
第二章I/O端口地址译码技术作业
1、I什么是/O端口?
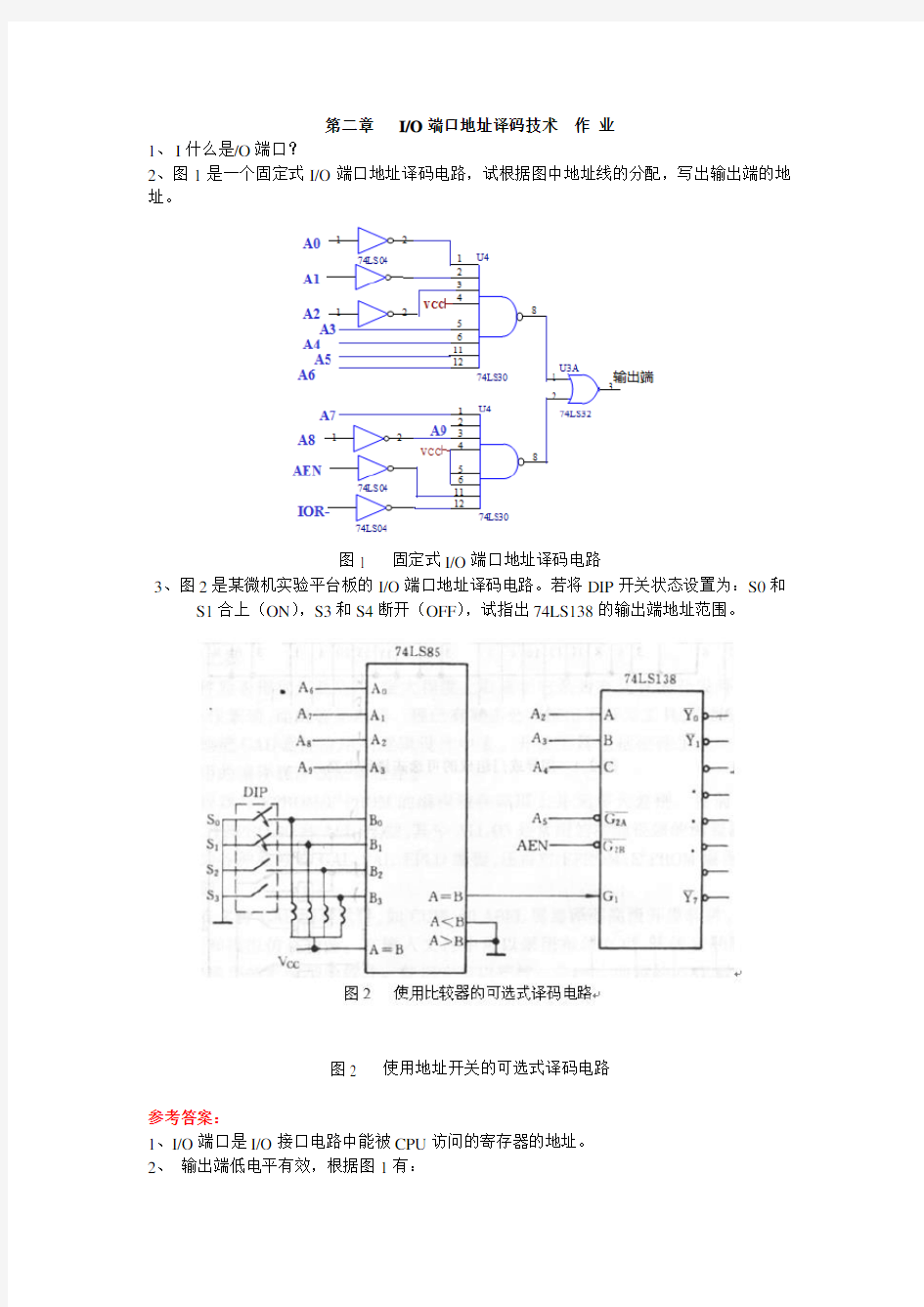
2、图1是一个固定式I/O端口地址译码电路,试根据图中地址线的分配,写出输出端的地址。
图1 固定式I/O端口地址译码电路
3、图2是某微机实验平台板的I/O端口地址译码电路。若将DIP开关状态设置为:S0和
S1合上(ON),S3和S4断开(OFF),试指出74LS138的输出端地址范围。
图2 使用地址开关的可选式译码电路
参考答案:
1、I/O端口是I/O接口电路中能被CPU访问的寄存器的地址。
2、输出端低电平有效,根据图1有:
地址线0 0 A9 A8 A7 A6 A5 A4 A3 A2 A1 A0
二进制 1 0 1 1 1 1 1 0 0 0
十六进制 2 F 8
所以,输出端的地址:2F8H
3、从图2可以看出,当S0断开时,其值为1(高电平),A6必须为0,对应的异或门输出才会是1;同样,当S1合上时,其值为0(高电平),A7必须为1,对应的异或门输出才会是1;类推,S2合上,S3断开时,A8,A9必须为1,0。即当S2和S1合上,S3和S0断开时,译码电路输入地址线的值
地址线0 0 A9 A8 A7 A6 A5 A4 A3 A2 A1 A0 二进制0 1 1 0 片选片内端口寻址十六进制0 ~7 H 0 ~7H
所以,
CS0地址为:180H~187H 共8个端口地址。
CS1地址为:188H~18FH 共8个端口地址。
CS2地址为:190H~197H 共8个端口地址。
CS3地址为:198H~19FH 共8个端口地址。
CS4地址为:1A0H~1A7H 共8个端口地址。
CS5地址为:1A8H~1AFH 共8个端口地址。
CS6地址为:1B0H~1B7H 共8个端口地址。
CS7地址为:1B8H~1BFH 共8个端口地址。
1>指令:CPU 根据人的意图来执行某种操作的命令 指令系统:一台计算机所能执行的全部指令集合 机器语言:用二进制编码表示,计算机能直接识别和执行的语言 汇编语言:用助记符、符号和数字来表示指令的程序语言 高级语言:独立于机器的,在编程时不需要对机器结构及其指令系统有深入 了解的通用性语言 2、 见第1题 3、 操作码[目的操作数][,源操作数] 4、 寻址方式 寻址牢间 立即数寻址 程序存储器ROM 直接寻址 片内RAM 低128B 、特殊功能寄存器 寄存器寻址 工作寄存器R0 R7、A 、B 、C 、DPTR 寄存器间接寻址 片内RAM 低128B 、片外RAM 变址寻址 程序存储器(@A+PC,@A+DPTR ) 相对寻址 程序存储器256B 范围(PC+偏移量) 位寻址 片内RAM 的20H-2FH 字节地址、部分SFR 5、SFR :直接寻址,位寻址,寄存器寻址;片外RAM :寄存器间接寻址 A, 40H ;直接寻址 (40H ) A RO, A ;寄存器寻址 (A ) - RO Pl, #0F0H ;立即数寻址 0F0—P1 A, @R0 ;寄存器间接寻址((RO )) - A P2, Pl ;直接寻址(Pl ) ->P2 最后结果:(RO) =38H, (A) =40H, (PO) =38H, (Pl) = (P2) =0F0H, (DPTR) =3848H, (18H) =30H, OOH) =38H, (38H) =40H, (40H) =40H, (48H) =38H 注意:?左边是内容,右边是单元 7、 用直接寻址,位寻址,寄存器寻址 8、 MOV A,DATA ;直接寻址2字节1周期 MOV A,#DATA ;立即数寻址 2字节1周期 6、MOV MOV MOV MOV MOV MOV MOV MOV MOV @R0,30H ;直接寻址(3UH ) (RO ) DPTR,#3848 ;立即数寻址 3848—DPTR 40H,38H ;直接寻址(38H ) ->40H R0,30H ;直接寻址(30H ) ->R0 P0,R0 ;寄存器寻址 (RO ) PO 18H, #30H ;立即数寻址 30->18H MOV MOV
第五章电感式传感器 思考题: 1、说明变气隙型电感传感器、差动变压器式传感器和涡流传感器的主要组成、工作原理和基本特性。 答: a)变气隙型电感传感器主要由线圈、铁心、衔铁三部分组成的。线圈是套在铁心上的,在铁心与衔铁之间有一个空气隙,空气隙厚度为δ。传感器的运动部分与衔铁相连。当外部作用力作用在传感器的运动部分时,衔铁将产生位移,使空气隙δ发生变化,磁路磁阻R m发生变化,从而引起线圈电感的变化。线圈电感L的变化与空气隙δ的变化相对应,这样只要测出线圈的电感就能判定空气隙的大小,也就是衔铁的位移。 b)差动变压器式传感器主要由铁心、衔铁和线圈组成。线圈又分为初级线圈(也称激励线圈)和次级线圈(也称输出线圈)。上下两个铁心及初级、次级线圈是对称的。