一、设计目的与要求:
了解并掌握单回路控制系统的构成和控制原理。了解PID参数整定的基本方法,如Zieg ler-Nichols整定方法、临界比例度法或衰减曲线法。学会用matlab中的Simulink仿真系统进行PID参数整定。
二、设计正文:
在热工生产过程中,最简单、最基本且应用最广泛的就是单回路控制系统,其他各种复杂系统都是以单回路控制系统为基础发展起来的。
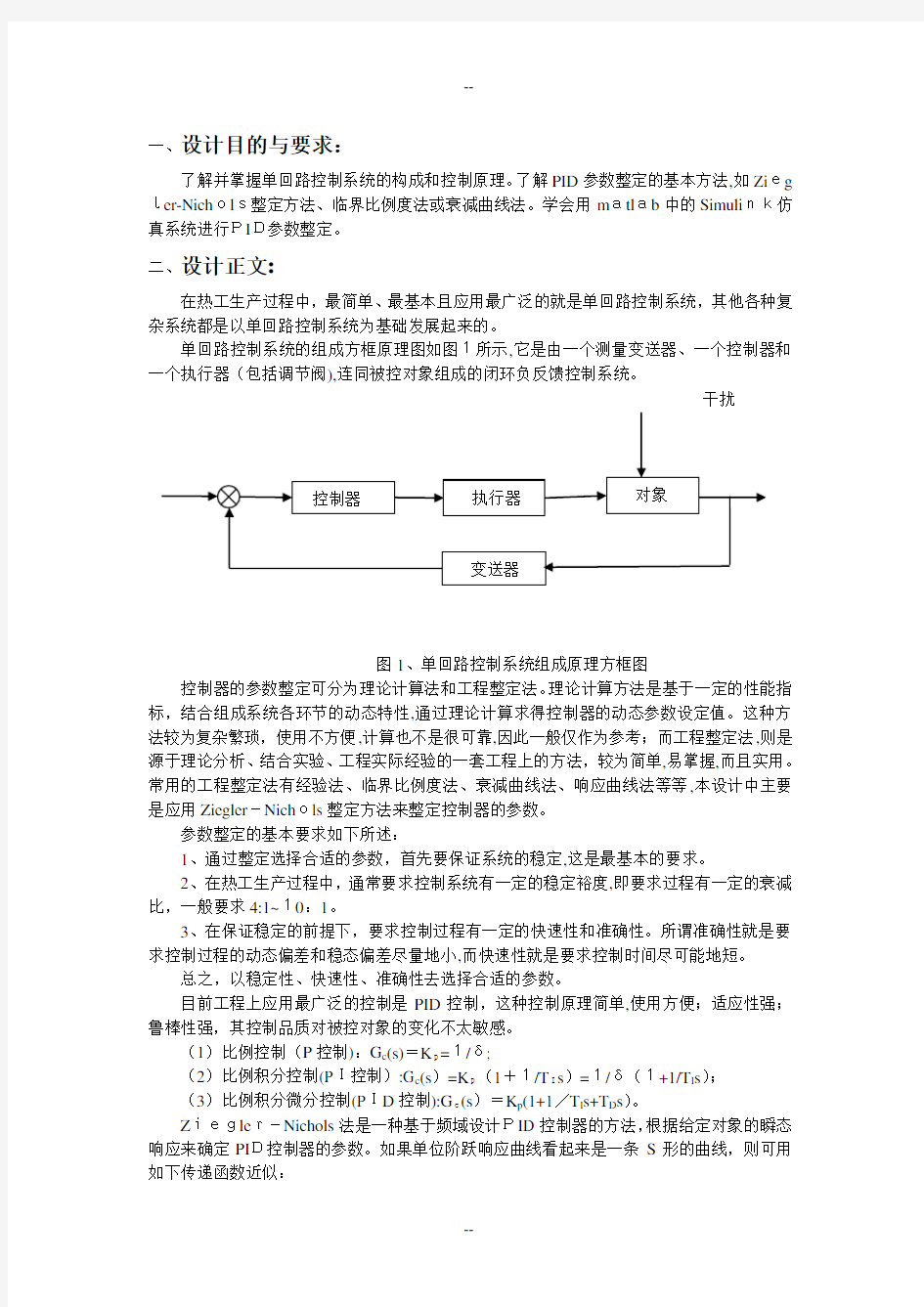
单回路控制系统的组成方框原理图如图1所示,它是由一个测量变送器、一个控制器和一个执行器(包括调节阀),连同被控对象组成的闭环负反馈控制系统。
图1、单回路控制系统组成原理方框图
控制器的参数整定可分为理论计算法和工程整定法。理论计算方法是基于一定的性能指标,结合组成系统各环节的动态特性,通过理论计算求得控制器的动态参数设定值。这种方法较为复杂繁琐,使用不方便,计算也不是很可靠,因此一般仅作为参考;而工程整定法,则是源于理论分析、结合实验、工程实际经验的一套工程上的方法,较为简单,易掌握,而且实用。常用的工程整定法有经验法、临界比例度法、衰减曲线法、响应曲线法等等,本设计中主要是应用Ziegler-Nichols整定方法来整定控制器的参数。
参数整定的基本要求如下所述:
1、通过整定选择合适的参数,首先要保证系统的稳定,这是最基本的要求。
2、在热工生产过程中,通常要求控制系统有一定的稳定裕度,即要求过程有一定的衰减比,一般要求4:1~10:1。
3、在保证稳定的前提下,要求控制过程有一定的快速性和准确性。所谓准确性就是要求控制过程的动态偏差和稳态偏差尽量地小,而快速性就是要求控制时间尽可能地短。
总之,以稳定性、快速性、准确性去选择合适的参数。
目前工程上应用最广泛的控制是PID控制,这种控制原理简单,使用方便;适应性强;鲁棒性强,其控制品质对被控对象的变化不太敏感。
(1)比例控制(P控制):G c(s)=Kp=1/δ;
(2)比例积分控制(PI控制):G c(s)=Kp(1+1/TIs)=1/δ(1+1/T I s);
