第3章 已知信号的检测
在第二章中,介绍了统计假设检验理论,这一章中,我们将把这一理论用于最简单的信号检测问题中。即:已知信号的检测问题中。
所谓已知信号,是指:如果这个信号出现了,那么它的幅度、频率、相位等各个参数都是已知数。这时,设计最佳接收机,就是在噪声中检测信号是否存在或从几个可能发送的信号中签别出被发送的究竟是哪个信号。在上一章中已经指出,这种情形相当于假设检验理论中的简单假设检验情况。虽然这是理想情况。但却正好用作为检测理论的应用入门。而且,相当多的实际系统也确实接近这种理想情况,此外,理想系统的性能还可作为非理想系统的比较标准。
把假设检验理论应用于具体的通信系统中,观测量r
相应于对接收到的混合波形的取样,而接收机则表示了对r
的加工,即判决规则。
在这一章中,将仅限于讨论双择假设检验。所用的分析方法和有关结论,不难推广到M 择假设检验中。
§3.1 白高斯噪声中已知信号的检测
首先,讨论最简单的情况,假定噪声是平稳白高斯噪声。考虑一个雷达信号检测系统。在时间间隔),0(T 内,相应于两种假设下接收端输入的混合波形是
T
t T t t n t s t r H t n t r H ≤≤≤≤??
?+==00)
()()(:)
()(:10 3.1-1
其中,)(t s 是已知信号;)(t n 是相加平稳白高斯过程,具有零均值、功率谱密度
2
0N 。
我们的目的是要设计一个接收机,来对)(t r 做计算处理(也称为加工),在此基础上,在0H 和1H 两个假设中选择其中之一个,即判断出有信号存在或无信号存在。
已经指出,在第二章中所讨论的几种不同的判决规则,都可以看成是Bayes 准则的特殊情况,各准则下的最佳判决规则都是似然比判决规则,它包括:(1)计算出似然比。(2)将此似然比与判决门限进行比较,并做出判决。不同准则下的判决规则之间的差别仅在于判决门限值η的不同,因此,在这里我们暂时用不着指定具体的判决准则,而只讨论似然比系统。
§3.1-1 似然比检测系统
我们可回忆起,在上一章的讨论中,观测量r
是有限个离散随机变量的序列,用矢量表示为
T
21],,,[n r r r r =
为了把上一章讨论的结果,应用于对连续波形)(t r 的检测,我们需要把)(t r 表示为有限个离散随机量总合。
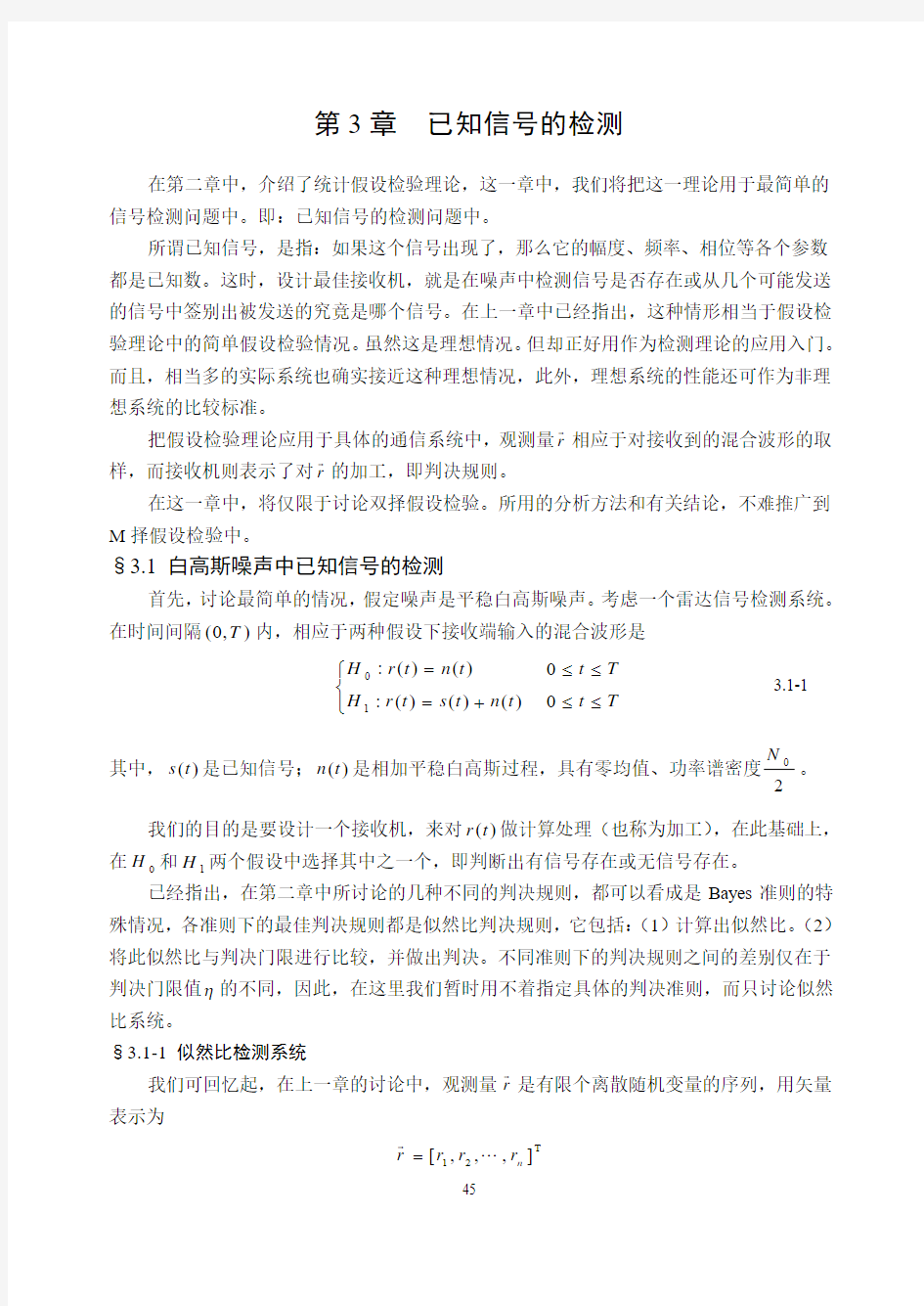
首先讨论噪声)(t n 。现在,暂时假设噪声)(t n 具有有限带宽)2
1,
21(W W -,噪声的
功率谱密度为
W
W
N N 2
12102
1)(0
>
≤??
???=ωωω (3.1-2a )
噪声的自相关函数为
τ
τ
π
τW W W N R 212
1sin 4)(0= (3.1-2b )
)(ωN 和)(τR 示于图3.1-1中。图中,)(τR 在
),2,1(2
1
±±==k k W πτ处为零。
W 2
W 2
-
τ
图3.1-1 具有有限带宽的白噪声的功率谱密度和自相关函数图
对于一个平稳随机过程,若它具有有限带宽且它的功率谱密度在此带宽范围内为恒值,那么,可应用取样定理,将它展开成
∑
∑
=-
=∞
→--≈
-
-'=TW
k k
N
N
k k
N k Wt k Wt n W
k t W W k t W n m
i l t n 1
2
12
1)
()(sin )
()(sin ..)(πππ (3.1-3)
在上式中,k n 表示在时刻k t 时,对)(t n 的取样值,W 表示噪声带宽,N 样本总数。
π
?2WT t
T N ==
。用同样方法,我们可以得到以下近似式
∑
=--≈
N
k k
k Wt k Wt r t r 1)()(sin )(π (3.1-4)
∑
=--≈
N
k k
k Wt k Wt s t s 1
)
()(sin )(π (3.1-5)
k r 、k s 分别表示在k t t =时,对)(t r 和)(t s 的取样值。与(3.1-3)、(3.1-4)、(3.1-5)对应的逆关系式是
t k Wt k Wt t r W
r k d )()(sin )(--=?
∞
∞
-π (3.1-6)
t k Wt k Wt t s W
s k d )()(sin )(--=?
∞
∞
-π (3.1-7)
t k Wt k Wt t n W
n k d )
()(sin )(--=?
∞
∞
-π (3.1-8)
根据式(3.1-3)、(3.1-4)、(3.1-5)我们便可用样本值k r 、k s 和k n 把连续波形)(t r 、
)(t s 和)(t n 等效地表示成离散形式。并且有
),2,1()0)((),2,1()0)((N k r p T t t r p N k n p T t t n p k
k ==≤≤==≤≤
下面,我们来求似然比。从式(3.1-2b )可看到,当时),2,1(2
1 ±±==K k W πτ,
0)(=τR 。因此,若选择取样时间间隔使它满足W
t π?2=时,则)(t n 的各个样本
),,2,1(N k n k =互不相关。又从式(3.1-8)可看到,k n 是)(t n 的线性函数,因此k n 是
高斯随机变量。对于高斯变量,互不相关即独立,因此各样本k n 互相独立。
为了求得似然比,先求似然函数)(H r p 和
)(H r p
。因为n 是高斯随机变量,为
了求得它的概率密度函数,只要求出它的平均值和方差就够了。
前面已假定,)(t n 的均值为0。从式(3.1-8)不难得出
0][==k k n n E
用2n σ表示k n 的方差,不难得到
π
σ4)0(0
2
W N R n ==
于是,可得到)(0H r p
为
???
