课程设计报告
(2014--2015年度第二学期)
名称:控制装置与仪表A
(DCS部分)课程设计题目:过热汽温控制系统组态院系:自动化系
班级:测控1201 1202
学号:201202030129
201202030201
学生姓名:张琨阿云嘎
指导教师:翟永杰
设计周数:一周
成绩:
日期:2015年7月14日
《控制装置与仪表A(DCS部分)课程设计》
课程设计
任务书
一、目的与要求
1.了解DCS应用过程中的主要工作内容及应该注意的问题,并能根据应用目的,进行分散控制系统的设计组态、调试操作等工作。
2.以LN2000分散控制系统为平台,完成过热汽温控制系统的组态。
3.进行DCS的调试工作。
二、主要内容
分为组态设计和系统调试两个部分:
1.组态设计
1.1系统配置组态
主要是指DCS中工程师站、操作员站、控制站的主机系统配置信息及外设类型,I/O -卡件信息,电源布置,控制柜内安装接线等。
此部分内容作为了解内容,不进行具体组态。
1.2实时数据库组态
数据库组态是系统组态中应尽早完成的工作,因为只有有了数据库,其他的组态工作(控制回路组态、画面组态等)才可以调试。数据库组态一般通过专用软件进行,数据录
入时一定要认真仔细,数据库中一个小的错误就会给运行带来极大的麻烦,如造成显示错
误、操作不当甚至死机故障。
1.3控制算法组态
控制算法组态指的是将系统设计时规定的模拟量控制、开关量控制等功能用DCS算法予以实现。
本设计以主汽温度串级控制策略为对象,并且模拟控制对象,构成闭环回路,完成这些控制算法的组态工作。
1.4操作员站显示画面组态
运行人员主要通过操作员站画面来观察生产过程运行情况,并通过画面提供的软操作器来干预生产过程,因此画面设计是否合理、操作是否方便都会对运行产生重要影响。
本设计要求设计关于主汽温控制的简单流程图画面、趋势画面、参数显示画面、操作画面,并把有关的动态点同控制算法连接起来。
1.5报警显示
在数据库中进行温度报警值设置,在运行界面中显示报警窗口。
本设计要求能够模拟实现超温报警。
1.6趋势组态。
显示需要观察的数据点趋势图。
2.系统调试
设计要求进行动态调试。
