机械原理习题集答案
This model paper was revised by the Standardization Office on December 10, 2020
平面机构的结构分析
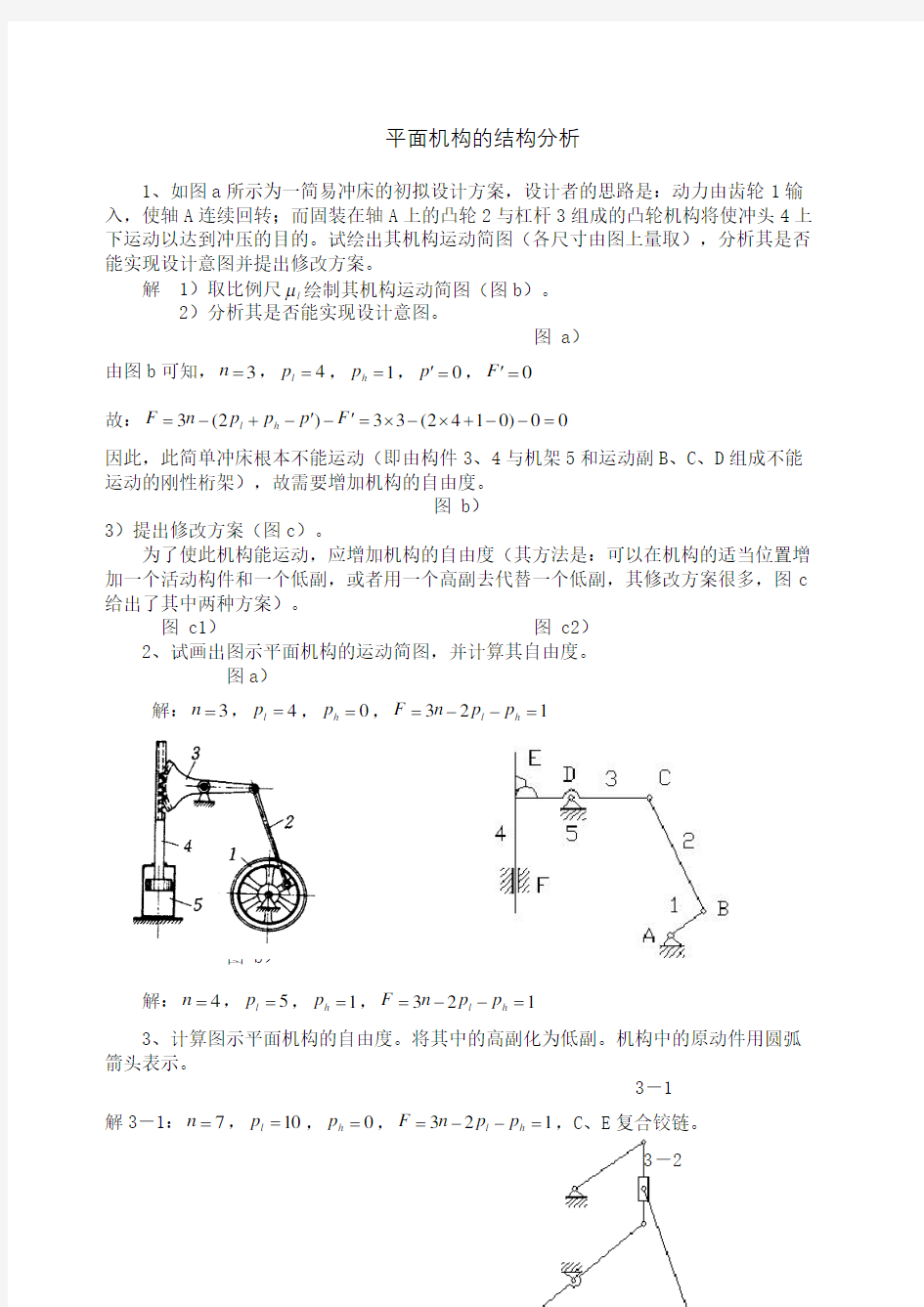
1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。 2)分析其是否能实现设计意图。
图 a ) 由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+?-?='-'-+-=F p p p n F h l
因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
图 b )
3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案)。
图 c1) 图 c2)
2、试画出图示平面机构的运动简图,并计算其自由度。 图a )
解:3=n ,4=l p ,0=h p ,123=--=h l p p n F
图 b )
解:4=n ,5=l p ,1=h p ,123=--=h l p p n F
3、计算图示平面机构的自由度。将其中的高副化为低副。机构中的原动件用圆弧箭头表示。
3-1 解3-1:7=n ,10=l p ,0=h p ,123=--=h l p p n F ,C 、E 复合铰链。 3-2
解3-2:8=n ,11=l p ,1=h p ,123=--=h l p p n F ,局部自由度 3-3 解3-3:9=n ,12=l p ,2=h p ,123=--=h l p p n F 4、试计算图示精压机的自由度
解:10=n ,15=l p ,0=h p 解:11=n ,17=l p ,0=h p
(其中E 、D 及H 均为复合铰链) (其中C 、F 、K 均为复合铰链)
5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。又如在该机构中改选EG 为原动件,试问组成此机构的基本杆组是否与前者有所不同。
解1)计算此机构的自由度 2)取构件AB 为原动件时 机构的基本杆组图为
此机构为 Ⅱ 级机构
3)取构件EG 为原动件时 此机构的基本杆组图为
此机构为 Ⅲ 级机构
平面机构的运动分析
1、试求图示各机构在图示位置时全部瞬心的位置(用符号ij P 直接标注在图上)。
2、在图a 所示的四杆机构中,AB l =60mm ,CD l =90mm ,AD l =BC l =120mm ,2ω=10rad/s ,试用瞬心法求:
1)当?= 165时,点C 的速度C v
;
2)当?= 165时,构件3的BC 线上速度最小的一点E 的位置及其速度的大小;
3)当C v
=0 时,?角之值(有两个解)。
解1)以选定的比例尺l μ作机构运动简图(图b )。
b)
2)求C v
,定出瞬心13P 的位置(图b )
因13p 为构件3的绝对速度瞬心,则有:
3)定出构件3的BC 线上速度最小的点E 的位置
因BC 线上速度最小之点必与13P 点的距离最近,故从13P 引BC 线的垂线交于点E ,由图可得:
4)定出C v
=0时机构的两个位置(作于
图C 处),量出
?=6.2262? c)
3、在图示的机构中,设已知各构件的长度AD l =85 mm ,AB l =25mm ,CD l =45mm ,
BC l =70mm ,原动件以等角速度1ω=10rad/s 转动,试用图解法求图示位置时点E 的速度E v 和加速度E a
