第五章 控制系统的频率响应法
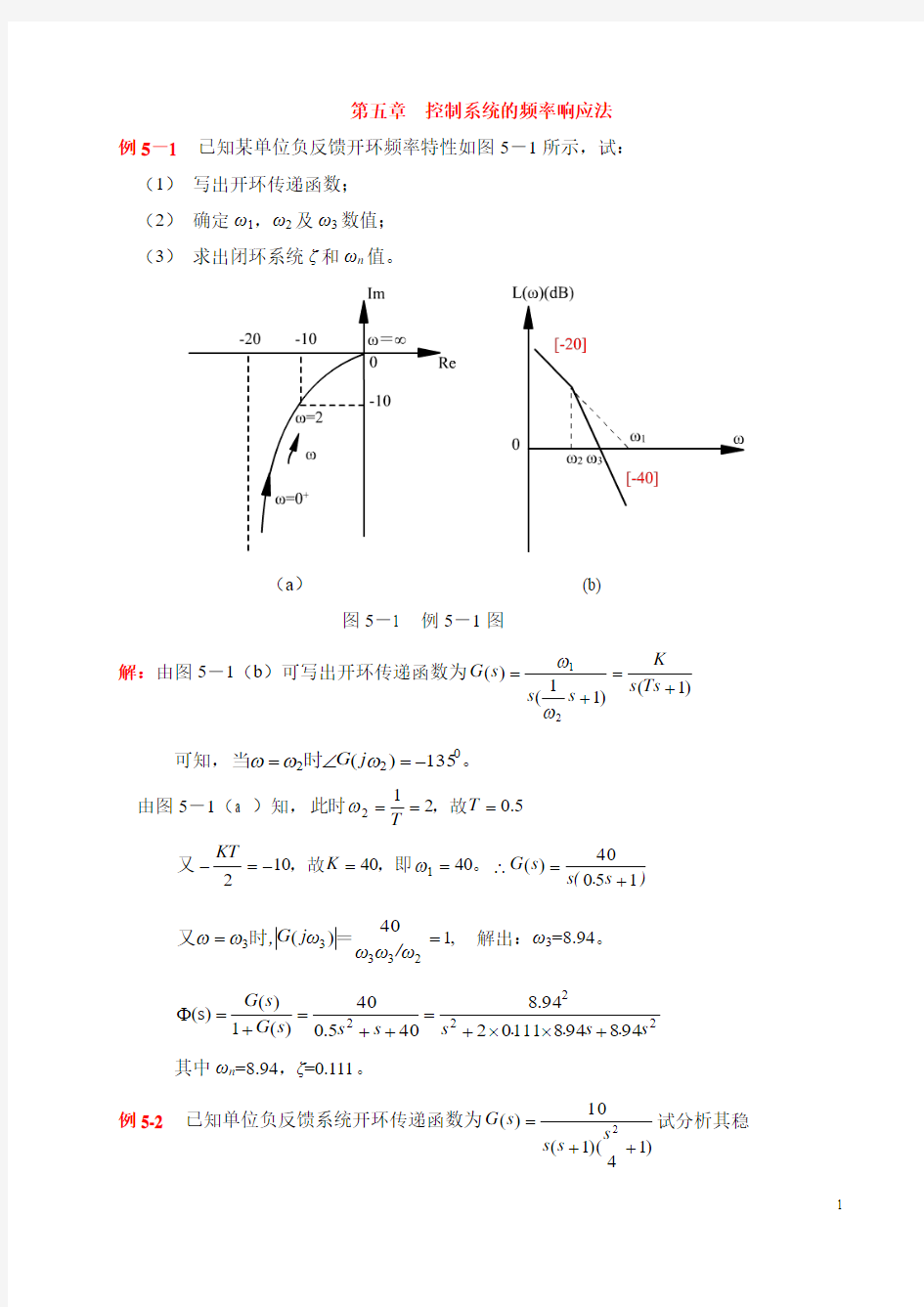
例5-1 已知某单位负反馈开环频率特性如图5-1所示,试: (1) 写出开环传递函数; (2) 确定ω1,ω2及ω3数值; (3) 求出闭环系统ζ和ωn 值。
(a ) (b) 图5-1 例5-1图 解:由图5-1(b )可写出开环传递函数为)
1()
11
(
)(2
1
+=
+=
Ts s K
s s s G ωω
可知,。时当022135)(-=∠=ωωωj G 由图5-1(a )知,5.021
2===
T T
,故此时ω 。,即,故又40401021==-=-
ωK KT )
s .s(s G 15040
)(+=∴ ,140
)(2
3333==/ωωωj ωG ,=
时又ωω 解出:ω3=8.94。
2
2
2
29489481110294.8405.040)(1)()s (s .s ..s s s s G s G +??+=++=+=Φ 其中ωn =8.94,ζ=0.111。
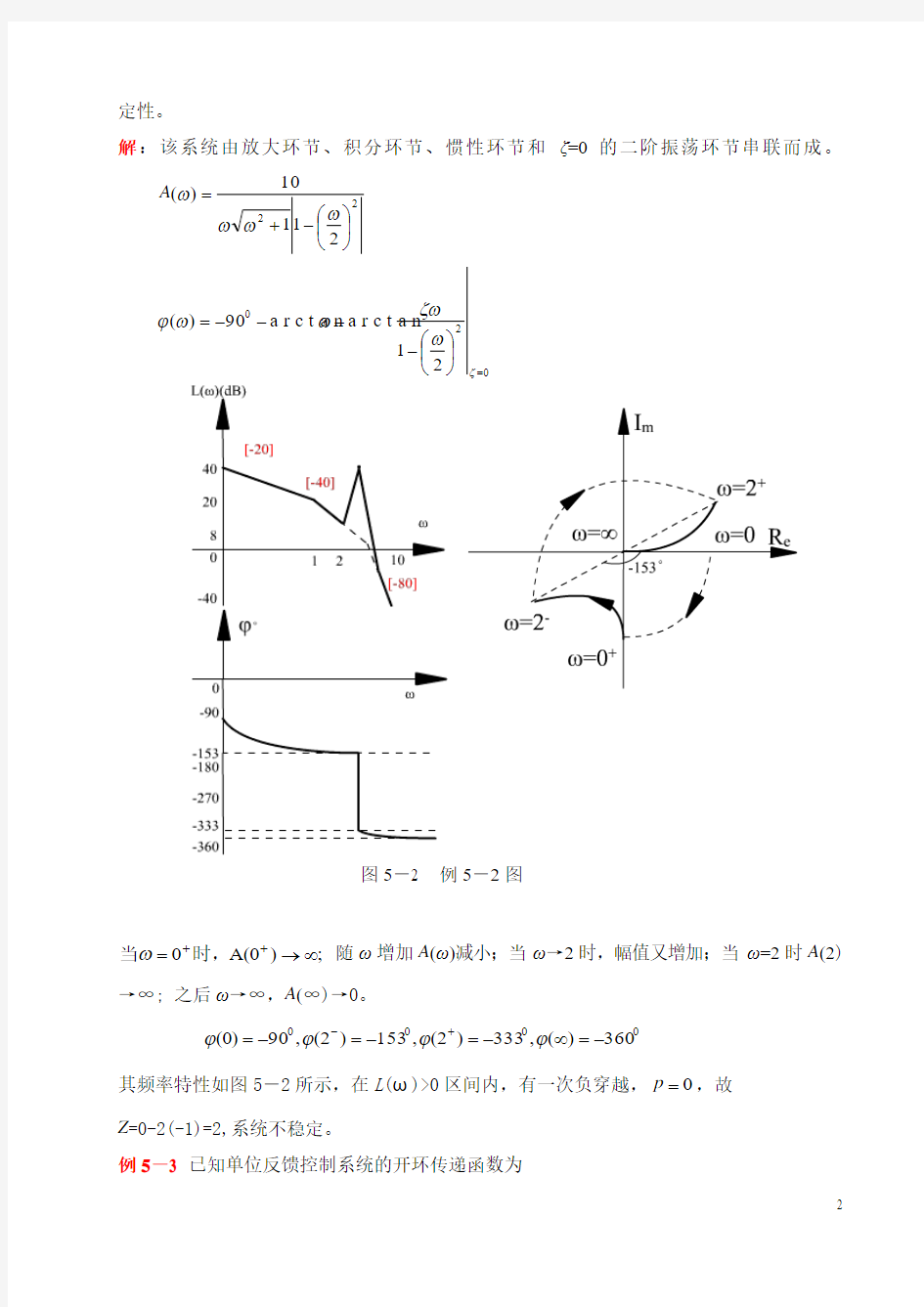
例5-2 已知单位负反馈系统开环传递函数为)
14
)(1(10
)(2
++=
s s s s G 试分析其稳
定性。
解:该系统由放大环节、积分环节、惯性环节和ζ=0的二阶振荡环节串联而成。
2
221110
)(?
?
?
??-+=
ωωωωA
2
021a r c t a n a r c t a n 90)(=??? ??----=ζωζω
ωω?
图5-2 例5-2图
;)0(A 0∞→=++时,当ω 随ω增加A (ω)减小;当ω→2时,幅值又增加;当ω=2时A (2) →∞; 之后ω→∞,A (∞)→0。
0000360)(,333)2(,153)2(,90)0(-=∞-=-=-=+-????
其频率特性如图5-2所示,在L (ω)>0区间内,有一次负穿越,0=p ,故 Z =0-2(-1)=2,系统不稳定。
例5-3 已知单位反馈控制系统的开环传递函数为
)
1)(5)(2()(1
-++=
s s s K s G
试画出系统的极坐标频率特性曲线并确定系统稳定性条件。 解: )
1)(15
1
)(121(52)
1)(5)(2()(1
1
-++?=
-++=
s s s K s s s K s G
)
1)(1)(1(321-++=
s T s T s T K
式中,。=s T s T s T K K 1,2.05
1
,5.021,103211=====
)
1)(1)(1()321ωjT ωjT ωjT K
G(j ω+-++=
)
1)(1)(1()1)(1)(1(2
23222221321ωT ωT ωT ωjT ωjT ωjT K +++----=
