第33卷(2005)第2期计算机与数字工程105
4级灰度STNLCD驱动控制芯片的设计。
孙缵邹雪城胡晓宇黄久松余国义
(华中科技大学电子科学与技术系集成电路设计中心武汉430074)
摘要
提出了一种4级灰度的刚NU、D驱动控制芯片的总体设计方案,重点讨论了关键模块——接口电路、sI乙气M模块、显示控制电路以及电源电路的设计。在实现多种显示功能的前提下,采用省电模式、门控时钟和重定时方法进行了低功耗优化设计。基于SMIC0.35umCMOS高压模型对驱动控制芯片的功能进行了仿真验证。
关键词:U、D驱动控制MPU接口PwM佃C灰度调制V一妇仿真
中图分类号:TN710
D鹪i印ofADriVer&C伽trolIerfbr4GrayscaleSTNLICD
S珊Z啪Z0u
xuecllengHu弛10yuH眦哩J№oIIgYuGu哪
(ICDesignCeIlter,DeptofElec.Sd.&Tech∞lt'HIRSr,Wuhan430074)
AI强tr越t:Ad商gIlp喇ectof{汀NU:Ddriverand∞nt商ler诵th4一gmyscaleispres叽tedintKspaper.Thekeymodul鹤i眦ludillginterfacecir叫it,S王认Mmodule,diSplay∞ntr01circuitandp凹^啊SupplydrcuitarediSclJssedindetail.Inthe∞nditiollSofimpl锄朗tingmanydisplayfunctions,weadoptp矾versaveH划e,gatingcIockandretimingmethOdtoreduoep硎啷∞ns唧p—tion.SMIC0.35唧CMOSHighVbltagemodelisusedtov面fythefunctionoftKsdIiv盯锄doon臼dler.1【ey啪砌s:U=D幽veando∞t一,MPUInterface,pulSe诵demodulation/framerate00n廿Dl,V舒logSimul“on
CIa辎mmIb盯:TN710
1引言
随着人们对图像显示质量的要求越来越高,各种显示技术也在不断的发展。液晶显示器(L(、D)具有轻薄短小、低耗电量、无辐射危险、平面直角显示以及影像不闪烁等优势,因而得到了广泛的应用。其中srN(superTwistedNematic)L(、D在中小尺寸液晶显示领域具有广阔的市场前景,常用于移动电话、个人手持系统、寻呼机等。一般的单色趼NL(D驱动芯片都是单级灰度的,即只能显示单一的黑白效果,不能显示多种“颜色”,在人们对显示效果越来越苛刻的形势下已不能满足实际需要。