? ?
?-???
? ?
?===
∑
∏
==N
k n
k N
n
k
k N k k r
n r r p H r p 1
222
21
02e x p 21)
()(σ
πσ
(3.1-9)
在假设1H 之下,有
k k k n s r +=
因此,k r 也是独立高斯变量。k r 的平均值为
k k k s r r E ==][
k r 的方差为
22
2
][])[(n
k k k n E r r E σ
==-
于是,可得到)(1H r p
为
???
? ??-???
? ?
?=+==
∑∏
==N k n
k k N
n
N
k k
k k k k s r n s r r p H r p 1
22
2
21
12)(exp 21)
()(σπσ
(3.1-10)
似然比为
???
? ?
?-
????
?
?--
==∑
∑
==N
k n
k N
k n
k k r
s r H r p H r p r 1
221
22
012exp 2)(exp )
()(σ
σΛ
)(
并项之后有
[]
∑=-=N
k k k k
n
s s r
r 1
2
2
221
e x p )(σΛ
(3.1-11)
于是,似然比判决规则为
ηΛ0
1
)(H H r ≥
<
当≥)(r
Λ门限值η时,判决为有信号,反之,判决为无信号。
ηΛln )(ln 0
1
H H r ≥
<
(3.1-12)
很明显,上式与式(3.2-12)等效。
应用对数似然比,并将式(3.1-11)代入上式,可得到判决规则为
ησ
ln )2(210
1
1
22H H s s r
N
k k
k k
n
≥
=<-∑
(3.1-13)
为了得到连续波形)(t r 、)(t s 表示的判决规则,在T t N =?保持为常数的条件,使t ?趋于0,N (从而W )趋于无穷,在极限情况下,有
∑?=?N k T
k k n t t s t r N s r 1002d )()(2)2(21σ (3.1-14)
t t s N s T
N
k k n
d )(1210
2
1
2
2
?
∑
?
=σ
(3.1-15)
代入式(3.1-13),得到判决规则为
ηln 2
d )(2
1d )()(00
1
2
N H H t
t s t t s t r T
T
<≥-
?
?
(3.1-16)
T T
V H H t
t s t r 0
10
d )()(<≥?
(3.1-17)
?
+
=
T
T t t s N V 0
2
0d )(2
1ln 2
1η
(3.1-18)
由式(3.1-17)表示的判决规则与式(2.1-12)的判决规则等效。在(2.1-12)中对观测量(即输入数据)的全部加工在于计算似然比)(r
Λ;应用式(3.1-17)的判决规则时,对输入混合波形的全部加工,在于计算相关积分?T
t t s t r 0d )()(。在式(2.2-12)中,输入数据
的全部信息都包含于似然比之中,判决规则完全取决于似然,我们把它称为检验统计量(Test statistic )或简称统计量,记为G ,应用式(3.1-17)时,相关积分便构成了检验统计量G 。很明显,和)(r
Λ一样,G 也是一维随机变量。
T V 是新的判决门限。它取决于所给定的判决准则;同时还与信号能量E 和噪声功率
谱密度0N 有关。
式(3.1-17)给出了我们所要寻求的平稳白高斯噪声中检测已知信号(雷达信号检测系统)的最佳判决规则,它可用下图表示
门限比较
相关积分器
图3.1-2 雷达信号检测系统方框图
下面,我们考虑另一种检测系统—二元通信系统。这时,在),0(T 内,在两种假设下接收端输入的混合波形)(t r 是
)
()()(:)()()(:1100t n t s t r H t n t s t r H +=+= (3.1-19)
其中)(0t s 、)(1t s 都是已知信号。相加噪声)(t n 仍假定为零均值平衡白高斯噪声,具有功率谱密度
02
1N 。接收机的任务就是在对)(t r 进行加工的基础上,从噪声的干扰中鉴别出
被发送的信号是)(0t s 还是)(1t s 。
应用同样的方法,不难导出似然比判决规则的表示式,下面,我们给出最后的结果
T T
T
V H H t t s t r t t s t r ??
≤
<-0
1
00
1d )()(d )()(
(3.1-20)
其中门限值T V 等于
?--
=
T
T t t s t s n N V 0
2
1200d )])([2
1
12η
(3.1-21)
式(3.1-20)的判决规则可用下图实现
与门限进行比较
图3.1-3 二元信号检测系统方框图
式(3.1-17)和式(3.1-20)告诉我们,在上述两种情况下,和判决规则有关系的,都只是相关积分的计算。判决门限T V 与判决规则无关,它可根据已知条件预先计算得到。
下面我们进一步讨论,用什么样的滤波器来实现相关积分。回忆第一章关于匹配滤波器的讨论,我们知道,若一线性滤波器与信号)(t s 匹配,它的脉冲响应)(τm h 满足下式
)()(0ττ-=t s h m
(1.1-28)
0t 为观测时间。当匹配滤波器的输入端加入混合波形)(t r 时,在它的输出端得到)(t y
?
?∞
∞
--=
-=
00d )()(d )()()(τ
τττττt s t r h t r t y m (3.1-22)
如果信号存在,那么,它一定是落在观测时间),0(T 内,即
T t t t s ><=;00
)(
(3.1-23)
上式说明,式(3.1-22)的积分上限不可能大于0t ,于是有
?
--=
0d )()()(t t s t r t y τττ
(3.1-24)
对上式右端进行变量置换,令ττ'=-0t ,有
τττ'''+--=?d )()()(0
00t s t t r t y
(3.1-25)
若选择观测时刻,0T t =代入上式T t t ==0时,匹配滤波器输出为 ?
=
T
t t s t r T y 0
d )()()( (3.1-26)
将上式与式(3.1-17)不等式左边的相关积分比较,可见二者全同。这说明,相关积分可以通过在时刻T t =时对匹配滤波器的输出进行取样得到。这样,又可用下图来代替图3.1-2。
图3.1-4 用匹配滤波器实现相关积分
从以上讨论,我们可以得到结论,在平衡白高斯噪声中检测已知信号时,匹配滤波器构成了检测系统的中心环节。 3.1-2 接收工作特性
在第二章中已指出,在各种判决准则下,检测系统的特性都可以用接收机工作特性(ROC )来分析。下面我们以二元通信系统为例求ROC ,为此,首先需要得到αP 和βP 的表达式。
我们可将判决规则式(3.1-20)写成如下的等效形式
T T
T
T
V H H t t s t s t t s t r t t s t r '<-+
-≥
???
1
21
2
000
1d )]()([2
1
d )()(d )()(
(3.1-27)
式中ηln 2
10N V T =
',η取决于所选定的判决准则。现在把式(3.1-27)的左边部分作为
统计量G ,有
???
-+
-=
T
T
T
t t s t s t t s t r t t s t r G 0
2
1200
00
1d )]()([2
1
d )()(d )()(
(3.1-28)
于是,虚警概率和漏警概率为
?
∞
'
=
=T V G H G p H H P P d )()(001α
?
'
∞
-=
=T V G H G p H H p P d )()(110β
(3.1-29)
从式(3.1-28)可得到关于检验统计量G 的特点如下 1.G 是一维随机变量
2.在0H 和1H 两种假设下,G 都是高斯随机变量。这是因为,高斯随机过程)(t r 经过积分变换的结果是一个高斯随机变量。在假设0H 下,有
)()()(0t n t s t r +=
于是,在0H 下,统计量G 为
[][][]
???-+
+-+=
T T
T t t s t s t t s t n t s t t s t n t s G 02
120
000010d )()(2
1
d )()()(d )()()((3.1-30a )
类似地,可得到在假设1H 下的G 为
[][][]
???-++-+=
T
T
T
t t s t s
t t s t n t s t t s t n t s G 0
2
120
001011d )()(21
d )()()(d )()()((3.1-30b )
由于G 是高斯随机变量,为了求得条件概率密度)(0H G p 和)(1H G p ,只需求得G 的均值和方差即可。
用][0H G E 表示在假设0H 下G 的平均值
??
-+
++
+=T
T
t t s t s t t s t n t s t t s t n t s E H G E 02
1200
00100]
d )]()([2
1d )()]()([d )()]()([[)[
(3.1-31)
已经假定,)(t n 的均值为零。于是有 t t s t H G E d )]()(s [2
1][2
100--
=
(3.1-32)
用][0H G V 表示在0H 下G 的方差
]]][[[][2
00H G E G E H G V -=
将式(3.1-30a )(3.1-32)代入上式,经整理后,得到
τ
τττττττd d )]()([)]()()][()([]
d )]()()[()]()()[([][010
010
010
010t s s t s t s n t n E s s n dt t s t s t n E H G V T T
T
T
--=
--=??
?? (3.1-33)
由于)(t n 是白高斯噪声,具有功率谱密度021N ,于是有 )(2
1)]()([0τδτ-=
t N n t n E
(3.1-34)
代入式(3.1-33),并利用δ函数的积分性质,可得
[][][][][][]?
???