)
)(1)(1(1(]1)[(2
2
32
2
12
2
123213212323121ωωωωωωT T T K
T T T T T T j T T T T T T K ++++-++---=
)
))(1)(1(1]1)[()(2
2
32
2
12
2
12323121ωωωωωT T T T T T T T T K P +++---=
)
)(1)(1(1()(2
2
32
2
12
2
12321321ωωωωωωT T T T T T T T T K Q ++++-+=)
2
232
222
2
1111)(ω
ω
ω
ωT T T K
A +++=
ωωωω?3021arctan 180arctan arctan )(T T T +---=
()时,
当12323121=--ωT T T T T T 0)(1
3
23121=--=ωωP T T T T T T 时,即当
时时,即当当3
212
132
3213210T T T T T T T T T T T T --==+-+ωω,Q (ω)=0。
,,,,本例6.012.05.0323121321-=--===T T T T T T T T T 所以ω在实数范围内,不存在P (ω)=0。
,33
212
13时当=--=
T T T T T T ω,375.0)3(,0)3(K P Q -==
0180)3(,375.0)3(-==?K A
;-180(0),00,)0(,000===-==?ωK )A(Q K )P(时,当 。时,当0-270)(0,)(A 0,)(,0)(=∞=∞=∞=∞∞=?ωQ P
图5-3 例5-3图
系统的开环幅相频率特性如图5-3所示。作出其镜像(图中虚线),从图中可以看出,要使系统稳定,G (j ω)及其镜像应逆时针包围(-1,j 0)点一圈,即(-1,j 0)点应落在负实轴(-K ,-0.375K )段。因此,系统稳定条件:K >1和0.375K <1,即1 例5-4 已知系统的开环频率特性如图5-4所示,图中p 为开环传递函数在右半平面的极点数,ν为系统无差度。试写出系统开环传递函数的形式并判别系统的稳定性。 图5-4 例5-4图 解:(a )由图(a) 得ν=3,p =0。 ;27090)0(000-=?-=→ν?ω时,当 。时,当009090)m n ()(-=?--=∞∞→?ω 得n-m =1。设3 21k 1)(1()(s s s K s G ) ++= ττ 作出ω→0+时极坐标特性在无穷远处的一段轨迹(如图(a)中虚线所示),可知频率特性在ω:0→∞时,不包围(-1,j 0)点,所以闭环系统是稳定的。 (b )由图(b)可知,00090)(0)(,180)0(,1,0?