Computer Science and Application 计算机科学与应用, 2020, 10(9), 1609-1617
Published Online September 2020 in Hans. https://www.doczj.com/doc/6d8663323.html,/journal/csa
https://https://www.doczj.com/doc/6d8663323.html,/10.12677/csa.2020.109169
遗传算法与分枝定界法求解TSP研究
杨思明,王凤军
无锡商业职业技术学院,江苏无锡
收稿日期:2020年9月1日;录用日期:2020年9月11日;发布日期:2020年9月18日
摘要
在解决旅行商问题时,有两种常用的方法,即遗传算法与分枝定界法。本文使用K均值聚类改进分枝定界法,求解给定的旅行商问题。通过运用这两种算法求解TSP进行比较,相比之下K均值聚类优化的分枝定界法在解决旅行商问题中表现得更好。
关键词
旅行商问题,遗传算法,分枝定界法
Research on Solving TSP with Genetic
Algorithm or Branch and Bound
Method
Simin Yang, Fengjun Wang
Wuxi Institute of Commerce, Wuxi Jiangsu
Received: Sep. 1st, 2020; accepted: Sep. 11th, 2020; published: Sep. 18th, 2020
Abstract
When solving the traveling salesman problem, there are two commonly used methods, namely genetic algorithm method, and branch and bound method. To solve the given traveling salesman problem, this paper uses K-means clustering to improve the branch and bound method. By comparing the performance of these two algorithms in solving the TSP problem, the branch and bound method with K-means clustering performs better in solving the traveling salesman problem.
杨思明,王凤军
Keywords
Traveling Salesman Problem, Genetic Algorithm, Branch and Bound Method
Copyright ? 2020 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
https://www.doczj.com/doc/6d8663323.html,/licenses/by/4.0/
1. 引言
旅行商问题(Travelling salesman problem ,简称TSP),是由Dantzig 等人在1959年提出,给定一系列城市和每对城市之间的距离,求解访问每一座城市一次并回到起始城市的最短路程。旅行商问题在运筹学中非常重要,也是组合优化中的一个NP 难问题,在物流、旅游业中有很高的研究价值[1]。通过对参考文献进行阅读、分析发现,求解TSP 问题,最常用的算法是遗传算法和分支定界法[2] [3] [4]。因此本文选用遗传算法和分支定界法两种算法求解该问题。
2. 问题描述
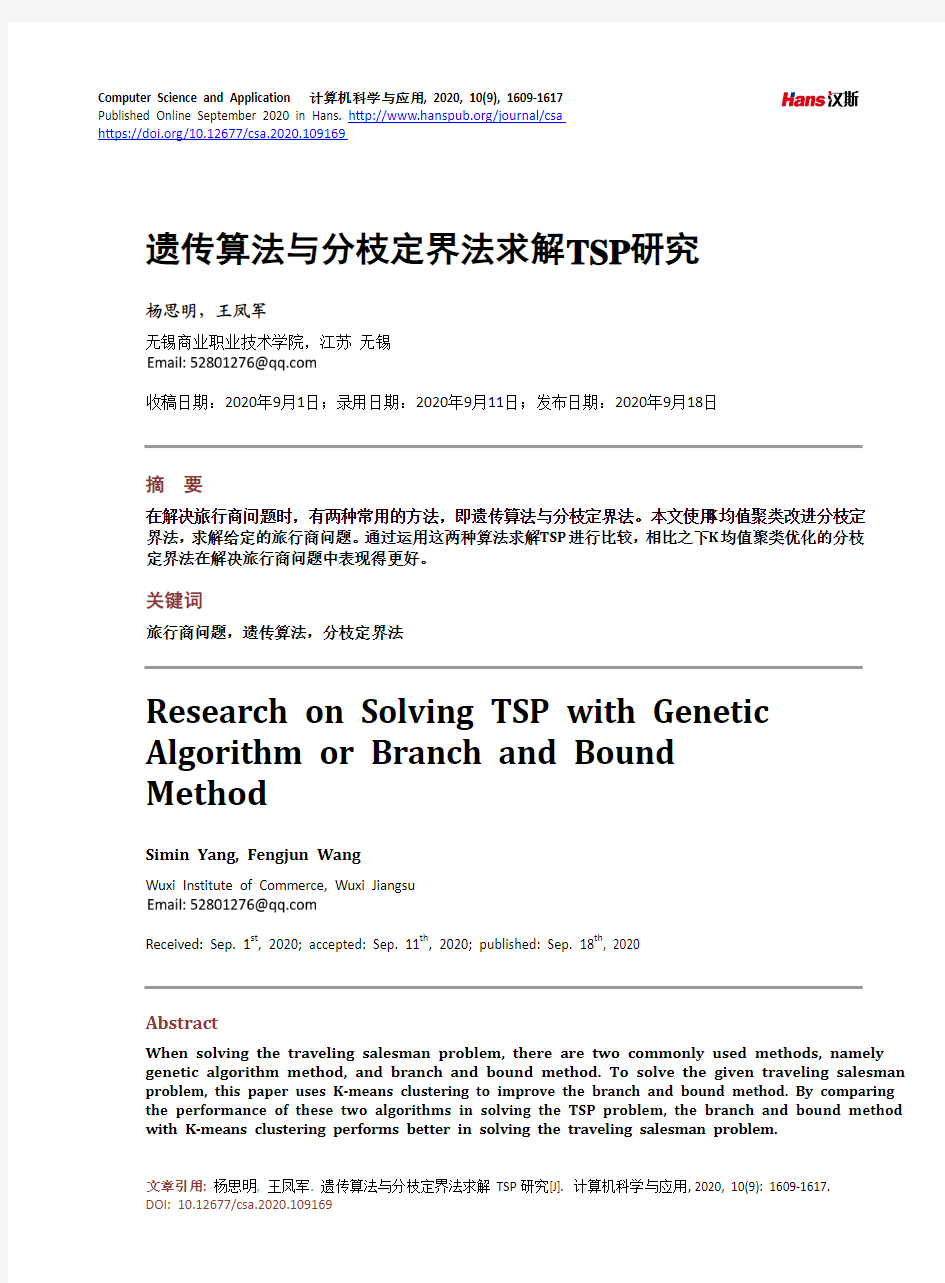
如图1所示,以位置为0,0的点为起点和终点对这76个点进行遍历。要求找到一条路径使机器人总运行时间最短。已知信息为:机器人最大运行速度1 m/s ;在每一点的停留时间与通过速度;以及每一点的坐标。
Figure 1. The distribution of cities in TSP 图1. TSP 问题城市分布图
忽略机器人的启动与刹车的加速时间,假设机器人全程运动速度为1 m/s 。则该问题的解等价于机器人通过旅行商问题求出的最短路径所需的时间加上机器人在所有点停留的时间。本文使用遗传算法与K 均值聚类改进分枝定界法求解该问题。
3. 分支定界法
分支定界法是由Richard M. Karp 在20世纪60年代发明,成功求解含有65个城市的旅行商问题,创当时的记录。这种方法不但可以求解纯整数规划,还可以求解混合整数规划问题。分支定界法是一种
Open Access
杨思明,王凤军
搜索与迭代的方法,选择不同的分支变量和子问题进行分支。
如图1所示,所需要遍历的点有76个,除去起点后,其全排列有75!种可能性。经过测试,本文所使用的计算机平台(16 G 内存,英特尔8代i7处理器)在1 h 内最多对14个城市使用分枝定界法进行求解,因此首先要对需要遍历的点进行处理,减少其数量。
假设有一个商人需要去中国,日本,美国,巴西中的几个城市送货,且这个商人希望能以最小的路程送完所有的货物。那这个商人必定在当前国家遍历完所有需要前往的城市后才会前往下一个国家。在两个国家之间的城市多次往返的路线不可能是最优解。因此在点分布不均匀的情况下,对分布密集的一些点进行合并可以减少问题的复杂度。其在本质上是排除了一些路线,其中大部分是路程非常长的路线。
本文使用聚类分析对实现对点的合并。聚类分析起源于分类学,由于人们有时难以仅凭借经验和专业知识去对事物进行分类,因此人们把数学工具引用到了分类学中并形成了数值分类学。之后随着多元分析技术的发展,人们又发展出了聚类分析。从分类指标上可以分为划分法,层次法,基于模型的方法,基于网格的方法,基于密度的方法。使用K 均值聚类将所有的点划分为指定的类数。K 均值聚类的算法需要输入分类数量K ,利用各类别中对象的均值更新聚类相似度来完成分类。其流程如下:
1. 从n 个数据对象任意选择K 个对象作为初始聚类中心。