-=
--=---=
T
T
T T
t
t s t s N t t s t s t s t s N t s s t s t s t N H G V 0
20100
010********
0d )()(2
1d )()()()(21d d )()()()()(2
1τ
τττδ (3.1-35)
用同样方法可得到
[]?-=T
t t s t s H G E 0
2
011d )()(21
][
(3.1-36) []?
-=
T t t s t s N H G V 0
20101d )()(21][
(3.1-37)
上两式中,][1H G E 和][1H G V 分别表示在假设1H 下G 的平均值和方差。
比较(3.1-35)、(3.1-37)可以看到
][][10H G V H G V =
定义E 为信号)(0t s 和)(1t s 的平均能量
[]
)(2
1d )()(2
1
100
2
120
E E t t s t s
E T +=
+=
?
(3.1-38)
其中0E 和1E 分别表示信号)(0t s 和)(1t s 的能量。定义ρ为归一化时间相关系数
[]t t s t s
E
T
d )()(10
10
?=
ρ
(3.1-39)
因为下式恒成立
[]0d )()(2
10
≥±?t t s t s
T
(3.1-40)
故可以证明
1≤ρ (3.1-41)
比较式(3.1-39)、(3.1-38)和(3.1-32)、(3.1-36),可得 )1][0ρ--=(
E H G E (3.1-42) )1(][1ρ-=E H G E (3.1-43)
用相同方法可得到
)1(][][010ρ-==E N H G V H G V
(3.1-44)
求得了G 的平均值和方差以后,不难写出)(0H G p 和)(1H G p 的表示式
[]???
? ??-+-??????=)-()-(ρρρπ12)1(e x p 121
)(0221
00E N E G E N H G p (3.1-45)
[]???
? ??---??????=)-()-(ρρρπ12)1(e x p 121
)(0221
01E N E G E N H G p (3.1-46)
于是,可以得到αP 和βP 为
[]G E N E G E N G H G p P T T V V d )1(2)1(exp )1(21
d )(0221
00?
?
∞
'
∞
'
???
?
?
?--+-??????-=
=
ρρρπα (3.1-47) []G E N E G E N P T
V d )1(2)1(exp )1(21
0221
0?∞-???
?
?
?----??????-=ρρρπβ (3.1-48)
令[]
2
/10)1()
1(ρρ-
-+=
E N E G u ,代入式(3.1-47)进行变量置换,可得到
u e
P V
u
d 212
2
?
∞
-+
=
π
α (3.1-49)
式中
[]
2
/10)1()
1(ρρ-
-+'=
+
E N E V V
T (3.1-50)
用同样方法,可得
u e
P V
u
d 212
2
?
-
∞
--=
π
β (3.1-51) []2
/10)1()
1(ρρ---'=
-
E N E V V
T
(3.1-52)
分析式(3.1-49)—(3.1-52),可以得到一个重要结果:在相加平稳白高斯噪声中检测已知信号时,接收机的性能只取决于以下三个参量:
(1)平均信号能量E ; (2)噪声功率谱密度0N ; (3)信号之间的相关系数。 而与信号的波形无关
在通信系统中,常采用最小错误概率准则,这时有
1
010011100====C C C C
若设2
1)()(10==H P H P ,则根据式(2.2-21)有1=η,所以有0='T V ,代入式(3.1-50)、
(3.1-52)可以得到
2
/10
]
)1([
N E V
η-=+
(3.1-53)
2
/10
]
)1([
N E V
η--=-
(3.1-54)
将+V 和-V 代入式(3.1-49)、(3.1-51)得到
u e
P N E u
d 212
/10
2
]
)1([
2
?
∞--=
ηαπ
(3.1-55)
u e
P N E u
d 21
2
/10
2
]
)
1([
2
?
∞--=ηβπ
(3.1-56)
以及
u e
P N E u
e d 212
/10
2
]
)1([
2
?
∞--=
ηπ
(3.1-57)
式中βαP H P P H P P e )()(10+=表示错误概率。
从式(3.1-57)可以看出,e P 随着0
)
1(N E ρ-增大而减小,在
N E 为固定值之下,当
1-=ρ时,e P 可达到最小。当)()(01t s t s -=时,1-=ρ。这时,便得到最佳的或理想的二元通信系统。
在雷达系统中,常用的是Neyman-pearson 准则。在这种情况下,用下式作为检验统计量比较方便见式(3.1-17)。
?
=T
t t s t r G 0
d )()( (3.1-58)
在两种假设下的)(t r 为
)
()()(:)
()(:10
t n t s t r H t n r r H
+==
可以得到
0][0=H G E (3.1-59) E H G E =][1 (3.1-60)
而且有
E
N t t s N t s t s n t n E H G E G E H G V T
T
T
00
2
00
2
002
1d )(2
1d d )()()]()([}]][{[][=
=
=
-=???
τ
ττ (3.1-61)
E N H G V H G V 00121][][=
=
于是
)e x p (
)
1
(
)(02
2
/100E
N G
E
N H G p -=π (3.1-62)
))(e x p (
)
1
()(02
2
/101E
N E G E
N H G p --=π (3.1-63)
以及
G E
N G
E
N P T
V d )exp()
1
(
02
2
/10-
=
?
∞
πα (3.1-64)
式中T V 是由式(3.1-18)确定的判决门限。令G E
N u 2
/10)
2(=,代入(3.1-63)进行变量
置换,可得到
)(d 212
2
βπ
β
αe r f c u e
P u
==
?∞
- (3.1-65)
式中2
/10)
2(
E
N V T =β,由给定的虚警概率αP 决定。)(?erfc 为误差函数积分。
用同样方法,可得到检测概率d P 为
)
(d 21
d ])(
e x p [
)1
(
2
/10
2
)
2(
2
02
2
/10d e r f c u e
G
E
N E G E
N P N E u
V d T
-==
--=
??
∞--∞
βπ
πβ
(3.1-66)
式中2
/10
)
2(
N E d =称为信噪比。
式(3.1-65)、(3.1-66)给出了αP 、d P 和d 三者之间的关系。根据这个关系,可画出如图3.1-5所示的接收机工作特性。图中d 为参变量。实用上,更为方便的形式是以αP 为变量,作出d P 与d 的关系曲线,如图3.1-6所示。
常常用最低可检测信号的信噪比来描述检测系统的有效性。所谓最低可检测信号的信噪比,就是指在给定的虚警概率αP 下,达到某个检测概率d P 所需要的信噪比之值
2
/10
)
2(
N E d =。例如,当10
10-=αP ,要求αP 达到9.0=d P ,从图3.1-6的检测特性曲线
中,可以得到6.7=d 。
图3.1-5 接收机工作特性 图3.1-6 d P a -曲线
§3.2 色高期噪声中已知信号的检测
在上一节中,讨论了在平稳白高斯噪声中已知信号的检测。现在,把条件稍加放宽:假定噪声是平稳色高斯噪声。
仍然先讨论雷达信号检测系统。相应于两种假设下接收端输入的混合波形为
)
0()0()
()()(:)()(:10T t T t t n t s t r H t n t r H ≤≤≤≤+== (3.2-1)
式中,)(t s 是已知信号,)(t n 是平稳色高斯噪声。
虽然,我们仍然可以象在§3.1中那样根据取样定理,将)(t n 展开成式(3.1-3)的形式
)
()
(s i n ..)(1
k Wt k Wt n m i l t n k
TW
k --=∑=ππ (3.2-3)
但是,对于色噪声来说,这时)(t n 的振幅样本k n 不再是相互独立的随机变量。因此,n
的联合概率密度不再等于各个样本概率密度的乘积。即
∏
=≠
=WT
k k k n p N k n p 1
)(),,2,1,(
因此,便难于象在§3.1中那样求出用连续波形表示的极限形式(见式(3.1-14)、(3.1-15))。
为了克服这个困难,我们可以不直接利用振幅样本,而是利用其它方法,来产生独立的样本,用它们重新构成信号并给以统计描述。利用Karhunen-Loeve 展开式,便可达到这一目的。
3.2-1 Karhunen-Loeve 展开式
这种方法,是把接收到的混合波形按一组正交的基本函数)}({t g n 展开。通过适当地选择基本函数)}({t g n ,可以使各个加权系数不相关的随机变量。
任一随机过程)(t X ,若它的自相关函数),(t s R 有界,以及在s ,t 连续,那么,在时间区间),0(T 内可将它展开成
)(..1)(1
t g m i t x n n TW
k β∑==
(3.2-2)
上式中成立的条件是,基本函数组)}({t g n 必须满足下面的积分方程
?
=
T
n n n s s g t s R t g 0
d )(),()(λ
(3.2-3)
式中),(t s R 是随机过程)(t X 的自相关函数。上式称为齐次积分方程,按照积分方程的术语,称),(t s R 为积发方程的核函数,称)}({t g n 为该方程的本征函数(或特征函数),称}{n λ为本征值(或特征值)。
式(3.2-2)并具有以下性质: 1.)}({t g n 为正交函数集。即
?
??
?≠===T
mn m n n
m n m t t g t g 0
1
d )()(δ (3.2-4)
2.加权系数由下式决定
?