衔铁位于两个铁心中间。上下两个初级线圈串联后接交流激磁电压1,两个次级线圈按电势反相串联。它的优点是灵敏度高,一般用于测量几微米至几百微米的机械位移。缺点是示值范围小,非线性严重。 c)涡流传感器的结构很简单,有一个扁平线圈固定在框架上构成。线圈用高强度漆包线或银线绕制而成,用粘合剂站在框架端部,也可以在框架上开一条槽,将导线绕在槽内形成一个线圈。涡流传感器的工作原理是涡流效应,当一块金属导体放置在一变化的磁场中,导体内就会产生感应电流,这种电流像水中漩涡那样在导体内转圈,所以称之为电涡流或涡流。这种现象就称为涡流效应。涡流传感器最大的特点是可以实现非接触式测量,可以测量振动、位移、厚度、转速、温度和硬度等参数,还可以进行无损探伤,并且具有结构简单、频率响应宽、灵敏度高、测量线性范围大、体积小等优点。 2、为什么螺管型电感传感器比变气隙型电感传感器有更大的测位移范围? 答:变气隙型灵敏度高,因为原始气隙δ0一般取得很小(0.1~0.5mm),当气隙变化为△δ=1μm时,电感的相对变化量△L/L0可达0.01~0.002,因而它对处理电路的放大倍数要求低。它的主要缺点是非线性严重,为了减小非线性,量程就必须限制在较小范围内,通常为气隙δ0的1/5以下,同时,这种传感器制造装
第一章课后习题 1.1 把下列十进制数转换成二进制数、八进制数、十六进制数。 ① 16.25 ② 35.75 ③ 123.875 ④ 97/128 1.2 把下列二进制数转换成十进制数。 ① 10101.01 ② 11001.0011 ③ 111.01 ④ 1010.1 1.3 把下列八进制数转换成十进制数和二进制数。 ① 756.07 ② 63.73 ③ 35.6 ④ 323.45 1.4 把下列十六进制数转换成十进制数。 ① A7.8 ② 9AD.BD ③ B7C.8D ④ 1EC 1.5 求下列带符号十进制数的8位补码。 ① +127 ② -1 ③ -0 ④ -128 1.6 求下列带符号十进制数的16位补码。 ① +355 ② -1 1.7 计算机分那几类?各有什么特点? 1.8 简述微处理器、微计算机及微计算机系统三个术语的内涵。 1.9 80X86微处理器有几代?各代的名称是什么? 1.10 你知道现在的微型机可以配备哪些外部设备? 1.11 微型机的运算速度与CPU的工作频率有关吗? 1.12 字长与计算机的什么性能有关? 习题一参考答案 1.1 ① 16.25D=10000.01B=20.2Q=10.4H ② 35.75D=100011.11B=43.6Q=23.CH ③ 123.875D=1111011.111B=173.7Q=7B.EH ④ 97/128D=64/123+32/128+1/128=0.1100001B=0.604Q=0.C2H 1.2 ① 10101.01B=21.25D ② 11001.0011B=25.1875D ③ 111.01B=7.25D ④ 1010.1B=10.5D 1.3 ① 756.07Q=111101110.000111B=494.109D ② 63.73Q=110011.111011B=51.922D ③ 35.6Q=11101.110B=29.75D ④ 323.45Q=11010011.100101B=211.578D 1.4 ① A7.8H=167.5D ② 9AD.BDH=2477.738D ③ B7C.8D=2940.551D ④ 1ECH=492D 1.5 ① [+127] 补=01111111 ② [-1] 补 = 11111111 ③ [-0] 补=00000000 ④[-128] 补 =10000000 1.6 ① [+355] 补= 00011 ② [-1] 补 = 1111 1111 1111 1111 1.7 答:传统上分为三类:大型主机、小型机、微型机。大型主机一般为高性能的并行处理系统,存储容量大,事物处理能力强,可为众多用户提供服务。小型机具有一定的数据处理能力,提供一定用户规模的信息服务,作为部门的信息服务中心。微型机一般指在办公室或家庭的桌面或可移动的计算系统,体积小、价格低、具有工业化标准体系结构,兼容性好。 1.8 答:微处理器是微计算机系统的核心硬件部件,对系统的性能起决定性的影响。微计算机包括微处理器、存储器、I/O接口电路及系统总线。微计算机系统是在微计算机的基础上配上相应的外部设备和各种软件,形成一个完整的、独立的信息处理系统。 1.9 答:从体系结构上可分为5代:4004:4位机;8080/8085:8位机;8086/8088/80286:16位机;80386/80486:32位机;Pentium系列机:64位。 第二章课后习题 2.1、EU与BIU各自的功能是什么?如何协同工作? 2.2、8086/8088微处理器内部有那些寄存器,它们的主要作用是什么? 2.3、8086对存储器的管理为什么采用分段的办法?