以及构件2的角速度2ω及角加速度2α。
a) μl =mm
解1)以l μ=mm 作机构运动简图(图a )
2)速度分析 根据速度矢量方程:CB B C v v v
+=
以v μ=(m/s)/mm 作其速度多边形(图b )。 b) a μ=(m/s 2)/mm
(继续完善速度多边形图,并求E v
及2ω)。 根据速度影像原理,作BCE bce ??~,且字母 顺序一致得点e ,由图得: (顺时针) (逆时针)
3)加速度分析 根据加速度矢量方程: 以a μ=(m/s 2)/mm 作加速度多边形(图c )。
(继续完善加速度多边形图,并求E a
及2α)。
根据加速度影像原理,作BCE e c b ?'''?~,且字母顺序一致得点e ',由图得:
)/(6.1907.0/5.2705.0/22
2s rad l C n l a a BC a BC t
CB =?=''?==μ(逆时针) 4、在图示的摇块机构中,已知AB l =30mm ,AC l =100mm ,BD l =50mm ,DE l =40mm ,曲柄以1ω=10rad/s 等角速度回转,试用图解法求机构在1?= 45时,点D 和点E 的速度和加速度,以及构件2的角速度和角加速度。
解1)以l μ=mm 作机构运动简图(图a )。 2)速度分析v μ=(m/s)/mm 选C 点为重合点,有:
以v μ作速度多边形(图b )再根据速度影像原理, 作BC BD bC bd =2,BDE bde ??~,求得点d 及e , 由图可得
)/(2122.0/5.48005.012s rad l bc w BC v =?==μ(顺时针)
3)加速度分析a μ=(m/s 2)/mm 根据
其中:49.0122.022
222=?==BC n B C l w a
以a μ作加速度多边形(图c ),由图可得:
)/(36.8122.0/5.2504.0122.0//2
2222s rad C n l a a a CB t B C =?=''==μ(顺时针)
5、在图示的齿轮-连杆组合机构中,MM 为固定齿条,齿轮3的齿数为齿轮4的2倍,设
已知原动件1以等角速度1ω顺时针方向回转,试以图解法求机构在图示位置时,E 点的
速度E v
及齿轮3、4的速度影像。
解1)以l μ作机构运动简图(图a ) 2)速度分析(图b )
此齿轮-连杆机构可看作为ABCD 及DCEF 两
个机构串连而成,则可写出
取v μ作其速度多边形于图b 处,由图得
取齿轮3与齿轮4啮合点为K ,根据速度影像原来,在速度图图b 中,作DCK dck ??~求出k 点,然后分别以c 、e 为圆心,以ck 、ek 为半径作圆得圆3g 及圆4g 。 求得pe v v E ?=μ 齿轮3的速度影像是3g 齿轮4的速度影像是4g
6、在图示的机构中,已知原动件1以等速度1ω=10rad/s 逆时针方向转动,
AB l =100mm ,BC l =300mm ,e =30mm 。当1?= 50、 220时,试用矢量方程解析法求构件2
的角位移2θ及角速度2ω、角加速度2α和构件3的速度3v 和加速度3α
。
解
取坐标系xAy ,并标出各杆矢量及方位角如图所示: 1)位置分析 机构矢量封闭方程
分别用i 和j 点积上式两端,有
)(sin sin cos cos 221132
211b e l l s l l ?
??
=+=+θ?θ?
故得:]/)sin arcsin[(2112l l e ?θ-=
2)速度分析 式a 对时间一次求导,得 )(3222111d i
v e w l e w l t t
=+
上式两端用j