=
T
n n t t g t X 0
d )()(β
(3.2-5)
3.加权系数}{n β是不相关的随机变量
下面,我们来证明上述三个性质。根据式(3.2-3),有
s
s g t g t
t g t s R s t g s
s g t s R t t g t g t t g t g t g T
n m m
T
m T
n T
n T
m T
n n m T
m n n d )()(d )(),(d )(d )(),(d )()(d )()()(0
0000
?
??
????==
=?=
λλλ
即
??=T
m n m T m n n s s g s g t t g t g 0
d )()(d )()(λλ
上式又可写成
?=-T
m n m n t t g t g 00d )()()(λλ
(3.2-6)
因为,一般来说,)(n m m n ≠≠λλ。因此上式成立的必要条件是
n m t g t g T
m n ≠=?
)()(0
这就证明了,)}({t g n 为正交函数集。
若展开了(3.2-2)成立,则有
∑?
∑?
?
===
=
N
m m T
n m
N m m m T
n T
n t t g t g t t g t g t t g t X 1
1
d )()(d )()(d )()(ββ
利用)}({t g n 的正交性质,上式变成
∑?
===
N
m n mn m
T
n t t g t X 1
d )()(βδβ
这就证明了式(3.2-5)。
?
=
T
n n t t g t X 0
d )()(β
(3.2-5)
从上式还可以看出,系数n β是一个随机变量,因为它是)(t X 线性变换的结果。利用式(3.2-5)可以得到
n
m n m t t g t g t t g t g t t g t t R t t g t t t x t x E t g t g t t g t X t t g t X E E n
mn n n T m n n n T
m T n T
m T T
n m T
n T
m m n ≠=??
?====
=
==??
????
??0
d )()(d )()(d )(),(d )(d d )]()([)()(]
d )()(d )()([][110
11
10
10
22211010
2
121210
2220
111λδλλλββ (3.2-8)
上式证明了}{n β是不相关的随机系数。 3.2-2 已知信号的检测
有了前面的展开式(3.2-2),我们便可以用与§3.1中类似的方法来处理色高斯噪声中已知信号的检测问题。
我们已知,在两种假设的输入混合波形为
)
()()(:)
()(:10
t n t s t r H t n t r H
+==
按照Karhunien-Loeve 展开式,可将)(t n 展开成
∑∞
=≤≤≈
1
)0()
()(k k k
T t t g n
t n (3.2-9)
式中
?
=
T
k k t t n t g n 0
d )()(
(3.2-10) ik k k i n n E δλ=][
(3.2-11)
我们可以用类似的方法,将信号)(t s 混合波形)(t r 按正交函数组展开
∑∞
==
1
)()(k k k
t g s
t s
(3.2-12)
t t s t g s T
k k d )()(0
?
=
(3.2-13)
∑∞
=≈
1
)()(k k k
t g r
t r
(3.2-14)
t t r t g r T
k k d )()(0
?
=
(3.2-15)
为了计算似然比,我们先求似然函数)(0H r p
和)(1H r p 。按照定义
k k k n r N k r p H r p ===),,,2,1,()(0
按照Karhunen-Loeve 展开式,}{k n 是不相关的随机变量。又因为k n 是高斯过程)(t n 线性变换的结果,故k n 又是独立随机变量。于是,我们可得到
∏
===N
k k k n p N k n p 1
)(),,2,1,(
(32-16)
假设)(t n 的均值为零。则从式(3.2-10)有 0][=k n E (3.2-17)
从式(3.2-11)可以得到k n 的方差为
k k n E λ=][2
(3.2-18)
于是,可得到)(0H r p
为
∏∏
==-
==
N
k k
k
k
N
k k r r p H r p 1
2
2
1
1
0)2exp()21(
)()(λπλ
(3.2-19)
用同样的方法,可得到
∏
∏
==--
=
+==
N
k k
k k k
N
k k k k k s r n s r r p H r p 1
2
21
11]
2)(exp[)21(),()(λπλ
(3.2-20)
于是,可得到似然比为
)
22exp(
)
2exp(]2)(exp[)
2exp()21
(]
2)(exp[)21
()
()()(1
2
1
21
2
1
2
2
1
1
2
21
01∑
∑
∑∏∏=====-=---=
-
--
==N
k k
k
k k N
k k
k
N
k k
k k N k k
k
k
N
k k k k k
s r s r
s r r s r H r p H r p r λλλλπλ
λπλ
Λ
(3.2-21)
于是,似然比判决规则为
ηΛ0
1
)(H H r ≥
< (3.2-22)
式中η为判决门限,它取决于所用的判决规则。取对数似然比,可以得到等效的判决规则为
ηΛln )(ln 01
H H r ≥
<
或 ηln 0
1
H H G ≥
< (3.2-23)
式中G 为统计检验量。
下面,我们求G 的等效形式
∑∑
==-=
-=
N
k k k k
k
N
k k
k
k k s r s s r s G 1
1
2
)2(2
1
22λλ (3.2-24)
利用式(3.2-13)和式(3.2-15),可以得到 []t t g
t s t r t t g t s t t g t r S r k
Y
k T
k T
k k d )()()(2d )()(d )()(220
0??
?-=
-
=- (3.3-25)
代入(3.2-24),有
[]t t h t s t r t t g s t s t r t
t g t s t r s G T
N T N
k k k k T
k
N
k k
k
d )()(21)(d )()(21)(d )()()(221
01
1
?
?∑?∑??
????-=
???
???-=
-=
==λλ
(3.2-26)
式中
∑
==
N
k k k
k
N t g s t h 1
)()(λ
(3.2-27)
在∞→N 的极限情况下,(3.2-26)变成为
t t h t s t r G T
d )()(21)(0
?
??
?
???-=
(3.2-28)
∑
∞
==
1
)()(k k k
k
t g s t h λ
(3.2-29)
以),(τt R 乘上式等号的左、右两端,并在区间)0(T ≤≤τ上积分有
∑∑?
?
∞
=∞
==
=
1
1
)(d )(),(),()(k k k
k k T
k
k
T
t g s
g t R s d t R h τττλτττ
(3.2-30)
利用式(3.2-12)∑∞
==
1
)()(k k k
t g s
t s ,上式变成
)(),()(0
t s d t R h T
=?
τττ (3.2-31)
上式告诉我们,由式(3.2-28)所示的统计G 的表示式中,)(t h 是积分方程(3.2-31)的
解。
将式(3.2-28)所表示的G (3.2-23)可得到判决规则为
ηln d )()(21)(0
1
H H t t h t s t r T
≥
?
???-?
(3.2-32)
或其等效判决规则为
(单选题)1: 哪些不属于涡轮式流量计的特点()。 A: 有较高的精确度 B: 量程比宽 C: 测量范围宰 D: 动态特性好 标准解答: (单选题)2: 哪些属于浮力式液位计的优点()。 A: 结构简单 B: 直观可靠 C: 对于外界温度、湿度、压力等因素影响较小 D: 以上全对 标准解答: (单选题)3: 不属于负温度系数热敏电阻NTC的优点的是()。A: 温度系数高 B: 连接导线的阻值几乎对测温没有影响 C: 非线性严重,需线性化处理 标准解答: (单选题)4: 哪些不属于超声波物位传感器的缺点()。 A: 非接触测量 B: 不能承受高温 C: 电路复杂、造价高 D: 无法用于对声波吸收能力较强的介质 标准解答: (单选题)5: 非接触式测温仪表特点描述错误的是()。 A: 检测部分与被测对象不直接接触 B: 不破坏原有温场 C: 便于对运动物体测量 D: 容易破坏原有温场 标准解答: (单选题)6: 哪些属于电容式压力传感器的优点()。 A: 灵敏度高 B: 动态响应快 C: 非线性较严重 D: 内部没有较明显的位移元件,寿命长 标准解答: (单选题)7: 文氏电桥测频法描述错误的是()。 A: 测量精确度大约是正负(0.5~1)% B: 在高频时,测量精确度大大降低
