3-D Meshing (Hypermesh 3D网格划分经验_英语原文+汉语注释)
- 格式:pdf
- 大小:6.70 MB
- 文档页数:16
hypermesh面板命令一览表(中英文)预览说明:预览图片所展示的格式为文档的源格式展示,下载源文件没有水印,内容可编辑和复制Hypermesh 命令一览表(上)Geom主面板 (3)Nodes子面板/Distance子界面 (3)Node edit 子界面 (3)Line edit子面板 (4)Lines子面板 (4)Defeature 子界面 (4)Circles 子界面 (4)Surfaces子界面/Surface edit子界面 (5)Midsurface 子界面 (6)Solids 子界面 (6)Solid edit 子界面 (7)Primitives 子界面 (7)Edge edit 子界面/ Point edit 子界面 (8)Auto cleanup 子界面 (9)Quick edit 子界面 (9)1D主面板 (9)Masses 子界面/Shp 子界面 (10)Rigids 子界面 (10)Fe joints 子界面 (10)Bars 子界面 (10)Connectors 子界面 (10)Spotweld 子界面 (13)Hyperbeam 子界面 (13)Line mesh 子界面/Vectors 子界面 (13)Systems 子界面 (14)Edit element 子单元 (14)Split 子单元 (14)Replace子单元/Detach子单元 (14)2D主面板 (14)Cones 子界面 (15)Planes 子界面 (15)Spheres 子界面 (15)Torus 子界面 (15)Drag 子界面 (16)Spin 子界面 (16)Elem offset 子界面 (16)Auto mesh 子界面 (16)Composites子界面 (17)Shrink wrap 子界面 (17)Smooth 子界面 (17)1Quality index 子界面 (17)Elem cleanup 子界面 (17)3D 主面板 (18)Solid map 子界面 (18)Linear solid子界面/ Solid mesh 子菜单 (18) Tetramesh子界面 (19)Geom主面板Line edit 子面板Lines 子面板Defeature 子界面Surfaces子界面Surface edit子界面Solid edit 子界面Auto cleanup 子界面Quick edit 子界面1D 主面板Shp 子界面Rigids 子界面二级子界面Organize。
Altair软件Hyperworks10.0Hypermesh功能操作中文版张燕华译一字一句打上,不妥之处难免,还望大家批评指正中文资料optistruct指南文档(付费)碰撞关键字(控制文件)中文版(免费)Hypermesh与abaqus接口文档(免费) Hypermesh与dyna接口文档(免费)Hypermesh指南文档(免费)ANSA(网格划分部分)(免费)疲劳Ncode7.0(design life) (免费)更多软件和法规,范例资料,慢慢翻译积累资料声明资料翻译费时费力,希望能让您的学习过程感到省时,给力!我本来不想发行电子版的,传到网上可能会被复制,粘贴,so easy的事情,我就得 “被雷锋”了。
个人建议:或许您能够偶尔得到一份只言片语的资料,或者是某个方面的资料,但是如果您想得到更多更全的学习资料,建议你亲自联系我们。
比如,做碰撞的,想学习NVH,学习流体,学习疲劳,电磁场等;做汽车行业的,想看看其他行业(如航空,重工,电子产品,生命科学)主打软件是什么,比如高薪的航空工业疲劳分析工程师,一汽,泛亚,上海大众,上汽,北汽疲劳工程师主要应用Ncode(疲劳软件的鼻祖,功能最全,最强大);还有船舶行业patran软件,很多经典资料(像Patran PCL Workshop Notes)还木有中文版。
在一个或两个方面特别精通的基础上,再对其它方面熟悉,或许您会更受业内欢迎。
如果您需要更多,关于Hyperworks,ansa,MSC.patran,nastran,dytran;LS-dyna,abaqus,adams,ansys,madymo,MoldFlow,MARC, Ncode,Optistruct帮助文档中文版。
请联系:QQ:290538306邮箱:zzuzhangyanhua@很多资料国内代理公司不公开或者根本没有。
到我们这里,某些已有中文版,暂时没有的资料可以从无到有,欢迎团购,更欢迎个人。
HW英文翻译dangle 摇摆 Warpage 翘曲, 扭曲, 热变形Aspect_Ratio 纵横比屏幕高宽比 Split v.劈开, (使)裂开, 分裂, 分离 n.裂开, 裂口, 裂痕Tria Triaangle trigon n.三角形, ellipsoid n.椭圆体project 投影计划实施 normals 法线align node 对齐节点 b 返回以前视图 backz zoom p plot 刷新显示w windows f fillr rotate c center t 设定视角显示 a arc 弧形s slide 移动缩放 surfaces and faces 曲面和表面duplicate复制 reject 否定拒绝tol tolerance 公差 mandatory 命令的, 强制的, 托管的retrieve v.重新得到 n.找回 centroid n. 质心trim adj. 整齐的, 整洁的 vt. 整理, 修整, 装饰 morph 变形 exponential 指数快捷键F1 -- Hidden Line 隐藏线F2 -- Delete 删除(删除任何对象都用此命令)F3 -- Replace 合并两个节点F4 -- Distance 测量距离,角度等F5 -- Mask 隐藏F6 -- Element Edit 单元编辑(创建,合并,分割单元等)F7 -- Align Node 节点共线排列F8 -- Create Node 创建节点F9 -- Line Edit 线编辑(非边界编辑)F10 -- Check Elem 单元质量检查F11 -- collectorsF12 -- Automesh 自动网格划分Shift+F1-F12, Ctrl+F1-F6Key Function key only plus SHIFT plus CTRL key F1 hidden line color print slideF2 delete temp nodes slide fileF3 replace edg print eps (Note: Works only on UNIX)F4 distance translate eps fileF5 mask find print b/w eps F6 element edit split JPEG fileF7 align node projectF8 create node node editF9 line edit surf editF10 check element normalsF11 collectors organizeF12 automesh smoothSolid 体collector 集合器 Connectors 焊点Loads (constraints, forces, pressures,etc.) 约束,集中力,面力等Equations (mathematical link between nodes) 约束方程Multibodies 多刚体 equivalency n. 相等, 等价skew adj. 歪斜的 abort 异常中断, 中途失败biasing 偏置, 偏压 algorithm [数]运算法则curvature 弯曲, 曲率 chordal 弦的似弦的Interior Angle 内角 Aspect Ratio 长宽比Skew Angle 扭曲程度 Warp Angle 翘曲度Chordal Deviation 弦差 Jacobian 雅可比plate 面 solid 体hexa hexahedral 六面体的 TetraMesh 四面体网格划分detach 分开分离 criteria 标准Drag 拉伸 Spin 旋转Line Drag 沿线拉伸 Element Offset 单元偏移Linear Solid 线性近似 Solid Map 映射beamsectcols 保存梁截面信息的collector beamsects 梁截面non-rigid adj.非刚性的 Moments of inertia 转动惯量arrow tip 箭头 invoke 调用intersect vt. 横断 vi. (直线)相交, 交叉conics n.圆锥曲线论, 锥线论NURBS (non-uniform rational B-spline) Used to represent lines that are not straight or elliptical.piecewise adv.[数]分段地 planar 平面的 tangent 切线permute 序列改变 The permute panel allows you to permute node, element, point, line, surface, and component data. Use this function to exchange the axes of a coordinate system.reparam (reparameterize) 确定参数torus Used to represent a toroidal surface. 超环面cone 锥形物圆锥体 nested 嵌套的pertaining to 属于关于附属menu buttongreen Functions or executable itemsyellow Collectorsred Return or abort (异常中断)cursor n. 指针rectangular adj. 矩形的, 成直角的tetrahedral adj. 有四面的, 四面体的specular adj. 镜子的 weld vt.焊接n.焊接, 焊缝thetaadjacent 邻近的, 接近的 utility 效用有用如果一个面和超过一个面以上共同使用一条边界,就认为是连续的(“HyperMesh里称为:equivalenced”)pinhole n.针孔, 小孔toggle 一次合并一条边界(手工)–鼠标左键点击自由边可以变成共享边,点击共享边可以变成压缩边–鼠标右键点击共享边可以变成自由边,点击压缩边可以变成共享边Fillet bead 筋冲压 beam 梁edge fillet 边缘倒圆过渡圆滑部分equivalence 一次可以合并很多边界(自动)–按给定的条件查找曲面上的一对自由边界,并合成成共享边;? toggle 一次合并一条边界(手工)–鼠标左键点击自由边可以变成共享边,点击共享边可以变成压缩边–鼠标右键点击共享边可以变成自由边,点击压缩边可以变成共享边? Replace 一条边替代另一条(也是合并成一条)–合并两条带有一定间隙的自由边成一条共享边;–可以控制哪条边界保留,哪条边界移动;defeature: 面板 duplicates: 重复面–查找并删除重复面quick edit : 面板filler surf:填补曲面–在自由曲面边界上,选择一条线来自动修补丢失的面。
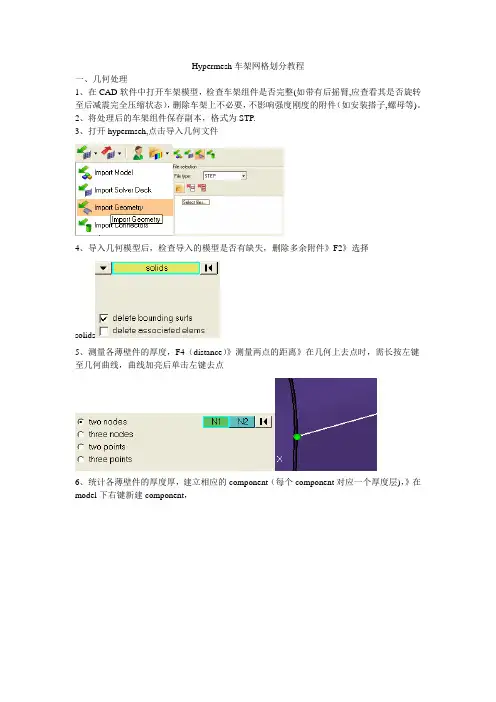