--==∞-===m n p ??ν 故n-m =0。设) 1)(1() 1)(1()(2121+-++= s T s T s s K s G k ττ,作出G k (j ω)镜像,可知G k (j ω)及其镜像当 +∞→-∞:ω时顺时针包围(-1,j 0)点一圈,所以Z =N + p =1+1=2,即闭环系统在右半s 平 面的极点数为2,系统不稳定。 (c )) 1)(1)(1() 1)(1()(32121--+++= s T s T s T s s s G k ττ ωωωτωτω?30121arctan 180arctan arctan arctan )(T T +--+= ;360)0(00-=→?ω时,当090)(-=∞∞→?ω时,当 从图(c)可以看出,点一圈,逆时针包围时,:当)0(-1,)j (0k j G ωω∞→ 即N ˊ=1=- p /2,所以闭环系统稳定。 例5-5 已知某反馈控制系统的开环传递函数为 ) 1001.0)(10025.0)(105.0() 10167.0(500)(++++= s s s s s s G k 试绘制系统的开环对数幅频特性和相频特性,并确定闭环系统稳定性、幅值裕度、相角裕度以及时域指标σ%、t s 。 解:ν=1,L (ω)低频渐近线斜率为-20dB/dec ;K =500,20lg K =54(dB )。通过(ω=1,L =54dB)点或通过(ω=500,L =0dB)点作-20dB/dec 斜率的低频渐近线。按时间常数大小,从小到大依次标注各转折频率: ,2005 .01 1== ω 对应惯性环节特性,L (ω)斜率变化率为-20dB/dec ; ,600167.01 2== ω对应一阶微分环节特性,L (ω)斜率变化率为+20dB/dec ; ,4000025.01 3== ω对应惯性环节特性,L (ω)斜率变化率为-20dB/dec ; ,1000001 .01 4==ω对应惯性环节特性,L (ω)斜率变化率为-20dB/dec 。 从而绘出系统的开环对数幅频特性(渐近线),如图5-5所示。 图5-5 例5-5图 相频特性: ωωωωω?001.0arctan 0025.0arctan 0167.0arctan 05.0arctan 90)(0--+--= 绘出系统的开环对数相频特性,如图5-5所示。 从Bode 图可看出, 0090.44,1.135)(,/1.167=-==γω?ωc c s rad dB L dB L s rad g g g 3.14,3.14)(,/590=-==ωω 所以闭环系统稳定。 时域指标由近似公式求: %7.32%1001sin 14.016.0%=???? ?? ????? ??-+=γσ )(058.01sin 15.21sin 15.122 s t c s =??? ????????? ??