C: 在低频时,测量精确度大大降低 D: 这种测频法仅适用于10khz以下的音频范围。 标准解答: (单选题)8: 铜电阻的特点描述错误的是()。 A: 价格便宜 B: 精度较低 C: 易于氧化 D: 精度较高 标准解答: (单选题)9: 哪些属于常用的容积式流量计()。 A: 活塞式流量计 B: 刮板式流量计 C: 腰轮流量计 D: 以上全对 标准解答: (单选题)10: 哪些属于超声波流量计的主要优点()。 A: 均为线性特性 B: 可以实现非接触测量 C: 精度很高 标准解答: (单选题)11: 弹性压力传感器的特点描述正确的是()。 A: 结构简单 B: 测量范围大、精度高 C: 线性特性较好 D: 以上全对 标准解答: (单选题)12: 关于模拟法的特点描述错误的()。 A: 简单 B: 经济 C: 目前在有些场合仍然被采用 D: 它是目前最好的测量频率的方法 标准解答: (单选题)13: 关于热敏电阻的类型和特点描述错误的是()。A: 负温度系数热敏电阻NTC是一种连续作用的温度传感器B: PTC型热敏电阻是一种位式温度传感器 C: CTR型热敏电阻也是一种位式温度传感器 D: 以上全不对 标准解答:
第一章绪论 1.(单选题) 根据误差的统计特征可以将误差分为(C),随机误差和粗大误差。 (A)器具误差(B)方法误差(C)系统误差(D)观测误差 2.(单选题) 下列不属于量值的是(D)。 (A)2m (B)30kg (C)4s (D)A 3.(单选题) 以下不属于七个基本量纲的是(A)。 (A)S (B)L (C)T (D)M 4.(单选题) 以下属于辅助单位的是(B )。 (A)千克(B)弧度(C)安培(D)秒 5.(单选题) 按传感器是否与被测物体作机械接触的原则可分为(A)。 (A)接触测量与非接触测量(B)直接测量与间接测量(C)静态测量与动态测量(D)在线测量与离线测量 6.(单选题) 相对误差是指误差与(A)的比值。 (A)真值(B)测量值(C)绝对误差(D)随机误差 7.(单选题) 人为误差主要包括(C)。 (A)器具误差与方法误差(B)调整误差与观测误差(C)调整误差与观测
误差(D)观测误差与环境误差 8.(单选题) 将直接测量值或间接测量值与被测量值之间按已知关系组合成一组方程,通过解方程组求得被测值的方法为(D)。 (A)直接测量(B)间接测量(C)绝对测量(D)组合测量 9.(单选题) 表示测量结果中系统误差大小程度的为(B)。 (A)测量精密度(B)测量正确度(C)测量准确度(D)测量不确定度 10.(单选题) 由于测量数据分布情况复杂,应当经过消除系统误差、(A)和剔除含有粗大误差数据三个步骤。 (A)正态性检验(B)消除示值误差(C)消除固有误差(D)消除重复性误差11.(单选题) 关于真值的描述,不正确的是(C)。 (A)真值是无法获得的(B)可用被测量的实际值作为“约定真值” (C)真值并不是一个理想概念(D)可用被测量的平均值作为“约定真值” 12.(单选题) 以下为导出单位的是(D)。 (A)米(B)开尔文(C)弧度(D)加速度 第二章信号及其描述 1.(单选题) (D)中那些不具有周期重复性的信号称为非周期信号。
一. 判断题 【】1. 磁电式速度传感器是利用电磁感应原理。对 【】2. 测量正确度描述了测量结果中粗大误差大小的程度。错 【】3. 确定信号中那些不具有周期重复性的信号称为非周期信号。对 【】4. 当一个空气微粒偏离其平衡位置时,就有一个压力的临时增加,据此可描述声强为功率面积。错 【】5. 应变片式位移传感器是将位移量转换为应变量。对 二. 单向选择 1.通过与国家基准对比或校准来确定量值单位的为 B 。 A.国家基准(B) 副基准 C.计量基准 D.企业基准 2.下列不属于量值的是 D 。 A. 2m B.30kg C.4s D. A 3.同一量多次测量时,误差的正负号和绝对值以不可预知的方式变换称为 B 。 A.系统误差 B.随机误差 C.相对误差 D.绝对误差 4. D 中那些不具有周期重复性的信号称为非周期信号。 A.离散信号 B.阶跃信号 C.不确定信号 D.确定信号 5.周期信号的强度可用峰值、 C 、有效值、和平均功率来描述。 A.真值 B.均值 C.绝对均值 D.均方根值 6.信号的时域描述是就 B 而言。 A.频率 B.时间 C.周期 D.振幅 7.测量装置的静态特性包括线性度、灵敏度、回程误差、 C 等。 A.传递函数 B.频率响应函数 C.分辨力 D.脉冲响应函数 8. D 晶体,当受到外力作用时,不会产生压电效应。
A. 石英 B. 钛酸钡 C. 锆钛酸铅 D.硫酸钙 9.在抗干扰设计时,将各单元电路的地点顺序连接在一条公共的地线上称为 D 。 A.多点接地 B.单点接地 C.并连接地 D.串联接地 10.传递函数H(S)与 A 及系统的初始状态无关。 A.输入x(t) B.装置的传输特性 C.装置的结构 11.电容传感器变换原理不包括 B 。 A. 变面积 B. 变温度 C. 变极距 D.变介质 12.低通滤波器允许其截至频率 A 的频率成分通过。 A. 以下 B. 以上 C. 两个区间范围以内 D. 两个区间范围以外 13.在光照作用下,物体内的电子从物体表面逸出的现象称为 C 。 A. 光生伏打效应 B. 内光电效应 C. 外光电效应 D.光电池效应 14.自相关函数为 B 。 A. 奇函数 B. 偶函数 C. 非奇非偶函数 15.回转轴径向运动误差测量时,有时不必测量总的径向运动误差,而只将一只传感器置于 该方向来检测,这种方式称为 D 测量法。。 A.轴向 B. 径向 C. 双向 D. 单向 三. 概念解释题 1.线性度: 仪表的静态输入——输出校准(标定)曲线与其理论拟合直线之间的偏差。 2.测量精密度 : 对某一稳定的被测量在相同的规定的工作条件下,由同一测量者,用
《测试技术与信号处理》习题答案 第二章 信号分析基础 1、请判断下列信号是功率信号还是能量信号: (1))()(10cos 2 ∞<<-∞=t e t x t π (2))()(||10∞<<-∞=-t e t x t 【解】(1)该信号为周期信号,其能量无穷大,但一个周期内的平均功率有限,属功率信号。 (2)信号能量:? ∞ ∞ -= =10 1 )(2dt t x E ,属于能量信号。 2、请判断下列序列是否具有周期性,若是周期性的,请求其周期。)8 ()(π-=n j e n x 【解】设周期为N ,则有:8 )8 8()()(N j N n j e n x e N n x ?==+-+π 若满足)()(n x N n x =+,则有1)8/sin()8/cos(8/=-=-N j N e jN 即:k N π28/=,k N π16=,k = 0,1,2,3,… N 不是有理数,故序列不是周期性的。 3、已知矩形单脉冲信号x 0(t)的频谱为X 0(ω)=A τsinc(ωτ/2) ,试求图示三脉冲信号的频谱。 【解】三脉冲信号的时域表达式为:)()()()(000T t x t x T t x t x -+++= 根据Fourier 变换的时移特性和叠加特性,可得其频谱: )]cos(21)[2 ( sin )()()()(000T c A e X X e X X T j T j ωωτ τωωωωωω+=++=- 4、请求周期性三角波(周期为T ,幅值为0—A )的概率分布函数F(x)与概率密度函数p(x) 。 【解】在一个周期T 内,变量x (t )小于某一特定值x 的时间间隔平均值为:T A x t i = ? 取n 个周期计算平均值,当∞→n 时,可有概率分布函数:A x nT t n x F i n =?=∞→lim )( 概率密度函数:A dx x dF x p 1 )()(== t -τ/2 0 τ/2 -T T
测试技术与信号处理课后答案
机械工程测试技术基础习题解答 教材:机械工程测试技术基础,熊诗波 黄长艺主编,机械工业出版社,2006年9月第3版第二次印刷。 第一章 信号的分类与描述 1-1 求周期方波(见图1-4)的傅里叶级数(复指数函数形式),划出|c n |–ω和φn –ω图,并与表1-1对比。 解答:在一个周期的表达式为 00 (0)2() (0)2 T A t x t T A t ? --≤
2 1,3,, (1cos) 00,2,4,6, n A n A c n n n n ? =±±± ? ==-=? ?=±±± ? L L ππ π 1,3,5, 2 arctan1,3,5, 2 00,2,4,6, nI n nR π n cπ φn c n ? -=+++ ? ? ? ===--- ? ? =±±± ? ?? L L L 没有偶次谐波。其频谱图如下图所示。 1-2 求正弦信号0 ()sin x t xωt =的绝对均值xμ和均方根值rms x。 解答:0000 22 00 000 2242 11 ()d sin d sin d cos T T T T x x x x x μx t t xωt tωt tωt T T T TωTωπ ====-== ??? rms x==== 1-3 求指数函数()(0,0) at x t Ae a t - =>≥的频谱。 解答: (2) 22 022 (2) ()() (2)2(2) a j f t j f t at j f t e A A a j f X f x t e dt Ae e dt A a j f a j f a f -+ ∞∞ ---∞ -∞ -===== -+++ ??π ππ π πππ () X f= π /2 0ω 00 幅频 图 相频 图 周期方波复指数函 数形式频谱图 πω ω0 ω0