Hypermesh车架网格划分教程一、几何处理1、在CAD软件中打开车架模型,检查车架组件是否完整(如带有后摇臂,应查看其是否旋转至后减震完全压缩状态),删除车架上不必要,不影响强度刚度的附件(如安装搭子,螺母等)。
2、将处理后的车架组件保存副本,格式为STP.3、打开hypermseh,点击导入几何文件4、导入几何模型后,检查导入的模型是否有缺失,删除多余附件》F2》选择solids5、测量各薄壁件的厚度,F4(distance)》测量两点的距离》在几何上去点时,需长按左键至几何曲线,曲线加亮后单击左键去点6、统计各薄壁件的厚度厚,建立相应的component(每个component对应一个厚度层),》在model下右键新建component,可根据厚度命名如t2或shell2等;同时在新建component界面建立对应属性propetry及材料matrial,建立材料matrial时,选择Card image为MAT1,点击creat material,进入card,输入参数E弹性模量、NU泊松比、RHO密度(点击参数位置时,出现的参数默认为铁的属性、铝的材料属性为E:7.0e4、NU:0.33、RHO:2。
7e—9(hypermesh的默认单位为t、mm、s));属性propetry时,选择Card image为pshell(pshell为壳单元属性,psolid为实体单元属性(用于不规则模型的网格属性),pbeam为梁单元属性(用于模拟前减震器和后摇臂的bar单元),prod为杆单元属性(用于后减震器的rod单元)),点击craet进入crad,输入T参数即厚度。
建立各相应component后,右键右侧色标改变component的颜色,以区分各个层。
7、对车架模型的薄壁件抽取中面,》midsurface》auto》surfs》选取各管件及钣金,点击extract 抽取中面,中面将自动保存在新建的Middle surface的层里.8、将Middle surface里的曲面放进之前建立的厚度component里:》organize》collectors》surfs》选择曲面》在dest里选择相应的component,点击move。
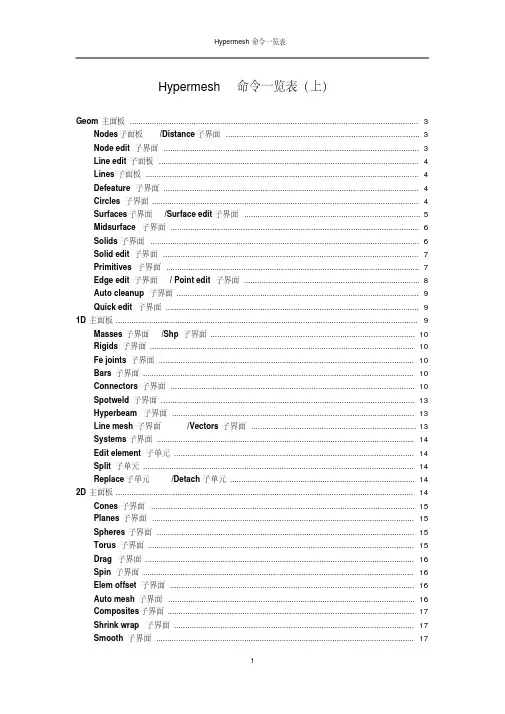
Hypermesh 命令一览表(上)Geom主面板 (3)Nodes子面板/Distance子界面 (3)Node edit 子界面 (3)Line edit子面板 (4)Lines子面板 (4)Defeature 子界面 (4)Circles 子界面 (4)Surfaces子界面/Surface edit子界面 (5)Midsurface 子界面 (6)Solids 子界面 (6)Solid edit 子界面 (7)Primitives 子界面 (7)Edge edit 子界面/ Point edit 子界面 (8)Auto cleanup 子界面 (9)Quick edit 子界面 (9)1D主面板 (9)Masses 子界面/Shp 子界面 (10)Rigids 子界面 (10)Fe joints 子界面 (10)Bars 子界面 (10)Connectors 子界面 (10)Spotweld 子界面 (13)Hyperbeam 子界面 (13)Line mesh 子界面/Vectors 子界面 (13)Systems 子界面 (14)Edit element 子单元 (14)Split 子单元 (14)Replace子单元/Detach子单元 (14)2D主面板 (14)Cones 子界面 (15)Planes 子界面 (15)Spheres 子界面 (15)Torus 子界面 (15)Drag 子界面 (16)Spin 子界面 (16)Elem offset 子界面 (16)Auto mesh 子界面 (16)Composites子界面 (17)Shrink wrap 子界面 (17)Smooth 子界面 (17)1Quality index 子界面 (17)Elem cleanup 子界面 (17)3D 主面板 (18)Solid map 子界面 (18)Linear solid子界面/ Solid mesh 子菜单 (18)Tetramesh子界面 (19)Geom 主面板Nodes 节点Lines 线Surface 曲面Solid 实体Quick edit 快速编辑Node edit 节点编辑Line edit 线编辑Surface edit 曲面编辑Solid edit 实体编辑Edge edit 边编辑Temp nodes 临时节点Circles 圆Defeature 简化几何模型Primitives 基本体Point edit 点编辑Distance 距离Length 长度Midsurface 中间面Auto clean up 自动清理Nodes 子面板Distance 子界面Node edit 子界面Type in 输入Create node创造节点Create point 创造点Reject 取消Pick geom. 在几何体上建点On line 在线上建点Number of nodes节点个数Bias intensity 偏置At point 在点上建立节点Between 两点之间Number of nodes建立几个节点Bias intensity 偏置On plane 在面上建立节点Two nodes 两个节点的距离Distance 距离Xdist X 方向的距离Ydist Y 方向的距离Zdist Z 方向的距离Angle 节点之间的角度Nodes between 两点之间放置几个节点Three nodes 三个节点Circle center圆心Two points 两个点的距离Three points 三个点Associate关联Tolerance 公差Move node 移动节点Step size 移动尺寸大小Place node 放置节点Destination surf目标曲面Node to place节点到另一个地方Remap 重映射Node list 节点目录Line edit 子面板Lines 子面板DDefeature 子界面Circles 子界面Center & radius 圆心& 半径Circle 圆Radius 半径Offset 偏移量Points & vector 点& 向量Three points 三个点Find center 寻找中心Align node 对齐节点Combine 合并Smooth 光滑Split at point 指定点分割Split at joint 在连接处分割Split at line 用线分割Cut line 剪切线Split at plane 用面分割Smooth line 使线光滑Smooth corners 平滑转角Min tangentangel 最小切线角度Extend line 延长线Follow curvature 原有曲率From nodes 通过节点Linear 线性的Offset 偏移Offset by midline 通过中线偏移From surf edges 曲面边缘偏移Original component 偏移到原始组件里From features 通过特性选取Ignore element normal 忽略法向单元Break angle 打断角度Feature angle 特性角度At intersection 交集处Surfs with plane 面上的曲面Elements with plane 面上的单元Line with plane 面上的线Smooth lines 光滑线At tangent 切线Check points 检查点Fillets 圆角Radius 半径Trim original lines 修剪线段Pinholes 小孔Surf fillets 曲面倒角Diameter 直径Surf fillets 曲面倒角Find fillets by profile通过轮廓选取倒角Find fillets in selected 在选择的部分选取倒角Edge fillets 边倒角Trim-intersect 修剪相交Duplicates 复制Cleanup tolerance 清除公差Symmetry 对称面Find symmetry 寻找对称Reorganize 重组Delete positive 删除当前Delete negative 删除复制体Surfaces 子界面Surface edit 子界面Trim with nodes 通过节点修剪Multiple node 多个节点Node normal to edge 矢量节点到边界Trim with lines 通过线修剪Along a vector 沿着矢量Entire surface 全部的曲面Keep line Endpoints 保持线的终点All attached surface 所有接触面Trim with surfs/plane 用曲面/平面修剪With plane 用平面With surfs 用曲面Self intersectingsurfs 自定义曲面Untrim 还原修剪At cursor手动选取Alltrim lines of surfs所有曲面上的修剪线Internal trim lines 内部修剪线Offset 偏移Disjoint offset 部分偏移Remove degenerations 移除ExtendCross Extension 同过延伸使交叉Extend selected surf edges延伸选择的曲面边界Shrink 缩放Ruled 规则面Auto reverse自动翻转Spline /filler 样条线/ 填充线Auto create (free edges only )自动创建(自由边)Skin 蒙皮Keep tangency 相切Drag / spin 拉伸/ 旋转Drag along vector 沿着矢量拉伸Drag along line 沿着线拉伸From FE 通过单元Auto detect features 自动检查特性Mesh-based autotolerance网格自动调整公差Surface complexity 曲面复杂度Split by components 通过组件分割Associate nodes 关联节点Fillets 圆角auto select whole edge自动选择整个边界Pick angel 拾取角度Radius 角度Midsurface 子界面Solids 子界面Auto midsurface 自动抽取中间面Closed solid 闭合实体Extract 抽取Extraction options 提取选项Sort 分类Surface pair 配对曲面Combine withadjacentplates连接与之相邻的板Combine all adjacent plates 连接所有相邻的板Result in middle surface comp结果保存在中面组件中Quick edit 快速编辑Target type目标样式Point to offset 指定偏移量Target location 目标位置Pilot point Assign target 赋值目标Point to offset指定偏移量Accept target 接受目标Pilot point Remove target 移除目标Replace edge 替代边缘Retained edge要保留的边缘Edge to move 要移动的边界Extend surface 延伸曲面Surfaces to