2. 计算每个对象与聚类中心的距离;并根据最小距离重新对相应对象进行划分。
3. 重新计算每个聚类的均值作为新的聚类中心。
4. 循环2到3直到每个聚类不再发生变化为止。 对图1中76个点进行聚类分析,结果如图2~7下所示:
由上图所示,随着分类类别增加,分类结果越来越精细,成行成列以及距离相对较近的点被很好地划分进了同一类别。且各个类别内点的数量没有超过14个。求取聚类后的各类别的中心点作为各个类别的代表。将其输入到分支定界法中搜索最优路径。
分支定界算法是一种始终围绕着一颗搜索树进行的算法。其将出发点看作搜索树的根节点,从这里出发,分支的含义就是将大的问题分割成小的问题。而定界就是在分支的过程中检查子问题的上下界,如果子问题不能产生一比当前最优解还要优的解,那么砍掉这一支。直到所有子问题都不能产生一个更优的解时,算法结束[5]。算法流程如下图所示:
由图8所示,我们按顺序遍历每一种排列,并不断更新最小距离,当其中一个父节点的当前距离已经大于最小距离时就跳过该父节点。直到遍历完所有可行解后输出最优解。
Figure 2. The result of the first classification 图2. 分类结果
1
杨思明,王凤军
Figure 3. The result of the second classification 图3. 分类结果2
Figure 4. The result of the third classification 图4. 分类结果3
Figure 5. The result of the forth classification 图5. 分类结果
4
杨思明,王凤军
Figure 6. The result of the fifth classification 图6. 分类结果5
Figure 7. The result of the sixth classification 图7. 分类结果6
Figure 8. Schematic diagram of branch and bound method 图8. 分支定界法示意图
将各类别的中心点输入到分支定界算法中搜索最优路径便得到了各个集合的最优连接方式。每个集
合选出一个在最优路径上下一级集合中心点最近的点作为连接点。然后每个集合分别将上一级的连接点
杨思明,王凤军
作为起始点,自己的连接点作为终点,其余的点作为需要遍历的点输入到分枝定界法中搜索出最优路径。最后将所有路径合并便得到了一个较优解。
从图9~12可以看出聚类类别数量对整体路径影响不大,只对细微路径有些影响。由于K 均值聚类每次随机选取K 个点作为起始点,若根据城市分布人工指定起始点可能能进一步减少求解出的最短路程。理论上聚类类别数越多,实际求解过程越接近于直接用分支定界算法进行求解,则求解结果离最优解应该越近。但是经过实验结果表明在聚类类别数量与点的数量差距较大时,增加聚类数量未必能提高解的精度。考虑到求解时间与求解精度,在实际应用该方式时,可以用较少的分类类别数多次运行选取最优解,若能人工指定初始点,该方法的输出将更为稳定。
Figure 9. The final path when the number of cluster categories is 11
图9. 聚类类别为11时的最终路径
Figure 10. The final path when the number of cluster categories is 12 图10. 聚类类别为12时的最终路径
杨思明,王凤军
Figure 11. The final path when the number of cluster categories is 13 图11. 聚类类别为13时的最终路径
Figure 12. The final path when the number of cluster categories is 14 图12. 聚类类别为14时的最终路径
4. 遗传算法
遗传算法是由John Holland 于20世纪70年代根据大自然中生物体进化规律而设计提出的。该算法通过模拟自然进化中选择、交叉、变异现象来搜索最优解,并已被人们广泛地应用于组合优化、机器学习、信号处理、自适应控制和人工生命等领域[6]。遗传算法流程如图13所示,计算结果如图14所示:
在求解旅行商问题时要对遗传算法的参数编码,适应度函数,交叉方法进行设计,设计结果如下: 1. 将点的遍历顺序作为编码,即编码直接表示路径。
2. 根据每一编码计算其总路程,并用100000/log(总路程 + 1)作为适应度函数。
杨思明,王凤军
3. 在两个基因中随机选取两个交叉点,然后根据交叉点选取两个子串直接插入到对方的交叉点中。最后删掉两个后代中各自因交叉产生的重复的点。
设置种群规模为1000;运行次数为5000;淘汰率为30%,交叉概率为90%,变异概率为20%进行搜索,搜索结果如下图所示,最短时间为60381 s 。
Figure 13. The flowchart of genetic algorithm 图13. 遗传算法流程图
Figure 14. The outcome of genetic algorithm 图14. 遗传算法搜索结果
杨思明,王凤军5. 结论
遗传算法作为一种启发式算法有强的通用性,但是其随机性也很强。经常需要多次运行遗传算法才能得出一个比较理想的结果。同时,随着问题维数的增大,遗传算法需要占用很多的内存来存储基因,计算量也较大。遗传算法搜索结果受参数影响也较大。实际测试中若该问题采用10000种群规模,进化500次,其搜索结果会很差。通过两种算法求解TSP比较,显而易见,基于K均值聚类优化的分枝定界法,在上述问题求解中表现得更好。
参考文献
[1]许冲, 钟玮, 刘欣欣. 一种求解旅行商问题的演化算法研究[J]. 闽南师范大学学报(自然科学版), 2020, 33(2):
44-48.
[2]姚宇威, 邓燕妮. 混合杂草遗传算法求解旅行商问题[J]. 科学技术创新, 2020(11): 40-41.
[3]汤雅连, 杨期江. 求解旅行商问题的蚁群优化算法参数设计[J]. 东莞理工学院学报, 2020, 27(3): 48-54.