地大《检测与信号处理技术》在线作业一 一、单选题(共 15 道试题,共 30 分。) 1. 与热电阻相比负温度系数热敏电阻NT的特点描述正确的是()。 . 电阻温度系数大、灵敏度高 . 结构简单,体积小,可以测量点温度 . 电阻率高,热惯性小,适宜动态测量 . 以上全对 正确答案: 2. 哪些属于超声波流量计的主要优点()。 . 均为线性特性 . 可以实现非接触测量 . 精度很高 正确答案: 3. 为保证接入补偿导线后不影响原热电偶回路热电势的测量值,必须注意()。. 补偿导线的热电特性在一定范围内,要与所配用的热电偶的热电特性相同 . 补偿导线与热电偶的两个接点的温度必须相同 . 补偿导线的正负极以其绝缘层的颜色来区分 . 以上全对 正确答案: 4. 文氏电桥测频法描述错误的是()。 . 测量精确度大约是正负(0.5~1)% . 在高频时,测量精确度大大降低 . 在低频时,测量精确度大大降低 . 这种测频法仅适用于10khz以下的音频范围。 正确答案: 5. 哪些不属于转子流量计的优点()。 . 结构复杂 . 仪表的尺寸小 . 工作可靠 . 压力损失小 正确答案: 6. 哪些不属于靶式流量计的特点()。 . 结构复杂 . 结构简单 . 安装维护方便 . 不易堵塞 正确答案: 7. 哪些属于电阻应变片的结构()。
. 敏感栅 . 基底 . 覆盖层 . 以上全对 正确答案: 8. 弹性压力传感器的特点描述正确的是()。 . 结构简单 . 测量范围大、精度高 . 线性特性较好 . 以上全对 正确答案: 9. 选择流量计须考虑()。 . 测量条件 . 仪表价格 . 管道尺寸 . 以上全对 正确答案: 10. 根据电测量方法的不同,可将弹性压力传感器划分为()。. 电位器式压力传感器 . 电感式压力传感器 . 电容式压力传感器 . 以上全对 正确答案: 11. 哪些不属于超声波物位传感器的缺点()。 . 非接触测量 . 不能承受高温 . 电路复杂、造价高 . 无法用于对声波吸收能力较强的介质 正确答案: 12. 常用的弹性压力敏感器有()。 . 弹簧管 . 波纹管 . 膜片与膜盒 . 以上全对 正确答案: 13. 符合热电偶测温的特点的有()。 . 热电偶一般是不需电源的发电式传感器 . 感温部分是很小的焊点,所以一般测量的是某点的温度 . 同类材料制成的热电阻不如热电偶测温上限高 . 以上都对 正确答案: 14. 谐振法测频法描述错误的是()。 . 测量精确度大约是正负(0.25~1)% . 常作为频率粗测手段
检测技术与信号处理模拟题 一、单项选择题 1、引用误差是()与引用值之比。 A、随机误差 B、粗大误差 C、系统误差 D、绝对误差 2、模拟显示仪器一个共同的缺点是()。 A、读数的多值性 B、测量不精确 C、不能数字显示 D、读数直观 3、阶跃响应到达稳态值50%所需的时间为()。 A、延迟时间 B、上升时间 C、峰值时间 D、调节时间 4、时域中计算的信号总能量等于在频域中计算的信号()。 A、自功率谱积分 B、平均功率 C、互功率谱积分 D、总能量 5、对灵敏度几乎无影响的因素是()。 A、被测材料的电导率和导磁率 B、表面微裂缝 C、被测件是小圆柱时其直径与线圈直径之比 D、表面粗糙度 6、同一量多次测量时,误差的正负号和绝对值以不可预知的方式变换称为()。 A、系统误差 B、随机误差 C、相对误差 D、绝对误差 7、周期信号的强度可用峰值、()、有效值、和平均功率来描述。 A、真值 B、均值 C、绝对均值 D、均方根值 8、阿贝原则是指在测量长度时,若被测物体的尺寸线和测量器具的标准尺寸线(),就能最大限度地减小测量误差。 A、垂直 B、平行 C、共线 D、相逆 9、信号的时域描述是就()而言。 A、频率 B、时间 C、周期 D、振幅 10、下列不属于量值的是()。 A、m B、10kg C、4V D、1A 二、判断题 【】1、测量方法按照传感器是否与被测物体作机械接触,可以分为接触测量和非接触测量。 【】2、非线性特性是测试装置(系统)的主要性能要求之一。 【】3、测试装置传递函数H(s)与输入量x(t)无关。 【】4、传递函数H(S)与输入x(t)及系统的初始状态有关。 【】5、磁电式速度传感器是利用电磁感应原理。 【】6、簧片属于常用弹性式压力敏感元件。 【】7、红外线的波长大致在0.9-100μm范围内。 【】8、光敏传感器其工作原理是利用半导体材料的光电效应。 【】9、应以最多的测点达到足够真实地反映结构受力状态的原则来进行应力测量。
《信号检测与估计》总复习 2005.4 第一章 绪 论 本章提要 本章简要介绍了信号检测与估计理论的地位作用、研究对象和发展历程,以及本课程的性能和主要内容等。 第二章 随机信号及其统计描述 本章提要 本章简要阐述了随机过程的基本概念、统计描述方法,介绍了高斯噪声和白噪声及其统计特性。 本章小结 (1)概率分布函数是描述随机过程统计特性的一个重要参数,既适用于离散随机过程,也适用于连续随机过程。一维概率分布函数具有如下性质 1),(0≤≤t x F X []0)(),(=-∞<=-∞t X P t F X ; []1)(),(=+∞<=+∞t X P t F X ; ),(),())((1221t x F t x F x t X x P X X -=<≤; 若 21x x <,则),(),(12t x F t x F X X ≥ 概率密度函数可以直接给出随机变量取各个可能值的概率大小,仅适用于连续随机变量。一维概率密度具有如下性质: 0),(≥t x f X ; 1 ),(=? +∞ ∞ -dx t x f X ; x d t x f t x F x X X ' '=? ∞ -),(),(; []?=-=<≤2 1 ),(),(),()(1221x x X X X dx t x f t x F t x F x t X x P (2)随机过程的数字特征主要包括数学期望、方差、自相关函数、协方差函数和功率谱密度。分别描述了随机过程样本函数围绕的中心,偏离中心的程度、样本波形两个不同时刻的相关程度、样本波形起伏量在两个不同时刻的相关程度和平均功率在不同频率上的分布情况。定义公式分别为: []dx t x xf t X E t m X X ?+∞ ∞ -==),()()( []{} []dx t x f t m x t m t X E t X X X X ? +∞ ∞ --=-=),()()()()(2 22 σ []2 12121212121),,,()()(),(dx dx t t x x f x x t X t X E t t R X X ? ? +∞∞-+∞ ∞ -== [][]{} [][]2 121212211 221121),,,()()()()()()(),(dx dx t t x x f t m x t m x t m t X t m t X E t t C X X X X X X ? ?∞+∞-∞+∞ ---=--=
检测技术中的信号处理技术 【摘要】无损检测技术,简称NDT,作为一门新兴的综合性应用学科,它是提高产品质量,促进技术进步的重要手段,可提高社会生产力,促进经济和技术的不断发展。它作为机械工程发展的灵魂,反映着一个国家工业化的水平,其新技术的广泛应用更是促进工业进步的积极因素。本文简单介绍磁性无损检测技术,并对其对信号的处理技术进行具体分析。。 【关键词】磁性无损检测技术;信号测量;信号处理 0 引言 随着电子技术,特别是计算机技术的不断发展,很大程度上提高了我国检测设备的相关性能,并使之朝着计算机化、定量化和智能化的方向前进。而信息处理技术对检测设备的总体性能起了决定作用,也是磁性无损技术检测设备的技术指标依据。它通过对探头输出的检测信号进行相应的处理,提高其信号的信噪比和抗干扰能力,进一步对信号进行识别、分析、显示、存储和记录,以满足各种检测性能的要求。 1 磁性无损检测技术 检测技术中一个重要组成部分——无损检测,它作为一种非破坏性的检测技术,是在对原材料和成品不损伤的前提下,对其内部和表面有无缺陷情况进行研究。由于材料内部及表面若存在问题,检测系统中的相关指标就会发生相应的变化。无损检测就是利用这一变化来研究、评价结构异常和缺陷的存在,及其可能带来的危害程度。与破损检测相比,它不需要改变物件的状态和使用性能,而是直接对使用中的材料的内部结构与缺陷情况进行测试,从而推断出材料的剩余使用寿命与相应的承载能力等。通常情况下,其检测主要有目视法、超声波法、涡流法、磁性检测法等几种检测方法。对于磁性无损检测,它探头装置结构简单,成本低,灵敏度高,且便于对信号的处理,实现非接触检测与在线实时检测。因此,在实际生活中,它的应用是最广泛的,被公认为目前既经济又可靠、实用的检测方法。 2 磁性无损检测技术的信号处理技术 磁性无损检测就是以磁场为媒介将被测物的状态或量转化为可测量的磁场信号,然后再由磁电转化器件或传感器进一步转变成相应的电信号,最后对所得信息进行分析和处理。因此,磁场信号的形成和测量是该检测技术的基础部分,而对信息的处理则是其核心部分。 2.1 磁场信号的形成 该检测技术主要是采用有源磁场检测法(AFT ),将被测对象进行磁源