extend 延长曲面Max extension distension 最大移动距离View thickness 查看厚度Show surfaces thickness 观察曲面厚度Set thickness 设置厚度Bounding surfs 曲面边界Auto select solid surfaces 自动选择实体曲面Surfs component 保存到曲面组件中Drag along vector 沿着向量拖动Merge solids at shared edges 合并重合实体边界Drag along normal 沿着法向拖动Drag along line 沿着线拖动Frame mode 框架模式Reference node 参照节点Transformation plane 变换平面Solid edit 子界面Primitives 子界面Spin 旋转Trim with nodes 通过节点修剪Extend trimmer 延伸修剪Trim with lines线修剪With cut line 通过剖切线With bounding lines通过边界线Drag a cut line 手动画剖切线With sweep lines 通过扫率曲线Sweep to 选择曲线Trim with plane/surf 平面/曲面修剪With plane 通过面With surfs 通过曲面Merge 合并To be merged 选取合并的实体Merge by removal 通过分割面合并实体Remove scratches删除刮伤Detach 分离To Detach 要分离的实体Boolean 布尔运算Operating type 操作类型Operating 具体操作Square/block 正方形/块Cylinder/cone 圆柱体/圆锥Full cone 整个圆锥Partial cone 部分圆锥Botton center 底面中心Botton center 底面中心Normal vector法向量Normal vector法向量Top radius 顶部半径Major vector 主向量Base radius 根部半径Start angle 起始角度Height 高度End angle 终止角度Axis ratio 轴比率By center and radius 通过中心和半径For partial sphere部分球体For 4 nodes sphere 通过四点创建球体Theta begin 起始角度Edge edit 子界面Point edit 子界面Sphere 球体Theta end 终止角度Phi begin 起始直径Phi end 终止直径Torus 圆环Minor radius 内环半径Major center 外环中心Major radius 外环半径Minor center 内环中心Add 增加At cursor 光标选取Suppress 废除Multiple points多重边界Break angle 打断角度Replace 替代Move point 去除的点Retained point 保留的点Release 释放Project 投影Points to edges 点投影到线Points to surfs 点投影到曲面Distance tolerance 距离公差Angle tolerance 角度公差Internalpointsonto its surfs 内部点映射到曲面Toggle 忽略At cursor 光标选取Cleanup tolerance 公差Suppress 压缩Break angle 打断角度Replace 替代Move edge 要移动的边Retained edge 要保存的边Equivalence 合并Equiv across comps通过组件合并Equiv free edgesonly 仅合并自由边Unsplit 清除分割Multiple edges 混合边界Edge fillets 边界倒角Min radius 最小半径Max radius 最大半径Min angle 最小角度Trim-intersect 修剪相交Close orphan 关闭孤行Angle surfs 曲面角度Offset surfs 偏移曲面Min filletAuto cleanup 子界面Quick edit 子界面1D 主面板By feature 通过特性最小倒角Max fillet 最大倒角Angel vertex 顶点角度Shape ratio 形状比例Min edge 最小边缘Topology cleanup parameters 拓扑清理参数Use currentparameters 使用当前参数Elements quality criteria 元素质量标准Use current criteria 使用当前标准Split surf-node 通过节点分割曲面Adjust/set density 调整/创建密度Split surf-line通过节点和目标线分割曲面Replace point 合并点Washer split 偏置分割线Add/remove point 添加/删除点Unsplit surf 合并分割曲面Add point on line 在线上增加点Toggle edge 忽略自由边Release point 释放点Filler surf 曲面倒角Project point 投影点Delete surf 删除曲面Trim-intersect 切除相交Masses 集中质量Bars 梁单元Connectors 连接器Line mesh 线性网格Edit element 编辑单元Fe joint 铰单元Rods 杆单元Spotweld 点焊单元Linear 1d 一维线性Split 分割Sph 球Rigids 刚性单元Hyperbeam Hyper 梁Replace 替代Rbe3 橡胶单元Detach 分离Springs 弹簧单元Order change 改变阶次Gaps 间隙单元Vectors 向量Config edit 配置编辑Systems 坐标系Elem types 单元类型Masses 子界面Shp 子界面Rigids 子界面Fe joints 子界面Bars 子界面Connectors 子界面Organize 管理Spot焊点Add links增加连接Compare比较Find 查询Bolt螺栓Unrealize不真实Quality质量Mask 隐藏Seam 缝焊Delete 删除Area 面连接Translate 移动Apply mass 施加质量Numbers 数量Fe absorb FE吸附Renumbers从编号二级子界面OrganizeCollectors 集合Dest component 目标组件Includes 包括Dest 目标Create 创造Mass质量Property 属性Update 更新System系统Simple cubic简单的立方体Pitch边长Material density材质密度Create创建Independent固定点Update更新Dependent连接点Attach dependent nodes as a set连接独立的点做设置Dof自由度Connectivity连接性Switch转换Attach/detach set连接/分离设置Combine合并Combine rigids with合并刚性单元通过Create 创造Joint type 连接类型Orientation 定位Update 更新Spherical 球形的Bar2二维梁Pins aBar3 三维梁Orientation/offsets in basic 简单的定位/偏移Update 更新Offset a a 偏移二级子界面Mask二级子界面find二级子界面translate 二级子界面deleteGlobal system 坐标系统Magnitude 偏移量二级子界面renumberSingle 单个Start with从~~开始Increment by 增加到二级子界面spotSpot 焊点Location位置Mesh independent独立网格Connect what与~连接Non-normal projection非均匀投影Creat 创建Tolerance公差No systems无系统Realize 实现Add location nodes as line 增加位置节点产生线Edit 编辑Spacing 间距End offset 末端偏移Retain line 保持线二级子界面boltBolt 螺栓Location位置Hole diameter孔直径Connect what与~连接Use dynamic vector使用动态矢量Creat 创建Tolerance 公差Mask 隐藏Reverse显示与隐藏颠倒Unmask 取消隐藏Reverse all所有都相反状态Mask not shown隐藏不显示Unmask all全部显示Reject放弃Find entities查找对象Find attached查找连接Attached to连接到Between两者之间Delete associated solids删除相关的实体Delete entity删除实体Delete associated elems删除相关的单元Delete model删除模型Realize 实现Elems to current comp 创建单元到当前组件中中二级子界面seam Seam 缝焊Location 位置Mesh independent 独立网格Connect with 与~连接Creat 创建Tolerance 公差Realize 实现Elems to current comp 创建单元到当前组件中Edit 编辑Params 参数Spacing 间距End offset 末端偏移Group 组Connect rule 连接规则二级子界面area Area 面Location 位置Mesh independent 独立网格Connect with 与~连接Non-normal projection 非均匀投影Creat 创建Tolerance 公差No systems 无系统Realize 实现Elems to current comp 创建单元到当前组件中Edit 编辑Mapped type 映射类型Size and bias 尺寸和偏移量Free type 自由样式Element size 单元尺寸二级子界面Apply mass 二级子界面Add links Location 位置Add links 增加连接Connect when 连接时间Connect what 与~~连接Re-connect rule 重新连接的规则Location 位置Mass type 网格类型Connect method 连接方法Distribution 分布Connect what 与~~连接Search tolerance 查询公差二级子界面QualitySpotweld 子界面Hyperbeam 子界面Shell section 壳截面Merge tolerance 合并公差Cross section plane 通过界面Create node at centroid 创建节点在图心Plane base node 平面基准点Create node at shear center 创建节点在剪切中心Part generation 产生部分Solid section 实体截面Analysis type 分析类型Standard section 标准截面Standarad section library 标准截面数据库Standarad section type 标准截面形式Generic section 普通截面Edit section 编辑截面Plot centroid 显示型心Review sections 审查截面Shear center 切变中心Line mesh 子界面Vectors 子界面Connectors 连接Preview duplicates 预览重复单元Preview combine 预览合并Remove duplicates 移除重复单元Projection check 投影校核Find too long 寻找太长的1D elems 1D 单元Length 长度3D elems 3D 单元Angle 角度Jacobian 雅克比Using geom. 