 收稿日期:2017-03-02 基金项目:国家自然科学基金资助项目(11101323);中央高校教育教学改革专项经费资助项目(310612176301);陕西省教育厅专项科研计划项目(16J K 1331) 通讯作者:刘俊利(1981 ),女,河南省濮阳县人,西安工程大学副教授,博士,研究方向为传染病动力学.E -m a i l :j l l i u 2008@126.c o m 引文格式:刘文娟,刘俊利.伪狂犬病模型的全局稳定性分析[J ].纺织高校基础科学学报,2017,30(2):163-170. L I U W e n j u a n ,L I UJ u n l i .G l o b a l s t a b i l i t y a n a l y s i so f a p s e u d o r a b i e sv i r u sm o d e l [J ].B a s i cS c i e n c e s J o u r n a l o f T e x t i l eU n i v e r s i t i e s ,2017,30(2):163-170.伪狂犬病模型的全局稳定性分析 刘文娟,刘俊利 (西安工程大学理学院,陕西西安710048 )摘要:建立一类伪狂犬病模型并研究其动力学行为,寻求决定疾病绝灭与否的基本再生数.当基本再生数小于1时,模型仅有唯一的无病平衡点,利用线性化方法和L i a p u n o v 函数方法,讨论无病平衡点的全局渐近稳定性.当基本再生数大于1时,无病平衡点不稳定,模型还存在唯一的正平衡点,模型是一致持久的,通过线性化方法和几何方法证明了正平衡点的全局渐近稳定性.关键词:伪狂犬病;基本再生数;全局稳定性;L i a p u n o v 函数中图分类号:O175.1 文献标识码:A G l o b a l s t a b i l i t y a n a l y s i s o f a p s e u d o r a b i e s v i r u sm o d e l L I U W e n j u a n ,L I UJ u n l i (S c h o o l o f S c i e n c e ,X i 'a nP o l y t e c h n i cU n i v e r s i t y ,X i 'a n710048,C h i n a )A b s t r a c t :A p s e u d o r a b i e sv i r u sm o d e l i se s t a b l i s h e d ,a n d i t sd y n a m i c s i ss t u d i e dt oo b t a i nt h e b a s i cr e p r o d u c t i o n n u m b e r w h i c h d e t e r m i n e st h ee x t i n c t i o na n d p e r s i s t e n c eo ft h ed i s e a s e .W h e n t h eb a s i c r e p r o d u c t i o nn u m b e r i s l e s s t h a nu n i t y ,t h e r e i s o n l y t h e d i s e a s e -f r e e e q u i l i b r i -u m ,b y t h e l i n e a r i z a t i o n a n dL i a p u n o v f u n c t i o nm e t h o d s ,t h e g l o b a l s t a b i l i t y o f t h e d i s e a s e -f r e e e q u i l i b r i u mi sd i s c u s s e d .W h e nt h eb a s i c r e p r o d u c t i o nn u m b e r i s g r e a t e r t h a nu n i t y ,t h ed i s -e a s e -f r e e e q u i l i b r i u mi s u n s t a b l e ,t h e r e i s a l s oo n e u n i q u e p o s i t i v e e q u i l i b r i u m.T h e g l o b a l s t a -b i l i t y o f t h e p o s i t i v e e q u i l i b r i u mi s p r o v e db y l i n e a r i z a t i o na n d g e o m e t r i cm e t h o d s .K e y w o r d s :p s e u d o r a b i e s v i r u s ;b a s i c r e p r o d u c t i o nn u m b e r ;g l o b a l s t a b i l i t y ;L i a p u n o v f u n c t i o n 0 引 言 伪狂犬病(P R ),是由伪狂犬病病毒(P R V )引起的多种家禽和野生动物以发热二奇痒二昏睡二共济失调等为主要症状的一种急性传染病.P R V 属疱疹病毒科,该病最早(1813年)发现于美国,1902年由匈牙利万方数据