-+???? ??-+= γγωπ 例5-6 系统结构图如图5-6所示,用奈式判据确定τ的稳界值。 图5-6 例5-6图 解: 系统开环传递函数和开环频率特性为 ,) 1() 1()11.0()1()10()1(10)(-+=-+=-+= Ts s s s s s s s s s G τττT =0.1s ) 1(1)(ωωτω ωjT j j j G +-+= ,1)(22ωτωT T P ++-=)1(1)(222 ωωωτωT T Q +-= , 222211)(ω ωωτωT A ++= ω τωωτωω τωω?T T T arctan arctan 270)arctan 180(arctan 901 arctan arctan 90)(0000++-=--+-=--+-= ;270)0(,)0(A ,)0(,)0(00-=∞=∞=+==?τωQ T P 时,当 ;90)(,0)(A ,0)(,0)(0-=∞=∞=∞=∞∞=?ωQ P 时,当 。,时,当02-180,A ,-0,011 =====-= ?ττωττωP Q T T 图5-7所示为G (j ω): ω从0→∞的幅相频率特性,并绘制其镜像。因G (s )有一个开环极 点在右半s 平面,即右半s 平面的极点数p =1。为使闭环稳定,G (j ω)特性及其镜像需逆时针包围(-1,j 0)点一圈,为此,G (j ω)与负实轴交点-τ应在负实轴-1点左侧,即-τ<-1, 也即τ>1。τ=1时,G (j ω)刚好穿过 (-1,j 0) 点,系统临界稳定:τ<1时, G (j ω)曲线顺 时针包围(-1,j 0)点,系统不稳定。 例5-7 设某单位负反馈系统的开环传递函数为 )100 ()(2 1 ++= s s s K s G 若要求系统的幅值裕度为20db, 问开环增益K 应取何值? 解:(1)解析计算法 从开环传递函数)(s G 求得给定系统的开环幅频特性)(ωj G 与开环相频特性 )(ωj G ∠分别为 2 221 )100()(ω ωωω+-= K j G 2 010090)(ω ω ω---=∠arctg j G 设g ωω=时,。0180)(-=∠g j G ω将g ωω=代入得 02 g g g 180100arctan 90)(-=---=∠ωωωj G 解出 s r a d g /10=ω 将10==g ωω代入得 100 10)10100(10)(1 2 221 K K j G g =+-= ω 根据以对数形式表示的系统幅值裕度的定义,得 1 100 log 20)(1log 20K j G L g g ==ω 根据幅值裕度应为20db 的要求,解得 K 1=10 又因为 ) 