“微机系统原理与接口技术”第九章习题解答(部分) 1. 什么是并行接口和串行接口?它们各有什么作用? 答:并行接口是指接口与外设之间按字长传送数据的接口,即4位、8位或16位二进制位同时传送;而串行接口是指接口与外设之间依时间先后逐位传送数据的接口,即一个时刻只传送一个二进制位。 并行接口传送速度较快,但在远距离传送数据时成本高,损耗大,且平行数据线之间干扰大,所以并行接口一般适用于近距离的高速传送,而串行接口则适用于远距离传送。 2. 试画出8255A与8086CPU连接图,并说明8255A的A0、A1地址线与8086CPU的A1、A2地址线连接的原因。 答:8255A与8086CPU的连线图如下图所示: 题9-2图 8086系统有16根数据线,而8255只有8根数据线,为了软件读写方便,一般将8255的8条数据线与8086的低8位数据线相连。8086在进行数据传送时总是将总线低8位对应偶地址端口,因此8086CPU要求8255的4个端口地址必须为偶地址,即8086在寻址8255时A0脚必须为低。实际使用时,我们总是将8255的A0、A1脚分别接8086的A1、A2脚,而将8086的A0脚空出不接,并使8086访问8255时总是使用偶地址。 4. 简述8255A工作在方式1时,A组端口和B组端口工作在不同状态(输入或输出)时,C端口各位的作用。 答:8255A 的A、B口工作在方式1时,C端口各位的使用情况如下表所示:
注:带*的各中断允许信号由C口内部置位/复位操作设置,非引脚电平。 5. 用8255A控制12位A/D转换器,电路连接如下图所示。设B口工作于方式1输入,C 口上半部输入,A口工作于方式0输入。试编写8255A的初始化程序段和中断服务程序(注:CPU采用中断方式从8255A中读取转换后的数据)。 题9-5图 答:设8255的A、B、C及控制端口的地址分别为PORTA、POA TB、PORTC和PCON,则一种可能的程序段实现如下: 主程序:; 初始化8255A …… MOV AL, 10011110B ; 设置8255A的工作方式控制字 OUT PCON, AL MOV AL, 00000101B ; 设置C口置位/复位控制字,使INTEA(PC2)为 OUT PCON, AL ; 高电平,允许B口中断 MOV AL, 00000010B ; 设置C口置位/复位控制字,使PC1(IBF B)输出 OUT PCON, AL ; 低电平,启动第一次A/D转换 …… 中断服务程序:; 取数,并自动启动下一次A/D转换 …… MOV AL, 00000011B ; PC1(IBF B)输出高电平,停止A/D转换 OUT PCON, AL IN AL, PORTC ; 先取高4位转换值 MOV AH, AL MOV CL, 4 SHR AH, CL ; 将高4位转换值放到AH的低端 IN AL, PORTB ; 取低8位转换值放到AL中 MOV AL, 00000010B ; PC1(IBF B)输出低电平,再次启动A/D转换 OUT PCON, AL …… IRET 6. 用8255A作为CPU与打印机接口,8255的A口工作于方式0,输出;C口工作于方式0。8255A与打印机及CPU的连线如下图所示。试编写一程序,用查询方式将100个数据送打印机打印(8255A的端口地址及100个数据的存放地址自行设定)。
第三章作业 3.33.指出8086/8088下列指令中存储器操作数物理地址的计算表达式。 (1) MOV AL,[DI] PA=DS*16+DI (2) MOV AX,[BX +SI] PA=DS*16+BX+SI (3) MOV [BX+DI],AL PA=DS*16+BX+DI (4) ADD AL,ES:[BX] PA=ES*16+BX (5) SUB AX,[2400H] PA=DS*16+2400H (6) ADC AX,[BX+DI+1200H] PA=DS*16+BX+DI+1200H (7) MOV CX,[BP+SI] PA=SS*16+BP+SI (8) INC BYTE PTR[DI] PA=DS*16+DI 3.34指出8086/8088下列指令的错误 (1)MOV [SI],IP 8086不允许将IP的值直接存入内存,改正MOV AX,IP在MOV [SI],AX (2)MOV CS,AX 8086不允许将AX的值直接存入代码段寄存器,代码段不能做目的操作数 (3)MOV BL,SI+2 源、目的字长不一致 (4)MOV 60H,AL 立即数不能做目的操作数 (5)PUSH 2400H PUSH 的源操作数不能是立即数 (6)INC [BX] INC对内存操作时要指明是字节还是字 (7)MUL -60H 立即数不能作为MUL的目的操作数 (8)ADD [2400H],2AH 2AH是字节,而[2400H]是字,不匹配 (9)MOV [BX].[DI] 源,目的不能同时为存储器寻址方式 (10)MOV SI,AL
3.36阅读下列程序段,指出每条指令执行以后有关寄存器的内容 MOV AX,0ABCH AX=0ABCH DEC AX AX=0ABBH AND AX,00FFH AX=00BBH MOV CL,4 CL=04H SAL AL,1 AL=F6F MOV CL,AL CL=F6H ADD CL,78 CL=DDH PUSH AX AX=00F6H POP BX BX=00F6H 3.42某程序段为: 2000H:304CH ABC: MOV AX,1234H . . . 2000H: 307EH JNE ABC 解:JNE ABC占两个字节,所以执行JNE时,IP=3081H 304CH-3081H=-34H=[10110100]源=[11001011]反 =[11001100]补=CCH 3.71设计一个程序段,将DH中的最左三位清零,尾部改变DH中的其它位,结果存入BH中 解:AND DH,1FH MOV BH,DH