[4]陈春燕, 彭阳, 许环梓, 何宇佳, 石苗. 蚁群和遗传算法在旅行路线规划中的研究[J]. 高师理科学刊, 2020, 30(7):
33-36
[5]王兆锐, 林剑, 张俊丽, 官静萍. 基于车公里成本的多车型车辆规划方法[J]. 物流技术, 2019(1): 82-87.
[6]胡士娟, 鲁海燕, 黄洋, 等. 求解工作量平衡多旅行商问题的改进遗传算法[J]. 计算机工程与应用, 2019(17):
150-155.
实验六:遗传算法求解TSP问题实验 一、实验目的 熟悉和掌握遗传算法的原理、流程和编码策略,并利用遗传求解函数优化问题,理解求解TSP问题的流程并测试主要参数对结果的影响。用遗传算法对TSP问题进行了求解,熟悉遗传算法地算法流程,证明遗传算法在求解TSP问题时具有可行性。 二、实验内容 参考实验系统给出的遗传算法核心代码,用遗传算法求解TSP的优化问题,分析遗传算法求解不同规模TSP问题的算法性能。 对于同一个TSP问题,分析种群规模、交叉概率和变异概率对算法结果的影响。 增加1种变异策略和1种个体选择概率分配策略,比较求解同一TSP问题时不同变异策略及不同个体选择分配策略对算法结果的影响。 1. 最短路径问题 所谓旅行商问题(Travelling Salesman Problem , TSP),即最短路径问题,就是在给定的起始点S到终止点T的通路集合中,寻求距离最小的通路,这样的通路成为S点到T点的最短路径。 在寻找最短路径问题上,有时不仅要知道两个指定顶点间的最短路径,还需要知道某个顶点到其他任意顶点间的最短路径。遗传算法方法的本质是处理复杂问题的一种鲁棒性强的启发性随机搜索算法,用
遗传算法解决这类问题,没有太多的约束条件和有关解的限制,因而可以很快地求出任意两点间的最短路径以及一批次短路径。 假设平面上有n个点代表n个城市的位置, 寻找一条最短的闭合路径, 使得可以遍历每一个城市恰好一次。这就是旅行商问题。旅行商的路线可以看作是对n个城市所设计的一个环形, 或者是对一列n个城市的排列。由于对n个城市所有可能的遍历数目可达(n- 1)!个, 因此解决这个问题需要0(n!)的计算时间。假设每个城市和其他任一城市之间都以欧氏距离直接相连。也就是说, 城市间距可以满足三角不等式, 也就意味着任何两座城市之间的直接距离都小于两城市之间的间接距离。 2. 遗传算法 遗传算法是由美国J.Holland教授于1975年在他的专著《自然界和人工系统的适应性》中首先提出的,它是一类借鉴生物界自然选择和自然遗传机制的随机化搜索算法。通过模拟自然选择和自然遗传过程中发生的繁殖、交叉和基因突变现象,在每次迭代中都保留一组候选解,并按某种指标从解群中选取较优的个体,利用遗传算子(选择、交叉和变异)对这些个体进行组合,产生新一代的候选解群,重复此过程,直到满足某种收敛指标为止。遗传算法在本质上是一种不依赖具体问题的直接搜索方法,是一种求解问题的高效并行全局搜索方法。其假设常描述为二进制位串,位串的含义依赖于具体应用。搜索合适的假设从若干初始假设的群体集合开始。当前种群成员通过模仿生物进化的方式来产生下一代群体,如随机变异和交叉。每一步,根据给定的适应度评估当前群体的假设,而后使用概率方法选出适应度最高的假设作为产生下一代的种子。
题目:割平面法及其数值实现 院系:数理科学与工程学院应用数学系 专业:数学与应用数学 姓名学号:*** 1****** *** 1****** *** 1****** *** 1****** 指导教师:张世涛 日期:2015 年 6 月11 日
整数规划与线性规划有着密不可分的关系,它的一些基本算法的设计都是从相应的线性规划的最优解出发的。整数规划问题与我们的实际生活有着密切的联系,如合成下料问题、建厂问题、背包问题、投资决策问题、旅行商问题、生产顺序表问题等都是求解整数模型中的著名问题。所以要想掌握生活中这些解决问题的方法,研究整数规划是必然的路径。用于解决整数规划的方法主要有割平面法,分支定界法,小规模0-1规划问题的解法,指派问题和匈牙利法。本文重要对整数规划中经常用的割平面法加以介绍及使用Matlab 软件对其数值实现。 割平面法从线性规划问题着手,在利用单纯型法的时候,当约束矩阵中出现分数,给出一种"化分为整"的方法。然后在割平面方法来解决整数线性规划的理论基础上,把"化分为整"的方法进行到底,直到求解出最有整数解。 关键词:最优化;整数规划;割平面法;数值实现;最优解;Matlab软件。 Abstract The integer programming are closely related to the linear programming. Some of the basic algorithms of the former are designed from the optimal solution of the corresponding linear programming. What’s more, our daily life has a close relationship with it as well, such as synthesis problem, plant problem, knapsack problem, investment decision problem, traveling salesman problem and production sequence table problems. They are famous questions in solving integer model. So, to study the integer programming is the inevitable way to master the methods of solving these problems in life. The methods used in solving the integer programming include cutting plane method, branch and bound method, and solving the problem of small-scale 0-1 programming, assignment problem and Hungarian method. In this paper, we introduce the cutting plane method and use Matlab to get its numerical implementation in the integer programming. Cutting plane method, giving us a "integrated" method when we meet the constraint matrix scores in the use of simplex method, starts from the linear programming problem. Then, based on the theory of cutting plane method to solve the integer linear programming, we use “integrated” method until the most integer solution is solved. Keywords:Optimization; Integer programming; Cutting plane method; Numerical implementation; Optimal solution; Matlab software.
报告题目:基于Matlab的遗传算法解决TSP问题 说明:该文包括了基于Matlab的遗传算法解决TSP问题的基本说明,并在文后附录了实现该算法的所有源代码。此代码经过本人的运行,没有发现错误,结果比较接近理论最优值,虽然最优路径图有点交叉。 因为本人才疏学浅,本报告及源代码的编译耗费了本人较多的时间与精力,特收取下载积分,还请见谅。若有什么问题,可以私信,我们共同探讨这一问题。 希望能对需要这方面的知识的人有所帮助!