摘要 本文给出了微分方程稳定性的概念,并举了一些例子来说明不同稳定性定义之间的区别和联系。这些例子都是通过求出方程解析解的方法来讨论零解是否稳定。在实际问题中提出的微分方程往往是很复杂的,无法求出其解析解,这就需要我们从方程本身来判断零解的稳定性。所以我们讨论了通过Liapunov稳定性定理来判断自治系统零解的稳定性,并用类似的方法讨论了非自治系统零解的稳定性。在此基础上,讨论了一阶和二阶微分方程的平衡点及其稳定性,这对其研究数学建模的稳定性模型起到很大的作用,并且利用相关的差分方程的全局吸引性研究了具时滞的单种群模型 ()()()() () .1 1N t N t r t N t cN t ττ -- = -- 的平衡点1 x=的全局吸引性,所获结果改进了文献中相关的结论。关键词:自治系统平衡点稳定性全局吸引性
Abstract In this paper,we gived the conceptions of differential equation stability. Simultaneously a number of examples to illustrate the difference between the definition of different stability and contact. These examples are obtained by analytical solution equation method to discuss the stability of zero solution. Practical issues raised in the often very complicated differential equations, analytical solution can not be obtained, which requires us to determine from the equation itself, the stability of zero solution. So we discussed the stability theorem to determine through the stability of zero solution of autonomous systems, and use similar methods to discuss the non-zero solution of autonomous system stability. On this basis,we discuss a step and the second-step and the stability, which plays the major role to its stability of the model, and the global attractivity of the positive equilibrium 1 x=of the following delay single population model ()()()() () .1 1N t N t r t N t cN t ττ -- = -- is investigated by using the corresponding result related to a difference equation.The obtained results improve some known results in the literature. Key Words:autonomous system;equilibrium point;stability;delay;globally asymptotic stability;global attractivity