第十章光电传感器思考题与习题 1.单项选择题 1)晒太阳取暖利用了________;人造卫星的光电池板利用了________;植物的生长利用了________。 A.光电效应B.光化学效应C.光热效应D.感光效应 2)蓝光的波长比红光________,相同光子数目的蓝光能量比红光________。 A.长B.短C.大D.小 3)光敏二极管属于________,光电池属于________。 A.外光电效应B.内光电效应C.光生伏特效应D.光热效应 4)光敏二极管在测光电路中应处于________偏置状态,而光电池通常处于________偏置状态。 A.正向B.反向C.零 5)光纤通讯中,与出射光纤耦合的光电元件应选用________。 A.光敏电阻B.PIN光敏二极管C.APD光敏二极管D.光敏三极管 6)温度上升,光敏电阻、光敏二极管、光敏三极管的暗电流________。 A.增加B.减小C.不变 7)普通型硅光电池的峰值波长为________,落在________区域。 A.0.8m B.8mm C.0.8μmD.0.8nm D.可见光E.近红外光F.紫外光G.远红外光 8)欲精密测量光的照度,光电池应配接________。 A.电压放大器B.A/D转换器C.电荷放大器D.I/U转换器 9)欲利用光电池为手机充电,需将数片光电池________起来,以提高输出电压,再将几组光电池________起来,以提高输出电流。 A.并联B.串联 C.短路 D.开路 10)欲利用光电池在灯光(约200lx)下驱动液晶计算器(1.5V)工作,设每片光电池的有载输出电压约为0.4V,则必须将______片光电池串联起来才能正常工作。 A.2片 B.3片 C.4片 D.20片 11)光导纤维是利用光的________原理来远距离传输信号的。 A.光的偏振 B.光的干涉 C.光的散射 D.光的全反射 12)光纤通信应采用________作为光纤的光源;光纤水位计可以采用________作为光纤的光源较为经济。 A.白炽灯 B. LED C. LCD D. ILD 13)要测量高压变压器的三相绝缘子是否过热,应选用________;要监视银行大厅的人流,应选用________。 A.热敏电阻B.数码摄像机C.红外热像仪D.热电偶 14)CCD数码相机的像素越高,分辨率就越________,每张照片占据的存储器空间就越________。 A.高 B. 低 C. 大 D. 小 1
解: mov ah,1 ;只允许输入小写字母 int 21h sub al,20h ;转换为大写字母 mov dl,al mov ah,2 int 21h ;显示 解: mov ax, bufX cmp ax, bufY jge done mov ax, bufY done: mov bufZ, ax 解:
.model small .stack .data bufX dw -7 signX db .code .startup cmp bufX,0 ;test bufX,80h jl next ;jnz next mov signX,0 jmp done next: mov signX,-1 done: .exit 0 end 解: mov dl,’2’ mov ax,bufX cmp ax,bufY je next1 dec dl next1: cmp ax,bufZ je next2 dec dl next2: mov ah,2 int 21h
编制程序完成12H、45H、0F3H、6AH、20H、0FEH、90H、0C8H、57H和34H等10个字节数据之和,并将结果存入字节变量SUM中(不考虑溢出和进位)。 ; .model small .stack .data b_data db 12h,45h,0f3h,6ah,20h,0feh,90h,0c8h,57h,34h ;原始数据num equ 10 ;数据个数 sum db ;预留结果单元 .code .startup xor si, si ;位移量清零 xor al, al ;取第一个数 mov cx, num ;累加次数 again: add al, b_data[si] ;累加 inc si ;指向下一个数 loop again ;如未完,继续累加 mov sum, al ;完了,存结果 .exit 0 end 解: lucase proc push bx mov bx,offset string cmp al,0 je case0 cmp al,1
《微机原理与接口技术》 复习题 第1章 1.简述名词的概念:微处理器、微型计算机、微型计算机系统。 答: (1)微处理器:微处理器(Microprocessor)简称μP或MP,或CPU。CPU是采用大规模和超大规模集成电路技术将算术逻辑部件ALU(Arithmetic Logic Unit)、控制部件CU (Control Unit)和寄存器组R(Registers)等三个基本部分以及内部总线集成在一块半导体芯片上构成的电子器件。 (2)微型计算机:微型计算机(Microcomputer)是指以微处理器为核心,配上由大规模集成电路制作的存储器、输入/输出接口电路及系统总线等所组成的计算机,简称微机。 (3)微型计算机系统:微型计算机系统由硬件与软件两大部分组成,分别称为硬件(Hardware)系统与软件(Software)系统。其中,硬件(Hardware)系统由CPU、内存储器、各类I/O接口、相应的I/O设备以及连接各部件的地址总线、数据总线、控制总线等组成。 软件(Software)系统:计算机软件(Software)是指为运行、维护、管理、应用计算机所编制的程序及程序运行所需要的数据文档资料的总和。一般把软件划分为系统软件和应用软件。其中系统软件为计算机使用提供最基本的功能,但是并不针对某一特定应用领域。而应用软件则恰好相反,不同的应用软件根据用户和所服务的领域提供不同的功能。 2.简述名词的概念:指令寄存器、地址寄存器、标志寄存器。 答: (1)指令寄存器:指令寄存器(Instruction Register,IR)用来保存计算机当前正在执行或即将执行的指令。当一条指令被执行时,首先,CPU从内存取出指令的操作码,并存入IR中,以便指令译码器进行译码分析。 (2)地址寄存器:地址寄存器(Address Register,AR)被动地接受IP传送给它的地址值(二进制地址),AR的作用是保持IP送来的地址,并且以并行方式连接输出到CPU的地址引脚上,以便CPU访问指定的内存单元。 (3)标志寄存器:标志寄存器(Flags,F)是CPU中不可缺少的程序状态寄存器,因此,也称程序状态字寄存器(PSW),所谓状态是指算术或逻辑运算后,结果的状态以二进制的0或1在标志寄存器中标识出来,例如,运算结果有进位,则进位标志位CF=1,否则为0。 3.何谓IA-32处理器?