本文设计了一种新型的应用于129×128像素的STNL(、D驱动控制芯片。它不仅能实现多种显示功能,如正反显示、局部显示、图像翻转以及滚屏等…;而且可以调制4级灰度,使得每级最多可
?收到本文时间:2004年6月18日分为16个层次,因此可产生多达64种灰度效果。设计中采用省电模式、门控时钟以及重定时方法[2][3】,极大的减小了功耗。根据系统设计的要求,对芯片进行层次化功能划分,同时参考已有的同类驱动芯片的设计经验[4|,对各个模块进行协调设计,然后进行芯片的整体功能验证,从而完成芯片的前端设计。在确定了CMOS工艺后可以完成芯片的版图设计和后仿真,最后进行试流片。
2设计要求及系统结构
液晶显示驱动控制电路是在液晶像素的两电极(行电极和列电极)之间建立交变电场。由驱动电路循环地给每行电极施加选择脉冲电压,同时通过列电极上的数据给该行像素施加选择或非选择脉冲电压,以实现对像素的驱动∞J。因此,驱动控制芯片的主要作用是为液晶显示器提供扫描信号和显示数据,是单片机与液晶显示系统之间的接
4级灰度s1、NU=D驱动控制芯片的设计第33卷
口。鉴于当今移动通信设备的实际需要,我们所设计的I皿驱动控制芯片应满足以下要求:
(1)支持6800/8080并行和3一pin/4一pin串行等4种御U接口;
(2)内置129×128×2bits的SI认M;
(3)提供完备的控制指令集,实现4级灰度调
制和多种显示功能;
(4)内置低压振荡器和电源电路;
(5)工作电压为1.8V~3.3V,液晶驱动电压为4V~15V;
(6)低功耗(300uAMax.)设计。
基于以上要求,对芯片进行层次化功能划分,
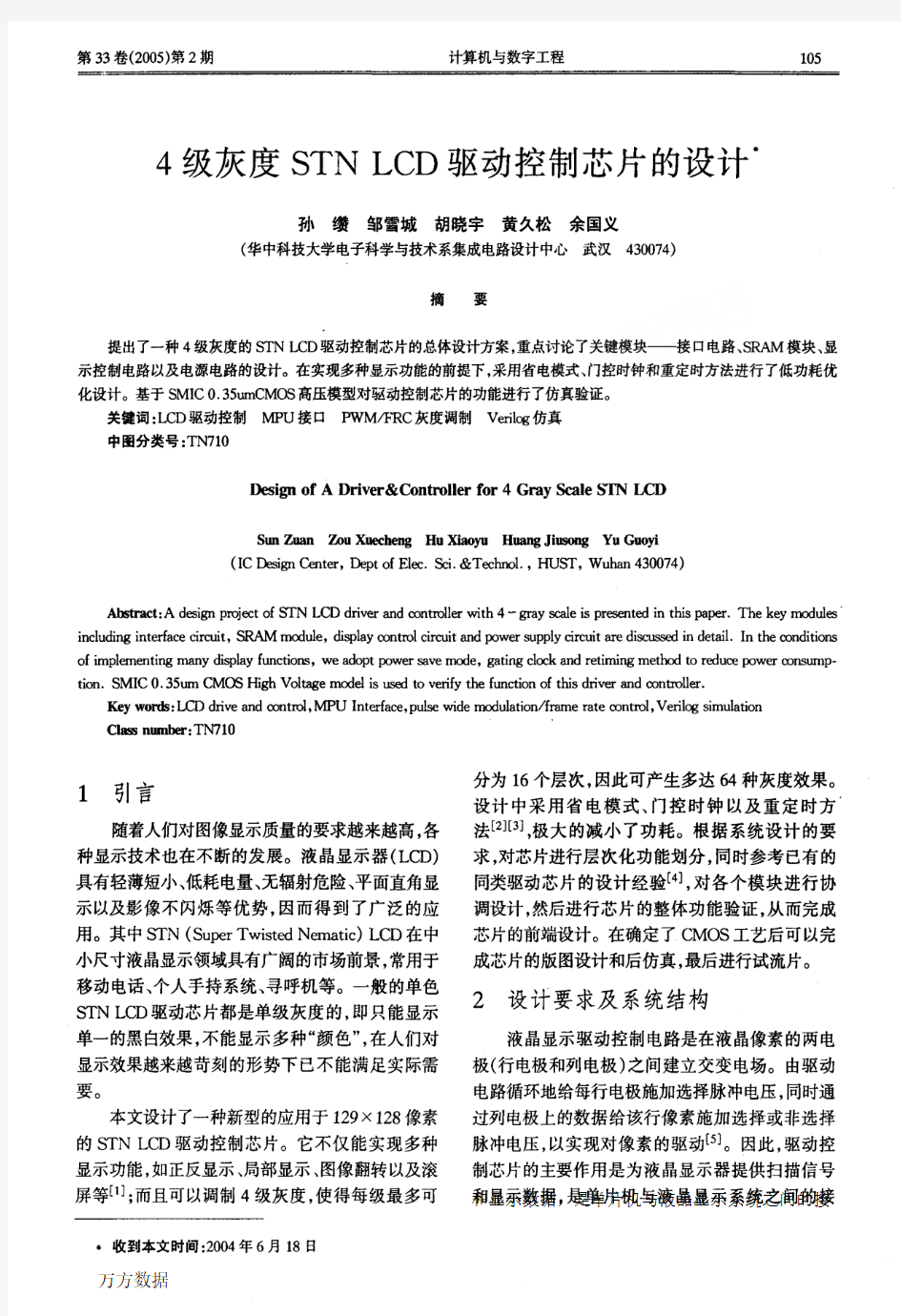
得到系统框图如图1所示。它分为模拟和数字两部分,模拟部分主要由振荡器和电源电路组成;数字部分主要由MPU接口模块、指令译码脂令寄存器模块、删模块、振荡器与显示时序控制模
块、灰度的产生与控制模块和驱动模块组成。下面
就其关键模块的设计进行分析讨论。’
§缎lllg§gl!l
l王i叠-名;ll基暑县墨宴孽
图1U如驱动控制芯片的系统框图
3关键模块的设计分析
3.1ⅧU接口模块
该模块是驱动控制芯片与MPU通信的接口,数据交换的通道。MPU通过它对芯片进行控制,向芯片中写入指令和显示数据或读出状态信息和显示数据。接口模块可以为后面的电路提供数据通道、内部时钟信号、译码使能信号、读写控制信号、以及数据口的控制信号等。它主要包括以下几部分电路:串并转换电路、内部时钟产生电路、读/写识别电路块、指令/数据识别电路,BUSY位产生
电路和控制逻辑。设计兼容6踟0/80踟并行接口和3一pin/4一pin串行接口,通过设置PS0、Psl的值来实现这四种接口模式的选择。下面简要分析6800并行接口和3一pin串行接口的工作方式。