1.问题介绍 旅行商问题(Traveling Salesman Problem,简称TSP)是一个经典的组合优化问题。它可以描述为:一个商品推销员要去若干个城市推销商品,从一个城市出发,需要经过所有城市后,回到出发地,应如何选择行进路线,以使总行程最短。从图论的角度看,该问题实质是在一个带权完全无向图中。找一个权值最小的Hemilton回路。其数学描述为:设有一个城市集合其中每对城市之间的距离(),i j d c c R +∈,求一对经过C中每个城市一次的路线()12,,n c c c ΠΠΠ?使 ()()() 1111min ,,n i n i i d c c d c c ?ΠΠΠΠ+=+∑其中()12,,12n n ΠΠΠ??是,的一个置换。 2.遗传算法 2.1遗传算法基本原理 遗传算法是由美国J.Holland 教授于1975年在他的专著《自然界和人工系统的适应性》中首先提出的,它是一类借鉴生物界自然选择和自然遗传机制的随机化搜索算法。 遗传算法模拟自然选择和自然遗传过程中发生的繁殖、交叉和基因突变现象,在每次迭代中都保留一组候选解,并按某种指标从解群中选取较优的个体,利用遗传算子(选择、交叉和变异)对这些个体进行组合,产生新一代的候选解群,重复此过程,直到满足某种收敛指标为止。 遗传算法,在本质上是一种不依赖具体问题的直接搜索方法,是一种求解问题的高效并行全局搜索方法。遗传算法在模式识别、神经网络、图像处理、机器学习、工业优化控制、自适应控制、负载平衡、电磁系统设计、生物科学、社会科学等方面都得到了应用。在人工智能研究中,现在人们认为“遗传算法、自适应系统、细胞自动控制、混沌理论与人工智能一样,都是对今后十年的计算技术有重大影响的关键技术”。 2.2遗传算法的流程 标准的遗传算法包括群体的初始化,选择,交叉,变异操作。流程图如图1所示,其主要步骤可描述如下: (1)随机产生一组初始个体构成的初始种群,并评价每一个个体的适配值。 (2)判断算法的收敛准则是否满足。若满足输出搜索结果;否则执行以下步骤。
遗传算法解决TSP问题 姓名: 学号: 专业:
问题描叙 TSP问题即路径最短路径问题,从任意起点出发(或者固定起点),依次经过所有城市,一个城市只能进入和出去一次,所有城市必须经过一次,经过终点再到起点,从中寻找距离最短的通路。 通过距离矩阵可以得到城市之间的相互距离,从距离矩阵中的到距离最短路径,解决TSP问题的算法很多,如模拟退火算法,禁忌搜索算法,遗传算法等等,每个算法都有自己的优缺点,遗传算法收敛性好,计算时间少,但是得到的是次优解,得不到最有解。 算法设计 遗传算法属于进化算法的一种,它通过模仿自然界的选择与遗传的机理来寻找最优解. 遗传算法有三个基本算子:选择、交叉和变异。 数值方法求解这一问题的主要手段是迭代运算。一般的迭代方法容易陷入局部极小的陷阱而出现"死循环"现象,使迭代无法进行。遗传算法很好地克服了这个缺点,是一种全局优化算法。 生物在漫长的进化过程中,从低等生物一直发展到高等生物,可以说是一个绝妙的优化过程。这是自然环境选择的结果。人们研究生物进化现象,总结出进化过程包括复制、杂交、变异、竞争和选择。一些学者从生物遗传、进化的过程得到启发,提出了遗传算法。算法中称遗传的生物体为个体,个体对环境的适应程度用适应值(fitness)表示。适应值取决于个体的染色体,在算法中染色体常用一串数字表示,数字串中的一位对应一个基因。一定数量的个体组成一个群体。对所有个体进行选择、交叉和变异等操作,生成新的群体,称为新一代遗传算法计算程序的流程可以表示如下: 第一步准备工作 (1)选择合适的编码方案,将变量(特征)转换为染色体(数字串,串长为m)。通常用二进制编码。 (2)选择合适的参数,包括群体大小(个体数M)、交叉概率PC和变异概率Pm。 (3)确定适应值函数f(x)。f(x)应为正值。 第二步形成一个初始群体(含M个个体)。在边坡滑裂面搜索问题中,取已分析的可能滑裂面组作为初始群体。 第三步对每一染色体(串)计算其适应值fi,同时计算群体的总适应值。 第四步选择
1.遗传算法解决TSP 问题(附matlab源程序) 2.知n个城市之间的相互距离,现有一个推销员必须遍访这n个城市,并且每个城市 3.只能访问一次,最后又必须返回出发城市。如何安排他对这些城市的访问次序,可使其 4.旅行路线的总长度最短? 5.用图论的术语来说,假设有一个图g=(v,e),其中v是顶点集,e是边集,设d=(dij) 6.是由顶点i和顶点j之间的距离所组成的距离矩阵,旅行商问题就是求出一条通过所有顶 7.点且每个顶点只通过一次的具有最短距离的回路。 8.这个问题可分为对称旅行商问题(dij=dji,,任意i,j=1,2,3,…,n)和非对称旅行商 9.问题(dij≠dji,,任意i,j=1,2,3,…,n)。 10.若对于城市v={v1,v2,v3,…,vn}的一个访问顺序为t=(t1,t2,t3,…,ti,…,tn),其中 11.ti∈v(i=1,2,3,…,n),且记tn+1= t1,则旅行商问题的数学模型为: 12.min l=σd(t(i),t(i+1)) (i=1,…,n) 13.旅行商问题是一个典型的组合优化问题,并且是一个np难问题,其可能的路径数目 14.与城市数目n是成指数型增长的,所以一般很难精确地求出其最优解,本文采用遗传算法 15.求其近似解。 16.遗传算法: 17.初始化过程:用v1,v2,v3,…,vn代表所选n个城市。定义整数pop-size作为染色体的个数 18.,并且随机产生pop-size个初始染色体,每个染色体为1到18的整数组成的随机序列。 19.适应度f的计算:对种群中的每个染色体vi,计算其适应度,f=σd(t(i),t(i+1)). 20.评价函数eval(vi):用来对种群中的每个染色体vi设定一个概率,以使该染色体被选中 21.的可能性与其种群中其它染色体的适应性成比例,既通过轮盘赌,适应性强的染色体被 22.选择产生后台的机会要大,设alpha∈(0,1),本文定义基于序的评价函数为eval(vi)=al 23.pha*(1-alpha).^(i-1) 。[随机规划与模糊规划] 24.选择过程:选择过程是以旋转赌轮pop-size次为基础,每次旋转都为新的种群选择一个 25.染色体。赌轮是按每个染色体的适应度进行选择染色体的。 26.step1 、对每个染色体vi,计算累计概率qi,q0=0;qi=σeval(vj) j=1,…,i;i=1, 27.…pop-size. 28.step2、从区间(0,pop-size)中产生一个随机数r; 29.step3、若qi-1 step4、重复step2和step3共pop-size次,这样可以得到pop-size个复制的染色体。 30.grefenstette编码:由于常规的交叉运算和变异运算会使种群中产生一些无实际意义的 31.染色体,本文采用grefenstette编码《遗传算法原理及应用》可以避免这种情况的出现 32.。所谓的grefenstette编码就是用所选队员在未选(不含淘汰)队员中的位置,如: 33.8 15 2 16 10 7 4 3 11 14 6 12 9 5 18 13 17 1 34.对应: 35.8 14 2 13 8 6 3 2 5 7 3 4 3 2 4 2 2 1。 36.交叉过程:本文采用常规单点交叉。为确定交叉操作的父代,从到pop-size重复以下过 37.程:从[0,1]中产生一个随机数r,如果r 将所选的父代两两组队,随机产生一个位置进行交叉,如: 38.8 14 2 13 8 6 3 2 5 7 3 4 3 2 4 2 2 1 39. 6 12 3 5 6 8 5 6 3 1 8 5 6 3 3 2 1 1 40.交叉后为: 41.8 14 2 13 8 6 3 2 5 1 8 5 6 3 3 2 1 1 42. 6 12 3 5 6 8 5 6 3 7 3 4 3 2 4 2 2 1 43.变异过程:本文采用均匀多点变异。类似交叉操作中选择父代的过程,在r 选择多个染色体vi作为父代。对每一个 选择的父代,随机选择多个位置,使其在每位置