第3章【单片机的指令系统】 思考与练习题解析 【3—1】什么是指令及指令系统? 【答】控制单片机进行某种操作的命令称为“指令”。单片机就是根据指令来指挥和控制 单片机各部分协调工作。指令由二进制代码表示,指令通常包括操作码和操作数两部分:操作码规定操作的类型,操作数给出参加操作的数或存放数的地址。 所有指令的集合称为“指令系统”。80C51单片机的指令系统专用于80C51系列单片机, 是一个具有255种操作码(OOH~FFH,除A5H外)的集合。 【3—2】80C51单片机的指令系统具有哪些特点? 【答】80C51单片机的指令系统容易理解和阅读。只要熟记代表33种功能的42种助记即可。有的功能如数据传送,可以有几种助记符,如MOV、MOVc、MOVX。而指令功能助 记符与操作数各种寻址方式的结合,共构造出111种指令,而同一种指令所对应的操作码可以多至8种(如指令中Rn对应寄存器R0~R7)。 80C51单片机的指令系统具有较强的控制操作类指令,容易实现“面向控制”的功能;具有位操作类指令,有较强的布尔变量处理能力。 【3—3】简述80C51指令的分类和格式。 【答】80C51的指令系统共有111条指令,按其功能可分为5大类:数据传送类指令(28条)、算术运算类指令(24条)、逻辑运算类指令(25条)、控制转移类指令(17条)和布尔操作(位)类指令(17条)。 指令的表示方法称之为“指令格式”,其内容包括指令的长度和指令内部信息的安排等。在80C51系列的指令系统中,有单字节、双字节和三字节等不同长度的指令。 ·单字节指令:指令只有一个字节,操作码和操作数同在一个字节中。 ·双字节指令:包括两个字节。其中一个字节为操作码,另一个字节是操作数。 ·三字节指令:操作码占一个字节,操作数占两个字节。其中操作数既可能是数据,也可能是地址。 【3—4】简述80C51的指令寻址方式,并举例说明。 【答】执行任何一条指令都需要使用操作数,寻址方式就是在指令中给出的寻找操作数或操作数所在地址的方法。 80C5l系列单片机的指令系统中共有以下7种寻址方式。 ①立即寻址。在指令中直接给出操作数。出现在指令中的操作数称为“立即数”,为了与直接寻址指令中的直接地址相区别,在立即数前面必须加上前缀“#”。 例如:MOV DPTR,#1234H ;1234H为立即数,直接送DPTR ②直接寻址。在指令中直接给出操作数单元的地址。 例如:MOV A,55H ;55H是操作数单元的地址,55H单元内的数据才是操作数,取出后送累加器A ③寄存器寻址。在指令中将指定寄存器的内容作为操作数。因此,指定了寄存器就能得 到操作数。寄存器寻址方式中,用符号名称来表示寄存器。 例如:INC R7 ;R7的内容为操作数,加1后再送回R7 ④寄存器间接寻址。在指令中给出的寄存器内容是操作数的地址,从该地址中取出的才 是操作数。可以看出,在寄存器寻址方式中,寄存器中存放的是操作数;而在寄存器间接寻址 方式中,寄存器中存放的则是操作数的地址。 寄存器间接寻址须以寄存器符号名称的形式表示。为了区别寄存器寻址和寄存器间接寻 址,在寄存器间接寻址中,应在寄存器的名称前面加前缀“@”。 例如:ORL A.@Ro;当R0寄存器的内容是60H时,该指令功能是以RO寄存器的内容60H为地址,将60H地址单元的内容与累加器A中的数相“或”,其结果仍存放在A中。
第三章新型传感器 【3】简述湿敏电阻式传感器的工作原理。 答:水分子有较大的偶极矩(分子中征服中心不重合的程度),故易于吸附在固体表面并渗入固体内部。水分子的这种吸附和渗透称为水分子亲和力特征,利用这一特征制作的湿度传感器称为水分子亲和力型湿度传感器。 湿敏电阻是电阻值随着环境相对湿度变化而变化的敏感元件。主要由绝缘基板、湿敏层和电极组成。湿敏层吸收了环境中的水分子后引起电阻值的变化,再经过测量电路转换为电压的形式输出。 【8】光电效应有哪几种?与之对应的光电元件各有哪些? 答:根据光电效应现象的不同特征,可将光电效应分为外光电效应、内光电效应和光生伏打效应三类。 光电器件有:光电管、光电倍增管、光敏电阻(内光电效应)、光敏二极管(内光电效应)、光敏三极管(内光电效应)、光电池(光生伏打效应)和光电耦合器。 【9】光电传感器有哪几部分组成?被测量可以影响光电传感器的哪些部分? 答:光电传感器通常由光源、光学通路和光电元件三部分组成。如图所示。图中Ф1是光源发出的光信号,Ф2是光电器件接受的光信号,被测量可以是x1或者x2,它们能够分别造成光源本身或光学通路的变化,从而影响传感器输出的电信号I。光电传感器设计灵活,形式多样,在越来越多的领域内得到广泛的应用。 【12】超声波传感器如何对工件进行探伤? 答:从超声波的行进方向来看,可分为两种基本类型:投射型和反射型。 超声波探伤是一种无损检测技术,最常用的是脉冲反射法。测试前,先将探头插入探伤仪的连接插座上。探伤仪面板上有一个荧光屏,通过荧光屏可知工件中是否存在缺陷、缺陷的大小及位置。工作时探头放于被测工件上,并在工件上来回移动进行检测。探头发出的超声波,以一定速度向工件内部传播,如工件中没有缺陷,则超声波传到工件底部便产生反射,在荧光屏上只出现始脉冲T 和底脉冲B。如工件中有缺陷,一部分声脉冲在缺陷处产生反射,另一部分继续传播到工件底部反射,在荧光屏上出现三个脉冲,多了一个脉冲F。通过缺陷脉冲在萤光屏上的位置可确定缺陷在工件中的位置,也可以通过脉冲的幅度高低来判别缺陷的大小。 【增】简述智能传感器的构成方法与实现途径。 答:智能传感器可以对信号进行检测、分析、处理、存储和通信,具备了人类的记忆、分析、思考和交流的能力,即具备了人类的智能,所以称为智能传感器。智能传感器主要由传感器、微处理器及相关电路组成。 目前传感技术的发展是沿着三条途径实现智能传感器的: (1)非集成实现:将传统的经典传感器(采用非集成工艺制作的传感器,仅具有获取信号的