使用几何All surfs 所有曲面Element config 单元配置Weld location 焊接位置Using nodes 使用节点Without systems 无系统Using elems 使用单元Attach to shell elems 附在壳上的单元Switch nodes 转换节点Element size 单元格大小Segment is whole line 整个线段分段Peoperty 性质Element config 单元配置Create 创建Vector update method 矢量修正方法Magnitude 量Update 更新Global system 坐标系统Systems 子界面Edit element 子单元Split 子单元Replace子单元Detach子单元2D主面板Planes 平面Ruled规则面Connectors连接器Automesh自动划分网格Edit element编辑单元Cones 圆锥Spline样条线HyperlaminateHyper薄板Shrink wrap收缩翘曲Split分割Spheres 球体Skin三角形Composites复合材料Smooth光滑Replace替代Torus 圆环Drag拉伸Qualityindex质量指标Detach分离Create by axis direction 通过轴方向创建create by node reference通过参照节点创建Rectangular 矩形Assign 赋值Set reference设置参考Set displacement 设置位移Material orientation 定义材料Material orientationalmethod定义材料方法Create创建Plot绘图Tria三角形Quad正方形Tetra四面体Pyramid棱锥Penta五面体Hex六面体Combine合并Combine to quad合并成正方体Split分割Displayed elems显示单元Cleanup清理Plate elements 板单元Split all sides 分割所有的边Solid elements 实体单元Split into hexas 分割成六面体Hexa elements 六面体单元Two pentas 二个五边形Refine elements 改善单元体Refine to target element size 改善目标单元的尺寸Target element edge length 目标单元边界长度Replace 移动的点Equivalent 等价With不动的点At mid-point在混合节点Detach分离Detach elements分离单元Detach from从~中分离Spin 旋转Elem cleanup 单元清理Order change 改变阶次Line drag 拉伸Config edit 配置编辑Elem offset 单元偏置Elem types 单元类型Cones 子界面Full cone 完整的圆锥Botton center 底面中心Mesh, keep surf 划分网格,保留曲面Normal vector法向量Radius 半径Top radius 顶部半径Ratio 比率Height 高度User controlled 自定义Major radius 外环半径Start angle 起始角Cone 圆锥End angle 终止角Planes 子界面Spheres 子界面Torus 子界面Trimmed 修剪Mesh, keep surf划分网格, 保留曲面Calculate plane估算面Square 正方形Full sphere整个球Mesh, keep surf 划分网格,保留曲面Four points 四个点画球Radius 半径User controlled 自定义Theta begin 起始角度Theta end终止角度Phi begin 起始直径Phi end 终止直径Full torus 整个圆环Center中心Mesh, keep surf 划分网格,保留曲面Normal vector法向量Minor radius 内环半径User controlledMajor vector主向量Major radius 外环半径Drag 子界面Spin 子界面Elem offset 子界面Connectors 子界面参照1D Connectors Auto mesh 子界面自定义Minor start 内环起始角Three points 三点确定Major center 外环中心Minor end 内环结束角Minor center 内环中心Major start 外环起始角Minor radius 内环半径Major end 外环结束角Drag geoms 拉伸几何体Distance距离Mesh, keep surf 划分网格,保留曲面Drag elems 拉伸单元Bias style偏载类型Bias intensity 偏载强度Spin geoms 旋转几何体Angle 角度Mesh, keep surf 划分网格,保留曲面Spin elems 旋转单元On spin Bias style 偏载类型Bias intensity 偏载强度Solid layers 实体层Elems to offset 单元偏移Number of layer层的数量Initial offset 初始偏移量Shell layers壳层Tolal thickness 总体厚度Linear or no biasing 线性或不偏载Shell offset 壳偏移量Along geom to follow沿着几何偏移Bias intensity 偏载强度Elements to current comp 创建创建单元到当前组件中Thicken shells加厚壳CFD corners CFD 角Shells are on the midsurfaces壳加在中间层Elements size 单元尺寸Elems to surf component 创建单元到面组件Composites 子界面Shrink wrap 子界面Smooth 子界面Quality index 子界面Elem cleanup 子界面Size and bias 尺寸和偏差Mesh type 单元类型First order 一阶Break connectivity 打断当前连接Previous settings 先前的设置Link opposite edges 连接对面的边QI optimize QI 优化Use current criteria 使用当前条件Smooth across common edges with feature angle光滑有特性角度的共同边Edge deviation 边界偏差Min elem size 最小单元尺寸Max elem size 最大单元尺寸Surface deviation曲面偏差Max angle 最大角度Closed volume proximity封闭附近的体积Mesh type 网格形式Free edge deviation 自由边的偏差Rigid body mesh 刚性体网格Max feature ang 最大的特性角度Material orientation 指定材料Material orientational method 指定材料方法Ply directions厚度方向Tight 紧的Element size 单元尺寸Loose 松散的Generate solid mesh 产生实体网格Mesh orientation 网格方向Plates 板Iteration迭代次数Anchor Solids 实体Autodecide 自动决定Min size 最小尺寸Place node 放置节点Max size 最大尺寸Swap edge 交换边界Aspect ratio 长宽比Node optimize 节点优化Warpage 翘曲Element optimize 单元优化Skew 扭曲度Jacobian 雅克比Fix folded elems ,angles 修复折叠的单元,角Use surrounding elems 使用周围的单元Reduce tria elems 减少三角单元Use current criteria 使用现有标准QI smooth elems with targetQI 光滑单元的目标Feature angle 特征角Fix elems failing QI check 修复单元QI 故障检查Edit element、split、replace、detach参照1D 3D 主面板Solid map 实体映射Drag拉伸Connectors链接Tetramesh四面体格划分Edit element编辑单元Linear solid 线性实体Spin旋转Smooth光滑Split分割Solid mesh 实体网格Line drag拉伸Replace替代Elem offset单元偏置Detach分离Order change改变阶次Config edit配置编辑Elem types单元类型Solid map 子界面General 普遍方法Source geom起始几何Along parameters参数设置Dest geom目标几何体Along bias style偏置形式Along geom沿着几何体Elem size单元尺寸Line drag 沿着线拉伸Show solidmap mesh显示实体网格Linear线性Linear solid 线性实体Apply orthogonality to along 相交延长Ends only 终止处One volume 一个实体Smooth dest 目标光滑Multi solids 混合实体Interactive互动Stop meshing on bad jacobian在不好的雅可比处停止划分网格Source shell壳源Previous setting先前的设置Linear solid子界面Solid mesh 子菜单Alignment 对齐方式Distribute layer 分布的层Density 密度Bais intensity偏载强度Start region开始区域End region结束区域Connecting连接Uniform mesh统一的网格Drag、Spin、Line drag、Elem offset、Connectors参照2D Tetramesh子界面Tetra mesh 四面体网格Select trias/quads to tetra mesh选择三面体/四面体进行四面体网格自动划分Optimize mesh quality优化网格质量No fixed trias/quads不修复三面体/四面体Standard标准Tetra remesh四面体网格重新自动划分CFD mesh CFD 网格Fixed with boundary layer修复边界网格Number of layers层的数量Comps组件First layer thickness第一层的厚度Single thickness单一厚度Growth rate增长率Float w/o boundary layer浮动w/o边界层Simple transition:ratio单个旋转比Remesh重新划分网格Volume tetra 四面体体积Enclose volume闭合的实体Match existing mesh匹配存在的网格Elems to current comp创建单元到当前组件中Smooth参照2D。