101.001.0()101.001.0(100)(2 21 ++=++= s s s K s s s K s G , 图5-7 例5-6图 所以 1.0100 1 ==K K (2) Bode 图法 根据时间常数T =0.1s ,确定振荡环节的转折频率 s rad T n /10/1==ω 处在转折频率n ω,,1809090)(000n -=--=∠ωj G 系统开环相角 图5-8 例5-7图 。 有可见对给定系统来说,g n ωω= 又根据,2/1log 20)(log 20ζω=n A 求得转折频率05.0=ζω处当n 时振荡环节的渐近对数幅频特性的修正值为20dB,在此基础上,再加上对幅值裕度所要求的20dB ,因此在振荡环节转折频率ωn 处,系统渐近对数幅频特性的对数幅值应等于-40dB 。 设由点。决定的点为及A 40dB )(20log /10n -==ωωj G s rad n 经过A 向高频段作一斜率为-60dB/dec 的直线,而向低频段作一斜率为-20dB/dec 的直线,该直线在ω=0.1rad/s 处过横轴,见图5-12。 ,20dB 20log )1(20log 12-5-==K j G 根据由图从而确定出满足题意要求的开环增益K =0.1s -1。 第五章习题与解答5-1试求题5-1图(a)、(b)网络的频率特性。 u r R1 u c R2 C R2 R1 u r u c (a) (b) 题5-1图 R-C网络 解(a)依图: ? ? ? ? ?? ? ? ? + = = + = + + = + + = 2 1 2 1 1 1 1 2 1 2 1 1 1 1 1 1 2 2 1 )1 ( 1 1 ) ( ) ( R R C R R T C R R R R K s T s K sC R sC R R R s U s U r cτ τ ω ω τ ω ω ω ω ω 1 1 1 2 1 2 1 2 1 2 1 ) 1( ) ( ) ( ) ( jT j K C R R j R R C R R j R j U j U j G r c a+ + = + + + = = (b)依图: ? ? ? + = = + + = + + + = C R R T C R s T s sC R R sC R s U s U r c ) ( 1 1 1 1 ) ( ) ( 2 1 2 2 2 2 2 2 1 2τ τ ω ω τ ω ω ω ω ω 2 2 2 1 2 1 1 ) ( 1 1 ) ( ) ( ) ( jT j C R R j C R j j U j U j G r c b+ + = + + + = = 5-2某系统结构图如题5-2图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出) (t