重心位置与物体平衡的关系 一个物体受到重力的作用,从效果上看,我们可以认为各部分受到的重力作用集中于一点,这一点叫物体的重心。重心相当于是物体各个部分所受重力的等效作用点。重心的位置一方面取决于物体的几何形状,另一方面取决于物体的质量分布情况。 物体的平衡问题是物理学中一大类问题,物体在重力和支持力下的平衡又可分为稳定平衡、不稳定平衡和随遇平衡三个类型。物体稍微偏离平衡位置,如果重心升高,就是稳定平衡;如果重心降低,就是不稳定平衡;如果重心的位置不变,就是随遇平衡。 从物理学的角度来看,重心的位置和物体的平衡之间有着密切联系,主要体现在两个方面: (1)物体的重心在竖直方向的投影只有落在物体的支撑面内或支撑点上,物体才可能保持平衡。 (2)物体的重心位置越低,物体的稳定程度越高。 对于重心位置和平衡的关系我们可以举出如下熟知的例子: 类型1:不倒瓮为什么不倒?如图1,有趣的不倒翁,不论你怎么使劲推,它都不会翻倒。甚至你把它横过来放,一松手,不倒翁又会站在你面前。这是怎么回事呢?一方面因为它上轻下重,底部有一个较重的铁块,所以重心很低;另一方面,不倒翁的底面大而圆滑,当它向一边倾斜时,它的重心和桌面的接触点不在同一条铅垂线上,重力作用会使它向另外一边摆动。比如,当不倒翁向左倒时,重心和重力作用线在接触点的右边,在重力作用下,不倒翁就又向右倒。当倒向右边时,重心和重力作用线又跑到接触点左边,迫使不倒翁再向左倒。不倒翁就是这样摆过来,又摆过去,直到因为摩擦和空气阻力,能量逐渐损失,减少到零。重力作用线此时恰好通过接触点,它才不会继续摆动。 类型2:来看一个不可思议的平衡表演. 将一把小折刀打开一半,把刀尖插进一支铅笔的一侧,距笔尖约2厘米。将笔尖放在手指头上,铅笔会稳稳地站立着。稍稍调整一下小刀的开合度,把笔尖放在任何物体上,你会发现,铅笔都不会倾倒。这是因为铅笔和小刀组成的系统,其总重心在笔尖支撑点以下的缘故,其道理和不倒翁有些相似. 类型3:一块水平放置的砖头,不论雨打风吹,总是稳稳地呆在原地。如果把它竖起来,一有风吹草动它就可能翻倒。这是因为砖头平放时,重心很低,接触地面的面积又很大,因此导致它的重心较低,不容易翻倒。其他物体也是这样,如果你到过工厂,会发现许多机器设备的机座都比较大,也很沉,目的就是防止机器翻倒,增加机器的稳定性。往车或船上装货物时,要先把重的东西放在底部。因为这样一来,整个车或船的重心较低,可以保证行驶
运用平衡判据探讨系统的平衡稳定性条件 The Standardization Office was revised on the afternoon of December 13, 2020
本科毕业论文(设计)题目:运用平衡判据探讨系统的平衡稳定性条件 系(部) 学科门类 专业 学号 姓名 指导教师 职称 年月日
运用平衡判据探讨系统的平衡稳定性条件 摘要 熵判据是讨论热力学系统是否处于平衡态的最基本判据,但在实际热力学过程中可 以引入其它判据进行讨论。本文探讨了系统在熵和体积不变时,由内能判据出发,再结 合雅克比行列式,详细推证了平衡稳定性条件。该方法条理清楚,步骤简明,便于理解。 关键词:熵判据内能判据雅克比行列式平衡稳定性条件 ABSTRACT Entropy criterion is the most basic criterion in discussing the equilibrium state of thermodynamic system, but we can introduce other criterion for discussion in the actual thermodynamic process. This essay discusses the requirement for a system to reach a equilibrium stability in detail. The discussion is in condition of constant entropy and volume, and on the basis of the internal energy criterion and the Jacobian. This method is clear, concise, and easy to master. Key words: entropy criterion internal energy criterion Jacobian the equilibrium stability condition
物体平衡的稳定性 【教学课题】 物体平衡的稳定性 【教学目标】 1.知识与能力 ?掌握物体的受力分析、平衡条件及物体平衡的种类 2.过程与方法 ?能用刚体的平衡条件分析物体的平衡 3.情感态度与价值观 ?培养耐心细致的工作作风和严肃认真的科学态度 【教学安排】 2课时 【教学重难点】 重点: 掌握物体平衡的种类,稳定性的概念 难点: 能正确运用平衡条件求解静力学问题 【教学方法】 讲练结合、总结归纳 【教学用具】 投影仪、投影片 【主要内容】 一、平衡的种类 钢丝上的杂技演员、儿童玩的不倒翁都是在重力和支持力的作用下处于平衡状态,但是钢丝上的演员稍有不慎就会摔下来,不倒翁扳倒后却会自动立起来。可见,平衡也是有区别的。那么平衡有哪些种类呢?
如果照图1.6-3(a)那样,把木条一端的小孔套在水平轴O上,把木条从平衡位置稍微移开一些,重心C的位置升高,重力对轴O的力矩就会使它回到原来的平衡位置,这种平衡叫做稳定平衡(stable equilibrium)。 图1.6-3(a)图1.6-3(b) 如果照图1.6-3(b)那样,使木条的重心恰好在水平轴的正上方,木条处于平衡状态。把木条从平衡位置稍微移开一点,重心C的位置降低,重力对轴O的力矩就会使它继续远离平衡位置,这种平衡叫做不稳定平衡(unstable equilibrium)。 如果照图1.6-3(b)那样,把木条重心C处的小孔套在轴O上,这时无论你把木条放在什么位置,它都能保持平衡。这是因为无论木条处在什么位置,重心C的位置都没有改变,重力对轴O的力矩始终为零的缘故。这种平衡叫做随遇平衡(indifferent equilibrium)。