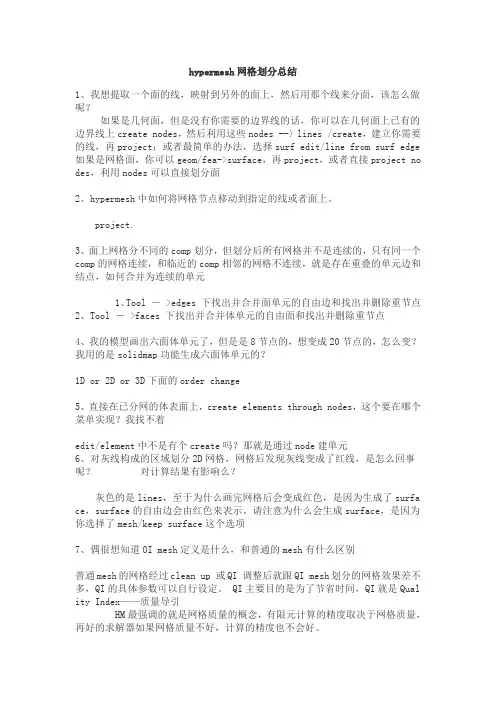
hypermesh网格划分总结1、我想提取一个面的线,映射到另外的面上,然后用那个线来分面,该怎么做呢?如果是几何面,但是没有你需要的边界线的话,你可以在几何面上已有的边界线上create nodes,然后利用这些nodes --〉lines /create,建立你需要的线,再project;或者最简单的办法,选择surf edit/line from surf edge 如果是网格面,你可以geom/fea->surface,再project,或者直接project no des,利用nodes可以直接划分面2、hypermesh中如何将网格节点移动到指定的线或者面上。
project.3、面上网格分不同的comp划分,但划分后所有网格并不是连续的,只有同一个comp的网格连续,和临近的comp相邻的网格不连续,就是存在重叠的单元边和结点,如何合并为连续的单元1、Tool - >edges 下找出并合并面单元的自由边和找出并删除重节点2、Tool - >faces 下找出并合并体单元的自由面和找出并删除重节点4、我的模型画出六面体单元了,但是是8节点的,想变成20节点的,怎么变?我用的是solidmap功能生成六面体单元的?1D or 2D or 3D下面的order change5、直接在已分网的体表面上,create elements through nodes,这个要在哪个菜单实现?我找不着edit/element中不是有个create吗?那就是通过node建单元6、对灰线构成的区域划分2D网格,网格后发现灰线变成了红线,是怎么回事呢?对计算结果有影响么?灰色的是lines,至于为什么画完网格后会变成红色,是因为生成了surface,surface的自由边会由红色来表示。
请注意为什么会生成surface,是因为你选择了mesh/keep surface这个选项7、偶很想知道OI mesh定义是什么,和普通的mesh有什么区别普通mesh的网格经过clean up 或QI 调整后就跟QI mesh划分的网格效果差不多,QI的具体参数可以自行设定。
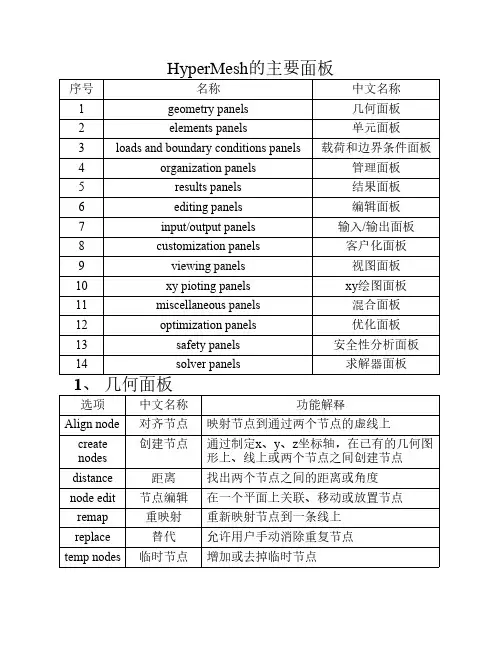
HyperMesh的主要面板序号名称中文名称1geometry panels几何面板2elements panels单元面板3loads and boundary conditions panels载荷和边界条件面板4organization panels管理面板5results panels结果面板6editing panels编辑面板7input/output panels输入/输出面板8customization panels客户化面板9viewing panels视图面板10xy pioting panels xy绘图面板11miscellaneous panels混合面板12optimization panels优化面板13safety panels安全性分析面板14solver panels求解器面板1、几何面板选项中文名称功能解释Align node对齐节点映射节点到通过两个节点的虚线上create nodes 创建节点通过制定x、y、z坐标轴,在已有的几何图形上、线上或两个节点之间创建节点distance距离找出两个节点之间的距离或角度node edit节点编辑在一个平面上关联、移动或放置节点remap重映射重新映射节点到一条线上replace替代允许用户手动消除重复节点temp nodes临时节点增加或去掉临时节点Nodes(节点)子面板的选项及功能选项中文名称功能解释circles圆创建圆或圆弧fillets倒角创建或删除两条线之间的倒角intersect相交一个平面与一个有限元模型相交、从而创建一条或多条线length长度确定一组已选择的线的长度line edit线编辑组合线、在一个点、一个交点、一条线或一个平面处分割线,或对线进行平滑处理lines线通过拾取节点创建线section cut截面切除通过一组线切除一个平截面tangents相切在一个节点和线上创建切线,或在两条线之间创建切线reparam重置参数浓缩线数据以提高处理速度Lines(线)子面板的选项及功能选项中文名称功能解释cones圆锥面创建一个曲面或为圆锥面、圆柱面创建网格defeature除掉特征去除曲面特征drag拖动创建一个曲面或通过拖动节点、线或单元的方式创建网格几何清理包工具帮助准备划分网格的曲面几何geomcleanupintersect相交一个平面与一个有限元模型相交、从而创建一条或多条线.line drag线拖动创建一个曲面或通过沿着一条线拖动节点、线或单元的方式创建网格planes平面通过平面上线的界限创建一个平的曲面或创建网格ruled规则面通过没有联系的节点或线创建一个曲面或创建网格skin蒙皮通过一系列线的蒙皮创建一个曲面或创建网格spheres球面创建一个球面或创建球面网格spin旋转面通过绕某一轴旋转节点、线或单元创建一个曲面或创建网格spline样条面通过线创建一个曲面或创建网格surf lines面上的线改变面的显示线的数量surface edit曲面编辑使用线、曲面剪切线或曲面,或创建曲面填充模型的间隙torus螺旋面创建一个螺旋形的曲面或网格Surfaces(曲面)子面板的选项及功能2、单元面板选项中文名称功能解释Bars梁单元创建或更新bar2或bar3单元Beam xsect梁截面计算梁单元截面特性Config edit配置编辑改变已存在单元的特性Edges边发现自由边和边上的等效节点Features特征提供一个显示工具以查看复杂模型的边Fe joints铰单元创建、查看或更新连接铰Gaps间隙创建、查看或更新间隙单元Hyperbeam Hyper 梁在进入Hyper梁模式之前定义梁截面特性Linear 1d线性一维创建一维单元绘图单元Line mesh线网格在节点之间或沿着一条线创建一维单元Masses集中质量创建或更新质量单元Rbe3RBE3单元创建或更新RBE3单元Rigids刚性单元创建或更新刚性或刚性连接单元Rods杆单元创建或更新杆单元Spotweld点焊单元创建或更新点焊单元spings弹簧单元创建或更新弹簧单元One-dimensional(一维单元)子面板的选项及功能选项中文名称功能解释automesh自动网格在曲面上交互式或自动划分网格cones圆锥创建圆锥、圆柱曲面和网格config edit配置编辑改变已有在单元的配置detach分离从连接单元中分离单元d rag拖动通过拖动节点、线或单元创建一个曲面或网格edit element编辑单元创建、组合和分割单元elem offset单元偏置基于板单元或壳体单元,通过在板壳单元法线方向的偏置,创建实体单元、多层板单元或壳体单元elem types单元类型选择和改变已有的单元模型faces面发现实体单元自由面和等效的节点line drag线拖动通过沿着一条线拖动节点、线或单元创建一个曲面或网格order change改变阶次改变单元的阶次(一阶和二阶单元的切换)penetration穿透为初始穿透问题检查组设置planes平面通过平面上的线创建一个平面或网格ruled规则通过不连在一起的节点或线创建一个平面或网格skin蒙皮通过一系列线创建一个平面或网格smooth平滑提高面网格的单元质量spheres球面创建球面或网格spin旋转通过沿着一个向量旋转节点、线或单元创建一个曲面或网格spline样条通过样条线创建曲面或网格split分割分割单元成为预先设置的模式torus圆环创建环面或网格shells(壳单元)子面板的选项及功能选项中文名称功能解释Config edit配置编辑改变已有在单元的配置Detach分离从连接单元中分离单元Drag拖动通过拖动节点、线或单元创建一个曲面或网格Edit element编辑单元创建、组合和分割单元Elem offset单元偏置基于板单元或壳体单元,通过在板壳单元法线方向的偏置,创建实体单元、多层板单元或壳体单元Elem types单元类型选择和改变已有的单元模型Line drag线拖动通过沿着一条线拖动节点、线或单元创建一个曲面或网格Linear solid线性实体在平面单元的两个组之间创建实体单元改变阶次改变单元的阶次(一阶和二阶单元的切换)OrderchangeSmooth单元光滑提高曲面单元质量Solid map实体映射通过定义原始面、目标面和引导面而创建实体Solid mesh实体网格在由边线定义的实体内创建实体网格Spin旋转通过沿着一个向量旋转节点、线或单元创建一个曲面或网格Split分割单元分割单元成为预先设置的模式tetramesh四面体格自动划分填充封闭曲面围成的实体生成一阶或二阶四面体实体单元Solids子面板的选项及功能3、载荷和边界条件面板选项中文名称功能解释accels加速度创建或更改加速度blocks快创建或修改快实体constraints约束创建或更改约束或节点上的强迫位移constactsurf约束面创建或修改接触面实体equations方程创建、观看和更改方程flux流量创建或更新节点流量载荷forces力创建或修改力interfaces接触界面创建和修改一个接触和滑移面load steps载荷步创建和更新载荷集合器集合load types载荷类型为新模型选择载荷器类型或更改在模板文件中已有的载荷类型moments力矩创建或更改力矩penetration穿透检查初始穿透问题pressures压力创建或更改压力temperatures温度创建或更改温度vectors向量创建或更改向量velocities速度创建或更改速度载荷和边界条件面板4、管理面板选项中文名称功能解释assemblies装配创建组件集合collectors集合器创建组合数据在一起的组件entity set实体设置创建一批节点或单元interfaces界面创建和修改定义接触界面或滑移面的界面organize管理在组件之间移动或复制实体output block输出块创建或修改输出结果的实体块rename重新命名改变集合器的名称renumber重新编号实体重新编号改变数据库中的已命名实体的阶次reorder重新定义阶次super elems超单元赋予节点到一个超单元中和显示一个超单元的节点管理面板5、结果面板选项中文名称功能解释apply result施加结果施加结果分析数据到模型中的实体上contour云图创建结果的云图deformed变形在位移结果基础上创建变形图replay重新显示重新显示以前保存的动画序列transient瞬态结果从瞬态分析结果中创建动画vector plot绘向量图从向量结果中绘出向量图结果面板6、编辑面板选项中文名称功能解释align node对齐节点映射节点到通过两个节点的虚线上apply result应用结果在节点上显示位移结果check