基于ARM的多自由度机械手设计
孙捷,刘瑄,刘楚,徐莲辉摘要:机械手选用ARM芯片作为控制核心,主要是基于其运算能力强,外设接口丰富,可扩展成串行、并行、高速和低速等各种接口,也能很容易扩展成网络接口,便于机械手组网协同工作。特别是ARM芯片的LCD接口和存储器扩展接口能大大提高机械手的智能化程度,扩展LCD后能提供友好的人机交互界面,便于编程、维护和故障指示;大容量存储器可为复杂运算和大数据存储提供方便。ARM的这些优点为机械手的高度智能化提供了最有效的保证。
关键词:机械手;ARM芯片;伺服电机;嵌入式;控制系统
引言
机器人应用情况是展现一个国家工业自动化水平的重要标志。工业自动化中机械手发挥了相当大的作用,生产中应用机械手可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、易爆、有放射性或有毒性污染的场合中,机械手能代替人进行正常的工作。特别是近些年人工成本越来越高,企业都迫切需要采用一些自动化设备来降低人工成本,工业机械手在这方面有着广阔的应用前景。
常用的机械手多为6个自由度以下的。一般的专用机械手只有2~4个自由度,而通用机械手则多数为3~6个自由度。目前大多数工业机械手基本上都是采用单片机、PLC或DSP等控制的,单片机只能控制简单的3个自由度以下的机械手;PLC控制的成本高,运算能力很差,对机械手运动轨迹控制能力差;应用DSP控制运算能力强,但其外设接口没有ARM丰富,并且成本也比ARM高,一片DSP控制的机械手自由度也有限,6个自由度的、复杂一点的机械手都需要多个DSP芯片协同才能较好地完成控制。
1机械部分设计与安装
1.14个自由度设计
机械抓手选用型号为42HD2401-100L,两相4线步进电机,丝杆电机的行程为100mm,步距角为1.8°,电流1.5AN1504。利用其不同的行程可以设计不同力矩大小的抓手或夹具,此部分通过加工的一个连接轴,用螺丝锁定在型号为42BYG行星减速步进电机上,配48mm步进电机,减速比5.18∶1,这样控制机械抓手在360°范围内旋转。也就是机械手的第一自由度控制。
第二自由度装置负责将前面第一自由度的电机固定,并且控制运动一定的角度范围,根据选用的蜗轮减速装置结构,角度范围为0~130°。电机为57步进电机57BYG250H,转矩2.8NM,步距角1.8°,机身长112mm,蜗轮蜗杆减速机NMRV030,减速比1∶20。
第三自由度使用的电机型号为86HS45-80,两相步进,步距角1.8°,机身长度78mm,电流4A,保持转矩4.24NM。配备蜗轮减速装置RV040,减速比1∶20。
第四自由度主要负责平面内360°旋转,采用与第二自由度一样的电机,减速装置的减速比为1∶30。该电机安装在底座上。
1.2电机驱动器选型及机械部分总成
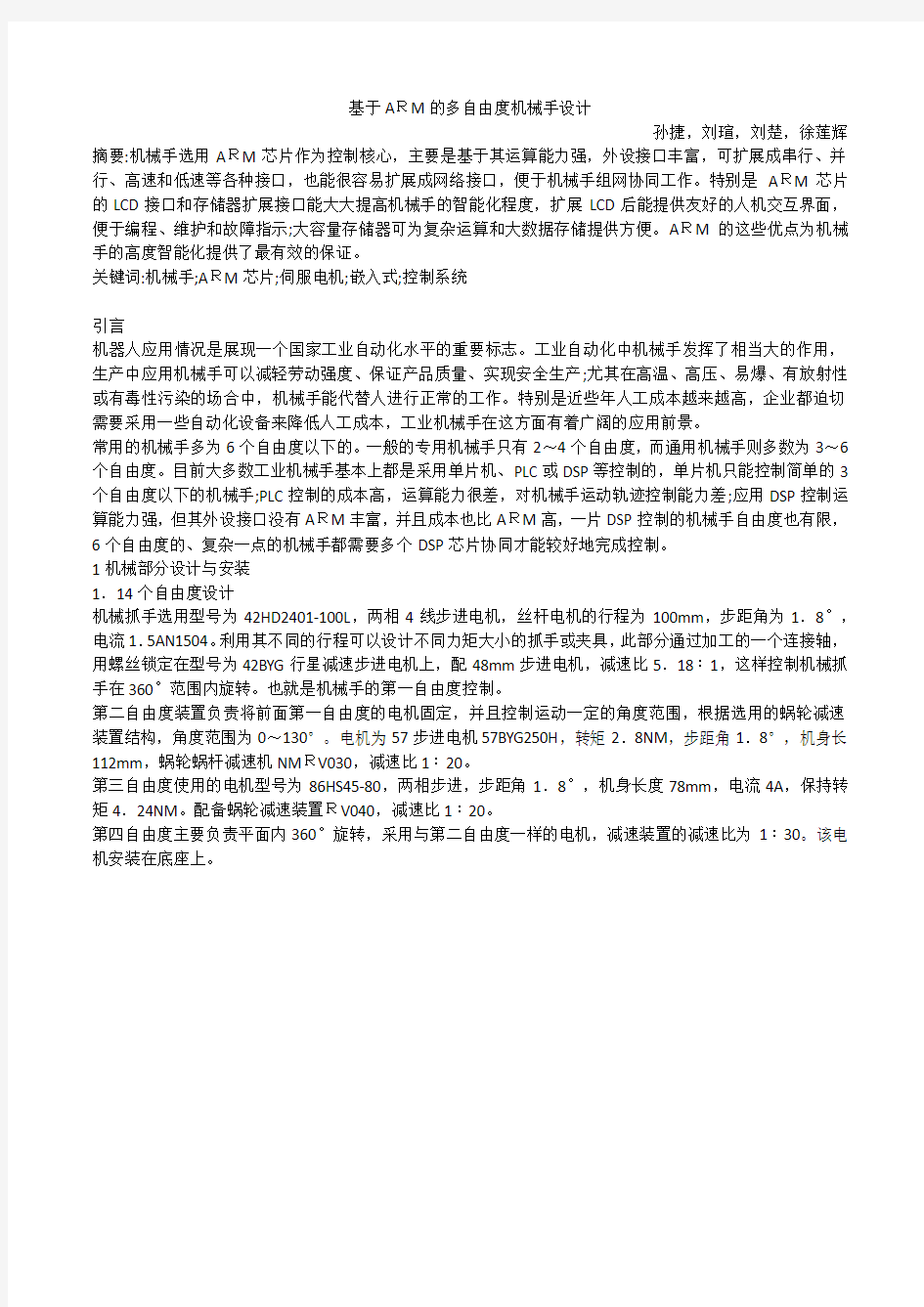
机械手有4个自由度和1个机械抓手,共使用了5个不同规格步进电机,其中86型号的电机使用的是F-MD860,其他的都使用DM542型,配备了两个24V功率为图1四自由度机械手实物图250W的电源分别供电。
所有机械部分安装完成后的实物图如图1所示,底座采用镀锌方管焊接成100mm×100mm的双层铁架构成,最下面的电机用角铁固定,全部用自喷漆喷涂一遍用于防锈,将导线用伸缩塑胶管封固定,以防导线缠绕或损坏。
2机械手控制系统硬件设计
机械手的控制核心采用功能强大的ARM芯片来进行设计,芯片型号为STM32F103C8T6,引脚数48。控制
板接收上位机的串口通信数据,并根据数据协议转变为控制步进电机的脉冲信号去驱动各个步进电机,控制板采用双排针将所有GPIO全部引出,可以灵活扩展。原理图使用的是AltiumDesigned10软件进行绘制,ARM控制板CPU部分电路原理图如图2所示,时钟、复位、电源电路原理图如图3所示,串口与JTAG电路原理图如图4所示。
机械手的具体指标参数如下:机构材料采用全金属
材料;驱动方式为步进伺服混合驱动;操作方式采用可
编程单机工作/联机工作;重复定位精度为±5mm;最大
展开半径为600mm;高度为1000mm;本体重量≤50
kg;电源为单相220V;最大功率<200W;动作范围为第
1自由度转动-180°~180°,速度范围在0.5°/s~50°/
s;第2自由度转动-65°~65°,速度范围在0.5°/s~
30°/s;第3自由度转动-65°~65°,速度范围在0.5°/s
~30°/s;第4自由度转动-180°~180°,速度范围在
0.5°/s~40°/s。
3机械手控制系统软件设计
3.1ARM控制板软件的设计
开发环境使用的是KeiluVision3+MDK3.50,ARM控制板上的程序主要包括串口通信的控制和脉冲波形的产生,主控程序流程图如图5所示。STM32F103首先要进行初始化,主要有如下初始化内容:RCC_Configuration(void)、NVIC_Configuration(void)、GPIO_Configuration(void)、USART_Init(USART1,&USA RT_InitStructure)和TIM3_PWM_Init(u16arr,u16psc)。串行通信先要设置GPIO引脚,串口设置波特率为9600b/s,8bit数据,2bit停止位,不使用奇偶校验位,无硬件流控制。最后还要按如下语句进行串口接收中断初始化设置:
