工业机器人机械结构模块化设计
发表时间:2019-08-05T15:48:34.500Z 来源:《基层建设》2019年第15期作者:林积新
[导读] 摘要:本文在对市场上常见的各种工业机器人进行功能分析前提下,根据其结构不同进行模块化划分,将工业机器人按通用模块的不同划分为六种模块,分别是终端执行器、绕z轴旋转臂、绕x(y)轴俯摆臂、沿X轴平移、平移转动、升降底座、AGV移动平台六种模块。
身份证号码:44098219890928XXXX
摘要:本文在对市场上常见的各种工业机器人进行功能分析前提下,根据其结构不同进行模块化划分,将工业机器人按通用模块的不同划分为六种模块,分别是终端执行器、绕z轴旋转臂、绕x(y)轴俯摆臂、沿X轴平移、平移转动、升降底座、AGV移动平台六种模块。当客户提出不同的机器人设计需求时,仅需按照其实际工况和技术要求来对接合适的模块种类,然后按照相关的技术标准完成模块装配,可以迅速完成客户所需的工业机器人设计。本文结合实际应用例子,论述了工业机器人模块化设计在提升设计效率的作用,为以后的工业机器人在生产应用中提供了一定的借鉴和参考价值。
关键词:工业机器人;模块化设计;效率
引言
随着中国的“中国制造2025”目标的提出,很多研发企业都围绕工业机器人的实际应用需求,在开发新的复合市场需要的工业机器人产品加大投入。随着设计技术的进步,设计机器人时标准化、模块化也是必不可少的内容,为机器人快速响应多样化需求打下基础。