点积,求得:)(cos /cos 2
21112e l w l w θ?-=
式d )用2e
点积,消去2w ,求得 )(cos /)sin(2
21113f w l v θθ?--=
3)加速度分析 将式(d )对时间t 求一次导,得: 用j
点积上式的两端,求得:
用2e
点积(g ),可求得:
-
-
7、在图示双滑块机构中,两导路互相垂直,滑块1为主动件,其速度为100mm/s ,方向向右,AB l =500mm ,图示位置时A x =250mm 。求构件2的角速度和构件2中点C 的速度C v
的大小和方向。
解:取坐标系oxy 并标出各杆矢量如图所示。 1)位置分析 机构矢量封闭方程为: 2)速度分析
222222cos 2
sin 2sin 2???w l
y
w l
v w l x
AB C AB A AB C -=-== 当s mm v A /100=,s mm x C /50= ?=1202? ,s rad w /2309.02=(逆时针) s m y
C /86.28= , s mm y x v C C C /74.572
2=+= 像右下方偏?30。
8、在图示机构中,已知1?= 45,1ω=100rad/s ,方向为逆时针方向,AB l =40mm ,
γ= 60。求构件2的角速度和构件3的速度。
解,建立坐标系Axy ,并标示出各杆矢量如图所示: 1.位置分析 机构矢量封闭方程 2.速度分析 消去DB l ,求导,02=w
平面连杆机构及其设计
1、在图示铰链四杆机构中,已知:BC l =50mm ,CD l =35mm ,AD l =30mm ,AD 为机架, 1)若此机构为曲柄摇杆机构,且AB 为曲柄,求AB l 的最大值; 2)若此机构为双曲柄机构,求AB l 的范围; 3)若此机构为双摇杆机构,求AB l 的范围。 解:1)AB 为最短杆
2)AD 为最短杆,若BC AB l l ≤
若BC AB l l ≥ CD BC AB AD l l l l +≤+ 3) AB l 为最短杆
AD CD BC AB l l l l +>+,mm l AB 15>
AB l 为最短杆 CD BC AB AD l l l l +>+ mm l AB 55> 由四杆装配条件 mm l l l l CD BC AD AB 115=++<
2、在图示的铰链四杆机构中,各杆的长度为a=28mm ,b=52mm ,c=50mm ,d=72mm 。试问此为何种机构请用作图法求出此机构的极位夹角θ,杆CD 的最大摆角?,机构的最小传动角min γ和行程速度比系数K 。
解1)作出机构的两个 极位,由图中量得 2)求行程速比系数 3)作出此机构传动 角最小的位置,量得 此机构为 曲柄摇杆机构
3、现欲设计一铰链四杆机构,已知其摇杆CD 的长CD l =75mm ,行程速比系数K =,机架AD 的长度为AD l =100mm ,又知摇杆的一个极限位置与机架间的夹角为ψ=45○,试求其曲柄的长度AB l 和连杆的长BC l 。(有两个解)
解:先计算?=-?+?=36.16180180K K
θ
并取l μ作图,可得两个解
4、如图所示为一已知的曲柄摇杆机构,现要求用一连杆将摇杆CD 和滑块连接起来,使摇杆的三个已知位置D C 1、D C 2、D C 3和滑块的三个位置1F 、2F 、3F 相对应(图示尺寸系按比例尺绘出),试以作图法确定此连杆的长度及其与摇杆CD 铰接点E 的位置。(作图求解时,应保留全部作图线 。l μ=5mm/mm )。
解
(转至位置2作图)
故mm F E l l EF 13026522=?==μ