NVIC_InitStructure.NVIC_IRQChannel=USART1_IRQChannel;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriori-ty=0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure)。
为了保证ARM控制板能在接收命令参数后独立控制机械手的运动,需要将数据存储在ARM芯片的Flash
存储器中,然后再读出、解析、执行命令,程序流程图如图6所示。
另外对于脉冲波形的产生,采用ARM芯片内自带的硬件定时器单元来产生频率可调的方波,定时器中断初始化的程序如下:
voidTimerx_Init(u16arr,u16psc)
{
RCC->APB1ENR|=1<<1;
//TIM3时钟使能
TIM3->ARR=arr;
//设定计数器自动重装值,刚好1ms
TIM3->PSC=psc;//预分频器7200,得到10kHz的计数时钟
TIM3->DIER|=1<<0;//允许更新中断
TIM3->DIER|=1<<6;//允许触发中断
TIM3->CR1|=0x01;//使能定时器3
MY_NVIC_Init(1,3,TIM3_IRQChannel,2);
//抢占1,子优先级3,组2
}
周期时间较长的方波用上述定时器中断溢出进行计时产生,这种方法产生的延时可以很长,适用于对各种动作速度的控制。对于运动较快的也可以直接利用STM32F103中的硬件PWM单元来产生方波,这种周期时间较短,其主要控制源程序如下:
voidTIM3_PWM_Init(u16arr,u16psc)
{//此部分需手动修改IO口设置
RCC->APB1ENR|=1 1;//TIM3时钟使能
RCC->APB2ENR|=1 3;//使能PORTB时钟
GPIOB->CRL&=0XFF0FFFFF;//PB5输出
GPIOB->CRL|=0X00B00000;//复用功能输出
RCC->APB2ENR|=1 0;//开启辅助时钟
AFIO->MAPR&=0XFFFFF3FF;
//清除MAPR的[11:10]
AFIO->MAPR|=1 11;
//部分重映像,TIM3_CH2->PB5
TIM3->ARR=arr;//设定计数器自动重装值
TIM3->PSC=psc;//预分频器不分频
TIM3->CCMR1|=7 12;//CH2PWM2模式
TIM3->CCMR1|=1 11;//CH2预装载使能
TIM3->CCER|=1 4;//OC2输出使能
TIM3->CR1=0x0080;//ARPE使能
TIM3->CR1|=0x01;//使能定时器3
}
3.2机械手上位机软件的设计
上位机程序主要完成机械手运动位置参数的设定,并且通过串口将数据传送给ARM开发板,在调试过程中,将运动控制分为单轴运动的控制和三轴运动的控制。单轴控制界面如图7,三轴运动控制界面如图8,分别输入x、y、z三个方向的起始和终止坐标,启动后即可将数据传送给下位机。
在界面上还有串口通信数据监测窗口,主要显示发出的命令和收到的数据是否正常,这样能方便进行开发。在进入串行数据通信编程中,应用CSerialPort类进行编程,对串口、波特率、数据位数、停止位、奇偶校验位等初始化,使用的主要函数为InitPort(),如下所示:
if(m_Port.InitPort(this,m_nCom,m_nBaud,m_cParity,m_nDa-tabits,m_nStopbits,m_dwCommEvents,512)){
m_Port.StartMonitoring();
m_CtrlOpenPort.SetWindowText("打开串口");
m_Port.ClosePort();//关闭串口
}elseAfxMessageBox("没有发现此串口");
发送数据使用的主要语句如下:
sendcommand=m_strSendData;
m_Port.WriteToPort((LPCTSTR)sendcommand);//发送数据
接收数据在CSerialPort类中进行,可以中断接收,但必须在主程序中进行数据识别,本文在LONGCICtest-Dlg::OnCommunication(WPARAMch,LPARAMport)函数中专门来解析接收到的数据。
4结束语
本项目主要是利用ARM系列的CPU作为控制核心,驱动一定数量的伺服机构来组装一台多个自由度的机械手装置。与传统的机械手控制系统相比,本系统具有体积小、功耗低、性能髙、成本低等优点,具有很好的发展前景。重复定位精度未达到预先估计的值,这与购买的电机和减速机的制造精度有关,并且步进电机在运行过程中还可能失步,因此还有许多方面需要改进,比如在各个电机运动控制时加装编码器来进行运动角度检测,这样可以改进精度方面的问题,也完全可以消除失步的问题。
实验报告 (理工类) 课程名称: 机器人创新实验 课程代码: 6003199 学院(直属系): 机械学院机械设计制造系 年级/专业/班: 2010级机制3班 学生姓名: 学号: 实验总成绩: 任课教师: 李炜 开课学院: 机械工程与自动化学院 实验中心名称: 机械工程基础实验中心