光电检测技术与应用课后答案 第1章 1、举例说明你说知道的检测系统的工作原理。 (1)光电检测技术在工业生产领域中的应用:在线检测:零件尺寸、产品缺陷、装配定位…(2)光电检测技术在日常生活中的应用: 家用电器——数码相机、数码摄像机:自动对焦---红外测距传感器自动感应灯:亮度 检测---光敏电阻 空调、冰箱、电饭煲:温度检测---热敏电阻、热电偶遥控接收:红外检测---光敏二极管、光敏三极管可视对讲、可视电话:图像获取---面阵CCD 医疗卫生——数字体温计:接触式---热敏电阻,非接触式---红外传感器办公商务——扫描仪:文档扫描---线阵CCD 红外传输数据:红外检测---光敏二极管、光敏三极管(3)光电检测技术在军事上的应用:夜视瞄准机系统:非冷却红外传感器技术激光测距仪:可精确的定位目标光电检 测技术应用实例简介点钞机 (1)激光检测—激光光源的应用用一定波长的红外激光照射第五版人民币上的荧光字,会使荧光字产生一定波长的激光,通过对此激光的检测可辨别钞票的真假。由于仿制 困难,故用于辨伪很准确。(2)红外穿透检测—红外信号的检测红外穿透的工作原理是利用人民币的纸张比较坚固、密度较高以及用凹印技术印刷的油墨厚度较高,因而 对红外信号的吸收能力较强来辨别钞票的真假。人民币的纸质特征与假钞的纸质特征 有一定的差异,用红外信号对钞票进行穿透检测时,它们对红外信号的吸收能力将会 不同,利用这一原理,可以实现辨伪。 (3)荧光反应的检测—荧光信号的检测荧光检测的工作原理是针对人民币的纸质进行检测。人民币采用专用纸张制造(含85%以上的优质棉花),假钞通常采用经漂白处理后的普通纸进行制造,经漂白处理后的纸张在紫外线(波长为365nm的蓝光)的照射下会出现荧光反应(在紫外线的激发下衍射出波长为420-460nm的蓝光),人民 币则没有荧光反应。所以,用紫外光源对运动钞票进行照射并同时用硅光电池检测钞 票的荧光反映,可判别钞票真假。 (4)纸宽的检测—红外发光二极管及接收二极管的应用主要是用于根据钞票经过此红外发光及接收二极管所用的时间及电机的转速来间接的计算出钞票的宽度,并对机器 的运行状态进行判断,比如有无卡纸等;同时也能根据钞票的宽度判断出其面值。
习题一 2、为什么要在CPU与外设之间设置接口? 在CPU与外设之间设置接口主要有4个原因: (1)CPU与外设二者的信号不兼容,包括信号线的功能定义、逻辑定义和时序关系 (2)CPU与外设的速度不匹配,CPU的速度快,外设的速度慢 (3)若不通过接口,而由CPU直接对外设的操作实施控制,会使CPU处于穷于应付与外设打交道之中,大大降低CPU的效率 (4)若外设直接由CPU控制,会使外设的硬件结构依赖于CPU,对外设本身的发展不利。 3、微型计算机的接口一般应具备那些功能? 微机的接口一般有如下的几个功能: (1)执行CPU命令的功能:CPU将对外设的控制命令发到接口电路中的命令寄存器(命令口)中,在经分析去控制外设 (2)返回外设状态的功能:通过状态寄存器(状态口)完成,包括正常工作状态和故障状态 (3)数据缓冲的功能:接口电路中的数据寄存器(数据口)对CPU于外设间传送的数据进行中转 (4)设备寻址的功能:CPU某个时刻只能和一台外设交换数据,CPU发出的地址信号经过接口电路中的地址译码电路来选中I/O设备 (5)信号转换的功能:当CPU与外设的信号功能定义、逻辑关系、电平高低及工作时序不兼容时接口电路要完成信号的转换功能 (6)数据宽度与数据格式转换的功能:由于CPU处理的数据都是并行的,当外设采用串行传送方式时,接口电路就要完成串、并之间的转换,并进行数据格式的转换。 8、CPU与接口之间有哪几种传送数据的方式?它们各应用在什么场合? CPU与接口之间的数据传送方式主要有查询方式、中断方式和DMA方式:(1)查询方式:主要用于CPU不太忙且传送速度不高的情况下。无条件传送方式作为查询方式的一个特例,主要用于对简单I/O设备的控制或CPU 明确知道外设所处状态的情况下。 (2)中断方式:主要用于CPU的任务比较忙的情况下,尤其适合实时控制和紧急事件的处理 (3)DMA方式(直接存储器存取方式):主要用于高速外设进行大批量数据传送的场合。 9、分析和设计接口电路的基本方法是什么? 分析和设计接口电路通常采用两侧分析法和硬软件结合法相结合: (1)两侧分析法:CPU一侧,主要是了解CPU的类型、它提供的数据线的宽度、地址线的宽度、控制线的逻辑定义、时序关系的特点;外设一侧,主要是了解被连接外设的外部特性及被控外设的工作过程 (2)硬软件结合法:硬件设计主要是合理选用外围接口芯片、有针对性地设计附加电路;软件设计可以采用汇编语言(或高级语言)直接对低层硬件编程,也可以采用DOS系统功能调用和BIOS调用编程。 习题二