分支定界法和割平面法 在上学期课程中学习的线性规划问题中,有些最优解可能是分数或消失,但现实中某些 具体的问题,常要求最优解必须是整数,这样就有了对于整数规划的研究。 整数规划有以下几种分类:(1)如果整数规划中所有的变量都限制为(非负)整数,就 称为纯整数规划或全整数规划;(2)如果仅一部分变量限制为整数,则称为混合整数规划; (3)整数规划还有一种特殊情形是0-1规划,他的变量取值仅限于0或1。本文就适用于 纯整数线性规划和混合整数线性规划求解的分支定界法和割平面法,做相应的介绍。 一、分支定界法 在求解整数规划是,如果可行域是有界的,首先容易想到的方法就是穷举变量的所有可行的整数组合,然后比较它们的目标函数值以定出最优解。对于小型问题,变量数量很少,可行的整数组合数也是很小时,这个方法是可行的,也是有效的。而对于大型的问题,可行的整数组合数很大时,这种方法就不可取了。所以我们的方法一般是仅检查可行的整数组合的一部分,就能定出最有的整数解。分支定界法就是其中一个。 分枝定界法可用于解纯整数或混合的整数规划问题。在二十世纪六十年代初 由Land Doig和Dakin等人提出。由于这方法灵活且便于用计算机求解,所以现在它已是解整数规划的重要方法。目前已成功地应用于求解生产进度问题、旅行推销员问题、工厂选址问题、背包问题及分配问题等。 设有最大化的整数规划问题A,与它相应的线性规划为问题B,从解问题B开始,若其最优解不符合A的整数条件,那么B的最优目标函数必是A的最优目标函数z*的上界,记作z ;而A的任意可行解的目标函数值将是z*的一个下界z。分枝定界法就是将B的可行域分成子区域再求其最大值的方法。逐步减小z和增大z,最终求到z*。现用下例来说明:例1求解下述整数规划 Max z = 40x「90x2 9X1 7X2 -56 7X1 20X2 - 70 x1,x2 -0 且为整数 解(1)先不考虑整数限制,即解相应的线性规划B,得最优解为: 洛=4.81,x2= 1.82, z 二356 可见它不符合整数条件。这时z是问题A的最优目标函数值z*的上界,记作z。而X1=0, X2=0显然是问题A的一个整数可行解,这时z = 0,是z*的一个下界,记作z,即0w z*< 356。 (2)因为X1X2当前均为非整数,故不满足整数要求,任选一个进行分枝。设选X1进行分枝,于是对原问题增加两个约束条件: x, -〔4.81 丨-4“ 一〔4.811 1 =5 于是可将原问题分解为两个子问题B1和B2 (即两支),给每支增加一个约束条件并不影响问题
TSP问题的遗传算法求解 一、问题描述 假设有一个旅行商人要拜访N个城市,要求他从一个城市出发,每个城市最多拜访一次,最后要回到出发的城市,保证所选择的路径长度最短。 二、算法描述 (一)算法简介 遗传算法(GeneticAlgorithm)是模拟达尔文生物进化论的自然选择和遗传学机理的生物进化过程的计算模型,通过模拟自然进化过程搜索最优解。遗传算法是从代表问题可能潜在的解集的一个种群(population)开始的,初代种群产生之后,按照适者生存和优胜劣汰的原理,逐代(generation)演化产生出越来越好的近似解,在每一代,根据问题域中个体的适应度(fitness)大小选择个体,并借助于自然遗传学的遗传算子(geneticoperators)进行组合交叉(crossover)和变异(mutation),产生出代表新的解集的种群。这个过程将导致种群像自然进化一样的后生代种群比前代更加适应于环境,末代种群中的最优个体经过解码(decoding),可以作为问题近似最优解。(摘自百度百科)。 (二)遗传算子 遗传算法中有选择算子、交叉算子和变异算子。 选择算子用于在父代种群中选择进入下一代的个体。 交叉算子用于对种群中的个体两两进行交叉,有Partial-MappedCrossover、OrderCrossover、Position-basedCrossover等交叉算子。 变异算子用于对种群中的个体进行突变。 (三)算法步骤描述 遗传算法的基本运算过程如下: 1.初始化:设置进化代数计数器t=0、设置最大进化代数T、交叉概率、变异概率、随机生成M个个体作为初始种群P 2.个体评价:计算种群P中各个个体的适应度 3.选择运算:将选择算子作用于群体。以个体适应度为基础,选择最优个体直接遗传到下一代或通过配对交叉产生新的个体再遗传到下一代 4.交叉运算:在交叉概率的控制下,对群体中的个体两两进行交叉 5.变异运算:在变异概率的控制下,对群体中的个体两两进行变异,即对某一个体的基因进行随机调整 6.经过选择、交叉、变异运算之后得到下一代群体P1。 重复以上1-6,直到遗传代数为T,以进化过程中所得到的具有最大适应度个体作为最优解输出,终止计算。 三、求解说明 (一)优化目标 给定二维数据int[][]pos用于存储各个城市的坐标,采用欧式距离代表城市之间的距离。利用遗传算法,找到不重复遍历所有城市的路径中,所走距离最短的路径。 (二)选择算子 选择算子采用轮盘赌选择,以每个个体的适应度为基础,为每个个体计算累积概率。
1、概念: 分支定界算法(Branch and bound,简称为BB、B&B, or BnB)始终围绕着一颗搜索树进行的,我们将原问题看作搜索树的根节点,从这里出发,分支的含义就是将大的问题分割成小的问题。大问题可以看成是搜索树的父节点,那么从大问题分割出来的小问题就是父节点的子节点了。分支的过程就是不断给树增加子节点的过程。而定界就是在分支的过程中检查子问题的上下界,如果子问题不能产生一比当前最优解还要优的解,那么砍掉这一支。直到所有子问题都不能产生一个更优的解时,算法结束。 2、例子: 用BB算法求解下面的整数规划模型 因为求解的是最大化问题,我们不妨设当前的最优解BestV为-INF,表示负无穷。 1.
首先从主问题分出两支子问题: 通过线性松弛求得两个子问题的upper bound为Z_LP1 = 12.75,Z_LP2 = 12.2。由于Z_LP1 和Z_LP2都大于BestV=-INF,说明这两支有搞头,继续往下。 2. 3.