一、设计题目 工业机器人设计及仿真分析 二、成员分工:(5分) 三、设计方案:(整个系统工作原理和设计)(20分) 1、功能分析 工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。 本次我们小组所设计的工业机器人主要用来完成以下任务: (1)、完成工业生产上主要焊接任务; (2)、能够在上产中完成油漆、染料等喷涂工作; (3)、完成加工工件的夹持、送料与转位任务; (5)、对复杂的曲线曲面类零件加工;(机械手式数控加工机床,如英国DELCAM公司所提供的风力发电机叶片加工方案,起辅助软体为powermill,本身为DELCAM公司出品)
本科毕业设计(论文) 题目:多自由度机械手设计 系别:机电信息系 专业:机械设计制造及其自动化 班级: 学生: 学号: 指导教师: 2013年4月
本科毕业设计(论文) 题目:多自由度机械手设计 系别:机电信息系 专业:机械设计制造及其自动化 班级: 学生: 学号: 指导教师: 2013年4月
多自由度机械手设计 摘要 随着现代科学技术的发展,机器人技术越来越受到广泛关注,在工业生产日益现代化的今天,机器人的使用变得越来越普及。因此,对于机器人技术的研究也变得越来越迫切,尤其是工业机器人方面。本论文作者针对这一领域,设计了一款液压机械机械手,该机器人拥有五个自由度。首先,作者针对该机器人的设计要求,对结构设计选择了一个最优方案,对关键零件设计并进行校核。 本课题是一个机械、液压紧密的实用性项目,文中对机械手机械结构的设计、液压系统的设计。最后,总结了全文,指出了机械手的改进措施、应用前景和发展方向。 关键词:机械手;液压系统;五个自由度
Many degrees of freedom manipulator design Abstract With the development of modern science and technology, the robot technology has been paid more and more attention, in an increasingly modernized industrial production, the use of robots is becoming more and more popular. Therefore, the research of robot technology becomes more and more urgent, especially industrial robots. The author of this thesis in this field, design of a hydraulic mechanical manipulator, the robot has five degrees of freedom. First of all, the author according to the requirement of the design of this robot, an optimal scheme of the structure design of the selection, the design of key parts and checked. This topic is a mechanical, hydraulic close practical project, design of mechanical design, mechanical structure of the hydraulic system of the mobile phone in. Finally, summarized the full text, points out the improvement measures, manipulator application prospect and development direction. Keywords: manipulator; hydraulic system; five degrees of freedom
设计说明书 课题:凸轮轴加工自动线机械手 班级:数控69902 设计:沈晓春 审核: 二00五年九月
目录 一、目录 (2) 二、前言 (3) (一)机械手的用途说明 (3) (二)设计机械手的目的、意义 (3) (三)设计指导思想应达到的技术性能要求 (4) 三、设计方案论证 (5) (一)机械手的原始依据 (5) (二)机械手的运动方案论证 (6) 四、机械手各组成部件设计计算 (8) (一)抓取机械设计 (8) (二)手腕机构 (12) (三)手臂设计 (14) (四)缓冲装置设计 (22) (五)定位机构设计…………………………………………………………………………………
25 (六)机械手驱动系统设计 (25) 五、机械手控制系统设计 (25) 六、设计总结 (26) 七、参考文献 (27) 二、前言 (一)机械手的用途说明 机械手是模仿人手工作的机械设备。实验用机械手的设计,是指机械手臂在一定范围内的摆动,手臂的垂直方向的上下移动及手爪的伸缩运动组成。由启动系统实现各运动的驱动。它的主要作用是将工件按预定的程序自动地搬运到需要的位置,或者保持工具进行工作。机械手是利用PLC控制整个系统实现各种运动的自动化控制,且能用于教学演示。 (二)机械手的目的、意义 机械手是模仿人手的动作,生产中应用机械手可以提高自动化水平和劳动生产率,可以减轻劳动强度,保证产品质量,实现安全生产,尤其在恶劣的劳动条件下,它代替人作业的意义更加重大。因此,在机械加工中得到越来越广泛的应用。