同时,也有利于进一步扩大机器人的实际应用市场。根据现今工业机器人的发展推测,将来的30年工业机器人技术都将是一个高速增长时期,任何一个企业只要能够设计制造出符合当今社会迅速变化的工业机器人,将占领大量的未来市场,赢得丰厚的市场回报。但是就目前而言,工业机器人的设计周期长、投资成本太高,其对应的应用范围局限性较大,以上这些限制因素都使的它们难以适应当今速变化的市场需求。所以工业机器人模块化设计在未来提供设计效率上尤为重要。
一工业机器人模块化划分
(一)模块划分的方法和理论
本文在讲过长期的市场调查以及工业机器人的功能分析过程中,通过大数据分析以及总结,将机器人产品详细的划分成了具有特定作用的但又相对通用的功能模块,同时也根据相关的标准确定了其对应的定义模块接口和要求。因此模块化划分工业机器人,需要考虑到以下三点因素:第一,模块划分的基本原则就是用最少的模块组合最多的产品;第二,所划分的模块其结构和功能都是独立以及完整的;第三,为了使同功能的模块可以互换以及不同的模块可以组合,所以所划分的模块其组合性以及互换性都要较高。
(二)模块划分及其功能
本文这次就以关节型机器人为例,进行相关的论述和分析,关节型机器人其主要的工作原理就是连杆利用关节交替连接而成。通过大数据对其的总结分析,可以将其分成六个模块,所划分的各模块以及其对应的解析如下图1所示。通过图一中的解析,可以确定其和机器人连杆平行的轴是z轴,而对应的垂直于机器人连杆的轴则是z、y轴。