5、图a 所示为一铰链四杆机构,其连杆上一点E 的三个位置E 1、E 2、E 3位于给定直线上。现指定E 1、E 2、E 3和固定铰链中心A 、D 的位置如图b 所示,并指定长度CD l =95mm ,EC l =70mm 。用作图法设计这一机构,并简要说明设计的方法和步骤。
解:以D 为圆心,CD l 为半径作弧,分别以1E ,2E ,3E 为圆心,EC l 为半径交弧
1C ,2C ,3C ,1DC ,2DC ,3DC 代表点E 在1,2,3位置时占据的位置,
2ADC 使D 反转12?,12C C →,得2DA 3ADC 使D 反转13?,13C C →,得3DA
CD 作为机架,DA 、CE 连架杆,按已知两连架杆对立三个位置确定B 。
凸轮机构及其设计
1、在直动推杆盘形凸轮机构中,已知凸轮的推程运动角0δ=π/2,推杆的行程h =50mm 。试求:当凸轮的角速度ω=10rad/s 时,等速、等加等减速、余弦加速度和正弦加速度四种常用运动规律的速度最大值m ax v 和加速度最大值m ax a 及所对应的凸轮转角δ。
解
2、已知一偏置尖顶推杆盘形凸轮机构如图所示,试用作图法求其推杆的位移曲线。
解 以同一比例尺l μ=1mm/mm 作推杆的位移线图如下所示
3、试以作图法设计一偏置直动滚子推杆盘形凸轮机构的凸轮轮廓曲线。已知凸轮以等角速度逆时针回转,偏距e =10mm ,从动件方向偏置系数δ=-1,基圆半径
0r =30mm ,滚子半径r r =10mm 。推杆运动规律为:凸轮转角?=0○~150○,推杆等速上升16mm ;?=150○~180○,推杆远休;? =180○~300○ 时,推杆等加速等减速回程16mm; ?=300○~360○时,推杆近休。
解 推杆在推程段及回程段运动规律的位移方程为: 1)推程:0/δδh s = ,)1500(?≤≤?δ
2)回程:等加速段20
2/2δδ'-=h h s ,)600(?≤≤?δ 等减速段2020
/)(2δδδ'-'=h s ,)12060(?≤≤?δ 取l μ=1mm/mm 作图如下:
OA =55mm ,0r =25mm ,AB l =50mm ,r r =8mm 。凸轮逆时针方向等速转动,要求当凸轮转过180o 时,推杆以余弦加速度运动向上摆动m ψ=25○;转过一周中的其余角度时,推杆以正弦加速度运动摆回到原位置。
解 摆动推杆在推程及回程中的角位移方程为 1)推程:2/)]/cos(1[0δπδ??-=m ,)1800(?≤≤?δ
2)回程:]2/)/2sin()/(1[00
πδπδδδ??'+'-=m ,)1800(?≤
≤?δ 取l μ=1mm/mm 作图如下: 5、在图示两个凸轮机构中,凸轮均为偏心轮,转向如图。已知参数为R =30mm, OA l =10mm, e =15mm,T r =5mm,OB l =50mm,BC l =40mm 。E 、F 为凸轮与滚子的两个接触点,试在图上标出:
1)从E 点接触到F 点接触凸轮所转过的角度?; 2)F 点接触时的从动件压力角F ε;
3)由E 点接触到F 点接触从动件的位移s (图a )和ψ(图b )。 4)画出凸轮理论轮廓曲线,并求基圆半径0r ;
5)找出出现最大压力角m ax α的机构位置,并标出m ax α。
齿轮机构及其设计
1、设有一渐开线标准齿轮z =20,m =8mm,α=20o,*
a h =1,试求:1)其齿廓曲线在分度圆及齿顶圆上的曲率半径ρ、a ρ 及齿顶圆压力角a α;2)齿顶圆齿厚a s 及基圆齿厚
b s ;3)若齿顶变尖(a s =0)时,齿顶圆半径a r '又应为多少
解1)求ρ、a ρ、a α