目的是,我们对机械手的设计步骤有一定的平衡了解;也能基本掌握机械设计的方法;综合运用学过的理论知识;全面复习绘图技巧,并较好的运用于毕业设计绘图上。通过这次设计,使我了解到,自动控制的对象主要是单机或某个生产过程,智能控制则包括控制对象及整个工作环境或整个生产过程;自动控制的目标是使在系统控制的某个状态下,尽量消除环境对系统的影响,智能控制关心的使最终状态或现行状态是否合乎要求。因此,要充分考虑环境的影响;自动控制的学习来源重要是对象的状态的反馈,所以智能控制需要一个庞大的数据库;自动控制理论着重描述对象的数学模型,然后,通过各种控制算法进行控制,以达到目的,智能控制着重直接控制经验。(三)设计的指导思想,应达到的技术性能要求 结构简单:设计为三自由度的机械手臂,运动形式简单,可以把手臂设计成为沿导向装置运动,直接选用标准规格的液压缸和内胀式机械手爪,无须另行设计。 外观不要有手臂堵塞外形:设计尽量要求安装方便,各非标准件加工方便。因此,不必设计成套形式,管道也不必安排在手臂内部,可以采用软管直接连接。 本次设计的手臂不要光用于工业生产,因此,对各部件的加工精度及安装要求不高,可以在通用机床上加工完成。
六自由度工业机器人 对于工业机器人的设计与大多数机械设计过程相同;首先要知道为什么要设计机器人机器人能实现哪些功能活动空间(有效工作范围)有多大了解基本的要求后,接下来的工作就好作了。 首先是根据基本要求确定机器人的种类,是行走的提升(举升)机械臂、还是三轴的坐标机器人、还是六轴的机器人等。选定了机器人的种类也就确定了控制方式,也就有了在有限的空间内进行设计的指导方向。 接下来的要做的就是设计任务的确定。这是一个相对复杂的过程,在实现这一复杂过程的第一步是将设计要求明确的规定下来;第二步是按照设计要求制作机械传动简图,分析简图,制定动作流程表(图),初步确定传动功率、控制流程和方式;第三步是明确设计内容,设计步骤、攻克点、设计计算书、草图绘制,材料、加工工艺、控制程序、电路图绘制;第四步是综合审核各方面的内容,确认生产。 下面我将以六轴工业机器人作为设计对象来阐明这一设计过程: 在介绍机器人设计之前我先说一下机器人的应用领域。机器人的应用领域可以说是非常广泛的,在自动化生产线上的就有很多例子,如垛码机器人、包装机器人、转线机器人;在焊接方面也有很例子,如汽车生产线上的焊接机器人等等;现在机器人的发展是非常的迅速,机器人的应用也在民用企业的各个行业得以延伸。机器人的设计人才需求也越来越大。 六轴机器人的应用范筹不同,设计形式也各不相同。现在世界上生产机器人的公司也很多,结构各有特色。在中国应用最多的如:ABB、Panasonic、FANUK、莫托曼等国外进口的机器人。 既然机器人的应用那么广泛,在我国却没有知名的生产公司。对于作为中国机械工程技术人员来说是一个值得思考的问题!有关机器人技术方面探讨太少了从业人员还不能成群体虽然在很多地方可以看到机器的论术,可是却没有真正形成普及的东西。 即然是要说设计,那我就从头一点一点的说起。力求讲的通俗简明一些,讲得不对的地方还请各位指正! 六轴机器人是多关节、多自由度的机器人,动作多,变化灵活;是一种柔性技术较高的工业机器人,应用面也最广泛。那么怎样去从头开始的设计它呢工作范围又怎样去确定动作怎样去编排呢位姿怎样去控制呢各部位的关节又是有怎么样的要求呢等等。。。。。。让我们带着众多的疑问慢慢的往下走吧! 首先我们设定:机器人是六轴多自由度的机器人,手爪夹持二氧气体保护焊标准焊枪;完成点焊、连续焊等不同要求的焊接部件,工艺要求、工艺路线变化快的自动生线上。最大伸长量:1700mm;转动270度;底座与地平线水平固定;全电机驱动。 好了,有了这样的基本要求我们就可以做初步的方案的思考了。 首先是全电机驱动的,那么我们在考虑方案的时候就不要去考虑液压和气压的各种结构了,也就是传动机构只能用齿轮齿条、连杆机构等机械机构了。 机器人是用于焊接方面的,那么我们就去考察有人工行为下的各种焊接手法和方法。这里就有一个很复杂的东西在里面,那就是焊接工艺;即然焊艺定不下来,我们就给它区分一下,在常用焊接里有单点点焊、连续断点点焊、连续平缝焊接、填角焊接、立缝焊接、仰焊、环缝焊等等。。。。。。 搞清了各种焊方法,也就明白了要实现这些复杂的动作就要有一套可行的控制方式才行;在机械没有完全设计出来之前可以不做太多的控制方案思考,有一个大概的轮廓概念就行了,待机械结构做完,各方面的驱动功率确定下来之后再做详细的程序。 焊枪是用常用的标准的焊枪,也就是说焊枪是随时可以更换下来的,也就要求我们要做到对焊枪的夹持部分进行快速锁定与松开。
中北大学 信息商务学院 《机床电气控制与PLC》实验报告 学院: 业:专班级:学号: 姓名:
月6年2014 实验机械手的PLC控制 .实验目的一1.进一步熟悉机床电气控制环节中常用的低压电器,熟练掌握按钮、接触器等低压电器的工作原理及其安装、接线等使用方法。; 2.掌握PLC控制系统设计方法与步骤,掌握PLC的基本硬件配置及硬件连接方法。 3.掌握机械手的基本控制手段,如左转、右转、前伸、后缩、放松、加紧、上升、下降等。二.实验内容及要求 本实验的目的是通过PLC实现机械手的操作控制,如左转、右转、前伸、后缩、放松、加紧、上升、下降等。学生完成PLC控制电路、完成硬件连接、编写控制程序并现场调试。 要求: 1.选择PLC并设计PLC控制电路。要求PLC选型合理、控制方式简单可靠; 2.选取所需的硬件元件完成硬件连接; 3.编写控制程序。要求程序简单可靠、结构合理; 4.系统必须能够调试通过,运转达到设计要求 二.实验仪器及设备 计算机一台、机械手工作台1套、控制按钮若干、PLC基本模块1个、各种导线若干、PLC编程软件。 三.实验步骤 1.根据实验要求,确定要实现的功能并设计状态转移图: 2.根据给定的PLC和所设计的控制功能进行元器件选择和PLC的I/O分配,并填写在表1-1中。表1-1 电机控制I/O分配表 输入输出器件功输出端输入端器件功器件名器件名
3. 根据I/O分配表画出I/O接线图,并连接控制线路。 所设计的控制电路接线图: 4. 根据控制要求编写PLC程序(以梯形图的方式或者指令表方式)。所设计的梯形图或状态转移图: 指令表:
前言 1.1 课题背景及意义 机械手通过运动控制芯片、单片机、可控制编程器等来控制电机、气缸、液压缸的运动,从而模仿人手和臂的某些动作,按固定程序实现物体的抓取。它可代替人的劳动,也可以在有害环境下保护人身安全,因而广泛应用于机械制造、电子、原子能等部门。目前机械手主要用于以下几个方面。 (1).恶劣的工作环境和危险的工作 在核工业中,核产品具有较强的放射性,为了人员的安全,需要机械手来完成相关的清理工作。 (2).自动化生产领域 主要用于生产上实现自动化。如当机械手末端夹持焊枪时,可以对汽车或摩托车的车体进行点焊或弧焊作业。 (3).在特殊作业场合进行极限作业 在一些高危领域经常要用到机器人去探索。目前研制出了螃蟹机器人,用于水下勘测、海洋搜寻及石油天然气的勘测。 (4).农业生产 目前研制出了太阳能农用机器人,他可以找到隐藏在农作物中的杂草,通过机械手隔断杂草,同时还可以利用机械手喷洒除草剂。 (5).军事应用 在军事应用中,军人执勤经常会遇到危险,这就需要机器人帮助完成执勤任务,当今世界机器人竞争很激烈,要在这个激烈的国际竞争中立于不败之地,就需要有我国自己的机器人产业,未来世界高科技的竞争更重要的则是人才的竞争。因此,从现在开始就应该注意培养后备力量。机械手是机器人产业的典型代表,因此可以用来作为教学应用的示例。 机械手为典型的机电产品,包含了驱动元件,控制元件,信息处理元件,执行机构,传动机构,机械本体等组成元素,并且具有控制能力强,改变控制程序灵活方便、可靠性高等特点,为学生提供了良好的学习工具。它将现代工业与教学联系在了一起,通过控制—执行这整个的过程使学生对所学的知识有一个更好的认识,从而激发学生的学习兴趣。随着当今计算机技术的飞速发展,它已突破纯开关量控制的局限,进入模拟量控制等领域。通过该机械手的教学开拓了学生专业视野,为他们迎接就业和深造的挑战打下坚实的基础。
一、机器人擂台赛 1、实训目的 机器人擂台赛的目的在于促进智能机器人技术(尤其是自主识别、自主决策技术)的普及。参赛队需要在规则范围内以各自组装或者自制的自主机器人互相搏击,并争取在比赛中获胜,以对抗性竞技的形式来推动相关机器人技术在大学生、青少年中的普及与发展。可以用自己设计的机器人来参加擂台赛,同时掌握这个环节所展现出来的机器人技术。 机器人擂台赛未来的发展目标是:比赛中,两个使用双腿自主行走的仿人形机器人互相搏击并将对方打倒或者打下擂台。? 2、实训要求 在指定的大小擂台上有双方机器人。?双方机器人模拟中国古代擂台搏击的规则,互相击打或者推挤。如果一方机器人整体离开擂台区域或者不能再继续行动,则另一方获胜。机器人大小要求长、宽、高分别不能超过30cm、30cm、40cm 。 比赛场地大小为长、宽分别为是 2400?mm的台,台上表面即为擂台场地。有黑色的胶布围成。?比赛开始后,?围栏内区域不得有任何障碍物或人。? 3、比赛规则分析? 我们需要吃透比赛规则,然后才能在比赛规则允许的范围内,尽量让我们的机器人具有 别人不具有的优势。对上述的比赛规则分析得到以下几个重点:? 3、1需要确保自己不掉下擂台
需要有传感器进行擂台边沿的检测,当发现机器人已经靠近边沿立刻转弯或者掉头。擂 台和地面存在比较大的高度差,我们通过测距传感器很容易发现这个高度落差,从而判断出 擂台的边沿。如图所示,在机器人上安装一个测距传感器,斜向下测量地面和机器人的 距离,机器人到达擂台边沿时,传感器的测量值会突然间变得很大。由于红外测距传感器使 用方便,并且“创意之星”控制器可以接入最多 8 个红外测距传感器,我们可以将它作为首选方案。? 擂台地面时有灰度变化的,我们可以在机器人腹部安装一些灰度传感器,来判读机器人 覆盖区域的灰度变化,从而判读机器人相对场地的方向。可以通过整体灰度值来判读机器人 的位置是不是靠近边沿,如果机器人靠近边沿就转弯后者后退。? 3、2需要及时的发现敌方 这里我们使用红外接近开关作为寻找敌方的方案并不算优秀,红外接近开关的有效测量范围是 20cm,20cm 之外的物体是察觉不到的。我们可以改成红外测距传感器,它的有效测量范围是 10‐80cm,比较适合我们当前的使用场合。? 3、3需要迅速的推动敌方,将敌方退下擂台 我们可以想象,两只斗牛相互推挤,赢的一定是力气比较大的一方。?