本文给出了微分方程稳定性的概念,并举了一些例子来说明不同稳定性定义之间的区别和联系。这些例子都是通过求出方程解析解的方法来讨论零解是否稳定。在实际问题中提出的微分方程往往是很复杂的,无法求出其解析解,这就需要我们从方程本身来判断零解的稳定性。所以我们讨论了通过Liapunov稳定性定理来判断自治系统零解的稳定性,并用类似的方法讨论了非自治系统零解的稳定性。在此基础上,讨论了一阶和二阶微分方程的平衡点及其稳定性,这对其研究数学建模的稳定性模型起到很大的作用,并且利用相关的差分方程的全局吸引性研究了具时滞的单种群模型 ()()()() () .1 1N t N t r t N t cN t ττ -- = -- 的平衡点1 x=的全局吸引性,所获结果改进了文献中相关的结论。 关键词:自治系统平衡点稳定性全局吸引性 Abstract In this paper,we gived the conceptions of differential equation stability. Simultaneously a number of examples to illustrate the difference between the definition of different stability and contact. These examples are obtained by analytical solution equation method to discuss the stability of zero solution. Practical issues raised in the often very complicated differential equations, analytical solution can not be obtained, which requires us to determine from the equation itself, the stability of zero solution. So we discussed the stability theorem to determine through the stability of zero solution of autonomous systems, and use similar methods to discuss the non-zero solution of autonomous system stability. On this basis,we discuss a step and the second-step and the stability, which plays the major role to its stability of the model, and the global attractivity of the positive equilibrium 1 x=of the following delay single population model ()()()() () .1 1N t N t r t N t cN t ττ -- = -- is investigated by using the corresponding result related to a difference equation.The obtained results improve some known results in the literature. Key Words:autonomous system;equilibrium point;stability;delay;globally asymptotic stability;global attractivity
第四章物体的平衡 §4.2 平衡的稳定性 【学习目标】 1.知道稳定平衡、不稳定平衡和随遇平衡; 2.了解三类平衡从动力学角度来看有什么区别; 3.知道稳度,体会增加稳度在实际生活中的重要意义。 4.通过让学生举例,培养信息收集和处理能力,分析、解决问题能力和交流、 合作能力。 【问题导学】 在前面的学习中,我们学习了有关共点力的平衡问题,我们知道了共点力平衡的 条件是共点力的合力为零。那么是不是自然界中的所有的平衡现象都如共点力作 用一样呢?为什么比萨斜塔每年都在倾斜却总也不倒呢?为什么双层公交车比 正常的公交车车底看起来要低呢?通过这节课的学习,希望同学们能给我以合理 的解释,好,我们进入这节课的学习研究,平衡的稳定性。 