从节点1和节点2两个子问题再次分支,得到如下结果: 子问题3已经不可行,无需再理。子问题4通过线性松弛得到最优解为10,刚好也符合原问题0的所有约束,在该支找到一个可行解,更新BestV = 10。 子问题5通过线性松弛得到upper bound为11.87>当前的BestV = 10,因此子问题5还有戏,待下一次分支。而子问题6得到upper bound为9<当前的BestV = 10,那么从该支下去找到的解也不会变得更好,所以剪掉! 4.
对节点5进行分支,得到: 子问题7不可行,无需再理。子问题8得到一个满足原问题0所有约束的解,但是目标值为4<当前的BestV=10,所以不更新BestV,同时该支下去也不能得到更好的解了。 6.
Linprogdis子程序: function [x,fval,exitflag,output,lambda]=... linprogdis(ifint,f,A,b,Aeq,beq,lb,ub,x0,options) %Title: % 分支定届法求解混合整数线性规划模型 % %初步完成:2002年12月 %最新修订: 2004-03-06 %最新注释:2004-11-20 %数据处理 [t1,t2] = size(b); if t2~=1, b=b';%将b转置为列向量 end %调用线性规划求解 [x,fval,exitflag,output,lambda] = linprog(f,A,b,Aeq,beq,lb,ub,x0,options); if exitflag<=0,%如果线性规划失败,则本求解也失败 return end %得到有整数约束的决策变量的序号 v1=find(ifint==1);%整数变量的index tmp=x(v1);%【整数约束之决策变量】的当前值 if isempty(tmp), %无整数约束,则是一般的线性规划,直接返回即可 return end v2=find(checkint(tmp)==0);%寻找不是整数的index if isempty(v2), %如果整数约束决策变量确实均为整数,则调用结束 return end %第k个决策变量还不是整数解 %注意先处理第1个不满足整数约束的决策变量 k=v1(v2(1)); %分支1:左分支 tmp1=zeros(1,length(f));%线性约束之系数向量 tmp1(k)=1; low=floor(x(k)); %thisA 分支后实际调用线性规划的不等式约束的系数矩阵A %thisb 分支后实际调用线性规划的不等式约束向量b if ifrowinmat([tmp1,low],[A,b])==1 %如果分支的约束已经存在旧的A,b中,则不改变约束 thisA= A; thisb= b;
第5 章分枝定界 任何美好的事情都有结束的时候。现在我们学习的是本书的最后一章。幸运的是,本章用到的大部分概念在前面各章中已作了介绍。类似于回溯法,分枝定界法在搜索解空间时,也经常使用树形结构来组织解空间(常用的树结构是第1 6章所介绍的子集树和排列树)。然而与回溯法不同的是,回溯算法使用深度优先方法搜索树结构,而分枝定界一般用宽度优先或最小耗费方法来搜索这些树。本章与第1 6章所考察的应用完全相同,因此,可以很容易比较回溯法与分枝定界法的异同。相对而言,分枝定界算法的解空间比回溯法大得多,因此当内存容量有限时,回溯法成功的可能性更大。 算法思想 分枝定界(branch and bound)是另一种系统地搜索解空间的方法,它与回溯法的主要区别在于对E-节点的扩充方式。每个活节点有且仅有一次机会变成E-节点。当一个节点变为E-节点时,则生成从该节点移动一步即可到达的所有新节点。在生成的节点中,抛弃那些不可能导出(最优)可行解的节点,其余节点加入活节点表,然后从表中选择一个节点作为下一个E-节点。从活节点表中取出所选择的节点并进行扩充,直到找到解或活动表为空,扩充过程才结束。 有两种常用的方法可用来选择下一个E-节点(虽然也可能存在其他的方法): 1) 先进先出(F I F O)即从活节点表中取出节点的顺序与加入节点的顺序相同,因此活节点表的性质与队列相同。 2) 最小耗费或最大收益法在这种模式中,每个节点都有一个对应的耗费或收益。如果查找一个具有最小耗费的解,则活节点表可用最小堆来建立,下一个E-节点就是具有最小耗费的活节点;如果希望搜索一个具有最大收益的解,则可用最大堆来构造活节点表,下一个E-节点是具有最大收益的活节点。 例5-1 [迷宫老鼠] 考察图16-3a 给出的迷宫老鼠例子和图1 6 - 1的解空间结构。使用F I F O分枝定界,初始时取(1,1)作为E-节点且活动队列为空。迷宫的位置( 1 , 1)被置为1,以免再次返回到这个位置。(1,1)被扩充,它的相邻节点(1,2)和(2,1)加入到队列中(即活节点表)。为避免再次回到这两个位置,将位置(1,2)和(2,1)置为1。此时迷宫如图1 7 - 1 a所示,E-节点(1,1)被删除。 节点(1,2)从队列中移出并被扩充。检查它的三个相邻节点(见图1 6 - 1的解空间),只有(1,3)是可行的移动(剩余的两个节点是障碍节点),将其加入队列,并把相应的迷宫位置置为1,所得到的迷宫状态如图17-1b 所示。节点(1,2)被删除,而下一个E-节点(2,1)将会被取出,当此节点被展开时,节点(3,1)被加入队列中,节点(3,1)被置为1,节点(2,1)被删除,所得到的迷宫如图17-1c 所示。此时队列中包含(1,3)和(3,1)两个节点。随后节点(1,3)变成下一个E-节点,由于此节点不能到达任何新的节点,所以此节点即被删除,节点(3,1)成为新的E-节点,将队列清空。节点(3,1)展开,(3,2)被加入队列中,而(3,1)被删除。(3,2)变为新的E-节点,展开此节点后,到达节点(3,3),即迷宫的出口。 使用F I F O搜索,总能找出从迷宫入口到出口的最短路径。需要注意的是:利用回溯法找到的路径却不一定是最短路径。有趣的是,程序6 - 11已经给出了利用F I F O分枝定界搜索从迷宫的(1,1)位置到(n,n)位置的最短路径的代码。 例5-2 [0/1背包问题] 下面比较分别利用F I F O分枝定界和最大收益分枝定界方法来解决如下背包问题:n=3, w=[20,15,15], p=[40,25,25], c= 3 0。F I F O分枝定界利用一个队列来记录活节点,节点将按照F I F O顺序从队列中取出;而最大收益分枝定界使用一个最大堆,其中的E-节点按照每个活节点收益值的降序,或是按照活节点任意子树的叶节点所能获得的收益估计值的降序从队列中取出。本例所使用的背包问题与例1 6 . 2相同,并且有相同的解空间树。 使用F I F O分枝定界法搜索,初始时以根节点A作为E-节点,此时活节点队列为空。当节点 A展开时,生成了节点B和C,由于这两个节点都是可行的,因此都被加入活节点队列中,节点A被删除。下一个E-节点是B,展开它并产生了节点D和E,D是不可行的,被删除,而E被加入队列中。下一步节点C成为E-节点,它展开后生成节点F和G,两者都是可行节点,加入队列中。下一个E-节点E生成节点J和K,J不可行而被删除,K是一个可行的叶节点,并产生一个到目前为止可行的解,它的收益值为4 0。 下一个E-节点是F,它产生两个孩子L、M,L代表一个可行的解且其收益值为5 0,M代表另一个收益值为1 5的可行解。G是最后一个E-节点,它的孩子N和O都是可行的。由于活节点队列变为空,因此搜索过程终止,最佳解的收益值为5 0。 可以看到,工作在解空间树上的F I F O分枝定界方法非常象从根节点出发的宽度优先搜索。它们的主要区别是在F I F O