第一章引言 机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品的产业。不论是传统产业,还是新兴产业,都离不开各种各样的机械装备,机械工业所提供装备的性能、质量和成本,对国民经济各部门技术进步和经济效益有很大的和直接的影响。机械工业的规模和技术水平是衡量国家经济实力和科学技术水平的重要标志。因此,世界各国都把发展机械工业作为发展本国经济的战略重点之一。 工业机械手是近几十年发展起来的一种高科技自动化生产设备。工业机械手的是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。 机械手是在机械化,自动化生产过程中发展起来的一种新型装置。在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发殿起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。 机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。 机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器,它有多个自由度,可用来搬运物体以完成在各个不同环境中工作。 1.1 机械手的分类 机械手一般分为三类:第一类是不需要人工操作的通用机械手。它是一种独立的不附属于某一主机的装置。它可以根据任务的需要编制程序,以完成各项规定的操作。它的特点是具备普通机械的性能之外,还具备通用机械、记忆智能的三元机械。第二类是需要人工才做的,称为操作机。它起源于原子、军事工业,先是通过操作机来完成特定的作业,后来发展到用无线电讯号操作机来进行探测月球等。工业中采用的锻造操作机也属于这一范畴。第三类是用专用机械手,主要附属于自动机床或自动线上,用以解决机床上下料和工件送。这种机械手在国外称为“Mechanical Hand”,它是为主机服务的,由主机驱动;除少数以外,工作程序一般是固定的,因此是专用的。
PLC实训报告 指导老师:黄勤陆黄永晶 学生:曾丽宋馨月付筱蒋亚婷刘雪敏 关键词:PLC 、机械手 目录 PLC实训报告.......................................... 错误!未指定书签。 一、实训目的......................................... 错误!未指定书签。 二、实训内容......................................... 错误!未指定书签。 1、 PLC............................................. 错误!未指定书签。 2、电磁阀.......................................... 错误!未指定书签。 3、气爪MHS2-20D ................................... 错误!未指定书签。 4、气缸............................................ 错误!未指定书签。 5、磁性开关D-C73 .................................. 错误!未指定书签。 6、稳压阀.......................................... 错误!未指定书签。 7、软件系统........................................ 错误!未指定书签。 8、机械手电气清单.................................. 错误!未指定书签。 9、机械手原理图.................................... 错误!未指定书签。 10、程序流程图..................................... 错误!未指定书签。 三、实训总结......................................... 错误!未指定书签。
机械设计课程设计说明书 六自由度机械手 TOPWORK 上海交通大学机械与动力工程学院专业机械工程与自动化 设计者: 李晶(5030209252) 李然(5030209316) 潘楷 (5030209345) 彭敏勤 (5030209347) 童幸 (5030209349) 指导老师:高雪官 2006616
、八— 刖言 在工资水平较低的中国,制造业尽管仍属于劳动力密集型,机械手的使用已经越来越普及。那些电子和汽车业 的欧美跨国公司很早就在它们设在中国的工厂中引进了自 动化生产。但现在的变化是那些分布在工业密集的华南、 华东沿海地区的中国本土制造厂也开始对机械手表现出越 来越浓厚的兴趣,因为他们要面对工人流失率高,以及交 货周期缩短带来的挑战。 机械手可以确保运转周期的一贯性,提高品质。另 外,让机械手取代普通工人从模具中取出零件不仅稳定, 而且也更加安全。同时,不断发展的模具技术也为机械手 提供了更多的市场机会。 可见随着科技的进步,市场的发展,机械手的广泛应用已渐趋可能,在未来的制造业中,越来越多的机械手将 被应用,越来越好的机械手将被创造,毫不夸张地说,机 械手是人类是走向先进制造的一个标志,是人类走向现代化、高科技进步的一个象征。因此如何设计出一个功能强大,结构稳定的机械手变成了迫在眉睫的问题。
目录 一.设计要求和功能分析 4 - ?- ■基座旋转机构轴的设计及强度校核 5 三.液压泵俯仰机构零件设计和强度校核 8 四.左右摇摆机构零件设计和强度校核 11五.连腕部俯仰机构零件设计和强度校核 14六.旋转和夹紧机构零件设计和强度校核 19七.机构各自由度的连接过程 25八.设计特色 28九.心得体会 28十.参考文献30 一. 任务分工31 十二.附录(零件及装配图)31
前言 可编程控制器是20世纪70年代以来,在集成电路,计算机技术基础上发展起来的一种新型工业控制设备。由于具有功能强、可靠性高、配置灵活、使用方便以及体积小、重量轻等优点,国外已广泛应用于自动化控制的各个领域,并已成为现实工业生产自动化的支柱产品。近年来,国内在PLC技术与产品开发应用方面发展很快,除有许多从国外引进的设备,自动化生产线外,国内的机床设备已越来越多采用PLC控制系统采用控制系统取代传统的继电—接触器控制系统小;价格上能与继电—接触器控制系统竞争;易于在现场变更程序;便于使用、维护、维修;能直接推动电磁阀,接触器与之相当的执行机构;能向中央执行机构;能向中央数据处理系统直接传播数据等。 本课题是基于PLC控制四自由度机械手运行。 工业机械手是一种模仿人体上肢部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,它可以代替手的繁重劳动,改善劳动条件,提高劳动生产率和自动化水平。有着广阔的发展前途。本课题通PLC自动控制对机械手实现机械手规定动作并实现回原点、手动方式和自动方式三种工作方式的选择,并对系统进行运行效率分析。