(3)比例积分微分控制(PID控制):Gc(s)=K p(1+1/T I s+T D s)。
Ziegler-Nichols法是一种基于频域设计PID控制器的方法,根据给定对象的瞬态响应来确定PID控制器的参数。如果单位阶跃响应曲线看起来是一条S形的曲线,则可用如下传递函数近似:
)()(s R s C =1
+-Ts Ke Ls
利用延迟时间L、放大系数K 、和时间常数T,根据表1中的公式确定K p 、T I 、TD 的
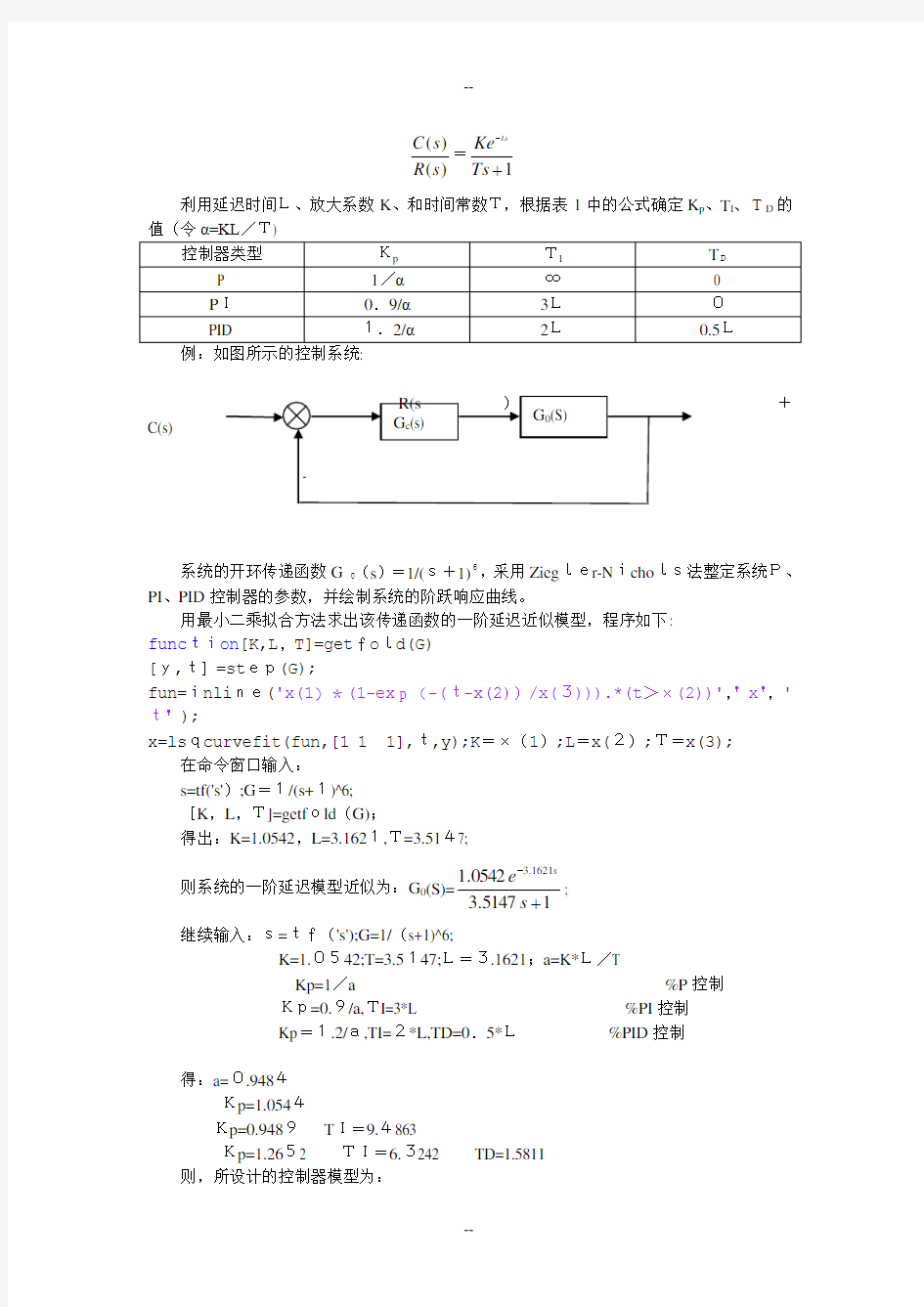
例:如图所示的控制系统:
+
C(s)
系统的开环传递函数G 0(s )=1/(s+1)6
,采用Zieg ler-N icho ls法整定系统P、PI 、PID 控制器的参数,并绘制系统的阶跃响应曲线。
用最小二乘拟合方法求出该传递函数的一阶延迟近似模型,程序如下: func tion [K,L ,T]=get fo ld(G) [y,t]=st ep(G);
fun=inli ne('x(1)*(1-ex p(-(t-x(2))/x(3))).*(t >x(2))','x ','t');
x=ls qcurvefit(fun,[1 1 1],t,y);K =x(1);L =x(2);T=x(3);
在命令窗口输入:
s=tf('s');G =1/(s+1)^6; [K ,L ,T]=getf old (G);
得出:K=1.0542,L=3.1621,T=3.5147;
则系统的一阶延迟模型近似为:G 0(S)=1
5147.30542.11621.3+-s e s
;
继续输入:s=tf('s');G=1/(s+1)^6;
K=1.0542;T=3.5147;L=3.1621;a=K*L/T
Kp=1/a %P 控制 Kp=0.9/a,TI=3*L %PI 控制 Kp =1.2/a,TI=2*L,TD=0.5*L %PID 控制
得:a=0.9484 Kp=1.0544
Kp=0.9489 T I=9.4863
Kp=1.2652 TI=6.3242 TD=1.5811 则,所设计的控制器模型为:
P控制:G C(S)=1.0544