elems检查单元检查单元质量,检查翘曲(wrap)、长宽比(aspect)、扭曲度(skew)、夹角(angles)、长度(length)、雅可比(jacobian)、连接关系(connectivity)和重复单元(duplicates)config edit配置编辑改变已有单元的配置convert转换在不同求解器之间转换数据detach分离从连接单元中分离单元delete删除从数据库中删除数据dependency依属寻找有多个自由度(DOF)约束的节点distance距离查询节点之间的距离和角度edges边寻找自由边和边上的等效节点edit element编辑单元创建、合并和分割单元elem types单元类型选择和改变已存在的单元类型faces面发现实体单元自由面和等效节点features特征提供一个显示工具以观看复杂模型的边Find寻找在数据库中寻找实体(编号)line edit线编辑组合线,在一个点、交点、线或平面处分割线,或对线进行平滑处理length长度确定一组已选择线的长度mask隐藏从显示的图形中隐藏实体node edit节点编辑关联、移动或放置节点到一个平面上normals法线方向显示单元或曲面的法线方向numbers编号显示实体的编号order change改变阶次改变单元的阶次(一阶和二阶单元切换)penetration穿透为初始穿透问题检查组设置permute序列改变转换实体的x、y、z轴数据position定位通过选择节点定位实体project投影投影实体到一个平面、向量或曲面上reflect映射关于一个平面映射remap重新映射重新映射节点到一条线上renumber重新编号重新编号reparam重置参数浓缩线数据以提高显示速度replace替代等效节点rotate旋转关于一个向量旋转scalc缩放更改实体的尺寸smooth光滑提高曲面上网格的质量split分割将单元分割成指定的模式surface edit曲面编辑用线或曲面剪切曲面、分割面上的边、从曲面边创建线和去除剪切线translate移动沿一个向量移动实体编辑面板7、输入/输出面板选项中文名称功能解释filesExport输出将hypermesh数据输出为求解器数据格式Hm file Hm 文件保存和提取hypermesh数据库Import输入输入CAD数据到hypermeshResults结果指定结果文件template模板指定模板文件Global总体指定模板文件、当前组件、单元阶次和尺寸Card卡片允许用户选择显示在卡片面板中的实体Cntl card控制卡允许用户编辑求解器指定的数据输入/输出面板8、客户化面板选项中文名称功能解释OptiosColors颜色改变屏幕的背景颜色Graphics图形确定当前图形引擎:标准(standard)和高级(performance)Pagenames页面名定制主菜单的页面名称和标题Fonts字体改变hypermesh的文字大小Modeling建模允许确定公差、放大倍数、单元收缩比例、拾取手柄等Postscript Postscript产生Postscript图形(可以使用功能键F4)Spaceball空间球允许改变空间球设备操作的特性Build menu创建菜单重新定义hypermesh菜单系统的风格color颜色修改集合器的颜色特性客户化面板9、视图面板选项中文名称功能解释Color颜色修改集合器的颜色属性display显示对观看图形而打开和关闭集合器Find寻找在数据库中寻找实体及编号Hidden line消隐创建单元消隐和着色显示图形Mask隐藏从显示列表中隐藏实体OptionsGraphics子面板菜单配置改变hypermesh菜单尺寸、图形文字及光标大小、启动和指定宏菜单Menu config子面板Surf lines曲面的线数改变曲面显示线的数量Titles标题创建和编辑屏幕标题vis显现确定模型中的实体显示视图面板10、xy绘图面板选项中文名称功能解释Axis labels坐标轴标签编辑坐标轴标签信息Axis scaling坐标轴比例修改绘图轴比例Border边界编辑xy图的边界Curve attribs线属性创建和编辑曲线Edit curves编辑线从文件或数学表达式中创建或编辑新的或已存在的曲线Grid attribs栅格属性编辑栅格信息Grid labels栅格标签编辑栅格标签信息Integrate结合允许一条曲线成一体Legend图例编辑图形图例Plot titles绘出标题编辑图形标题Plots绘图创建新的单个或多个图,并允许选择曲线包含在图中Querycurves查询曲线允许在一条曲线上寻找一个点的x和y值Read curves读曲线允许一个ASCII文件输入一个x和y值Result curves 结果曲线允许通过一个hypermesh结果文件中提取数据创建曲线Simple math简单运算允许一条曲线上执行简单运算功能Xy绘图面板11、混合面板选项中文名称功能解释Command命令执行一个hypermesh命令文件Count统计统计数据库中的实体Fd blocks有限差分块提供进入有限差分菜单面板的入口Mass calc质量计算获得选择单元或曲面的质量、面积和体积Summary总结创建单元、载荷和特性的总结Systems坐标系统创建局部坐标系统Tags命名为实体命名Titles标题创建和编辑屏幕标题vectors向量创建一个hypermesh向量实体混合面板12、优化面板选项中文名称功能解释Consterscreen约束约束面板为定义约束Dconstraints定义约束创建约束面板允许用户为优化问题创建约束Dequations定义方程定义方程面板允许用户为约束或目标函数创建用户自定义函数Desvar link设计变量连接设计变量连接面板允许用户连接一个设计变量到其他的设计变量上Gauge规格为尺寸优化的组件选择创建一个设计变量和多个特性连接卡Objective目标目标面板允许用户为优化问题定义目标函数Obj reference目标参考目标参考面板允许用户为最小(最大)优化问题定义一个响应和它的参考值Opti control优化控制控制面板允许用户控制优化过程Opti rename优化重命名优化重命名面板允许用户单独或一次同时重新命名优化实体的标号Opti reorder优化改变阶次优化改变阶次面板允许用户改变优化实体的阶次Optistruct solver Optistruct求解器Optistruct求解器面板允许用户写出Optistruct程序输入文件,并通过单击Optistruct按钮进行求解Ossmooth提取优化结果提取优化结果面板允许用户从优化程序Optistruct、拓扑优化、形貌优化和形状优化结果提取和输入最终的设计几何图形到hypermesh中Responses响应响应面板允许用户为一个优化创建响应Shape形状形状面板允许用户进行形状优化Size尺寸尺寸面板允许用户建立和进行尺寸优化Table entries列表列表面板允许用户为定义函数时使用的约束指定值Topography形貌形貌面板允许用户设立和定义形貌优化topology拓扑拓扑面板允许用户设立和定义拓扑优化优化面板13、安全性分析选项中文名称功能解释0D(masses)0维(质量)创建和更新质量单元Check elems 检查单元检查单元质量、检查翘曲、长宽比、扭曲度、夹角、长度、雅可比、连接关系和质量单元Control vol控制体积创建控制体积Dummy假人模型允许旋转假人装配模型或指定一耳光假人装配模型的H点位置Ellipsoids椭圆体创建或修改单个或多个椭圆体和圆柱Fe joints FE连接创建、观看或更新连接Interfaces界面创建和修改界面定义接触或滑移面MBS joints MBS铰在两个局部坐标系中定义动态铰,以连接两个多体几何图形MBSplanesMBS平面创建多体分析中使用的矩形、平直面Outputblock输出块创建和更新输出请求中使用的模块Penetration初始穿透初始穿透问题检查组Rigid walls刚性墙创建和更新刚性墙Seatbelt安全带在假人模型上创建和设置安全带sensor传感器创建和编辑传感器安全性分析面板14、求解器面板选项中文名称功能解释Solver求解器允许用户在hypermesh内运行一个外部程序或指定并运行一个求解器fatigue疲劳允许用户从有限元分析中写应力、应变结果到一个外部文件中,此文件可以用来在一个支持的疲劳分析求解器中建立疲劳分析求解器面板。
HyperMesh之网格划分CAE软件在导入CAD几何模型的时候经常会遇到这样几种情况。
一、CAE软件导入几何数模时发生错误,无法导入。
这种问题可能是由于版本的限制问题,例如HyperMesh5.0不能直接导入UG18的prt文件,但5.1就可以了。
5.*不能直接导入pro/e 的数据,但6.0就可以了。
这种问题比较好解决,用CAD软件把这些几何用iges格式输出处理一下就可以了。
但这种问题也可能是几何数模中存在严重错误所致,这就需要修改模型了。
二、导入几何模型后发现有些曲面无法导入,这样模型就会缺少一些比较重要的面,或者曲面存在缝隙、重叠、错位等缺陷,对较复杂的模型这种问题是经常性的。
边界错位经常引起网格扭曲,导致单元质量不高,求解精度差。
三、导入的模型很完整,没有错误。
但是由于CAE分析和CAD设计的思想不同,会产生一些两难的问题。
CAD设计主要是为生产服务的,模型中通常会包含某些细微特征,例如曲面和边的倒圆,小孔。
进行分析时如果要准确模拟这些特征,需要用到很多小单元,导致求解时间过长。
上面第一种情况不是我想讨论的内容,第二种和第三种情况则比较复杂,因为在这两种情况下,一些在前处理方面号称自动化程度高的软件,如Ansys、Marc、Patran等都会很郁闷。
就算网格能划分出来,质量怎么保证呢?毕竟我们对计算结果的精度和计算过程的费用是有要求的。
那么怎么办?一种办法是在做网格的时候忽略这些问题,比如说遇到缺少曲面,用户可以自己设法在CAE 中做一个,毕竟简单的CAD工具还是有的。
但也只能对简单的曲面。
另外一种办法就是几何清理,不幸的是,据我所知,目前只有两种软件可以做到,HyperMesh 和I-deas,另外我注意到I-deas的帮助里提到她的几何清理功能使用了HyperMesh的专利。
关于HyperMesh的几何清理,基础内容请参考Hypermesh基础培训Day 1部分的第三章,培训材料的中文版我即将发布。
Altair软件Hyperworks10.0Hypermesh功能操作中文版张燕华译一字一句打上,不妥之处难免,还望大家批评指正中文资料optistruct指南文档(付费)碰撞关键字(控制文件)中文版(免费)Hypermesh与abaqus接口文档(免费) Hypermesh与dyna接口文档(免费)Hypermesh指南文档(免费)ANSA(网格划分部分)(免费)疲劳Ncode7.0(design life) (免费)更多软件和法规,范例资料,慢慢翻译积累资料声明资料翻译费时费力,希望能让您的学习过程感到省时,给力!我本来不想发行电子版的,传到网上可能会被复制,粘贴,so easy的事情,我就得 “被雷锋”了。
个人建议:或许您能够偶尔得到一份只言片语的资料,或者是某个方面的资料,但是如果您想得到更多更全的学习资料,建议你亲自联系我们。
比如,做碰撞的,想学习NVH,学习流体,学习疲劳,电磁场等;做汽车行业的,想看看其他行业(如航空,重工,电子产品,生命科学)主打软件是什么,比如高薪的航空工业疲劳分析工程师,一汽,泛亚,上海大众,上汽,北汽疲劳工程师主要应用Ncode(疲劳软件的鼻祖,功能最全,最强大);还有船舶行业patran软件,很多经典资料(像Patran PCL Workshop Notes)还木有中文版。