摘要 随着工业机械手的进一步发展,其发展将更趋向于人性化、智能化并将在更加广泛的领域得到应用。机械手是一种模仿人体上肢运动的机器,它能按照预定要求输送工种或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。因而具有强大的生命力,受到人们的广泛重视和欢迎。工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,提高劳动生产率和自动化水平。通过对机械制造与自动化大学专科三年的所学知识进行整合,对工业机械手各部分机械结构和功能的论述和分析,确定机械手的工作原理和运动机理。设计了一种四自由度机械手,采用可编程序控制器(PLC)设计其控制系统,以提高其工作的稳定性能。 关键词:机械手梯形图 PLC 电磁阀 Abstract With the further development of industrial robots, and its development tends to be more humane, intelligent and in a wider range of applications. Manipulator is a kind of imitation of the upper body movement machine, it can be scheduled according to request type or holds the automation tool operation of technical equipment, industrial automation, promote the production of industrial production of the further development plays an important role .Manipulator noted extensively and welcome by people for it has powerful vitality. Industrial robots can replace the hands of heavy labor, significantly reduce labor intensity, and improve labor productivity and automation level.Mechanical manufacturing and automation through the junior college for three years to integrate the knowledge of industrial manipulator mechanical structure and function of various parts of exposition and analysis to determine the robot motion principle and mechanism.Design a four-DOF manipulator to enhance the stability of their work for using the programmable logic controller to control system. Keywords: Manipulator Ladder diagram PLC Solenoid valve
课程设计说明书 设计名称:综合课程设计 题目:机械模型的远程控制 ——四自由度机械手 学生: 专业:机械设计制造及其自动化 班级: 学号: 指导教师: 日期:2013年12月25 日
目录 一.课程设计的主要容和任务分析 (1) 二.机构模型的的原理图及工作原理 (1) 2.1 总体工作流程 (2) 2.2 前后运动部分 (2) 2.3 左右转动部分 (3) 2.4 上下运动部分 (5) 2.5 机械手转动部分 (5) 2.6 机械手开闭合部分 (5) 三.远程控制系统的工作原理 (5) 四.慧鱼接口板的处理器操作模式的选择以及计算机与接口板的通讯 (6) 4.1 慧鱼接口板概述 (6) 4.2 微处理器的两种处理模式 (6) 4.3 计算机与接口板通讯 (7)
五.客户端程序中主要功能模块的设计过程 (8) 六.结论及心得体会 (13) 七.参考文献 (13) 一.主要容和任务分析 利用德国慧鱼公司的“智能创意教具”模型设计、装配出较有创意的机构或机械设备模型,模型完成之后应用VB开始编程以及对程序的调试最终能完成对模型的远程控制。 认真复习机械原理、机械设计、自动生产线、VB的基本知识以及学习新的知识(主要为mscomm、winsock、timer三种控件的使用)等。在实验室熟悉慧鱼模型的元件及其撘建方法,参考现有的模型基础,然后设计出有创意的机械模型。 二、机构模型的的原理图及工作原理
2.1 总体工作流程 作品拟实现的主要功能有以下五个运动:①前后运动;②左右转动; ③上下运动;④手爪顺逆时针转动;⑤手爪的开闭合。全景图如下: 2.2 前后运动部分 如图1所示,其工作过程为:向前运动时,电动机1正转,通过减速箱2减速,再通过齿轮链条3的传动将动力传到蜗杆4。此时限位开关5常开开关打开,蜗杆4旋转将底盘7向前运动,底盘到达最前端,此时,限位开关6常开关开闭合,向前运动完成,电动机1停止。向后远动时,电动机1反转,回程至限位开关4闭合时,电动机1停止。
单片机六自由度机械手控制程序 #include
void init(void); void EXT1_INT(void) { EX1=1; IT1=1; EA=1; } void EXT0_INT() { EX0=1; IT0=1; EA=1; } void EXT1_INT_SRV() interrupt 2 { i++; } //主程序 void main() { while(1) {if(k1==0) {reservo();//电机复位程序break;} } EXT1_INT();//中断初始化 if(i!=0&&i%6==0)
多自由度系统可控机构式新型机械工程设计理论与方法 摘要:机械工程是装备工业的重要组成部分,也是其主要核心。我们平常使用的机械工 程在日常的生产过程中起着非常重要的作用,不仅能够节约劳动力还能够节省时间,压缩成本等,但是随着时代的发展,社会科技的进步,现有的机械工程已不能满足工作的需要。例如:在建筑行业都会使用到的单自由度的挖掘机,随着这种挖掘机的构架比较稳定,工作效率也比较高,但是,单自由度构架下的挖掘机还是缺乏一定的灵活性。再如液压式挖掘机,虽然这种挖掘机比单自由度挖掘机更加灵活,但是液压式挖掘的使用寿命有待延长,而且其零部件的寿命也相对较短,在工作中还会出现漏油的现象。所以,现在急需一种新的可控机构,用来代替原有的可控机构,多自由度系统的设计理论很好的解决了这一问题。多自由度系统不仅仅能够整合现有的机械技术,而且还可以再利用先进的电子技术对工程设备进行设计和改造,用以满足使用者的需求,在机械工程具备的动力学特性的基础上,通过加大多自由度系统的使用,是未来机械工程的发展方向。因此,作为机械设计人员要能够明白多自由度系统可控机械的设计原理,摸索出完善的设计方法。但是,由于不同的工程对设备的性能要求方面不同,所以我国现在所拥有的工程设备并不能满足使用者的需求,并且在一定程度上存在着不足之处,作为新兴的可控机构,多自由度系统渐渐进入了人们的视线。 关键词:多自由度系统;机械工程;可控机构;理论与方法 1 可控机构应有的自由度 机构的自由度也就是指机构能够独立运动的个数,所以可控机构的自由度,一定是含有独立特性的一种参数,机构的原动件数等于机构的自由度数。一个机械能够实施的最大范围的独立变量是机构所具有的活动度,这只是相对于日常所见的衔接的机械而言。安设在机械设备上的串联机构,通过安装在机械末端的执行器,在相对于机械体系内所设置的机架,通过计算所得到的自由度,便是这一机构应有的自由度。同样,安装在机械设备上的并联机构,这种机械的自由度就等同于代动平台的应有自由度。根据我们已知的螺旋理论,通常把机械中并联机构所具有的自由度,当成螺旋系数的维度,并且这种维度也是螺旋系数所特有的,而螺旋预设的维数就是指机械架构所具有的活动度。在机械配件所拥有的架构内也有一定的自由度,其所拥有的自由度带有局部性的特点,并且不会影响到机械结构内的其他配件的功能,这是配件架构内的消极自由度。在机械构建中还存在着一些带有典型特性的自由度,一般存在与连接滚子的配件中,当然这种状况一般只会出现在平面机构中。但是在空间态势下存在的运动链,也会出现上述所说的带有典型性的自由度。在可控机构中会出现一些特有的约束,这种特有的冗余约束一般统称之为虚约束,之所以会出现这种所谓的虚约束,基本上是同机构常拥有的运动副有关,因为现在机械部件中所拥有的运动副,都是以前设计中已经设好了所需要的几何关联。所以,在可控机构中存在的一些约束,不会影响机构体系内存在的其他运动,对其他机械机构的运行不会产生其他作用,随着公共约束的消除,机构中所存在的螺旋数值,我们可以对此数值进行衡量,如果此数值大于机构原有的阶数,那么就说明机构中存在着冗余约束,另外所谓的过约束一般是包含了上述的冗余约束还包括机械的公共约束。
