一、(10分,每小题1分)
1、任一线性连续定常系统的系统矩阵均可对角形化。(×)
2、对SISO 线性连续定常系统,传递函数存在零极点对消,则系统一定不能观且不能控制。(×)
3、对线性连续定常系统,非奇异变换后的系统特征值不变。(√)
4、对于线性连续定常系统的最小实现是唯一的。(×)
5、稳定性问题是相对于某个平衡状态而言的。(√)
6、Lyapunov 第二法只给出了判定稳定性的充分条件。(√)
7、对于SISO 线性连续定常系统,状态反馈后形成的闭环系统零点与原系统一样。(√)
8、对于一个系统,只能选取一组状态变量。(×)
9、对于一个n 维的线性定常连续系统,若其完全能观,则利用状态观测器实现的状态反馈闭环系统是2n 维的。(√)
10、对线性定常系统,其Lyapunov 意义下的渐近稳定性和矩阵特征值都具有负实部是一致的。(√)
二(10分,每小题5分)
(1)简述平衡状态及平衡点的定义。
(2)简述状态方程解的意义。
解:(1)状态空间中状态变量的导数向量为零向量的点。由平衡状态在状态空间中所确定的点称之为平衡点。
(2)线性连续定常系统状态方程的解由两部分组成,一部分是由初始状态所引起的自由运动即零输入响应,第二部分是由输入所引起的系统强迫运动,与输入有关称为零状态响应。
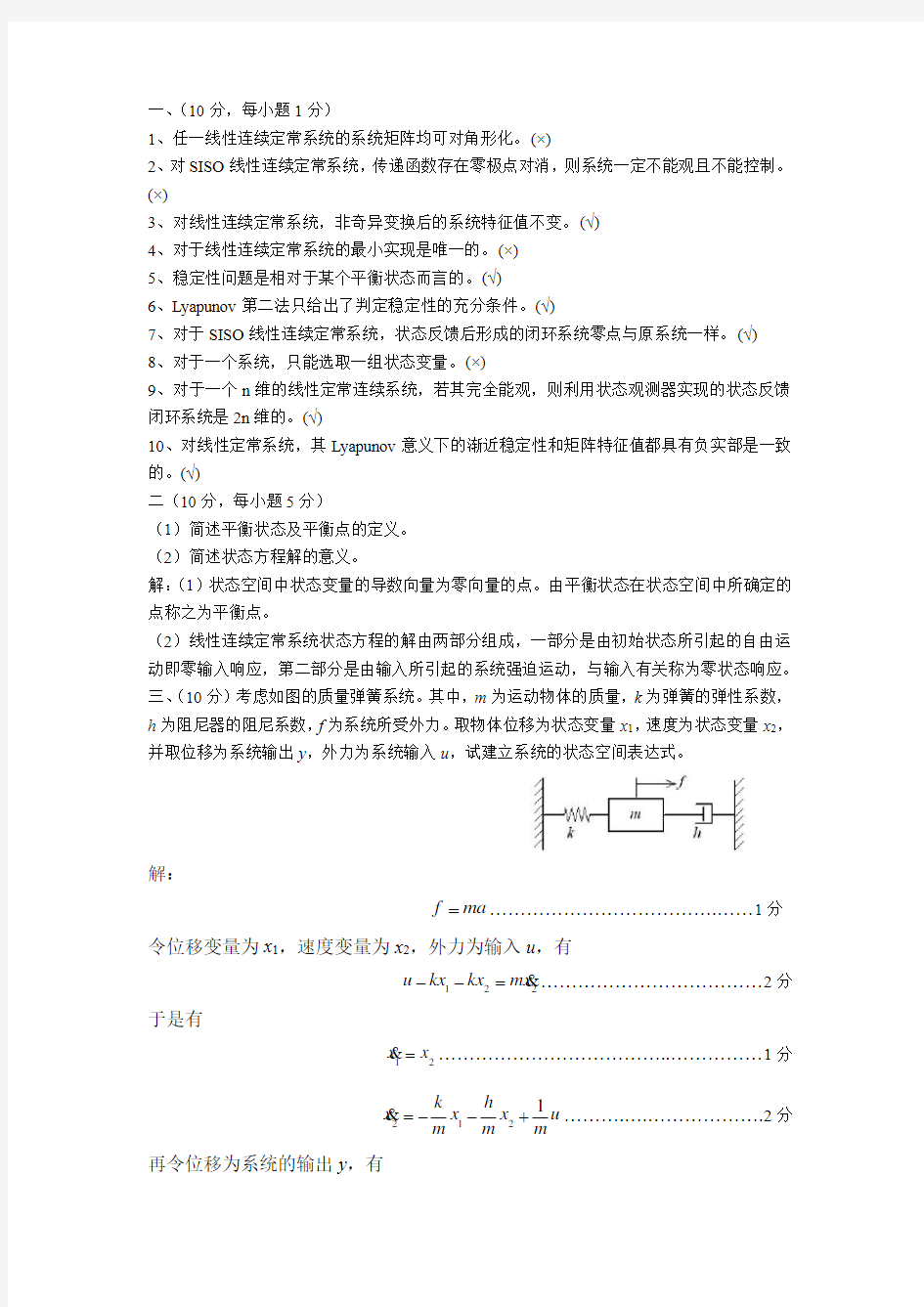
三、(10分)考虑如图的质量弹簧系统。其中,m 为运动物体的质量,k 为弹簧的弹性系数,h 为阻尼器的阻尼系数,f 为系统所受外力。取物体位移为状态变量x 1,速度为状态变量x 2,并取位移为系统输出y ,外力为系统输入u ,试建立系统的状态空间表达式。
解:
f ma =……………………………….……1分
令位移变量为x 1,速度变量为x 2,外力为输入u ,有
122u kx kx mx --=&………………………………2分
于是有
12x x =&………………………………..……………1分
2121k h x x x u m m m
=-
-+&……….….……………….2分 再令位移为系统的输出y ,有
1y x =…………………………….……….1分
写成状态空间表达式,即矩阵形式,有
11220101x x u k h x x m m m ????????????=+????????--????????