现代测试技术及信号处理发展现状及趋势 曹修全 摘要:随着IT产业和通讯技术、电子技术、计算机技术的高速发展,生产设备和产品的电子化、数字化、自动化、智能化的程度越来越高,对与之配套的测试技术与信号处理技术提出了更好的要求。因此,笔者查阅了有关现代测试技术和信号处理技术的国内外文献,就现代测试技术和信号处理技术的发展现状进行概略介绍,并分析其存在的问题,进而提出了该类技术的发展趋势。 关键词:测试技术,信号处理,现状,趋势 引言 进入21世纪以来,测控技术和自动测试系统已经广泛的渗入到了生产、科研、试验活动等领域。自动测控技术已经在通信、汽车、机电、冶金、石化、建筑、纺织、电力、高等教育等众多领域[1-10]得到了广泛的应用,并与相关技术紧密集合,促进了生产力的发展。随着IT产业和通讯技术、电子技术、计算机技术的高速发展,生产设备和产品的电子化、数字化、自动化、智能化的程度越来越高,对与之配套的测试技术与信号处理技术提出了更好的要求。综合了通信技术、测量技术、电子技术、自动化技术和计算机技术于一体的广域的自动测试系统的研发,已经成了国内外知名厂家的重大课题。 现代测试技术和信号处理技术作为自动测试系统的发展基础,为了更好的发展自动测试系统,解决诸多企业当前面临的自动测试问题,有必要对现代测试技术和信号处理技术进行一个全面的了解,通过分析其发展现状,找出制约其发展的关键因素,从而为该技术的发展提出解决方案。 因此,笔者基于抛砖引玉的想法,在查阅了现代测试技术和信号处理技术相关文献[11-18]的基础上,对该技术的国内外现状进行了总结,并基于此指出了该技术在过去的发展过程中存在的问题与不足,进而提出了该技术的发展趋势。国内外发展现状 测试技术是综合了测量与试验的一门综合性技术,具体来讲它是通过技术手段获取研究对象的状态信息,以一定的精度描述和分析其运动状态,是科学研究
测试技术与信号处理习题解答 第一章 信号的分类与描述 1-1 求周期方波(见图1-4)的傅里叶级数(复指数函数形式),划出|c n |–ω和φn –ω图,并与表1-1对比。 解答:在一个周期的表达式为 00 (0)2() (0) 2 T A t x t T A t ? --≤
没有偶次谐波。其频谱图如下图所示。 1-2 求正弦信号0()sin x t x ωt =的绝对均值x μ和均方根值rms x 。 解答:0 000 2200000 224211()d sin d sin d cos T T T T x x x x x μx t t x ωt t ωt t ωt T T T T ωT ωπ ====-==??? 2 222 00rms 000 111cos 2()d sin d d 22 T T T x x ωt x x t t x ωt t t T T T -====??? 1-3 求指数函数()(0,0)at x t Ae a t -=>≥的频谱。 解答: (2)220 22 (2) ()()(2) 2(2)a j f t j f t at j f t e A A a j f X f x t e dt Ae e dt A a j f a j f a f -+∞ ∞ ---∞-∞ -==== =-+++??πππππππ 2 2 ()(2) k X f a f π= + Im ()2()arctan arctan Re ()X f f f X f a ==-π? 1-4 求符号函数(见图1-25a)和单位阶跃函数(见图1-25b)的频谱。 单边指数衰减信号频谱图 f |X (f )| A /a φ(f ) f π/2 -π/2 |c n | φn π/2 -π/2 ω ω ω0 ω0 3ω0 5ω0 3ω0 5ω0 2A/π 2A/3π 2A/5π 幅频图 相频图 周期方波复指数函数形式频谱图 2A/5π 2A/3π 2A/π -ω0 -3ω0 -5ω0 -ω0 -3ω0 -5ω0
1、间接测量:测量几个被测量有关的物理量,通过函数关系式计算出被测量的数值。 2、系统误差:指误差变化规律服从某一确定规律的误差。 3、灵敏度:迟滞特性表明仪表在正(输入量增大)反(输入量减小)行程期间输入——输出曲线不重合的程度。 4、迟滞:迟滞特性表明仪表在正(输入量增大)反(输入量减小)行程期间输入——输出曲线不重合的程度。 5、绝对压力:指直接作用于容器或物体表面的压力,即物体承受的实际压力,其零点为绝对真空,符号为PABS(ABS为下标)。 二、简答题: 1、检测与测量的区别 解答:检测主要包括检验和测量两方面的含义。检验是分辨出被测参数量值所归属的某一范围带,以此来判别被测参数是否合格或现象是否存在。测量是把被测未知量与同性质的标准量进行比较,确定被测量对标准量的倍数,并用数字表示这个倍数的过程。 2、产生系统误差的常见原因有哪些? 产生系统误差的常见原因有:仪器误差、环境误差(影响误差)、理论误差与方法误差和人员误差。 3、标准电极定律的实用价值是什么? 如果两种导体A、B分别与第三种导体C组成热电偶产生的热电动势已知,则由这两个导体A、B组成热电偶产生的热电动势可由下式计算:
这里采用的电极称为标准热电极,在实际应用中,一般标准热电极材料为纯铂。这是因为铂易得纯态,物理化学性质稳定,熔点较高。由于采用了标准电极,大大方便了热电偶的选配工作,只要知道了一些材料与标准热电极相配的热电动势,就可以用上述定律求出任何两种材料配成热电偶的热电动势。 1、按公式求圆柱体体积,若已知r约为4cm,h约为10cm,要使体积的相对误差等于2%,试问r 和h的测量的误差应为多少? 2、用镍铬一镍硅热电偶测量炉温,如果热电偶在工作时的冷端温度为30oC,测得的热电势指示值为33.6mV,求被测炉温的实际值? 四、查资料,简述一种温度测量应用的例子。(应用背景,工作原理,参考文献,字数在1000字以上) 一、热敏电阻 在测控系统和电子设备中,常常需要用到各种温度参数。测量温度的方法很多,可以采用专用的测温芯片或者利用热电偶和热敏电阻实现。但是要实时测量设备的环境工作温度,采用热敏电阻具有简单实用,最小限度的更改设备电路的优势。 热敏电阻的主要优点是电阻温度系数大,灵敏度高,响应速度快,能进行精密温度测量。NTC热敏电阻是一种氧化物的烧结体,具有负温度系数,与金属热电阻相比,电阻温度系数大,灵敏度约为金属热电阻的10倍,结构简单,电阻率小,适于动态测量。热敏电阻与电阻串并联组成的电路具有温度灵敏度高、电路简单、价格便宜等优点,在测试和自动控制领域得到广泛应用。
信号检测与估计理论简答题 1。维纳滤波器与卡尔曼滤波器的区别 维纳滤波器: 1)只用于平稳随机过程。 2)该系统常称为最佳线性滤波器。它根据全部过去和当前的观测信号来估计信号的波形,它的解是以均方误差最小条件所得到的系统的传递函数H(Z )的形式给出的。 3)信号和噪声是用相关函数表示的。 卡尔曼滤波器: 1)平稳随机过程和不平稳随机过程均适用。 2)该系统常称为线性最优滤波器。它不需要全部过去的观测数据,可根据前一个的估计值和最近的观察数据来估计信号的当前值,它是用状态方程和递推方法进行估计的,其解是以估计的形式给出的. 3)信号和噪声是用状态方程和测量方程表示的. 2.解释白噪声情况下正交函数集的任意性 设)0)(()()(T t t n t s t x ≤≤+=中,噪声n(t)是零均值、功率谱密度为2/)(0N w P n =的白噪声,其自相关函数)(2)(0 u t N u t r n -= -δ。于是,任意取正交函数集)()},({t x t f k 的展开 系数 j x 和 k x (k=1,2,…)的协方差为 )])([(k k j j s x s x E --] )()()()([00??=T k j T du u f u n dt t f t n E ????????=T T k j dt du u f u n t n E t f 00)()]()([)(? ???????-=T T k j dt du u f u t t f N 0 00)()()(2 δjk k T j N dt t f t f N δ2)()(2 = =? 当k j ≠时,协方差0 )])([(=--k k j j s x s x E ,这说明,在n(t )是白噪声的条件下,取任 意正交函数集)}({t f k 对平稳随机过程k x (k =1,2,…)之间都是互不相关的。这就是白噪声条件下正交函数集的任意性。 3。请说明非随机参量的任意无偏估计量的克拉美—罗不等式去等号成立的条件和用途 克拉美-罗不等式] )),(ln [(1 ])?[(2 2θ θθ θ??≥-x p E E 或 )] ),(ln [(1 ])?[(22 2θθθ θ??-≥-x p E E 当且仅当对 所有的x 和θ 都满足 k x p )?(),(ln θ θθθ-=??时,不等式去等号成立。其中k 是任意非零常 数。 用途:当不等式去等号的条件成立时,均方误差取克拉美—罗界,估计量θ? 是无偏有效的。以此,随机参量下的克拉美-罗不等式和取等号的条件可用来检验随机参量θ的任意无偏估计量θ? 是否有效。若估计量无偏有效,则其均方误差可由计算克拉美-罗界求得。 4.简述最小的均方误差估计与线性最小均方误差估计的关系。 在贝叶斯估计中讨论的随机矢量θ的最小均方误差估计,估计矢量mse θ可以是观测矢量x 的非线性函数,而线性最小均方误差估计,估计矢量mse θ 一定是观测矢量x的线性函