【合作探究】 一、平衡的分类 1、平衡的定义 [讨论交流] 准备一段视频录像(走钢丝杂技表演),让学生结合录像和书上的讨论交流,观 察这几个平衡与以前有什么不同,这三个平衡之间有什么不同?(把问题写在黑 板) 问题1:这三种平衡状态下,物体所受的力是共点力吗?(不是,向下的重力与 向上的绳的作用力不相交,重力作用于重心,绳对人的作用力不止一个点,如人 的两只脚、车的两个轮) 问题2:他们是否可以看做质点?(不可以,人体的姿势、形态对人体受力的有 影响,也使重心位置变化) 学生总结:此时物体不能看做质点又处于平衡状态,与我们以前学过的平衡发生 了变化,概念要发生变化,平衡条件也要发生变化,所以我们要考虑它们的另一 特性:平衡的稳定性。 问题3:我们换一种研究问题的方法,先观察这三个平衡的特点:第一个人受到 微小扰动而偏离平衡位置时,不能回到原先的状态,我们称之为不稳定平衡;第
微分方程平衡点及其稳定性理论 这里简单介绍下面将要用到的有关内容: 一、 一阶方程的平衡点及稳定性 设有微分方程 ()dx f x dt = (1) 右端不显含自变量t ,代数方程 ()0f x = (2) 的实根0x x =称为方程(1)的平衡点(或奇点),它也是方程(1)的解(奇解) 如果从所有可能的初始条件出发,方程(1)的解()x t 都满足 0lim ()t x t x →∞ = (3) 则称平衡点0x 是稳定的(稳定性理论中称渐近稳定);否则,称0x 是不稳定的(不渐近稳定)。 判断平衡点0x 是否稳定通常有两种方法,利用定义即(3)式称间接法,不求方程(1)的解()x t ,因而不利用(3)式的方法称直接法,下面介绍直接法。 将()f x 在0x 做泰勒展开,只取一次项,则方程(1)近似为: 0'()()dx f x x x dt =- (4) (4)称为(1)的近似线性方程。0x 也是(4)的平衡点。关于平衡点0x 的稳定性有如下的结论: 若0'()0f x <,则0x 是方程(1)、(4)的稳定的平衡点。 若0'()0f x >,则0x 不是方程(1)、(4)的稳定的平衡点 0x 对于方程(4)的稳定性很容易由定义(3)证明,因为(4)的一般解是 0'()0()f x t x t ce x =+ (5) 其中C 是由初始条件决定的常数。
二、 微分方程组的平衡点和稳定性 方程的一般形式可用两个一阶方程表示为 112212()(,)()(,)dx t f x x dt dx t g x x dt ?=????=?? (6) 右端不显含t ,代数方程组 1212 (,)0(,)0f x x g x x =??=? (7) 的实根0012 (,)x x 称为方程(6)的平衡点。记为00012(,)P x x 如果从所有可能的初始条件出发,方程(6)的解12(),()x t x t 都满足 101lim ()t x t x →∞= 202lim ()t x t x →∞ = (8) 则称平衡点00012(,)P x x 是稳定的(渐近稳定);否则,称P 0是不稳定的(不渐 近稳定)。 为了用直接法讨论方法方程(6)的平衡点的稳定性,先看线性常系数方程 1111222122()()dx t a x b x dt dx t a x b x dt ?=+????=+?? (9) 系数矩阵记作 1122a b A a b ??=???? 并假定A 的行列式det 0A ≠ 于是原点0(0,0)P 是方程(9)的唯一平衡点,它的稳定性由的特征方程 det()0A I λ-= 的根λ(特征根)决定,上方程可以写成更加明确的形式: 2120()det p q p a b q A λλ?++=?=-+??=? (10) 将特征根记作12,λλ,则
物体的平衡问题 物体的平衡又分为随遇平衡、稳定平衡和不稳定平衡三种. 一、稳定平衡:如果在物体离开平衡位置时发生的合力或合力矩使物体返回平衡位置,这样的平衡叫做稳定平衡.如图1—1(a)中位于光滑碗底的小球的平衡状态就是稳定的. 二、不稳定平衡:如果在物体离开平衡位置时发生的合力或合力矩能使这种偏离继续增大,这样的平衡叫做不稳定平衡,如图1—1(b)中位于光滑的球形顶端的小球,其平衡状态就是不稳定平衡. 三、随遇平衡:如果在物体离开平衡位置时,它所受的力或力矩不发生变化,它在新的位置上仍处于平衡,这样的平衡叫做随遇平衡,如图1—1(c)中位于光滑水平板上的小球的平衡状态就是随遇的. 从能量方面来分析,物体系统偏离平衡位置,势能增加者,为稳定平衡; 减少者为不稳定平衡;不变者,为随遇平衡. 如果物体所受的力是重力,则稳定平衡状态对应重力势能的极小值,亦即物体的重心有最低的位置.不稳定平衡状态对应重力势能的极大值,亦即物体的重心有最高的位置.随遇平衡状态对应于重力势能为常值,亦即物体的重心高度不变. 二、方法演练 类型一、物体平衡种类的问题一般有两种方法解题,一是根据平衡的条件从