c s 和稳态误差) (t e s (1)t t r2 sin ) (= (2)) 45 2 cos( 2 ) 30 sin( ) (? - - ? + =t t t r 题5-2图反馈控制系统结构图 第五章系统的频率特性分析 本章目录 5.1 频率特性 5.2 对数坐标图 5.3 极坐标图 5.4 乃奎斯特稳定判据 5.5 相对稳定性分析 5.6 频域性能指标和时域性能指标的关系 小结 本章简介 在经典的控制系统分析方法中,有两种基本方法是可以不需解微分方程而可对控制系统的性能进行分析和校正的:其一是上一章的根轨迹法,其二即本章介绍的频率特性分析法。频率响应法是一种工程方法,是以传递函数为基础的一种控制系统分析方法。这种方法不仅能根据系统的开环频率特性图形直观地分析系统的闭环响应,而且还能判别某些环节或参数对系统性能的影响,提示改善系统性能的信息。控制系统的频域分析方法不仅可以对基于机理模型的系统性能进行分析,也可以对来自于实验数据的系统进行有效分析。它同根轨迹法一样是又一种图解法,研究的主要手段有极坐标图(Nyquist图)和伯德图(Bode图)法。 与其它方法相比较,频率响应法还具有如下的特点: 1)频率特性除可以由前述传递函数确定外,也可以用实验的方法来确定,这对于难以列写微分方程式的元部件或系统来说,特别便于工程上的应用。 2)由于频率响应法主要是通过开环频率特性的图形对系统进行分析,因而具有形象直观和计算量较少的特点。 3)频率响应法不仅适用于线性定常系统,而且还适用于传递函数不是有理数的纯滞后系统和部分非线性系统的分析。 由于上述的特点,频率响应法不仅至今仍为控制理论中的一个重要内容,而且它的有关理论和分析方法已经广泛应用于鲁棒多变量系统和参数不确定系统等复杂系统的研究中。 本章我们将在介绍控制系统频率特性的基本概念后,着重于开环控制系统的频率特性分析:极坐标图(Nyquist图)和半对数坐标图(Bode图),同时将应用Matlab工具分析控制系统的频率特性,最后简要分析开环控制系统的频率特性与闭环控制系统的频率特性的关系,并研究它们与控制系统性能指标的关系。 5.1频率特性 频率特性又称频率响应,它是指系统或元件对不同频率的正弦输入信号的响应特性。系统的频率特性可由两个方法直接得到:(1) 机理模型—传递函数法;(2) 实验方法。 5.1.1 由传递函数求系统的频率响应 设系统的开环传递函数 (5—1) 对应的频率特性为 (5—2) 如果在S平面的虚轴上任取一点,把该点与的所有零、极点连接成向量,并将这些向量分别以极坐标的形式表示: 则式(5-3)可改写为 (5-3) 由上式得到其对应的幅值和相角:自动控制原理 第五章频率响应分析法习题及答案
第五章:频率响应法
相关主题
文本预览