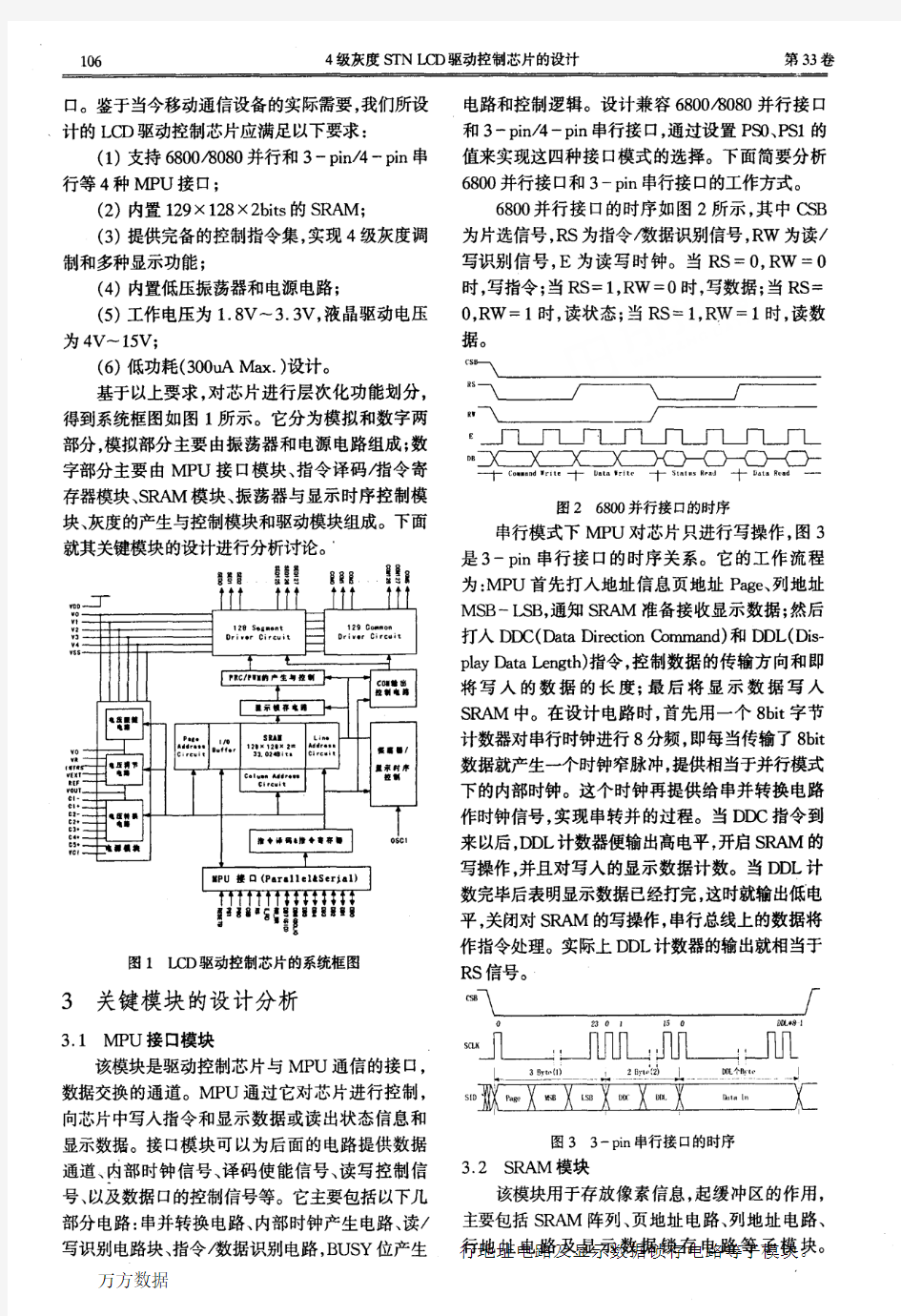
6800并行接口的时序如图2所示,其中CSB为片选信号,RS为指令傲据识别信号,RW为读/写识别信号,E为读写时钟。当RS=0,RW=0时,写指令;当Rs=1,Rw=0时,写数据;当RS=0,RW=1时,读状态;当RS=1,RW=1时,读数据。
“、
“_\/_———、厂——一n、/_——一——
e广]厂]厂|广]厂]r]厂]厂]nn]C二X二)[二汇=)[)-<]—[)_o
图26800并行接口的时序
串行模式下MPI,对芯片只进行写操作,图3是3一pin串行接口的时序关系。它的工作流程为:MPu首先打入地址信息页地址Page、列地址MSB~I娅,通知双乙蝴准备接收显示数据;然后打入D1)C(DataDirection‰lmand)和DDL(Dis.playData脚h)指令,控制数据的传输方向和即将写入的数据的长度;最后将显示数据写人sRAM中。在设计电路时,首先用一个8bit字节计数器对串行时钟进行8分频,即每当传输了8bit数据就产生一个时钟窄脉冲,提供相当于并行模式下的内部时钟。这个时钟再提供给串并转换电路作时钟信号,实现串转并的过程。当DI)C指令到来以后,DDL计数器便输出高电平,开启研乙W的写操作,并且对写入的显示数据计数。当DDL计数完毕后表明显示数据已经打完,这时就输出低电平,关闭对趼乙蝴的写操作,串行总线上的数据将作指令处理。实际上DDL计数器的输出就相当于RS信号。
6弋/_m止:n门n:ⅢLJn
3l}vn、(1j2
ByI:(小DI】L年啦t。
mⅨ立巨汇丑习匹[二三]
图33一pin串行接口的时序3.2SI洲模块
该模块用于存放像素信息,起缓冲区的作用,主要包括趼认M阵列、页地址电路、列地址电路、行地址电路及显示数据锁存电路等子模块。
第33卷(2005)第2期计算机与数字工程
SI屯州模块作为驱动芯片的中心,一方面以字节(脚~DB7)为单位被ⅧU读写,另一方面以行为单位向L(、D输出显示数据。
MPU对SRAM的读写需要列地址、页地址和I/OBuffer的配合。页地址电路实现选通某一页的8行。列地址电路的功能是为SI己气M提供列地址,并且每当写完一个字节的数据后就能实现列地址的自增一或自减一以写入新的数据。设计时通过指令来控制列地址的自增/自减功能的开启,当设置了读模式(Setmodify—read)的时候,锁定列地址;当释放读模式指令(ReSetmodify—read)到来时,解除锁定,继续实现列地址的翻转。
S&蝴整行数据的输出需要行地址电路和显示数据锁存电路的配合。行地址电路根据指令设置实现SRAM中的初始显示行,并且对sI乙蝴以行为单位进行顺序扫描,实现128个像素(对应256位数据)的同时输出;显示锁存电路保证显示数据的稳定输出,并实现正/反显功能。