2)求 a s 、b s 3)求当a s =0时a r '
由渐开线函数表查得:5.2835'?='a
a 2、试问渐开线标准齿轮的齿根圆与基圆重合时,其齿数z '应为多少,又当齿数大
于以上求得的齿数时,基圆与齿根圆哪个大
解
由b f d d ≥有
当齿根圆与基圆重合时,45.41='z 当42≥z 时,根圆大于基圆。
3、一个标准直齿圆柱齿轮的模数m =5mm ,压力角α=20o ,齿数z =18。如图所示,设将直径相同的两圆棒分别放在该轮直径方向相对的齿槽中,圆棒与两侧齿廓正好切于分度圆上,试求1)圆棒的半径p r ;2)两圆棒外顶点之间的距离(即棒跨距)l 。
解:)(22/2/21rad z
mz m KOP π
π=?=∠
4、有一对渐开线标准直齿圆柱齿轮啮合,已知=1z 19,=2z 42,=m =5mm 。 1)试求当='α20°时,这对齿轮的实际啮合线B 1B 2的长、作用弧、作用角及重合度;2)绘出一对齿和两对齿的啮合区图(选适当的长度比例尺仿课本上图5-19作图,不用画出啮合齿廓),并按图上尺寸计算重合度。 解:1)求21B B 及a ε
2)如图示
5、已知一对外啮合变位齿轮传动,21z z ==12,m =10mm,α=20○, *
a h =1,a '=130mm,试设计这对齿轮传动,并验算重合度及齿顶厚(a s 应大于,取21x x =)。
解 1)确定传动类型 故此传动应为 正 传动。
2)确定两轮变位系数
取294.017/)1217(1/)(6245.0min min *
min 21=-?=-=≥===z z z h x x x x a
3)
4故可用。
6、现利用一齿条型刀具(齿条插刀或齿轮滚刀)按范成法加工渐开线齿轮,齿条
刀具的基本参数为:m =4mm, α=20○, *
a h =1, *c =, 又设刀具移动的速度为V 刀=s ,试就下表所列几种加工情况,求出表列各个项目的值,并表明刀具分度线与轮坯的相对
7、图示回归轮系中,已知z 1=20, z 2=48, 2,1m =2mm, z 3=18, z 4=36, 4,3m =;各轮
的压力角α=20○, *
a h =1, *c =。试问有几种传动方案可供选择哪一种方案较合理
解:mm z z m
a 68)(2
211212=+=
3412
a a '=',
3421>+z z ,3443>+z z
○
1 1,2标准(等变位) 3,4正传动 ○
2 3,4标准(等变位) 1,2正传动 ○
3 1,2和3,4正传动,2143x x x x +>+ ○
4 1,2和3,4负传动,4321x x x x +>+
○
5 1,2负传动,3,4负传动 方案○1,○3较佳
8、在某牛头刨床中,有一对外啮合渐开线直齿圆柱齿轮传动。已知:Z 1=17,
Z 2=118, m=5mm, α=20○, *
a h =1, *c =, a ,=。现已发现小齿轮严重磨损,拟将其报废,大齿轮磨损较轻(沿齿厚方向两侧总的磨损量为),拟修复使用,并要求新设计小齿轮的齿顶厚尽可能大些,问应如何设计这一对齿轮
解1)确定传动类型
mm z z m a 5.337)11817(25
)(221=+=+=,因a a ='故应采用等移距变位传动
2)确定变位系数 故206.01=x ,206.02-=x 3
912n n an =1, *
n c =, B=30mm, 并初取β=15○,试求该传动的中心距a(a 值应圆整为个位数为0或5,并相应重算螺旋角β )、几何尺寸、当量齿数和重合度。
解1)计算中心距a
初取?=15β,则466.24815cos 2)
4020(8)(cos 221=?