实际工作中的动态调试是指系统与生产现场相连时的调试。由于生产过程已经处于运行或试运行阶段,此时应以观察为主,当涉及到必需的系统修改时,应做好充分的准备及安全措施,以免影响正常生产,更不允许造成系统或设备故障。
动态调试一般包括以下内容:
1)观察过程参数显示是否正常、执行机构操作是否正常;
2)检查控制系统逻辑是否正确,并在适当时候投入自动运行;
3)对控制回路进行在线整定;
4)当系统存在较大问题时,如需进行控制结构修改、增加测点等,应尽量在停机状态下重新组态下装。若条件不允许,也可进行在线组态,但要熟悉在线组态的各个环节并做好应急措施。
三、进度计划
序号设计(实验)内容完成时间备注
1 了解设计内容,阅读并理解课程设计指导书的要求。D1
2 熟悉LN2000分散控制系统软件的组态方法。D1
3 进行组态设计要求的6项内容。D1~D2
4 进行系统调试D2
5 撰写课程设计报告D3
6 上机答辩考核D3
四、设计(实验)成果要求
1.完成系统结构图及数据点清单,打印各步的组态设计图纸。
2.对系统设计过程进行总结,完成并打印设计报告。
五、考核方式
1.设计报告内容及格式考查。
2.按上述步骤逐项完成软件内容的设计,进行操作演示,并进行答辩。
《分散控制系统与现场总线技术》课程设计
报 告 书
一、分散控制系统课程设计的目的与要求
1、设计内容概要:以LN2000分散控制系统为平台,完成过热汽温控制系统的组态并进行DCS 的调试工作
2、串级过热汽温控制系统的组成及特点
3、串级汽温控制系统设计
二、课程设计正文
1.串级汽温控制系统的工作原理
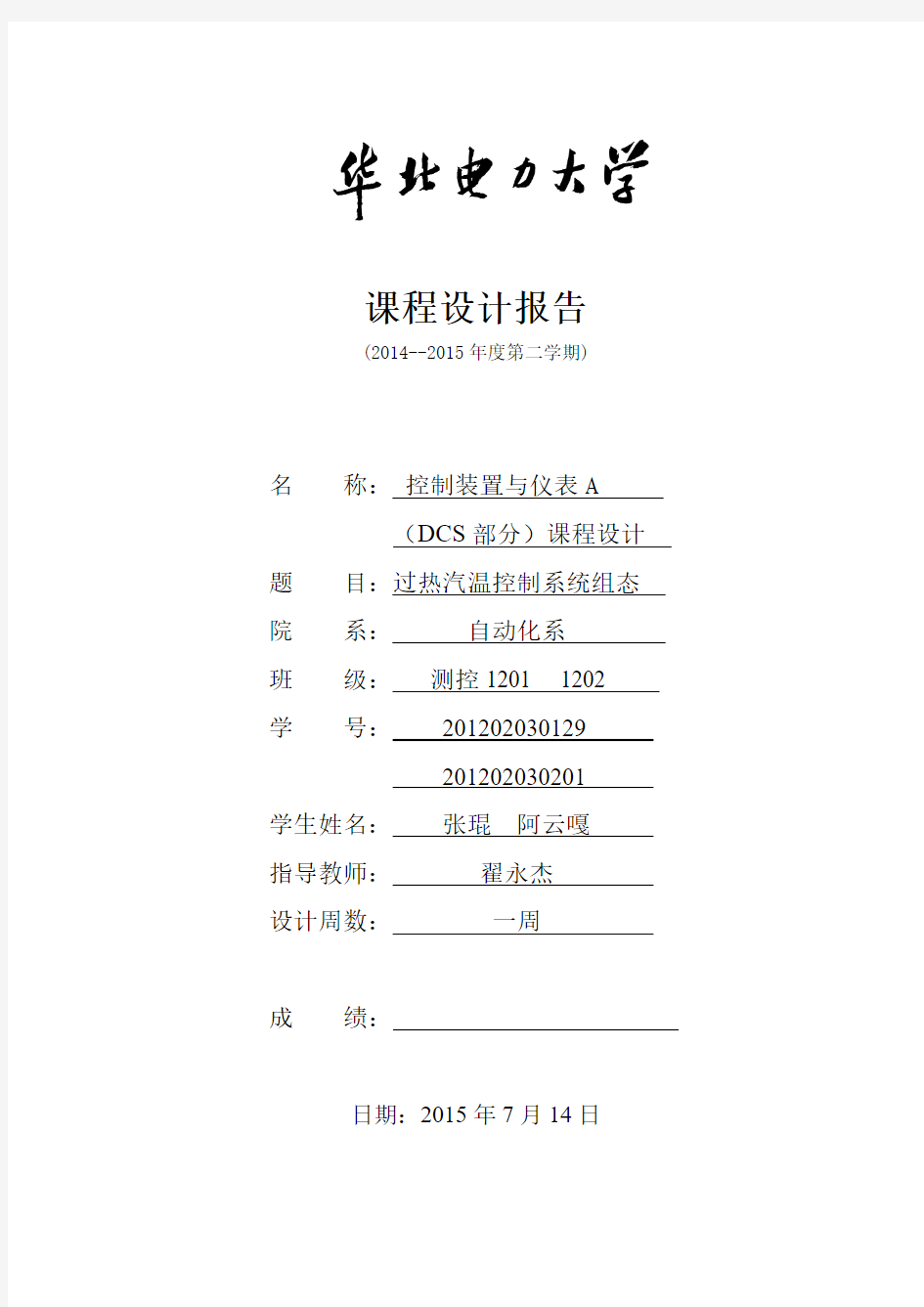
图1所示的串级汽温控制系统,只要导前汽温2θ发生变化,副调节器P 就去改变减温水流量θW ,初步维持后级过热器入口汽温2θ在一定范围内,起粗调作用。而过热器出口汽温1θ的控制,则是通过主调节器PI 来校正副调节器工作,只要1θ未达到给定值,主调节PI 的输出信号就不断递变化,使副调节器不断去控制减温水喷水量θW 的变化,直到1θ恢复到给定值为止。稳态时,导前汽温2θ可能稳定在与原来数值不同的数值上,而主汽温1θ则一定等于给定值。
P
Z
PI
+
+
θ
2
θ
1
W θ
图1 串级汽温控制系统工作原理