在一个或两个方面特别精通的基础上,再对其它方面熟悉,或许您会更受业内欢迎。
如果您需要更多,关于Hyperworks,ansa,MSC.patran,nastran,dytran;LS-dyna,abaqus,adams,ansys,madymo,MoldFlow,MARC, Ncode,Optistruct帮助文档中文版。
请联系:QQ:290538306邮箱:zzuzhangyanhua@很多资料国内代理公司不公开或者根本没有。
到我们这里,某些已有中文版,暂时没有的资料可以从无到有,欢迎团购,更欢迎个人。
其实各种CAE前处理的一个共同之处就是通过拆分把一个复杂体拆成简单体。
这个思路一定要记住,不要上来就想在原结构上分网,初学者往往是这个问题。
刚开始学,day1,day2,advanced training 和HELP先做一遍吧。
另外用熟24个快捷键。
做一下HELP里面的教程,多了解一些基本的概念和操作。
这样会快点入门。
划分的方法要灵活使用,再有就是耐心。
1、如何将.igs文件或.stl文件导入hypermesh进行分网?files\import\切换选项至iges格式,然后点击import...按钮去寻找你的iges文件吧。
划分网格前别忘了清理几何2、导入的为一整体,如何分成不同的comps?两物体相交,交线如何做?怎样从面的轮廓产生线(line)?都用surface editSurface edit的详细用法见HELP,点索引,输入surface edit3、老大,有没有划分3D实体的详细例子?打开hm,屏幕右下角help,帮助目录下hyperworks/tutorials/hyermesh tutorials/3D element,有4个例子。
4、如何在hypermesh里建实体?hm的几何建模能力不太强,而且其中没有体的概念,但它的曲面功能很强的.在2d面板中可以通过许多方式构建面或者曲面,在3D面板中也可以建造标准的3D 曲面,但是对于曲面间的操作,由于没有"体"的概念,布尔运算就少了,分割面作就可以了5、请问怎么在hypermesh中将两个相交平面到圆角啊?defeature/surf fillets6、使用reflect命令的话,得到了映射的另一半,原先的却不见了,怎么办呢?法1、在选择reflect后选择duplicate复制一个就可以法2、先把已建单元organize〉copy到一个辅助collector中,再对它进行reflect,将得到的新单元organize〉move到原collector中,最后将两部分equivalence,就ok拉。
基于HyperMesh实体单元网格划分运用HyperMesh 中的3D 实体单元网格划分的多种功能,介绍了几种典型几何特征的划分思路,为以后进行类似网格划分工作提供参考,同时也验证了HyperMesh 在划分实体网格方面的强大功能。
1 概述计算机辅助工程(CAE)在汽车行业应用已有很多年了,许多有限元理论及软件都得到了成熟运用。
在众多软件中美国 Altair公司的HyperMesh是其中的佼佼者。
像在板壳单元、实体单元、焊接单元等的创建,以及与其它软件的接口等方面,都能表现出良好的性能。
其中尤其是在实体单元的划分方面有其独特的优势,以下将通过几个比较典型的实例来详细说明,同时也可以为以后再进行类似工作提供解决思路。
2 实例描述2.1 座椅垫实体几何的网格划分本例将通过一套座椅垫实体网格划分来介绍在HyperMesh8.0中新增加的处理实体几何的功能。
如图1所示是一套座椅垫,原始几何只有外表面的一层壳几何,而且几何形状也不规则,在以前不能处理实体几何的时候,一般处理方法是首先几何清理,然后通过添加一些辅助面构成封闭壳体,再根据经验把大块儿体分成相对较规则的若干小块儿,最后可以运用3D子面板中的Solid map-general或Linear solid 等工具先把各个小块儿划分网格,然后再把各个小块缝合到一起。
这样做的不足是一方面需要做大量的辅助面,另一方面在划分各个小块儿时需要考虑最后缝合时的节点对应问题。
通过观察几何模型发现,虽然座椅垫几何形状不规则,但它没有局部突出或相贯的几何特征,所以可以考虑把板壳几何封闭后生成实体几何,再通过几何清理后得到如图2所示的几何体,运用3D子面板中的Solid map- volume工具,设置好相关参数后就可以自动划分出以六面体为主五面体为辅的实体网格。
而且软件自动划分的网格能够完全与几何贴合,网格质量还比较好,只需稍微调整一下后就可以全部达到网格质量要求。
现在整个过程所花费的时间比以前要节省70%以上。
Hypermesh网格划分简单介绍几何建模1,启动hypermesh2,点击Geom/create nodes面板,默认输入,点击create,在(0,0,0)处制作一个节点。
3,点击永久菜单中的f键,观察所生成的节点,在屏幕中心处有一个黄色的小圆圈4,点击Geom/circle ,选择center&radius子面板。
点击制作的节点,选中之后黄色的圆圈变为白色。
5,选择z方向为法向,选择制作的节点,这个节点由白色变为紫色。
6,在后面的指针开关中选择circle7,在radius=后面的输入框内,输入1,点击create,作一个半径为1的圆。
8,点击永久菜单中的f键,观察所生成的圆,按住ctrl键,同时按住鼠标左键,移动鼠标左键。
旋转观察所生成的圆9,点击return,退出这个面板。
2D网格的生成1,点击2D/spline,选择创建的圆2,选择keep tangentcy前面的方框,使其里面有一个对勾,3,点击keep tangentcy上面的有一个三角形的键,选择mesh ,dele surf,点击create,出现一个选择,选择yes,生成2D网格。
4,在elem density=后面的输入框中,输入14,点击elem density=左面的最下面的那个绿色的set all to5,点击屏幕左面的type面板,在生成的网格的中间出现一个四边形和一个三角形图标,6,使element type为四边形,点击旁边的set all,中间出现一个四边形图标7,点击最右面的mesh,点击smooth,点击return,生成2D网格。
点击宏菜单中的pe r3D网格的生成1,点击2D/drag,选择最右面的drag elems2,点击黄色的elems,出现一个面板,3,点击左面第一列,最下面的by collector,点击auto1 前面的方框,点击右面的select,选择刚刚创作的单元。
单元颜色变亮。
Hypermesh网格划分简单介绍几何建模1,启动hypermesh2,点击Geom/create nodes面板,默认输入,点击create,在(0,0,0)处制作一个节点。
3,点击永久菜单中的f键,观察所生成的节点,在屏幕中心处有一个黄色的小圆圈4,点击Geom/circle ,选择center&radius子面板。
点击制作的节点,选中之后黄色的圆圈变为白色。
5,选择z方向为法向,选择制作的节点,这个节点由白色变为紫色。
6,在后面的指针开关中选择circle7,在radius=后面的输入框内,输入1,点击create,作一个半径为1的圆。
8,点击永久菜单中的f键,观察所生成的圆,按住ctrl键,同时按住鼠标左键,移动鼠标左键。
旋转观察所生成的圆9,点击return,退出这个面板。
2D网格的生成1,点击2D/spline,选择创建的圆2,选择keep tangentcy前面的方框,使其里面有一个对勾,3,点击keep tangentcy上面的有一个三角形的键,选择mesh ,dele surf,点击create,出现一个选择,选择yes,生成2D网格。
4,在elem density=后面的输入框中,输入14,点击elem density=左面的最下面的那个绿色的set all to5,点击屏幕左面的type面板,在生成的网格的中间出现一个四边形和一个三角形图标,6,使element type为四边形,点击旁边的set all,中间出现一个四边形图标7,点击最右面的mesh,点击smooth,点击return,生成2D网格。
点击宏菜单中的pe r3D网格的生成1,点击2D/drag,选择最右面的drag elems2,点击黄色的elems,出现一个面板,3,点击左面第一列,最下面的by collector,点击auto1 前面的方框,点击右面的select,选择刚刚创作的单元。
单元颜色变亮。
hypermesh网格划分总结hypermesh网格划分总结-HM运用小常识1.如何在体表面提取面单元HM->TOOL->faces->find faces2.在Hypermesh中使用OptiStruct求解器的重力、离心力、旋转惯性力施加方法在HyperMesh中采用定义loadcols组件(colletors)的方式定义重力、离心力以及惯性力。
1、重力重力的施加方式在的card image中选择GRAV,然后create/edit,在CID中输入重力参考的坐标系,在G中输入重力加速度,在1、2、N3中输入重力方向向量在重力参考坐标系中的单位分量,然后返回即可2、离心力离心力的施加方式在的card image中选择RFROCE,然后create/edit,在G中输入旋转中所在节点编号,在CID中输入离心力所参考的坐标系,在A中输入旋转速度,在1、2、N3中输入离心力方向向量在离心力所参考坐标系中的单位分量,返回即可创建离心力;如果需要定义旋转惯性力,在RACC中输入旋转加速度即可,二者可以同时创建,也可单独创建。
1 / 12如果在一个结构分析中,需要同时考虑结构自身的重力和外界施加的外载荷,那么你可以按照楼主wjsgkz介绍的第一条建立重力load collector,但是外部载荷的load collector你怎么建立是同时建立在重力的load collector中吗如果是,那边有一个十分混淆的问题:在你建立重力的load collector的时候,你选择了GRAV 卡片,那么你凡是建立的该重力load collector之中的力都带有GRAV 卡片属性,这显然是不对的。
但是,如果你重新建立一个新的load collecotr,然后把外部载荷建立在其中,那么就有重力和外部载荷两个loadcollectors,但是在你建立subcase的时候你只能选择一个load collector,那么你无论选择哪一个都必将失去另外一个,这就与我们的本意相矛盾了,我们是希望同时考虑结构自重和外部载荷的联合作用下进行分析的,这个时候应该怎么办怎么获得结构同时在自身重力和外部载荷作用下的变形和应力谁知道方法1:工况组合;使用??屄卡片叠加重力载荷和其他载荷;创建一个load collector;card image选LOAD;点击create/edit;把下面的load_num_set改成你所要组合的载荷的数目;然后在上面L1,L2,L3....选中你要组合的项,前面的s1,s2,s3,,,,是载荷组合时候的权重系数。