用遗传算法解决旅行商问题 姓名:王晓梅 学号:1301281 班级:系统工程6班
一、问题背景 有一个销售员,要到n 个城市推销商品,他要找出一个包含所有n 个城市的具有最短路程的环路。 现在假设有10个城市,他们之间的距离如下。 { 0, 107, 241, 190, 124, 80, 316, 76, 152, 157}, { 107, 0, 148, 137, 88, 127, 336, 183, 134, 95}, { 241, 148, 0, 374, 171, 259, 509, 317, 217, 232}, { 190, 137, 374, 0, 202, 234, 222, 192, 248, 42}, { 124, 88, 171, 202, 0, 61, 392, 202, 46, 160}, { 80, 127, 259, 234, 61, 0, 386, 141, 72, 167}, { 316, 336, 509, 222, 392, 386, 0, 233, 438, 254}, { 76, 183, 317, 192, 202, 141, 233, 0, 213, 188}, { 152, 134, 217, 248, 46, 72, 438, 213, 0, 206}, { 157, 95, 232, 42, 160, 167, 254, 188, 206, 0} 将这10个城市分别编码为0,1,2,3,4,5,6,7,8,9。要求走完这10个城市,目标是使走的距离最短。 二、建立模型 ),...,1,(1) ,...,1,(1. .)(min 11 11n j j i n i j i t s j i n j ij n i ij ij n i n j ij x x d x =≠==≠=≠∑∑∑∑==== 三、设计算法 1、种群初始化 (1)一条染色体的初始化 10个城市分别对应0~9这十个数,每个染色体代表一个解决方法,即0~9这十个数的一种排序方式,可随机产生一个数,用取余的方法得到一个0~9的数,依次得到与前面不重复的十个数,构成一个染色体。 (2)种群的初始化 这里假设种群有100个染色体,也就是循环100次染色体的初始化可得到一个种群。
整数规划分支定界法MATLAB 程序 1.这种方法绝对能都解出答案,而且答案正确function [x,val]=fzdj(n,f,a,b,aeq,beq,lb,ub) x=zeros(n,1); x1=zeros(n,1); m1=2; m2=1; [x1,val1]=linprog(f,a,b,aeq,beq,lb,ub); if (x1==0) x=x1; val=val1; elseif (round(x1)==x1) x=x1; val=val1; else e1={0,a,b,aeq,beq,lb,ub,x1,val1}; e(1,1)={e1}; zl=0; zu=-val1; while (zu~=zl) for c=1:1:m2 if (m1~=2) if (cell2mat(e{m1-1,c}(1))==1) e1={1,[],[],[],[],[],[],[],0}; e(m1,c*2-1)={e1}; e(m1,c*2)={e1}; continue; end; end; x1=cell2mat(e{m1-1,c}(8)); x2=zeros(n,1); s=0; s1=1; s2=1; lb1=cell2mat(e{m1-1,c}(6)); ub1=cell2mat(e{m1-1,c}(7)); lb2=cell2mat(e{m1-1,c}(6)); ub2=cell2mat(e{m1-1,c}(7)); for d=1:1:n if (abs((round(x1(d))-x1(d)))>0.0001)&(s==0) s=1; lb1(d)=fix(x1(d))+1; if (a*lb1<=b) s1=0; end; ub2(d)=fix(x1(d)); if (a*lb2<=b) s2=0; end; end; end; e1={s1,a,b,aeq,beq,lb1,ub1,[],0}; e2={s2,a,b,aeq,beq,lb2,ub2,[],0}; e(m1,c*2-1)={e1}; e(m1,c*2)={e2}; end; m1=m1+1;
人工智能实验报告 实验六遗传算法实验II 一、实验目的: 熟悉和掌握遗传算法的原理、流程和编码策略,并利用遗传求解函数优化问题,理解求解TSP 问题的流程并测试主要参数对结果的影响。 二、实验原理: 旅行商问题,即TSP问题(Traveling Salesman Problem)是数学领域中著名问题之一。假设有一个旅行商人要拜访n个城市,他必须选择所要走的路径,路经的限制是每个城市只能拜访一次,而且最后要回到原来出发的城市。路径的选择目标是要求得的路径路程为所有路径之中的最小值。TSP问题是一个组合优化问题。该问题可以被证明具有NPC计算复杂性。因此,任何能使该问题的求解得以简化的方法,都将受到高度的评价和关注。 遗传算法的基本思想正是基于模仿生物界遗传学的遗传过程。它把问题的参数用基因代表,把问题的解用染色体代表(在计算机里用二进制码表示),从而得到一个由具有不同染色体的个体组成的群体。这个群体在问题特定的环境里生存竞争,适者有最好的机会生存和产生后代。后代随机化地继承了父代的最好特征,并也在生存环境的控制支配下继续这一过程。群体的染色体都将逐渐适应环境,不断进化,最后收敛到一族最适应环境的类似个体,即得到问题最优的解。要求利用遗传算法求解TSP问题的最短路径。 三、实验内容: 1、参考实验系统给出的遗传算法核心代码,用遗传算法求解TSP的优化问题,分析遗传算法求解不同规模TSP问题的算法性能。 2、对于同一个TSP问题,分析种群规模、交叉概率和变异概率对算法结果的影响。 3、增加1种变异策略和1种个体选择概率分配策略,比较求解同一TSP问题时不同变异策略及不同个体选择分配策略对算法结果的影响。 4、上交源代码。 四、实验报告要求: 1、画出遗传算法求解TSP问题的流程图。 开始初始化种群(随机产生城市坐标确定种群规模、迭代次数、个体选择式、交叉概率、变异概率计算染 色体适应度值(城市间的欧氏距离按某个选择概率选择个YE个体交个体变P迭代总次N输入适应度最高的结