下面简要分析s10气M的读写方式。从图4中可以看出,所设计的读倡控制电路有别于一般的输入偷出控制电路,它的写入和读出通道是分开的,不存在输入偷出口复用的问题。当艘U对甾认M的某一页进行读写操作时,列选择线使NMOS开关管开通,并且RS=1、RW—WR=0的设置使得该页的写控制端为1,从而写通道打开,MHT送来的数据便可写入存储单元;而Rs=1、RW—WR=1的设置使得该页的读控制端为1,存储单元里的数据能够读出到MPU。另一方面行选择线开启Sr认M与Panel通信的通道,使得某一行的128列数据输出到Pallel上。据硎模式的设置对振荡器产生的基本时钟fI。Sl避行分频得到,帧频率信号最浓根据Panel上显示M行的设置对扫描信号进行分频得到。同时为了实现液晶器件的交流驱动[5f,设计了线反转控制电路;它根据N行反转的设置对扫描信号进行分频得到交流驱动信号fM。由于设计时所用的帧频率fFR基本固定(典型值为85Hz),因此振荡器的输出频率k与部分显示的占空比1俐成反比,所以采用RC振荡器,通过调节电容C的值来改变振荡器的输出频率。以上4种频率信号之间的关系为:
{&=2PⅥM×M×fFR,fcL=M׉,fCL=2N×fM;式中M=16~128,硎=9,12,15。
COM输出控制电路接收初始显示行指令数据COM0,并且以扫描信号为时钟进行自增一或自减一计数,其输出经过译码器同步产生行移位信号,实现了顺序扫描和反序扫描功能。从而实现了局部显示、图像倒置和滚屏等效果。
3.4灰度的产生与控制模块
该模块实现删(PulSeWideM0dulation)调制以及H池(Fr撇eRateContr01)控制,达到液晶屏上不同层次的黑白效果。由于液晶响应速度的限制,单独使用刚或FRC都不能产生较高级
别的对比度,因此采用两者相结合的方式来实现4级灰度调制(wHITE、LIGHT、吼吼<、&煅),产生多达64对比度的显示效果。4级灰度的每一级可分为三种删模式所对应的不同层次的连
续的灰阶,所以定义了4组灰阶寄存器。在不同的显示系统应用时根据液晶面板的参数来具体设置它们的状态,从而得到每级各自的灰阶级别。在删模式中设定9硎、12删、15硎三种
模式可选,在FRC模式中设定3FRC和4FRC两种模式可选。
图4SI乙气M的读写控制电路
3.3振荡器与显示时序控制模块
该模块是显示时序的发生和控制中心,实现
s删中的初始显示行与Panel上的初始显示行
图5灰度控制的实现原理
的同步映射和扫描功能。其中,行扫描信号fCL根
1084级灰度srNL(、D驱动控制芯片舶设计第33卷