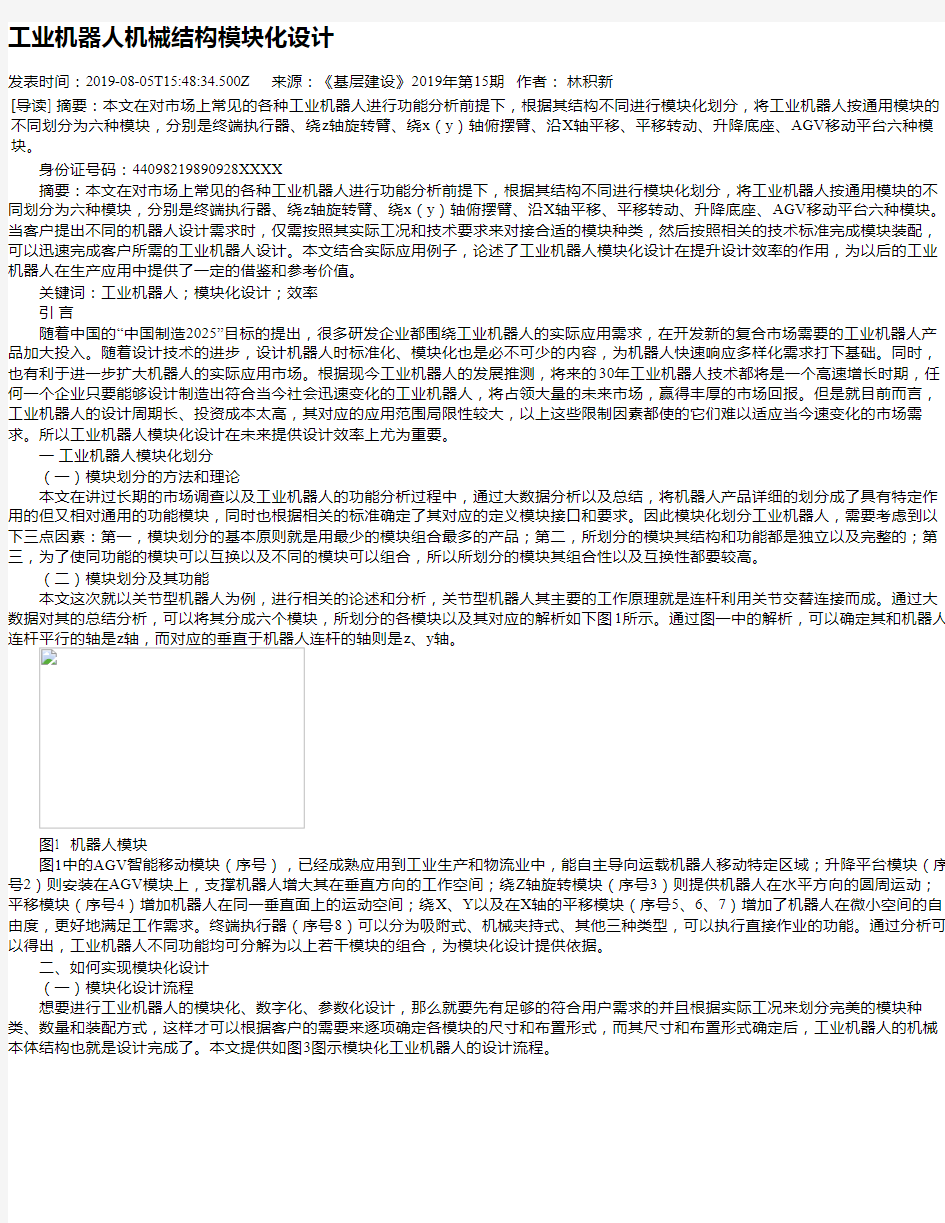
图1 机器人模块
图1中的AGV智能移动模块(序号),已经成熟应用到工业生产和物流业中,能自主导向运载机器人移动特定区域;升降平台模块(序号2)则安装在AGV模块上,支撑机器人增大其在垂直方向的工作空间;绕Z轴旋转模块(序号3)则提供机器人在水平方向的圆周运动;平移模块(序号4)增加机器人在同一垂直面上的运动空间;绕X、Y以及在X轴的平移模块(序号5、6、7)增加了机器人在微小空间的自由度,更好地满足工作需求。终端执行器(序号8)可以分为吸附式、机械夹持式、其他三种类型,可以执行直接作业的功能。通过分析可以得出,工业机器人不同功能均可分解为以上若干模块的组合,为模块化设计提供依据。
二、如何实现模块化设计
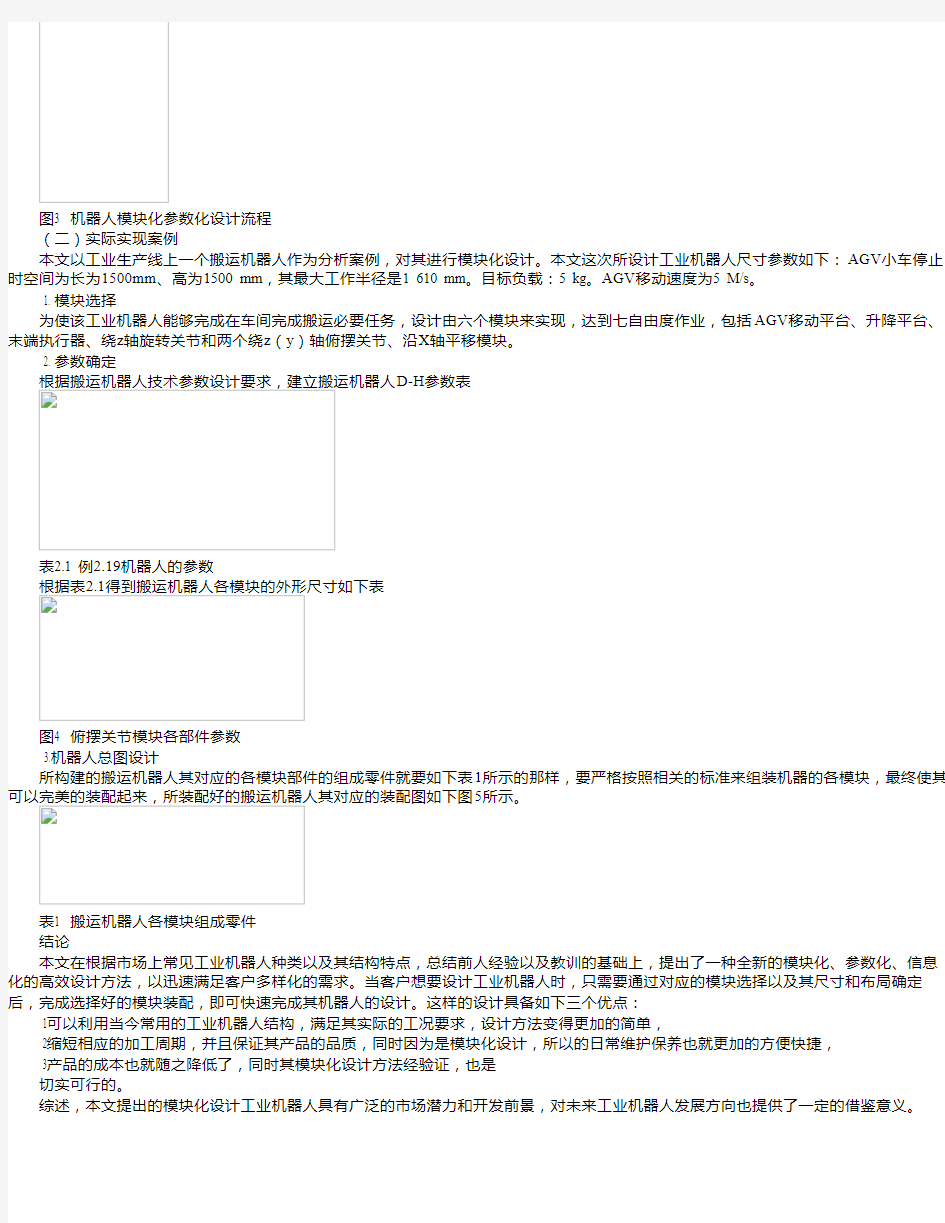
(一)模块化设计流程
想要进行工业机器人的模块化、数字化、参数化设计,那么就要先有足够的符合用户需求的并且根据实际工况来划分完美的模块种类、数量和装配方式,这样才可以根据客户的需要来逐项确定各模块的尺寸和布置形式,而其尺寸和布置形式确定后,工业机器人的机械本体结构也就是设计完成了。本文提供如图3图示模块化工业机器人的设计流程。