检测与信号处理技术考核题答卷 一、名词解释: 1、传感器:将非电量转换为与之有确定对应关系的电量输出的器件或装置,它本质上是非电量系统与电量系统之间的接口。 2、引用误差:绝对误差与测量仪表的量程之比,用百分数表示 3、准确度:说明仪表的指示值有规律地偏离被测量真值的程度,准确度反映了测量结果中系统误差的影响程度。 4、量程:仪表所能测量物理量的最大值。 5、料位:物料的位置。 二、简答题: 1、直接测量和间接测量的区别 答:直接测量:在对被测量进行测量时,对仪器读数不经任何运算,直接得出被测量的数值。 间接测量:测量几个被测量有关的物理量,通过函数关系式计算出被测量的数值。直接测量特点:简单、方便,在实际中使用较多。 间接测量应用场合:1)无法采用直接测量方式; 2)直接测量不方便; 3)直接测量误差大。 2、中间导体定律的实用价值是什么? 答:由导体A、B组成的热电偶,当引入第三导体C时,只要保持第三导体两端温度相同,接入导体后回路总电动势不变。根据中间导体
定律,我们可以在回路中引入各种仪表和连接导线,只要保证两结点温度一致,就可以对热电动势进行测量,而不影响热电偶的输出。 3、原来测量水的差压式流量计、现在用来测量相同测量范围的油的流量,读数是否正确?为什么? 答:不正确。 因为压差一项。三、计算题: 与流体流量的关系中包含密度 1、测量某电路的电流I=10mA,电压U=10V, 测量的标准差分别为 ,求所耗功率P=UI及其标准差 解:P=UI=10V× 10m A=0.1W 。 ==Pσ 22 1.414mV=0.1)?(10+0.1)?= 10 2、对某量进行10次测量,测得数据为
一、概念: 1. 匹配滤波器。 概念:所谓匹配滤波器是指输出判决时刻信噪比最大的最佳线性滤波器。 应用:在数字信号检测和雷达信号的检测中具有特别重要的意义。在输出信噪比最大准则下设计一个线性滤波器是具有实际意义的。 2. 卡尔曼滤波工作原理及其基本公式(百度百科) 首先,我们先要引入一个离散控制过程的系统。该系统可用一个线性随机微分方程(Linear Stochastic Difference equation)来描述: X(k)=A X(k-1)+B U(k)+W(k) 再加上系统的测量值: Z(k)=H X(k)+V(k) 上两式子中,X(k)是k时刻的系统状态,U(k)是k时刻对系统的控制量。A和B是系统参数,对于多模型系统,他们为矩阵。Z(k)是k时刻的测量值,H是测量系统的参数,对于多测量系统,H为矩阵。W(k)和V(k)分别表示过程和测量的噪声。他们被假设成高斯白噪声(White Gaussian Noise),他们的covariance 分别是Q,R(这里我们假设他们不随系统状态变化而变化)。 对于满足上面的条件(线性随机微分系统,过程和测量都是高斯白噪声),卡尔曼滤波器是最优的信息处理器。下面我们来用他们结合他们的covariances 来估算系统的最优化输出(类似上一节那个温度的例子)。 首先我们要利用系统的过程模型,来预测下一状态的系统。假设现在的系统状态是k,根据系统的模型,可以基于系统的上一状态而预测出现在状态: X(k|k-1)=A X(k-1|k-1)+B U(k) (1) 式(1)中,X(k|k-1)是利用上一状态预测的结果,X(k-1|k-1)是上一状态最优的结果,U(k)为现在状态的控制量,如果没有控制量,它可以为0。 到现在为止,我们的系统结果已经更新了,可是,对应于X(k|k-1)的covariance还没更新。我们用P表示covariance: P(k|k-1)=A P(k-1|k-1) A’+Q (2) 式(2)中,P(k|k-1)是X(k|k-1)对应的covariance,P(k-1|k-1)是X(k-1|k-1)对应的covariance,A’表示A的转置矩阵,Q是系统过程的covariance。式子1,2就是卡尔曼滤波器5个公式当中的前两个,也就是对系统的预测。 现在我们有了现在状态的预测结果,然后我们再收集现在状态的测量值。结合预测值和测量值,我们可以得到现在状态(k)的最优化估算值X(k|k): X(k|k)= X(k|k-1)+Kg(k) (Z(k)-H X(k|k-1)) (3) 其中Kg为卡尔曼增益(Kalman Gain): Kg(k)= P(k|k-1) H’ / (H P(k|k-1) H’ + R) (4)
《检测与信号处理技术》模拟题 一.名词解释题 1.容许误差 [答案]:测量仪器在使用条件下可能产生的最大误差范围,它是衡量仪器的重要指标,测量仪器的准确度.稳定度等指标皆可用容许误差来表征. 2.附加误差 [答案]:当使用条件偏离规定的标准条件时,除基本误差外还会产生的误差. 3.动态误差 [答案]:在被测量随时间变化很快的过程中测量所产生的附加误差. 4.精确度 [答案]:它是准确度与精密度两者的总和,即测量仪表给出接近于被测量真值的能力,准确度高和精密度高是精确度高的必要条件. 5.迟滞 [答案]:迟滞特性表明仪表在正(输入量增大)反(输入量减小)行程期间输入——输出曲线不重合的程度. 6.静态误差 [答案]:测量过程中,被测量随时间变化缓慢或基本不变时的测量误差. 7.灵敏度 [答案]:它表征仪表在稳态下输出增量对输入增量的比值.它是静态特性曲线上相应点的斜率. 8.精密度 [答案]:对某一稳定的被测量在相同的规定的工作条件下,由同一测量者,用同一仪表在相当短的时间内连续重复测量多次,其测量结果的不一致程度,不一致程度愈小,说明测量仪表越精密,精密度反映测量结果中随机误差的影响程度. 9.灵敏限 [答案]:当仪表的输入量相当缓慢地从零开始逐渐增加,仪表的示值发生可察觉的极微小变化,此时对应的输入量的最小变化值称为灵敏限,它的单位与被测量单位相同. 10.重复性 [答案]:表示仪表在输入量按同一方向作全量程连续多次变动时,所有特性曲线不一致的程度.特性曲线一致,重复性好,误差也小. 11.线性度 [答案]:仪表的静态输入——输出校准(标定)曲线与其理论拟合直线之间的偏差. 12.分辨率
《检测与信号处理技术》模拟题(补) 一.名词解释 1、容许误差:测量仪器在使用条件下可能产生的最大误差范围,它是衡量仪器的重要指标,测量仪器的准确度、稳定度等指标皆可用容许误差来表征。 2、附加误差:当使用条件偏离规定的标准条件时,除基本误差外还会产生的误差。 3、动态误差:在被测量随时间变化很快的过程中测量所产生的附加误差。 4、精确度:它是准确度与精密度两者的总和,即测量仪表给出接近于被测量真值的能力,准确度高和精密度高是精确度高的必要条件。 5、迟滞:迟滞特性表明仪表在正(输入量增大)反(输入量减小)行程期间输入——输出曲线不重合的程度。 6、静态误差:测量过程中,被测量随时间变化缓慢或基本不变时的测量误差。 7、灵敏度:它表征仪表在稳态下输出增量对输入增量的比值。它是静态特性曲线上相应点的斜率。 8、精密度:对某一稳定的被测量在相同的规定的工作条件下,由同一测量者,用同一仪表在相当短的时间内连续重复测量多次,其测量结果的不一致程度,不一致程度愈小,说明测量仪表越精密,精密度反映测量结果中随机误差的影响程度。 9、灵敏限:当仪表的输入量相当缓慢地从零开始逐渐增加,仪表的示值发生可察觉的极微小变化,此时对应的输入量的最小变化值称为灵敏限,它的单位与被测量单位相同。 10、重复性:表示仪表在输入量按同一方向作全量程连续多次变动时,所有特性曲线不一致的程度。特性曲线一致,重复性好,误差也小。 11、线性度:仪表的静态输入——输出校准(标定)曲线与其理论拟合直线之间的偏差。 二.简答题 1、误差按其出现规律可分为几种,它们与准确度和精密度有什么关系? 答:误差按出现规律可分为三种,即系统误差、随机误差和粗大误差。 (1)系统误差是指误差变化规律服从某一确定规律的误差。系统误差反映测量结果的准确度。系统误差越大,准确度越低,系统误差越小,准确度越高。
机械工程测试技术基础习题解答 教材:机械工程测试技术基础,熊诗波 黄长艺主编,机械工业出版社,2006年9月第3版第二次印刷。 第一章 信号的分类与描述 1-1 求周期方波(见图1-4)的傅里叶级数(复指数函数形式),划出|c n |–ω和φn –ω图,并与表1-1对比。 解答:在一个周期的表达式为 00 (0)2 () (0) 2 T A t x t T A t ? --≤
1,3,5,2arctan 1,3,5,2 00,2,4,6,nI n nR π n c πφn c n ?-=+++???===---??=±±±??? 没有偶次谐波。其频谱图如下图所示。 1-2 求正弦信号0()sin x t x ωt =的绝对均值x μ和均方根值rms x 。 解答:0 000 2200000 224211()d sin d sin d cos T T T T x x x x x μx t t x ωt t ωt t ωt T T T T ωT ωπ ====-==??? rms x ==== 1-3 求指数函数()(0,0)at x t Ae a t -=>≥的频谱。 解答: (2)220 2 2 (2) ()()(2) 2(2) a j f t j f t at j f t e A A a j f X f x t e dt Ae e dt A a j f a j f a f -+∞ ∞ ---∞-∞ -==== =-+++??πππππππ ()X f = Im ()2()arctan arctan Re ()X f f f X f a ==-π? 幅频图 相频图 周期方波复指数函数形式频谱图