+=+=
z z m a n β 取mm a 250=,则735116250
2)
4020(8arccos 2)(arccos 21'''?=?+=+=a z z m n β
3)计算重合度γ
ε
10、设计一铣床进给系统中带动工作台转动的阿基米德蜗杆传动。要求i 12=, m=5mm,
α=20○, *
a h =1, *c =, 求蜗轮蜗杆传动的基本参数(z 1、z 2、q 、γ1、β2)、几何尺寸(d 1、d 2、d a1、d a2)和中心距a 。
解1)确定基本参数 选取z 1=2(因为当5.30~5.1412=i 时,一般推荐21=z 。) 查表确定mm d 501=,计算105/50/1===m d q
2)计算几何尺寸
mm d 501=, mm mz d 20522==
3)中心距a=
11、在图示的各蜗轮蜗杆传动中,蜗杆均为主动,试确定图示蜗杆、蜗轮的转向或螺旋线的旋向。
轮系及其设计
1、如图所示为一手摇提升装置,其中各轮齿数均已知,试求传动比i 15, 指出当提升重物时手柄的转向(在图中用箭头标出)。
解 此轮系为 空间定轴轮系
2、在图示输送带的行星减速器中,已知:z 1=10, z 2=32, z 3=74, z 4=72, z 2,=30 及电动机的转速为1450r/min ,求输出轴的转速n 4。
解:1-2-3-H 行星轮系; 3-2-2’-4-H 行星轮系; 1-2―2’-4-H 差动轮系; 这两个轮系是独立的
m in /29.64r n = 与1n 转向相同。
3、图示为纺织机中的差动轮系,设z 1=30, z 2=25, z 3=z 4=24, z 5=18, z 6=121, n 1=48~200r/min, n H =316r/min, 求n 6=
解 此差动轮系的转化轮系的传动比为: 当)m in (200~481r n =时,则:
6n 转向与1n 及H n 转向相同。
4、图示为建筑用铰车的行星齿轮减速器。已知:z 1=z 3=17, z 2=z 4=39, z 5=18, z 7=152,n 1=1450r/min 。当制动器B 制动,A 放松时,鼓轮H 回转(当制动器B 放松、A 制动时,鼓轮H 静止,齿轮7空转),求n H = 解:当制动器B 制动时,A 放松时,整个轮系
为一行星轮系,轮7为固定中心轮,鼓轮H 为系杆,此行星轮系传动比为:
H n 与1n 转向相同。
5、如图所示为一装配用电动螺丝刀齿轮减速部分的传动简图。已知各轮齿数为z 1=z 4=7,z 3=z 6=39, n 1=3000r/min,试求螺丝刀的转速。 解:此轮系为一个复合轮系, 在1-2-3-H 1行星轮系中: 在4-5-6-H 2行星轮系中
18.43)739
1(2411212=+=?=H H H i i i ,
故)min (5.6918.4330002211r i n n H H ===,其转向与1n 转向相同。
6、在图示的复合轮系中,设已知n 1=3549r/min ,又各轮齿数为z 1=36, z 2=60, z 3=23,z 4=49, z 4,=69, z 5=31, z 6=131, z 7=94, z 8=36, z 9=167,试求行星架H 的转速n H (大小及转向)
解:此轮系是一个复合轮系 在1-2(3)-4定轴轮系中 551.323
3649
60314214=??==Z Z Z Z i (转向见图) 在4’-5-6-7行星轮系中 在7-8-9-H 行星轮系中
故m in)/(15.124587.28/354911r n n H H ===,其转向与轮4转向相同
7、在图示的轮系中,设各轮的模数均相同,且为标准传动,若已知其齿数z 1=z 2,
=z 3,=z 6,=20, z 2=z 4=z 6=z 7=40, 试问:
1)当把齿轮1作为原动件时,该机构是 否具有确定的运动
2)齿轮3、5的齿数应如何确定
3) 当齿轮1的转速n 1=980r/min 时,齿 轮3及齿轮5的运动情况各如何
解 1、计算机构自由度