1957.1 When to Use 3-D Elements100 ~ 200 ~ 50 3-D elements should be used when all dimensions are comparable.x ~ y ~ z Element shape – Tetra, penta, hex, pyramid Additional data from user – Nothing Element type – Solid Practical applications : Gear box, engine block, crankshaft, etc.VII3-D Meshing This chapter includes material from the book “Practical Finite Element Analysis”. It also has been reviewed and has additional material added by Matthias Goelke.何时采用3D 网格x,y,z 三个方向的尺寸相差不太大单元形状——四面体、楔形、六面体、金字塔形不需要用户提供其他数据(1D 单元需要截面形状,2D 单元需要厚度)网格类型——实体实际应用——齿轮箱、发动机缸体、曲轴等196 6 cylinder crankcase brick mesh Crank Shaft Tetra Meshing (Image Source : Altair Calendar 2006, Courtesy : Bharat Forge Ltd. )3-D Element types :Tetra Penta or Wedge Hex or Brick PyramidLinearTetra 4Linear Penta 6Linear Hex 8Tetra 10Linear Pyram 5 Not supported byall software3-D Elements7.2 DOFs For Solid Elements 2-D thin shell and 1-D beam element supports 6 dofs, but all solid elements have only 3 translationaldofs (no rotational dof) i.e. a 10 noded tetra element has total of 10 x 3 = 30 dofsWhy does a solid element have only 3 translational and no rotational dofs (Physicalinterpretation)?Consider a piece of paper (2-D geometry) or long steel scale (1-D geometry). It could be easily bent andtwisted (rotational dof). But now consider a solid object like a duster or a paper weight. It could not实体单元的自由度1D 、2D 单元都具有6个自由度,但是3D 实体单元只有3个移动自由度(没有转动自由度)设想一张纸(2D 几何体)或长钢尺(1D 几何体),很容易弯曲和扭转。
但是对于像黑板擦或者镇纸这样的3D 几何体,通常不会承受太大的弯曲或扭转,因此实体单元只具有3个移动自由度而没有转动自由度。
with 3 translational dofs and no rotational dofs.7.3 Tetra Meshing TechniquesThere are two methods of tetra meshing.1) Automatic mesh: This approach is limited to simple geometries and the pre-requisite is an errorfree CAD model. The user just has to select the volume and the software automatically carries out themeshing as per the speci ed element length, quality criteria, etc.Advantage: Very quick, no meshing e ortsDisadvantage: Results in a very high number of nodes and elements. There is no control over themesh ow and the speci c mesh pattern requirement (like bolted, welded joints or contact surfacesimulation).2) 2-D (Tria) to 3-D (Tetra): This is the most commonly used method. Quad or tria meshing is carriedout on all the outer surfaces of the geometry. During the tetra meshing the quads are automaticallysplit into trias which then serve as the “basis” of the tetra elements.Steps for 2-D (Tria) to 3-D (Tetra) mesh generation :Steps 1) Study the geometryStep 2) Separate (isolate) the surfaces and split the job among engineers (if there is time constraint)四面体网格划分四面体划分有两种方法自动划分:适用于简单的、没有错误的几何体,软件自动划分。
优势:非常快、简单缺点:节点和单元数量很多,无法对网格划分过程进行控制,也不能对特定区域(如螺栓、焊接或接触)的网格进行细化2D网格到3D四面体:这是最常用的方法。
先在几何体表面划分四边形或三角形网格,然后软件以表面的网格为基础,自动在几何体内部生成四面体网格。
在网格生成过程中,表面的四边形会自动分割成三角形。
1、研究几何模型2、将几何模型的表面分成几个部分,分配给几个工程师去划分网格(如果有时间限制的话)197198a. CAE engineer 1b. CAE engineer 2Step 3) Combine the meshStep 4) Perform quality checks for the triangular elements (Min. tria angle > 150, Max. tria angle < 1200,jacobian > 0.6), zero free edges, no T-connectionStep 5) Convert the Tria mesh to a TetraStep 6) Perform quality checks for the tetra elements (tet collapse > 0.1, Jacobian and distortion > 0.5,stretch > 0.2 etc.). Improve the quality of the mesh if required.Step 7) Perform a Free-Free run or otherwise linear static analysis with dummy BC’s.3、合并网格(几何体表面的2D 网格)4、检查2D 网格单元的质量(最小角>15°,最大角<120°,雅克比>0.6,没有自由边,没有T 型连接)最小角>15°5、以2D 三角形网格为基础生成3D 四面体网格6、检查四面体单元的质量(坍塌比>0.1,雅克比和扭曲度>0.5,拉伸度>0.2等),需要时提高网格质量。
7、进行一个无约束的分析或者添加假设约束的线性静态分析。
(并不是为了求解具体问题,只是为了检查网格模型是否会报错,为后续的仿真分析做准备)199Common algorithms for Tria to Tetra Conversion :1) Advancing Front : This algorithm is very powerful and the most commonly used algorithm.2) Delaunay Algorithm3) Tria-Quad meshAll algorithms provide the following two options for Tria to Tetra conversion:1) Floating trias: The original tria mesh generated by the user on the outer surfaces might not match with the software produced tetra. Selection of this algorithm gives freedom to the software to change the triangular mesh pattern (in case of any problem in the tetra mesh generation). This option could be used for the meshing of general components or areas (areas without high stress, components representing sti ness or mass, etc.).2) Fixed trias: The original tria mesh and the generated tetra mesh pattern match. This meshing option should be used whenever you intend to “glue”/merge individually meshed components together. Otherwise it may happen that the mesh of the components to not match resulting in anincompatibility of the mesh (i.e. the mesh would not be properly connected) Original triamesh Tria and Tetra mesh together( oating tria method)Tria and Tetra mesh notsame(at cross pattern of mesh)Tria and Tetra together Tria and tetra mesh same ( xed tria method)7.4 Brick Meshing Brick meshing (also known as Hex meshing) is all about planning, hard work and patience. Brickmeshing supports only manual and semi automatic meshing options. Automatic meshing or anoption like quad to brick (tria to tetra), is not supported by commercial software.由三角形网格生成四面体网格的常用算法1、波前法:最强大和最常用的算法2、Delaunay 算法3、三角形-四边形所有这些算法,都为三角形到四边形的转换提供了以下两个选项:1、浮动三角形:软件自动生成的四面体网格可能与用户原先在表面划分的三角形网格不完全相符。