在串级汽温控制系统中,由于两个回路的任务及动态特性不同,可以选用不同的调节器。副回路及副调节器的任务是快速消除内扰,要求控制过程的持续时间较短,但不要求无差,故一般可选用纯比例调节器。当导前汽温惯性较大时,也可选用比例微分调节器。主回路及主调节器的任务是维持1θ恒定,一般选用比例积分调节器。当过热器惰性区较大时,也可选用比例、积分、微分调节器。 2. 串级汽温控制系统设计
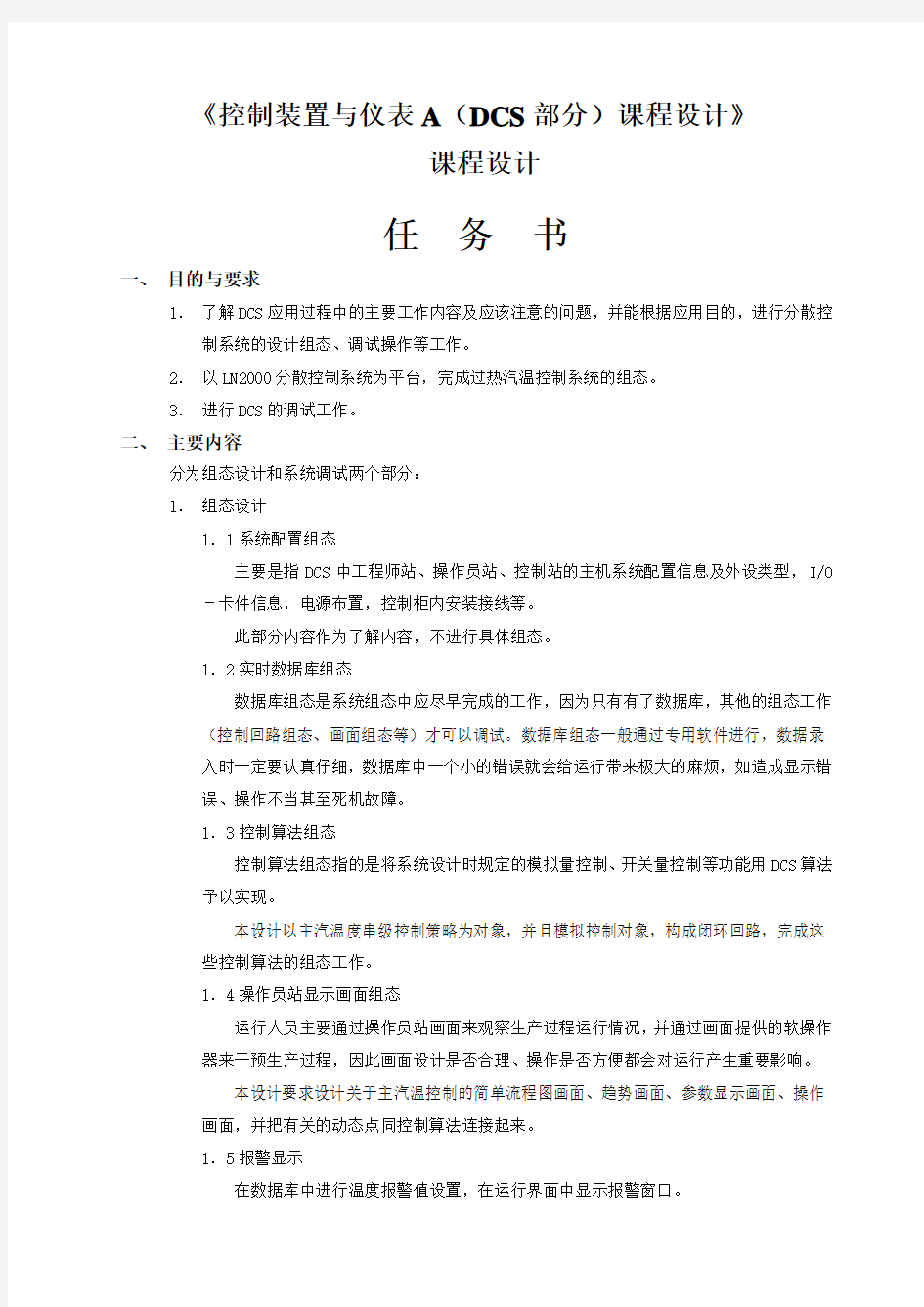
锅炉过热汽温控制采用串级汽温控制系统,控制系统方框图如图2: 已知系统中被控对象的传递函数为:
被控对象导前区:222
0.8
()(115)
W s W s θθ?=-
=-?+(℃/%) 被控对象惰性区:3
211)
201(125
.1)(s s W +=??=
θθ(℃/℃)
图2串级汽温控制系统构成
3.设计过程
3.1采用如下设计方案
为了更加形象地显示串级系统的控制作用,可以假设一个简单的对象模型,如图中红色框内所示,使用SAMA 模块搭建,仅用来示意,实际中对应具体的被控对象,在控制逻辑组态图中没有这部分内容。红色框内产生PV1主汽温度、PV2导前汽温,接受从控制器来的OP 阀门开度信号。
该控制对象的建立参考某电厂锅炉参数,使用某设计值下的参数作为系统的静态点,在该静态点情况下,工况不再发生变化,无外界干扰,仅由减温水来调节蒸汽温度。 3.2系统的静态平衡状态描述
(1)上一级过热器出口温度:71号模块设定为定值520度,该温度测点在喷水减温器之前。
(2)末级过热器出口温度:SP设定值为540度,为末级过热器出口温度。
系统在稳态下,喷水减温器之前温度值为520度(模块71),减温水阀开度为50%,经减温器(传递函数w2,模块69)引起40度的温降,形成末级过热器进口温度480度(模块70的输出);实际末级过热器进口温度经惰性区(传递函数w1,模块70),得到最终的末级过热器温度(模块72输出)。
3.3系统性能测试
以上描述为某严格静态点的平衡状态,仅为示意,省略和简化了很多因素,更合理的模型建立方式是采用机理建模方法,构成整个电厂热力系统模型。在该简化模型基础上,可以进行以下实验内容:
(1)主汽温度设定值的变化:将设定值SP(模块68的SP输出)进行改变,例如545或535度,观察自动调节系统的状态和工作变化。
(2)上一级过热器出口温度的变化:改变模块71的输出,表示上一级过热器出口温度发生了变化,实现扰动,观察自动调节系统的克服扰动的能力。
三、总结与结论
1、DCS的组态步骤及内容
1)数据库组态图
2)控制逻辑组态图(SAMA图)
3)流程界面组态图
4)操作窗口组态图
5)趋势图
手动操作
手动投自动
自动切手动
定值扰动
外部扰动
6)报警实现及报警死区的作用
所谓报警管理就是按照一定的规律去处理报警信息,其根本目的是使运行人员能够及时发现问题、快速正确地处理问题并可靠记录处理的全过程。
当信号值超过了报警上限值时,就会进入上限报警状态,如果超过了报警上上限,就进入了严重报警状态,这个时候,系统必须通知操作员采取措施,防止事故的发生。越下限报警类似。为了避免该数据点的值在报警值附近波动的时候,系统报警频繁发生,通常会加入一个报警死区。在软件上,当一个点进入上限报警状态时,报警产生,当这个数据点的数值返回到报警上限值时,并不立刻消除报警状态,而是直到它回到高限和低限之内时,才取消报警。报警死区的作用就是用来防止报警频繁发生。
7)操作员监控界面
8)单回路数据库组态图
9)单回路SAMA图
单回路有追踪
单回路无追踪10)单回路实施趋势
单回路有无追踪趋势图
2、设计分析
2.1串级控制系统中无扰切换的实现。
手动投自动时无扰动的实现:调节系统手动时,副调节器输出自动跟踪 M/A 站手动输出,主调节器输出自动跟踪导前气温温度信号。将M/A 站的输出反馈到副调节器PID2的跟踪端,因串级系统副调节器PID2在不断工作,只有使其输出为零,才能实现无扰,因此还需使副调节器PID2的PV 反馈到主调节器PID1的TR 端。这样,手动时,副调节器PID2模块因跟踪PV2,其输出增量为零,使得PID2的输出值等于M/A 站的输出值,从而使切换瞬间无扰动。
自动切手动无扰动的实现:自动切向手动的瞬间输出值等于切换前的自动输出值,故切换瞬间不产生扰动。在这之后,调节器的输出是在原来的基础上加增量,也不会发生突变,因此达到了无扰动切换的目的。
2.2主副调节器正反作用的确定。
()()()()()???