&&………..……………..2分 []1210x y x ??=????
……………………..……….……….2分 四、(15分)求以下系统的状态响应
0120()()(),(0),()e 2301t x t x t u t x u t -??????=+==??????--??????
& 解: 由012,230A b ????==????--????
得 123s sI A s -??-=??+??
…………….……………………………………2分 121111212()22
2121
21s s s s sI A s s s s -??--??++++-=????--??++++??……………….………2分 22222e e e e e 2e e e 2e t t
t t At t t t t --------??--=??-+-+??
…………….………….………2分 ()0
()e (0)e ()()t At A t s x t x B s u s ds -=+?…………….………………2分 21(41)e e
t t x t --=-+…………….………………...…………1分 22(34)e 2e t t x t --=--…………….…………..………………1分
五、(10分)令2I 为二阶单位矩阵。求解Lyapunov 方程20T A P PA I ++=判断以下系统的
稳定性
0111x x ??=??--??
& 解 令a b P b c ??=?
???
………….…………..…………………..……………1分 得
21002201b a b c a b c b c ---????+=????---????
……………….………………2分 21002210b a b c b c -+=??--=??-+=?
……………….……………………………..………2分 3212121P ??=????
……………….…………………………..…………2分 由 320,540a P =>=>……………….…………..………………2分 可知P 正定,所以系统渐近稳定………….……………..………………1分 六、设1∑和2∑是两个能控且能观的系统
[]1
121210431022221111==-=∑=??
????=??????--=∑C b A C b A ,,:,,: (1)试分析由1∑和2∑所组成的串联系统的能控性和能观性,并写出其传递函数; 解:(1)1∑和2∑串联
当1∑的输出1y 是2∑的输入2u 时,331222x x x x =-++&
010*********x x u ????
????=--+????????-????
&,[]001y x = 20141413014M b Ab A b -??????==-??????-??
则rank M=2<3,所以系统不完全能控。
12
71)4)(3)(2(2)()(21++=++++=-=-s s s s s s B A sI C s W 当2∑得输出2y 是1∑的输入1u 时
11034
100021x x u ????????=--+????????-????
&,[]210y x =
因为 2001016124M b Ab A b ??????==-??????--??
rank M=3 则系统能控
因为2210321654c N cA cA ????????==--????????????
rank N=2<3 则系统不能观
12
71)()(21++=-=-s s B A sI C s W 七、(15分)已知系统 u x x ??
????+??????=110011& 试将其化为能控标准型。(10分) 解 1210c u ??=????,1112201c u -??=??-??
(2分) [][][]1111221122010101c p u -??
===-??-?? (2分) [][]111
12122221100p p A ??==-=????
(2分) 11221112211,11P P --????==????-????
(2分) 能控标准型为u x x
??
????+??????=101010& (2分) 八、(10分)已知系统[]01000010,10061161x x u y x ????????=+=????????---????
&,求形如 ()z
A GC z Bu Gy =-++&的全维状态观测器,
且极点为12,35,2s s j =-=-±其中,,A B C 分别为原系统得系统、控制和输出矩阵。 解: 令
123g G g g ????=??????
..…………………………………..…………..…………1分 则
32112123 ()
(6)(611)(1166)sI A GC s g s g g s g g g -+=+++++++++……2分
计算知理想特征多项式为 12332 ()()()
93680
s s s s s s s s s ---=+++…………………………………..…………2分
列方程得 1121
236961136
116680g g g g g g +=??++=??+++=?………………………………..…………2分 解方程得
371G ????=????-??
..………………………………………...…………..………2分 从而状态观测器为
3100370107511611z z u y -????????????=-++????????????----??????
&………..………..…………1分