7=n ,71=p ,8=h p ,2='p ,0='F 。 ()6(6'及7引入虚约束,结构重复)
因此机构(有、无)确定的相对运动(删去不需要的)。
2、确定齿数
根据同轴条件,可得: 802040202213=++=++='Z Z Z Z
3、计算齿轮3、5的转速
1)图示轮系为 封闭式 轮系,在作运动分析时应划分为如下 两 部分来计算。 2)在 1-2(2’)-3-5 差动 轮系中,有如下计算式
820
2080
4021325351513-=??-=-=--=
'Z Z Z Z n n n n i (a) 3)在 3’-4-5 定轴 轮系中,有如下计算式
520
100
355353-=-=-==
'Z Z n n i (b ) 4)联立式 (a )及(b ) ,得
故3n = -100(r/min ) ,与1n 反 向; 5n = 20(r/min ) ,与1n 同 向。
其他常用机构
1、图示为微调的螺旋机构,构件1与机架3组成螺旋副A ,其导程p A =,右旋。构
件2与机架3组成移动副C ,2与1还组成螺旋副B 。现要求当构件1转一圈时,构件2向右移动,问螺旋副B 的导程p B 为多少右旋还是左旋 解:
mm P B 3= 右旋
2、某自动机床的工作台要求有六个工位,转台停歇时进行工艺动作,其中最长的一个工序为30秒钟。现拟采用一槽轮机构来完成间歇转位工作。设已知槽轮机构的中心距L=300mm ,圆销半径r=25mm ,槽轮齿顶厚b=,试绘出其机构简图,并计算槽轮机构主动轮的转速。
解 1)根据题设工作需要应采用 单 销 六 槽的槽轮机构。 2)计算槽轮机构的几何尺寸,并以比例尺μL 作其机构简图如图。 拨盘圆销转臂的臂长 mm Z
L R 1506
sin
300sin
===π
π
槽轮的外径 mm Z
L S 81.2596
cos
300cos ===π
π
槽深 mm Z Z L h 13525)16
cos
6(sin
300)1cos
(sin
=+-+=+-+≥π
πγπ
π
锁止弧半径 mm b r R r 5.1125.1225150=--=--='
3)计算拨盘的转速
设当拨盘转一周时,槽轮的运动时间为t d ,静止时间为t j 静止的时间应取为 t j =30 s 。
本槽轮机构的运动系数 k=(Z-2)/2Z=1/3 停歇系数k ,=1-k=t j /t,由此可得拨盘转一周所需时间为 故拨盘的转速
机械运动方案的拟定
1、试分析下列机构的组合方式,并画出其组合方式框图。如果是组合机构,请同时说明。
2、在图示的齿轮-连杆组合机构中,齿轮a 与曲柄1固联,齿轮b 和c 分别活套在轴C 和D 上,试证明齿轮c 的角速度ωc 与曲柄1、连杆2、摇杆3的角速度ω1、ω2、ω3 之间的关系为
ωc =ω3(r b +r c )/r c -ω2(r a +r b )/r c +ω1r a /r c
证明:
1)由c-b-3组成的行星轮系中有
得)(3a w r r
w r r r w b c
b c c b c -+=
2)由a-b-2组成的行星轮系中有 得)(1
2b w r r
w r r r w b
a b a b b -+=
3)联立式(a )、(b)可得
平面机构的力分析
1、在图示的曲柄滑块机构中,设已知AB l =,BC l =,n 1=1500r/min (为常数),活塞及
其附件的重量Q 1=21N ,连杆重量Q 2=25N, 2c J =, 连杆质心c 2至曲柄销B 的距离2Bc l =BC l /3。试确定在图示位置的活塞的惯性力以及连杆的总惯性力。
解 1)以l μ作机构运动简图(图a )
2)运动分析,以v μ和a μ作其速度图(图b )及加速图(图c )。由图c 得
)/(500033
.0227522s rad l c n l a a BC a BC t CB =?=''==μ(逆时针)
3)确定惯性力 活塞3:180081
.921
333?==
=c c I a g Q a m P )(2.3853N =
连杆2:5.212281
.925222?==