PI控制:G C(S)=0.9489(1+1/9.4863s)
PID控制:G C(S)=1.2652(1+1/6.3242s+1.5811s)。
建立如图所示的Simulink仿真模型:
将Kp值置1,把反馈连线,微分器的输出连线,积分器的输出连线都断开,选定仿真时间,可得出系统开环的单位阶跃响应曲线:
P控制时,将Kp设为1.0544,将反馈连线连上,仿真运行,得到响应曲线:
PI控制时,将Kp设为0.9489,TI设为9.4863,将积分器的输出连线连上,仿真运行得出响应曲线:
PID控制时,将Kp设为1.2652,TI设为6.3242,TD设为1.5811,将微分器的输出连线连上,运行仿真得出响应曲线:
将三种控制下的响应曲线可以看出,P控制和PI控制两者的响应速度基本相同,因为这两种控制的比例系数不同,因此系统稳定的输出值不同,PI控制的超调量比P控制的要小,PID控制比P控制和PI控制的响应速度快,但是超调量大些。
通过变化各项参数的大小可以总结出以下几条基本的PID参数整定规律:
1、增大比例系数一般将加快系统的响应,在有静差的情况下有利于减小静差,但是过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变差。
2、增大积分时间有利于减小超调,减小振荡,使系统的稳定性增加,但是系统静差消除时间变长。
3、增大微分时间有利于加快系统的响应速度,使系统的超调量减小,稳定性增加,但系统对扰动的抑制能力减弱。
三、设计心得体会:
通过这次的设计实验,我进一步巩固了书本中所学的单回路控制相关的内容,掌握了有关PID控制的相关知识和内容。同时学会了用Ziegler-Nichols方法整定PID控制器的各种参数,用Matlab中的Simulink仿真系统求出系统的阶跃响应曲线,收获很大。
四、参考文献:
1、《控制系统计算机辅助设计—MATLAB语言与应用》(第二版);
薛定宇; 清华大学出版社
2、《火电厂热工自动控制技术及应用》;刘禾白焰李新利;中国电力出版社
3、《过程控制与Simulink应用》;王正林郭阳宽;电子工业出版社