物体受力或力矩的特征来解题,二是根据物体发生偏离平衡位置后的能量变化来解题。 例1.有一玩具跷板,如图1—2所示,试讨论它的稳定性(不考虑杆的质量). 分析和解:假定物体偏离平衡位置少许,看其势能变化是处理此类问题的主要手段之一,本题要讨论其稳定性,可假设系统发生偏离平衡位置一个θ角,则: 在平衡位置,系统的重力势能为 (0) 2(c o s )E L l m g α=- 当系统偏离平衡位置θ角时,如图1一3所示,此时系统的重力势能为 ()[c o s c o s ()][c o s c o s E m g L l m g L l θθαθθαθ=-++-- 2c o s (c o s m g L l θ θ=- ()(0) 2(c o s 1)(c P E E E m g L l θθ?=-=-- 故只有当cos L l θ<时,才是稳定平衡. 例2.如图1—4所示,均匀杆长为a ,一端靠在光滑竖直墙上,另一端靠在光滑的固定曲面上,且均处于Oxy 平面内.如果要使杆子在该平面内为随遇平衡,试求该曲面在Oxy 平面内的曲线方程. 分析和解:本题也是一道物体平衡种类的问题,解此题显然也是要从能量的
物体平衡的稳定性 一、选择题 1.物体受共点力F1、F2、F3作用而做匀速直线运动,这三个力的数值选取可能正确的是()A.15 N、5 N、6 N B.9 N、2 N、7 N C.3 N、4 N、5 N D.1 N、6 N、3 N 2.如图4-1所示,在倾角为α的斜面上放一质量为m的光滑小球,球 被竖直的木板挡住,则小球对斜面的压力为() A.mgcosα B.mgtgα C.mg/cosα D.mg 3.如图4-2所示,在粗糙水平面上放一个三角形木块a,若物体b在a的斜面上匀速下滑,则() A.a保持静止,而且有相对水平面向右运动的趋势 B.a保持静止,而且没有相对水平面运动的趋势 C.a保持静止,而且有相对水平面向左运动的趋势 D.因未给出所需数据,无法对a是否运动或有无运动趋势作出判断 4.如图4-3所示,小球A静止于水平面B上,下列说法正确的是() A.A对B的正压力大小等于A的重力,这两个力是平衡的 B.A对B的正压力大小等于A的重力,这两个力是作用力和反作用力 C.B对A的支持力大小等于A的重力,这两个力是作用力和反作用力 D.B对A的支持力大小等于A的重力,这两个力是平衡力 5.如图4-4所示,PQ是一根非均匀直棒,全长8m,用两根细绳吊 成水平状态,α=60°,β=30°,则棒的重心到P点的距离是() A.1 m B.2 m C.3 m D.6 m 6.质量为m的物体,放在质量为M的斜面体上,斜面体放在粗糙 的水平地面上,m和M均处于静止状态,如图4-5所示.当物体m 上施加一个水平力F,且F由零逐渐加大到F m的过程中,m和M 仍保持相对静止,在此过程中,下列判断哪些是正确的() A.斜面体对m的支持力逐渐增大 B.物体m受到的摩擦力逐渐增大
1、如图2.2 -1所示,三个完全相同的半径为r的光滑小圆柱紧密接触叠放在光滑的大圆筒中,处于平衡 状态,试求大圆筒的最大半径R. 2、如图2.6-2所示,浮子是半径为R的球冠,质量为ml,质心到球冠底的距离 为h.另有一根长为ι,质量为m2的均匀细杆从浮子中心垂直插到底,细杆上 插一不计质量的小旗,试讨论该体系平衡的稳定性 3、半径R 0.5cm的空心球以角速度ω=5rad/s, 绕其竖直直径旋转,如图例2- 3a所示,在球内侧高度为R/2处有一小木块同球一起旋转, (g=10m/s2) (1)实现这一情况所需的最小摩擦系数是多 少? (2)求ω= 8rad·s-1时实现这一情况的条件 (3)就以下两种情况研究运动的稳定性. ( i)木块位置有微小变动 ( ii)球的角速度有微小变动. (第9届国际物理奥林匹克竞赛题) 4、一长方形均为薄板AB,可绕通过其重心、垂直于长度方向的 固定水平轴O (垂直纸面)自由转动,如图7练4所示。在板上轴 O左侧距O点为L处以轻绳悬挂一质量为m的物体。在轴O的 右侧板上放一质量也是m的立方体,立方体边长以及其左侧面到 轴O的距离均为ι。已知起始时板处于水平位置,挂物与地面相 接触,轻绳绷紧,整个系统处于平衡状态。现在立方体右侧面中
心处施一沿水平方向向右的力F 去拉它,若用符号μ表示立方体与板面间的静摩擦系数,当F 从零开始逐渐增大至某一数值时,整个系统的平衡状态将开始被破坏。试讨论:可能出现几种平衡状态被破坏的情况?每种情况出现的条件是什么?要求在以μ为纵坐标、x(= L 2-3)为横坐标的图中,画出可能发生这 几种情况出现的区域。不要求讨论这些区域交界线上的平衡状态被破坏的情况。 5、截面为正方形的木棒水平地浮在水面上,为使木棒对于水平轴的扭转扰动呈稳定平衡,木棒的比重应为多大? 6、半径为R 的圆环绕其铅垂直径轴以不变的角速度ω匀速转动。两质量 为m 的珠子用长为L=R 的轻杆相连,套在圆环上可以无摩擦地滑动,如 图7-练15所示。试求轻杆在圆环上的平衡位置,用环心O 与杆心C 的 连线与铅垂轴的夹角θ表示,并分析平衡的稳定性。 7、有一个熟鸡蛋的长轴为ι,其尖端B 的曲率半径为b ,圆端A 的曲率半径为 α,现已知圆端可以稳定地立在水平地面上,如果要其尖端能稳定地立在半径为 r 的碗里,对r 有什么要求? (所有接 触面都不会产生滑动) 8.曲杆DCE 中的CD 、CE 是相互垂直的两段均质杆,每段长为2l ,重量均为P 。将此曲杆搁在宽度为G 的光滑平台上(图)aL ,求平衡时的φ角