c I a g Q P )(5409N = 50000425.0222?==c c I a J M )(5.212Nm =(顺时针)
连杆总惯性力:22I I P P =' )(5409N =
(将3I P 及2I P
'示于图a 上)
2、图示为一曲柄滑块机构的三个位置,P 为作用在活塞上的力,转动副A 及B 上所画的虚线小圆为摩擦圆,试决定在此三个位置时,作用在连杆AB 上的作用力的真实方向(各构件的重量及惯性力略去不计)。
解 1)判断连杆2承受拉力还是压力(如图); 2)确定ω21、ω23的方向(如图);
3)判断总反力应切于A 、B 处摩擦圆的上方还是下方(如图); 4)作出总反力(如图)。
3、图示为一摆动推杆盘形凸轮机构,凸轮1沿逆时针方向回转,Q 为作用在推杆2上的外载荷,试确定各运动副中总反力(R 31、R 12、R 32)的方位(不考虑构件的重量及惯性力,图中虚线小圆为摩擦圆,运动副B 处摩擦角为φ=10○)。 解
4、在图示楔块机构中,已知:γ=β=60○,Q=1000N, 各接触面摩擦系数f=。如Q 为有效阻力,试求所需的驱动力F 。
解:设2有向右运动的趋势,相对运动方向 如图所示,分别取1,2对象: 作力的多边形,由图可得:
机械的平衡
1、在图a 所示的盘形转子中,有四个偏心质量位于同一回转平面内,其大小及回转半径分别为m 1=5kg ,m 2=7kg ,m 3=8kg ,m 4=10kg ,r 1=r 4=10cm ,r 2=20cm ,r 3=15cm ,方位如图a 所示。又设平衡质量m b 的回转半径r b =15cm 。试求平衡质量m b 的大小及方位。
解 根据静平衡条件有 以w μ作质径积多边形图b ,故得
2、在图a 所示的转子中,已知各偏心质量m 1=10kg,m 2=15kg,m 3=20kg,m 4=10kg,它们的回转半径分别为r 1=40cm,r 2=r 4=30cm,r 3=20cm,又知各偏心质量所在的回转平面间的距离为l 12=l 23=l 34=30cm,各偏心质量的方位角如图。若置于平衡基面I 及II 中的平衡质量m b1及m b Ⅱ的回转半径均为50cm ,试求m b Ⅰ及m b Ⅱ的大小和方
位。
解 根据动平衡条件有 以w μ作质径积多边形图b 和图c ,由图得 平衡基面I
平衡基面П
机器的机械效率
1、图示为一带式运输机,由电动机1经带传动及一个两级齿轮减速器,带动运输带8。设已知运输带8所需的曳引力P=5500N ,运送速度u=s 。带传动(包括轴承)的效率η1=,每对齿轮(包括其轴承)的效率η2=,运输带8的机械效率η3=。试求该系统的总效率及电动机所需的功率。
解 该系统的总效率为 电动机所需的功率为
2、图示为一焊接用的楔形夹具,利用这个夹具把两块要焊接的工件1及1’预先夹妥,以便焊接。图中2为夹具体,3为楔块,试确定此夹具的自锁条件(即当夹紧后,楔块3不会自动松脱出来的条件)。
解:此自锁条件可以根据得0≤'η的条件来确定。 取楔块3为分离体,其反行程所受各总反力的方向如图所示。根据其力平衡条件作力多边形,由此可得: 且αsin )(023P R '= 则反行程的效率为
?α?αηcos sin )2sin()(23023-=='R R
令0≤'η,0)2sin(≤-?α,即当02≤-?α时,此夹具处于自锁状态。 故此楔形夹具的自锁条件为:02≤-?α
3、在图a 所示的缓冲器中,若已知各楔块接触面间的摩擦系数f 及弹簧的压力Q ,试求当楔块2、3被等速推开及等速恢复原位时力P 的大小,该机构的效率以及此缓冲器正、反行程均不至发生自锁的条件。
解 1、缓冲器在P 力作用下楔块 2、3被等速推开(正行程)
1)确定各楔块间的相对运动方向 (如图a );
2)确定各楔块间的总反力的方向; 3)分别取楔块2、1为分离体,有 如下两矢量式
4)作力多边形(图b ),由图可得 令η≤0得自锁条件为?α≤, 故不自锁条件为?α>。
2、缓冲器在Q 力作用下楔块2、3 等速恢复原位(反行程)。
利用正反行程时力P 和P ’以及效率 η与η,之间的关系,可直接得 令η,≤0得自锁条件为?≥+90?α,