《单片机原理及接口技术》(第2版)人民邮电出版社 第3章 8051指令系统与编程基础 思考题及习题3 1.说明伪指令的作用。“伪”的含义是什么?常用伪指令有哪些?其功能如何? 答:伪指令是程序员发给汇编程序的命令,只有在汇编前的源程序中才有伪指令,即在汇编过程中的用来控制汇编过程的命令。所谓“伪”是体现在汇编后,伪指令没有相应的机器代码产生。常用伪指令及功能如下: ORG(ORiGin)汇编起始地址命令;END(END of assembly)汇编终止命令;EQU(EQUate)标号赋值命令;DB(Define Byte)定义数据字节命令;DW(Define Word)定义数据字命令;DS(Define Storage)定义存储区命令;BIT 位定义命令 2.解释下列术语: 手工汇编,机器汇编,反汇编 答:手工汇编:通过查指令的机器代码表(表3-2),逐个把助记符指令“翻译”成机器代码,再进行调试和运行。这种人工查表“翻译”指令的方法称为“手工汇编”。 机器汇编:借助于微型计算机上的软件(汇编程序)来代替手工汇编。通过在微机上运行汇编程序,把汇编语言源程序翻译成机器代码。 反汇编:将二进制的机器码程序翻译成汇编语言源程序的过程称为“反汇编”。 3.下列程序段经汇编后,从1000H开始的各有关存储单元的内容是什么? ORG 1000H TAB1 EQU 1234H TAB2 EQU 3000H DB "MAIN" DW TAB1,TAB2,70H 答:从1000H开始的各有关存储单元的内容(16进制)如下: 4DH,41H,49H,4EH,12H,34H,30H,00H,00H,70H 4.设计子程序时应注意哪些问题? 答:编写子程序时应注意以下问题: 子程序的第一条指令前必须有标号。 主程序调用子程序,有如下两条子程序调用指令:
第二章测试系统 2-2 解释下列概念:频率特性、频响函数和工作频带 解:频率特性是指测试系统反映出来的输出与输入幅值之比和两者之间相位差是输入频率的函数的特性。 频响函数是指系统稳态输出量的付立叶变换与输入量的付立叶变换之比。(参见教材P11页) 或者频响函数是指当测试系统的输入为正弦信号时,将该信号的输出与输入之比。 工作频带是指测试装置的适用频率范围,在该频率范围内,仪器装置的测试结果均能保证达到其它相关的性能指标。(或P25工作频率范围) 2-4 某动压力测量时,所采用的压电式压力传感器的灵敏度为90.0nC/MPa,将它与增益为0.005V/nC的电荷放大器相连,然后将其输出送入到一台笔式记录仪,记录仪的灵敏度为20mm/V,试计算系统的总灵敏度。又当压力变化3.5MPa时,记录笔在记录纸上的偏移量是多少? 解:系统总灵敏度为:90.0×0.005×20=9mm/MPa 当压力变化3.5MPa时,记录笔在记录纸上的偏移量为: 3.5×9=31.5mm
2-5 用某一阶装置测量频率为100Hz 的正弦信号,要求幅值误差限制在5%以内,问其时间常数应取多少?如果用具有该时间常数的同一装置测量频率为50Hz 的正弦信号,试问此时的幅值误差和相角差分别为多少? 解:(1)根据一阶系统的幅频特性可知: %51) (111)(A 2 ≤-+= -τωω,即%5) (1112 ≤+- τω 将Hz f ππω0022==代入上式,可解得:41023.5-?≤τ (2)用该装置测量频率为50Hz 的正弦信号时: 013.01) (111)(A 2 =-+= -τωω,故幅值差为1.3% 相角差:ο3.9)arctan()(-=-=τωωφ 2-6 设用一个时间常数为1s .0=τ的一阶装置测量输入为 t t t x 40sin 2.04sin )(+=的信号,试求其输出)(t y 的表达式。设静态灵敏 度K=1。 解:根据一阶系统的幅频特性2 ) (1K )(A τωω+= 、 相频特性)arctan()(τωωφ-=以及静态灵敏度K=1, 将数据代入,可得: )96.7540sin(048.0)8.214sin(93.0) 4arctan 40sin(171 2.0)4.0arctan 4sin(16.11)(οο-+-=-?+-=t t t t t y
第三章 一、选择题 1.电涡流传感器是利用 材料的电涡流效应工作的。 A.金属导电 B.半导体 C .非金属 D .PVF2 2.为消除压电传感器电缆分布电容变化对输出灵敏度的影响,可采用 。 A.电压放大器 B.电荷放大器 C .前置放大器 3.调频式电涡流传感器的解调电路是 。 A.整流电路 B.相敏检波电路 C.鉴频器 4.下列传感器中 是基于压阻效应的。 A..金属应变片 B.半导体应变片 C.压敏电阻 5.石英晶体沿机械轴受到正应力时,则会在垂直于——的表面上产生电荷量。 A.机械轴 B.电轴 C.光轴 6.金属丝应变片在测量构件的应变时,电阻的相对变化主要由 来决定的。 A.贴片位置的温度变化 B.电阻丝几何尺寸的变化 C.电阻丝材料的电阻率变化 7.电容式传感器中,灵敏度最高的是 。 A.面积变化型 B .介质变化型 C .极距变化型 8.极距变化型电容传感器适宜于测量微小位移量是因为 。 A.电容量微小影响灵敏度 B.灵敏度与极距的平方成反比,间距变化大则产生非线性误差 C.非接触测量 9.高频反射式涡流传感器是基于 效应来实现信号的感受和变换的。 A.涡电流 B.纵向 C.横同 10.压电材料按一定方向放置在交变电场中,其几何尺寸将随之发生变化,这称为 效应。 A.压电 B.压阻 C.压磁 D.逆压电 二、填空题 1.可用于实现非接触式测量的传感器有 和 等。 2.电阻应变片的灵敏度表达式为E l dl R dR S λγ++==21//,对于金属应变片来说:S = , 而对于半导体应变片来说S = 。 3.具有 的材料称为压电材料,常用的压电材料有 和 。 4.光电元件中常用的有 、 和 。 5.压电传感器在使用 放大器时,其输出电压几乎不受电缆长度变化的影响。 6.电阻应变片的电阻相对变化率是与 成正比的。 7.压电传感器在使用电压前置放大器时,连接电缆长度的改变,测量系统的 也 将发生变化。 8.电容式传感器有 型 型和 型3种类型,其中 型的灵敏度最高。 9. 霍尔元件是利用半导体元件的 特性工作的。 10. 按光纤的作用不同,光纤传感器可分为 和 两种类型。