常微分方程平衡点及稳定性研究
摘要 本文给出了微分方程稳定性的概念,并举了一些例子来说明不同稳定性定义之间的区别和联系。这些例子都是通过求出方程解析解的方法来讨论零解是否稳定。在实际问题中提出的微分方程往往是很复杂的,无法求出其解析解,这就需要我们从方程本身来判断零解的稳定性。所以我们讨论了通过Liapunov稳定性定理来判断自治系统零解的稳定性,并用类似的方法讨论了非自治系统零解的稳定性。在此基础上,讨论了一阶和二阶微分方程的平衡点及其稳定性,这对其研究数学建模的稳定性模型起到很大的作用,并且利用相关的差分方程的全局吸引性研究了具时滞的单种群模型 ()()()() () .1 1N t N t r t N t cN t ττ -- = -- 的平衡点1 x=的全局吸引性,所获结果改进了文献中相关的结论。关键词:自治系统平衡点稳定性全局吸引性
Abstract In this paper,we gived the conceptions of differential equation stability. Simultaneously a number of examples to illustrate the difference between the definition of different stability and contact. These examples are obtained by analytical solution equation method to discuss the stability of zero solution. Practical issues raised in the often very complicated differential equations, analytical solution can not be obtained, which requires us to determine from the equation itself, the stability of zero solution. So we discussed the stability theorem to determine through the stability of zero solution of autonomous systems, and use similar methods to discuss the non-zero solution of autonomous system stability. On this basis,we discuss a step and the second-step and the stability, which plays the major role to its stability of the model, and the global attractivity of the positive equilibrium 1 x= of the following delay single population model ()()()() () .1 1N t N t r t N t cN t ττ -- = -- is investigated by using the corresponding result related to a difference equation.The obtained results improve some known results in the literature. Key Words:autonomous system;equilibrium point;stability;delay;globally asymptotic stability;global attractivity
1.平衡状态与稳定状态有何区别?热力学中为什幺要引入平衡态的概念? 答:平衡状态是在不受外界影响的条件下,系统的状态参数不随时间而变化的状态。而稳定状态则是不论有无外界影响,系统的状态参数不随时间而变化的状态。可见平衡必稳定,而稳定未必平衡。热力学中引入平衡态的概念,是为了能对系统的宏观性质用状态参数来进行描述。 2‘表压力或真空度能否作为状态参数进行热力计算?若:』:质的压力不变,问测设其压力的压力表或真空计的读数是否可能变化? 答:不能,因为表压力或真空度只是一个相对压力。荇:1:质的压力不变,测5:其压力的压力表或真空计的读数可能变化,因为测所处的环境压力可能发生变化。 3^当真空表指示数值愈大时,表明被测对象的实际压力愈大还是愈小? 答:真空表指示数值愈大时,表明被测对象的实际压力愈小。 4^准平衡过程与可逆过程有何区别? 答:无耗散的准平衡过程才是可逆过程,所以可逆过程一定是准平衡过程,而准平衡过程不一定是可逆过程。推平衡过程只注重