分支定界法和割平面法 在上学期课程中学习的线性规划问题中,有些最优解可能是分数或消失,但现实中某些具体的问题,常要求最优解必须是整数,这样就有了对于整数规划的研究。 整数规划有以下几种分类:(1)如果整数规划中所有的变量都限制为(非负)整数,就称为纯整数规划或全整数规划;(2)如果仅一部分变量限制为整数,则称为混合整数规划;(3)整数规划还有一种特殊情形是0-1规划,他的变量取值仅限于0或1。本文就适用于纯整数线性规划和混合整数线性规划求解的分支定界法和割平面法,做相应的介绍。 一、分支定界法 在求解整数规划是,如果可行域是有界的,首先容易想到的方法就是穷举变量的所有可行的整数组合,然后比较它们的目标函数值以定出最优解。对于小型问题,变量数量很少,可行的整数组合数也是很小时,这个方法是可行的,也是有效的。而对于大型的问题,可行的整数组合数很大时,这种方法就不可取了。所以我们的方法一般是仅检查可行的整数组合的一部分,就能定出最有的整数解。分支定界法就是其中一个。 分枝定界法可用于解纯整数或混合的整数规划问题。在二十世纪六十年代初由Land Doig 和Dakin 等人提出。由于这方法灵活且便于用计算机求解,所以现在它已是解整数规划的重要方法。目前已成功地应用于求解生产进度问题、旅行推销员问题、工厂选址问题、背包问题及分配问题等。 设有最大化的整数规划问题A ,与它相应的线性规划为问题B ,从解问题B 开始,若其最优解不符合A 的整数条件,那么B 的最优目标函数必是A 的最优目标函数z *的上界,记作z ;而A 的任意可行解的目标函数值将是z *的一个下界z 。分枝定界法就是将B 的可行域分成子区域再求其最大值的方法。逐步减小z 和增大z ,最终求到z *。现用下例来说明: 例1 求解下述整数规划 219040Max x x z += ??? ??≥≥+≤+且为整数0,7020756792 12121x x x x x x 解 (1)先不考虑整数限制,即解相应的线性规划B ,得最优解为: 124.81, 1.82,356 x x z === 可见它不符合整数条件。这时z 是问题A 的最优目标函数值z *的上界,记作z 。而X 1=0,X 2=0显然是问题A 的一个整数可行解,这时0=z ,是z * 的一个下界,记作z ,即0≤z *≤356 。 (2)因为X 1X 2当前均为非整数,故不满足整数要求,任选一个进行分枝。设选X 1进行分枝,于是对原问题增加两个约束条件: [][]114.814, 4.8115 x x ≤=≥+= 于是可将原问题分解为两个子问题B 1和B 2(即两支),给每支增加一个约束条件并不影响问题A 的可行域,不考虑整数条件解问题B 1和 B 2 ,称此为第一次迭代。得到最优解
基于遗传算法的TSP问题解决 —余小欢B07330230 概述:TSP问题是一个经典的运筹学的组合优化问题,针对此问题,研究人员提出了个中各样的算法,主要有贪婪算法,遗传算法,混沌搜索算法等。在本文中分别用贪婪算法和遗传算法去解决30个城市的最短路径问题,并把两者得到了最优解进行比较,发现用遗传算法解决TSP问题非常具有优越性,同时在文章的最后提出了对此遗传算法进行改进的方向。 1.贪婪算法 x=[18 87 74 71 25 58 4 13 18 24 71 64 68 83 58 54 51 37 41 2 7 22 25 62 87 91 83 41 45 44]; y=[54 76 78 71 38 35 50 40 40 40 42 44 60 58 69 69 62 67 84 94 99 64 60 62 32 7 38 46 26 21 35]; a=zeros(30,30); for i=1:30 for j=1:30 a(i,j)=sqrt((x(i)-x(j))^2+(y(i)-y(j))^2); %求取距离矩阵的值end a(i,i)=1000; %主对角线上的元素置为1000作为惩罚 end b=0; c=zeros(30); for j=1:30 [m,n]=min(a(:,j)); b=b+m; %得到的b值即为贪婪最佳路径的总距离 a(n,:)=1000; %已经选择的最小值对应的行的所有值置为1000作为惩罚 c(j)=n; end x1=zeros(30); y1=zeros(30); for t=1:30
x1(t)=x(c(t)); y1(t)=y(c(t)); end plot(x1,y1,'-or'); xlabel('X axis'), ylabel('Y axis'), title('ì°à·?·??'); axis([0,1,0,1]); axis([0,100,0,100]); axis on 用贪婪算法得出的最佳路径走遍30个城市所走的路程为449.3845km 其具体的路径图如下: 2.遗传算法 1主函数部分 clc; clear all;
分支定界(branchand bound)算法是一种在问题的解空间树上搜索问题的解的方法。但与回溯算法不同,分支定界算法采用广度优先或最小耗费优先的方法搜索解空间树,并且,在分支定界算法中,每一个活结点只有一次机会成为扩展结点。 利用分支定界算法对问题的解空间树进行搜索,它的搜索策略是: 1.产生当前扩展结点的所有孩子结点; 2.在产生的孩子结点中,抛弃那些不可能产生可行解(或最优解)的结点; 3.将其余的孩子结点加入活结点表; 4.从活结点表中选择下一个活结点作为新的扩展结点。 如此循环,直到找到问题的可行解(最优解)或活结点表为空。 从活结点表中选择下一个活结点作为新的扩展结点,根据选择方式的不同,分支定界算法通常可以分为两种形式: 1.FIFO(First In First Out)分支定界算法: 按照先进先出原则选择下一个活结点作为扩展结点,即从活结点表中取出结点的顺序与加入结点的顺序相同。 2.最小耗费或最大收益分支定界算法: 在这种情况下,每个结点都有一个耗费或收益。如果要查找一个具有最小耗费的解,那么要选择的下一个扩展结点就是活结点表中具有最小耗费的活结点;如果要查找一个具有最大收益的解,那么要选择的下一个扩展结点就是活结点表中具有最大收益的活结点。 又称分支定界搜索法。过程系统综合的一类方法。该法是将原始问题分解,产生一组子问题。分支是将一组解分为几组子解,定界是建立这些子组解的目标函数的边界。如果某一子组的解在这些边界之外,就将这一子组舍弃(剪枝)。
分支定界法原为运筹学中求解整数规划(或混合整数规划)问题的一种方法。用该法寻求整数最优解的效率很高。将该法原理用于过程系统综合可大大减少需要计算的方案数日。 分支定界法的思想是: 首先确定目标值的上下界,边搜索边减掉搜索树的某些支,提高搜索效率。 在竞赛中,我们有时会碰到一些题目,它们既不能通过建立数学模型解决,又没有现成算法可以套用,或者非遍历所有状况才可以得出正确结果。这时,我们就必须采用搜索算法来解决问题。 搜索算法按搜索的方式分有两类,一类是深度优先搜索,一类是广度优先搜索。 我们知道,深度搜索编程简单,程序简洁易懂,空间需求也比较低,但是这种方法的时间复杂度往往是指数级的,倘若不加优化,其时间效率简直无法忍受;而广度优先搜索虽然时间复杂度比前者低一些,但其庞大的空间需求量又往往让人望而却步。 所以,对程序进行优化,就成为搜索算法编程中最关键的一环。 本文所要讨论的便是搜索算法中优化程序的一种基本方法棗“剪枝”。 什么是剪枝 相信刚开始接触搜索算法的人,都做过类似迷宫这样的题目吧。我们在“走迷宫”的时候,一般回溯法思路是这样的: 1、这个方向有路可走,我没走过 2、往这个方向前进 3、是死胡同,往回走,回到上一个路口 4、重复第一步,直到找着出口