灰度的实现需要刖和FRC的配合,以15刚和4FRC模式为例说明工作流程。首先由PWM调制电路基于扫描信号产生16种连续的脉宽0/15,1/15,2/15…...15/15;然后由FRC
控制电路根据灰阶寄存器的值选择每一级所对应的脉宽,对应到Pand上的4帧像素就有不同的显示时间;最后由研认M中的显示数据选择4级灰度模式中的哪一级模式,并且将该模式下的脉宽送入SEG口来控制液晶点亮的时间,达到最终的显示效果。图5形象的示意了这一实现原理,图中点亮区域选择的脉宽为15/15,不点亮区域选择的脉宽为O/15;Panel上每一像素的显示效果就是4帧画面深浅效果的叠合。
3。5电源电路模块
该模块从功能上分为3个子模块:电压转换电路(VC/\bltageoOnverter),电压调节电路(VR/vdtageregulator),电压跟随电路(Ⅵ7八Htagefol—loⅥ陀r)。为防止像素电极的行间串扰效应【5J,电源电路提供驱动液晶所必需的6种电压,它们的关系为:Ⅶ>v1>V2>V3>V4>VSS。电源电路中各子模块的启动、升压倍数和调节电阻的选择都受到指令的控制,可以选用内部电源,或关闭部分子电路而使用外部电源,因而减小了功耗。
VC根据外部输入参考电源VCI,通过高效的电荷泵电路实现3~6倍的升压,产生V吼JT。设计中着重从电荷泵的两相时钟的频率和相位的角度进行了优化设计,防止两相时钟发生偏移产生边沿交越效应,从而达到提高转换效率和降低功耗的目的。
Ⅵ之由两级电压调制电路组成。第一级将外部提供的或内部产生的基准电压Ⅵ也F(2.1V)通
过电平转移电路产生一个Ⅵ三V电压;第二级将唧通过电平转移电路来生成有驱动能力的稳定的Ⅶ电压。这3个电压之间的关系为:
V叠v=(1一(63一口)/210)׉;V.0=(1
+R6/R。)×V.Ev。
VF根据偏压比的设定在Ⅶ和Vss之间进行电阻分压,然后由电压跟随电路进行阻抗转换,产生有驱动能力的稳定的电压V1、v2、V3、V4,作为显示和非显示选择电压。设计中从参考电压源的温漂,线性度以及稳定性方面优化参数设计,以使电路满足必要的精度。
3.6低功耗优化
设计中对具有自动翻转功能的电路(包括COM输出控制电路、行地址电路和列地址电路),采用门控时钟和重定时的方法进行了低功耗优化设计[3}。门控时钟技术就是在这些电路不需要工作时,停止提供时钟,使其状态不发生翻转,也就不产生动态功耗。具体做法是在这些电路的时钟信号前插入逻辑开关,根据指令来控制它们的开启。重定时方法主要是利用寄存器能屏蔽其输入端的毛刺的性质,在这些电路的输出节点插入寄存器作为输出,消除了由于电路快速频繁的翻转所产生的毛刺,从而降低了电路的功耗。另外,还可以设置省电模式,例如关闭电源电路中的若干子模块,丽相应的启用外部电源,从而大大的节省了功耗。
4仿真验证