? ?
?--+
+=∑=k
i d
i p k e k e T T i e T T k e k k u 0
1)( ()()()()()()()()()()()???? ??-+--++--=--=?21211k e k e k e T T k e T T
k e k e k k u k u k u d i p
(1)判断副调节器PID2作用
当导前汽温温度升高时,需要调节阀门开度增大,即增大M/A 模块的Y 值,故副PID 调节器的输出AO 值应增大,又因为导前汽温温度的升高会使副PID 调节器的PV 值增大,故副调节器应为正作用。
(2)判断主调节器PID1作用
导前汽温温度的升高会导致主气温温度的升高,从而使主调节器的PV 值升高,此时应调节阀门
开度增大,即增大M/A模块的Y值,而副PID调节器的输出AO值和PV值都会增大,故SP应减小,故主调节器应为负作用。
2.3 PID参数整定的步骤及方法。
根据经验值预设置PID参数,再进行调试调整。先令SP为540摄氏度,阀门开度为50%,手动调节至平衡,即使主汽温值为540摄氏度为止,然后调自动,将SP改为550摄氏度,观察主气温值的变化,看是否可变为550摄氏度,若不能,则调节两个PID调节器的参数,直至在550摄氏度时稳定为止,之后再改变一下SP值,若主气温值能随其改变,则说明参数已调好。
方法:提出一种稳定域约束的串级PID控制器的参数优化方法,首先要得到串级PID控制器参数的稳定域约束条件然后利用遗传寻优算法获得ITAE性能指标最优的串级PID控制器参数。而我在实验中用的是拼凑法和经验法,通过观察趋势曲线来调节两个PID的参数,通过反复改动使得参数合适。
2.4 设定值扰动及内外干扰情况下系统的响应及分析。
当外部扰动使得主汽温输出值增大时,使得PID调节器变化,主调节器反作用,副调节器正作用,使得阀门开度增大,从而调节主汽温输出值降低,达到设定值。反之,当外部扰动使得主汽温输出值减小时,调节器作用,使得阀门开度减小,从而调节主汽温输出值升高,达到设定值。
当设定值扰动使得设定值增大或者减小时,主副调节器作用,使得阀门开度减小或。者增大,主汽温输出值增大或者减小,最终主汽温输出值等于设定值。
2.5单回路控制与串级控制的对比分析
选用串级控制的时候,当出现定值扰动及外部扰动时,主汽温仍能快速的跟踪。当去掉一个PID 模块,即去掉副调节器构成单回路控制系统时,需要把PID模块的动作方向改为正作用。和单回路控制系统相比,串级控制系统改善了被控过程的动态特性,具有较强的抗扰动能力和一定的自适应能力,能够准确及时地对系统的给定值扰动和外扰进行校正。
3.对本课程设计的体会、意见和建议
经过3天的DCS部分的课程设计,我成功的完成了完成过热汽温控制系统的组态并进行DC
的调试工作,同时对电厂的 DCS的有了一个初步的认识。在这个课程设计中,我不仅更加熟练了地掌握了课程上机实验时的数据库组态、SAMA图组态、图形界面组态、趋势组态的方法,而且实现了报警,学习了PID参数整定的步骤及方法,了解了主副调节器正反作用的确定,并且知道了串级控制系统中无扰切换的实现原理。
同样也遇到了很多问题。在程序界面组态的时候,对于选折线、直线还是多边形,搞不清楚,还有大概是软件应用不熟练,画导致重复画了很多次。对于PID参数,因为有经验值,所以确定参数比较顺利。第三天上机,调试了很多次截了很多图,但是由于截图的时间不合适,趋势图的上下限选择也不合理,导致图片观察起来不明显而且也无法说明问题得出结论,因此第二天又重新调试重新截图。这是我意识到以后再进行试验应该先知道自己要得到什么结论,要通过实验说明什么问题而不是盲目的操作,那样会浪费很多时间做了无用功。总之,本次课设收获很多。
四、参考文献
[1]金以慧过程控制清华大学出版社(第一版) 1993年4月
[2]王常力、罗安分布式控制系统(DCS)设计与应用实例电子工业出版社 2000年8月
[3]翟永杰、王学厚、张悦、石金宝、韩璞火电厂分散控制系统原理及应用
中国电力出版社 2010年9月