学号: 密级: 武汉东湖学院本科生毕业论文(设计) 三自由度并联机械手的设计 院(系)名称:机电工程学院 专业名称:机械设计制造及其自动化 学生姓名: 指导教师: 二〇一六年五月六日
郑重声明 我郑重声明:本人恪守学术道德,崇尚严谨学风,所呈交的学术论文是本人在老师的指导下,独立进行研究工作所取得的结果。除文中明确注明和引用的内容外,本论文不包含任何他人已经发表和撰写过得内容。论文为本人亲自撰写,并对所写内容负责。 本人签名: 日期:2016年5月7号
摘要 随着机器人技术的快速发展,并联机械手的应用领域越来越广,已成为当今机器人领域新的研究热点。针对并联机械手机构比传统串联机械手更复杂的问题,本文以一种轻型高速的三自由度Delta 并联机械手为例,在完成其运动学的基础上,对并联机械手进行了建模以及装配。 首先,本文介绍了三自由度并联机械手机构的工作原理,并对其进行了运动学分析。其中,对机构的自由度进行的计算,采用几何法求得了其运动学正解以及其运动学逆解。其次,对机构进行了速度模型及雅克比矩阵的分析。实现了solidworks对机构的零部件与装配图三维建模。最后,通过个零部件的配合,实现了三自由度并联机械手的装配。 关键词:并联机械手;三自由度;3D建模
ABSTRACT With the rapid development of robot technology, parallel manipulator used more and more widely, has become the hot spot in the field of new robots today. In view of the parallel manipulator mechanism more complex than the traditional serial manipulator problem, based on a lightweight high-speed three degree of freedom parallel manipulator as an example, the Delta at the completion of its kinematics, on the basis of the parallel manipulator has carried on the modeling and assembly. First, this paper introduces the working principle of three degrees of freedom parallel manipulator mechanism, and carries on the kinematics analysis. Among them, the institution of degree of freedom for the calculation of geometric method is used to obtain the positive kinematics solution and its inverse kinematics solution. Second, the institutions for the velocity model and the Jacobi matrix analysis. Implements the solidworks for spare parts and assembly drawing 3 d modeling of the organization. Finally, by a spare parts, implements the three degree of freedom parallel manipulator assembly. Keywords: Parallel manipulator;Three degrees of freedom;3D modeling
机电一体化系统设计课程设计说明书 设计题目:多自由度机械手机电系统设计学院: 专业年级:
一、总体方案设计 (3) 1.1 设计任务 (3) 1.2 总体方案确定 (3) 1.2.1机械手基本形式的选择 (3) 1.2.2机械手的主要部件及运动 (3) 1.2.3驱动机构的选择 (3) 1.2.4 机械手的技术参数列表 (3) 二、机械系统设计 (4) 2.1机械手手部的设计计算 (4) 2.1 .1手部设计基本要求 (4) 2.1.2 典型的手部结构 (4) 2.1.3机械手手抓的设计计算 (4) 2.1.4.机械手手抓夹持精度的分析计算 (8) 2.1.5弹簧的设计计算 (9) 2.2腕部的设计计算 (11) 2.2.1 腕部设计的基本要求 (11) 2.2.2典型的腕部结构 (12) 2.2.3 腕部结构和驱动机构的选择 (12) 2.2.4 腕部的设计计算 (12) 2.3臂部的设计及有关计算 (15) 2.3.1 臂部设计的基本要求 (15) 2.3.2 手臂的典型机构以及结构的选择 (16) 2.3.3 液压缸工作压力和结构的确定 (18) 2.4机身的设计计算 (19) 2.4.1 机身的整体设计 (19) 2.4.2 机身回转机构的设计计算 (20) 2.4.3 机身升降机构的计算 (23) 2.4.4 轴承的选择分析 (25) 三、控制系统硬件电路设计 (25) 3.1可编程序控器的简介 (25) 3.2 PLC的结构,种类和分类 (26) 3.3 FX2n系列三菱PLC特点 (27) 3.4 接近开关传感器 (28) 3.5 I/O接口简介 (29) 3.6 行程开关的介绍 (29) 3.6.1 行程开关的概念 (29) 3.6.2 行程开关的作用及原理 (29) 3.7电路的总体设计 (30) 3.7.1回路的设计 (30) 3.7.2 系统输入/输出分布表 (31) 3.7.3机械手的程序设计 (32) 3.7.4 步进电机的运行控制 (32) 四、参考文献 (33)
六自由度机器人结构设计、 运动学分析及仿真 学科:机电一体化 姓名:袁杰 指导老师:鹿毅 答辩日期: 2012.6 摘要 近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获 得应用。我国在机器人的研究和应用方面与工业化国家相比还有一定的差距,因此 研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是有现实意义 的。 典型的工业机器人例如焊接机器人、喷漆机器人、装配机器人等大多是固定在 生产线或加工设备旁边作业的,本论文作者在参考大量文献资料的基础上,结合项 目的要求,设计了一种小型的、固定在AGV 上以实现移动的六自由度串联机器人。 首先,作者针对机器人的设计要求提出了多个方案,对其进行分析比较,选择
其中最优的方案进行了结构设计;同时进行了运动学分析,用D-H 方法建立了坐标变换矩阵,推算了运动方程的正、逆解;用矢量积法推导了速度雅可比矩阵,并计算了包括腕点在内的一些点的位移和速度;然后借助坐标变换矩阵进行工作空间分析,作出了实际工作空间的轴剖面。这些工作为移动式机器人的结构设计、动力学分析和运动控制提供了依据。最后用ADAMS 软件进行了机器人手臂的运动学仿真,并对其结果进行了分析,对在机械设计中使用虚拟样机技术做了尝试,积累了 经验。 第1 章绪论 1.1 我国机器人研究现状 机器人是一种能够进行编程,并在自动控制下执行某种操作或移动 作业任务的机械装置。 机器人技术综合了机械工程、电子工程、计算机技术、自动控制及 人工智能等多种科学的最新研究成果,是机电一体化技术的典型代表,是当代科技发展最活跃的领域。机器人的研究、制造和应用正受到越来越多的国家的重视。近十几年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获得应用。 我国是从 20 世纪80 年代开始涉足机器人领域的研究和应用的。1986年,我国开展了“七五”机器人攻关计划。1987 年,我国的“863”计划将机器人方面的研究列入其中。目前,我国从事机器人的应用开发的主要是高校和有关科研院所。最初我国在机器人技术方面的主要