的是系统内部而可逆过程是内外兼顾! 5^不可逆过程是无法回复到初态的过程,这种说法是否正确? 答:不正确。不可逆过程是指不论用任何曲折复杂的方法都不能在外界不遗留任何变化的情况下使系统回复到初态,并不是不能回复到初态。引起其他变化时是可以回到初态的! 6~没有盛满水的热水瓶,其瓶塞有时被白动顶开,有时被0动吸紧,这是什幺原因? 答:水温较商时,水对热水瓶中的空气进行加热,空气压力升高,大于环境压力,瓶塞被9 动顶开。而水温较低时,热水瓶中的空气受冷,压力降低,小于环境压力,瓶塞被自动吸紧。人气卍力改变,热水能兌散失,导致内部乐力改变,乐力平衡打破1.用II形管压力表测定工质的压力时,压力表液柱直径的大小对读数有无影响? 答:严格说来,是有影响的,因为0型管越飢,就有越多的被测工质进入0型管中,这部 分工质越多,它对读数的准确性影响越大。
[A 组 素养达标] 1.(多选)下列物体的设计中能增大稳度的是( ) A .不倒翁的下部填充实物,上部空壳 B .赛车有一副“身矮轮宽”的怪模样 C .凳子将四条腿改为三条腿 D .船的两头尖,中间宽 解析:不倒翁的结构能降低重心,从而增大稳度,A 正确;赛车的宽轮胎能增大接触面,从而增大稳度,B 正确. 答案:AB 2.如图所示,放在水平桌面上的木块受到F 1=8 N 、F 2=3 N 的两水平推力作用而 静止.若撤去F 1,则木块在水平方向上受到的合力为( ) A .0 B .3 N,方向为水平向左 C .2 N,方向为水平向右 D .8 N,方向为水平向左 解析:木块原来处于静止状态,则所受摩擦力为静摩擦力,取向右为正方向,由平衡条件得F 1-F 2-f =0,得静摩擦力f =5 N,方向为水平向左.撤去F 1后,F 2使木块产生向左的运动趋势,由于F 2<5 N,故木块仍静止,故此时木块在水平方向上受到的合力为0(此时静摩擦力f′=3 N,方向为水平向右,与F 2平衡),故选A. 答案:A 3.如图所示,A 、B 两球完全相同,质量为m,用两根等长的细线悬挂在O 点,两球之间夹着一根劲度系数为k 的轻弹簧,静止不动时,弹簧位于水平方向,两根细线之间的夹角为θ,则弹簧的长度被压缩了( ) A. mgtan θ k B. 2mgtan θ k C.mgtan θ2 k D.2mgtan θ2 k 则x =mgtan θ2 k , 解析:对A 球受力分析如图所示,由平衡条件得:F =mgtan θ 2,又F =kx, 故C 对,A 、B 、D 错. 答案:C 4.如图所示,在粗糙水平面上放置A 、B 、C 、D 四个小物块,各小 物块之间由四
西华师范大学物理与电子信息学院- 1 - - 《物体的平衡性》教案 【课题】对物体平衡性的探究 【教学时间】40分钟 【教学对象】高一(上) 【教材】教育科学出版社第四章第3节 【主讲人】 【教学内容分析】 1.教材的地位和作用:课程地位及目标 本节内容是新教材第四章第三节的内容,应其在课程要求中为选学内容,对学生的要求相对较低,教材地位一般,只是教师对学生实际情况进行相应补充,和对教学方法的适当尝试;学生通过自我探究就简单规则几何体的平衡有一定定性了解。 。 2.课程标准对本节的要求:通过实验探究,让学生知道什物体平衡的分类,物体达到平衡的条件及稳定的概念,培养其的物理思维。 3.教材内容安排:通过实验得出自由落体是初速度为零的匀加速运动,并分析自由落体运动及其加速度。 4.对教材的处理:培养学生观察能力和分析,使之会验证匀变速直线运动;通过分析、归纳出自由落体运动的速度、位移公式,培养分析、推理、综合的能力。 【学生情况分析】 1.学生的兴趣:具有强烈的好奇心。 2.学生的知识基础:学生已经学过共点力平衡等有关知识。 3.学生的认识特点:本节知识的内容,接触多但并未进行总结和相关学习,在探究时,对实验结果的外推的有一定难度。 【教学目标】
1.知识与技能 通过实验观察、定义并理解简单几何体的平衡态的分类和做自由落体运动的条件 2.过程与方法 通过引导学生对实验进行控制变量的设计,是学生掌握实验设计原理,及对于探究的结果合理外推,大胆假设,科学求证的能力 3.情感态度与价值观 通过教学,使学生明白生活中简单几何体的平衡原理,激发起对物理学科的学习热情,使他们从生活走向物理,从物理走向科学。 【教学重点】物体平衡状态的分类,影响物体稳定性的因素及稳度的理解 【教学难点】 学生对于生活中的稳定事例关注不多,对于实验的设计和结果的外推,有较大影响,探究质量把握难度大。 【教学策略设计】 1.教学组织形式 新课程提倡以自主、合作、探究的教学组织形式来进行课堂教学,本节采用教师引导,学生探究的教学组织形式,让学生在体验科学探究的过程中,获取物理知识。 2.教学方法 (1)实验探究法 物理是一门以实验为基础的科学。本节教学设计注重以问题为先导,把主要内容的教学过程变成一种解决问题和科学探究的过程。 在教师的启发、引导下,学生自己探究,动手做一些有趣的小实验,尝试自己观察并描述实验现象,分析现象产生的原因,从而获取知识。整个过程渗透物理学研究方法、科学思维方法和协作精神、探索精神等情感态度价值观教育。 (2)讲授法