第三章参考答案 1.按照题目中提出的要求,写出能达到要求的一条(或几条)汇编形式的指令: ⑴将一个立即数送入寄存器BX; ⑵将一个立即数送入段寄存器DS; ⑶将变址寄存器DI的内容送入一个存储单元中; ⑷从存储单元中取一个数送到段寄存器ES中; ⑸将立即数0ABH与AL相加,结果送回AL中; ⑹把BX与CX寄存器内容相加,结果送入BX; ⑺用寄存器间接寻址方式,实现一个立即数与存储单元内容相加,结果放回存储器。解:(1)MOV BX, 1234H (2)MOV AX, 1234H MOV DS, AX (3)MOV [BX], DI (4)MOV ES,[BX] (5)ADD AL,0ABH (6)ADD BX,CX (7)MOV AX,[BX] ADD AX,1234H MOV [BX],AX 2.执行下面程序,完成指令后的填空: MOV AX,2000H ;AH= 20H MOV DS,AX ;AL= 00H DS= 2000H MOV SS,AX ;SS= 2000H AX= 2000H MOV BX,2030H ;BH= 20H BL= 30H MOV SI,BX ;SI= 2030H MOV DI,3040H ;DI= 3040H MOV SI,DI ;SI= 3040H MOV SP,50FFH ;SP= 50FFH MOV DX,SP ;DH= 50H DL= FFH MOV CL,25 ;CL= 19H MOV BL,CL ;CL= 19H BL= 19H MOV AH,0F0H ;AH= F0H MOV CH,AH ;CH= F0H MOV BYTE PTR[DI],64 ;(DI)= 40H MOV WORD PTR[SI],256 ;(SI)= 00H (SI+1)= 01H MOV DL,[SI+1] ;DL= 01H MOV DH,1+[SI] ;DH= 00H MOV AL,1[SI] ;AL= 01H MOV WORD PTR[BX][SI],34 ;(BX+SI)= 22H (BX+SI+1)= 00H MOV [BX+SI+4],BL ;(BX+SI+4)= 19H MOV BP,2[BX+DI] ;BP= 00H MOV [BP],AL ;(BP)= 01H MOV AX,[BP][DI] ;AX= 0100H MOV BL,AL ;BL= 00H MOV ES,BX ;ES= 2000H PUSH BX ;SP= 50FDH (SP,SP+1)= 2000H PUSH DI ;SP= 50FBH (SP,SP+1)=
习题 1.指出下列指令中操作数的寻址方式 (1) MOV BX, 20H (2) MOV AX, [1245H] (3) MOV DX, [SI] (4) MOV 100[BX], AL (5) MOV [BP][SI], AX (6) MOV [BX+100][SI], AX (7) MOV [1800H], AL (8) MOV [SI], AX 答: 源操作数目的操作数 1 立即寻址寄存器寻址 2 直接寻址寄存器寻址 3 寄存器间接寻址寄存器寻址 4 寄存器寻址寄存器相对寻址 5 寄存器寻址基址加变址寻址 6 寄存器寻址相对基址加变址寻址 7 寄存器寻址直接寻址 8 寄存器寻址寄存器间接寻址 2. 判断下列操作数寻址方式的正确性,对正确的指出其寻址方式,错误的说明其错误原因:(1) [AX] (2) [SI+DI] (3) BP (4) BH (5) DS (6) [BL+44] (7) [BX+BP+32] (8) [DX] (9) [CX+90] (10) [BX*4] (11) BX+90H (12) SI[100H] 答: (1) 错误,AX不能用于访问内存单元 (2) 错误,两个变址寄存器SI和DI不能同时用于内存单元的有效地址 (3) 正确,寄存器寻址方式 (4) 正确,寄存器寻址方式 (5) 正确,寄存器寻址方式 (6) 错误,寄存器BL不能用于表示内存单元的有效地址 (7) 错误,BX和BP都是基址寄存器,不能同时用于内存单元的有效地址 (8) 错误,DX不能用于表示内存单元的有效地址 (9) 错误,CX不能用于表示内存单元的有效地址 (10)错误,16位寄存器不能乘以比例因子 (11) 错误,没有这样的寻址方式 (12) 错误,书写方式不对,应该写成100H[SI] 3. 已知DS=2000H,ES=1000H,SS=1010H,SI=1100H,BX=0500H,BP=0200H,请指出下列源操作数字段是什么寻址方式?源操作数字段的物理地址是多少? (1) MOV AL, [2500H] (2) MOV AX, [BP] (3) MOV AX, ES:[BP+10] (4) MOV AL, [BX+SI+20]