在上述各模块结构设计的基础上,我们对数字电路和模拟电路分别进行了仿真验证。对数字电路,用、krilog硬件描述语言编写teStbench测试文件,采用M0delsim仿真软件对4种接口运用情况都进行了验证。在每种工作模式下,验证覆盖芯片的所有40条指令的工作情况,包括ⅧU对甾乙蝴的读写操作以及SRAM中的数据到Panel的映射,仿真结果如图6所示。对模拟电路,用SPICE仿真软件Spectre基于SMIC0.35啪高压模型进行了仿真模拟,结果如图7、8所示。
图6读写时序和扫描过程的仿真波形
厂
|
/
图7VC的仿真波形
vc在20K}k的双向时钟和10KQ负载下,将
第33卷(2005)第2期计算机与数字工程
图8VF的仿真波形
V领『T提升到17.9V,功耗约为3.2mw,效率为78.6%;vF准确的产生了不同偏压设定(1/5~1/12)的4种电压,达到了要求的精度和线形度。在确定了流片工艺之后,便可以进行数模混合仿真,版图设计和后仿真,还可以进行FPGA验证。
5结论
本文论述了一种4级灰度的汀NLCD驱动控制芯片的设计思想和方法。参照现有产品的特点和设计经验,作了一些改进设计,如4级灰度显示效果,省电模式、门控时钟和重定时方法减小功耗等。经M。delsim和sPICE仿真模拟,证明设计方案可行,设计可靠。以本设计芯片为基础,通过较少改动可开发出系列芯片产品,具有广阔的市场前景。
参考文献
[1]W.m.L0,AndrevPkullg,YvonneChan,vincelltw.S.Wong,L(DD五v日DeSigllfOrM0bileC咖unicationssySt咖[C].1EEE.ProoeedingSoftheR)urthAsian跏n—posi哪.2002.
[2]JANM.RABAEY,DigitalInt曙ratedcircuits,ADesignPe印ective[M].P揪1tice—H甜1Intemati∞al,INC.
[3]wu.Q,Pedram.M,wu.X.aock—gatinga11di坞appli—cationto1awpawerdesignofsequentialdrcuits[J].Cus—to】mInteg阳tedarcuitsC0nferellce,Pmceedin秘oftheIEEE,May1997:479—482
[4]杨廉峰等.一种s1NL(、D驱动芯片的设计研究[J].微电子学2001;31(1):53—57.
[5]刘永智,杨开愚.液晶显示技术[M].电子科技大学出版社,2000.12.
+-量卜壬-圣._圣+_量._圣.一圣-圣+_圣._圣._圣-圣+_量+_圣-圣-量}壬+_圣+-圣-圣+-圣+_量+_量卜曩-圣扣量-圣÷_董+_量+-圣+_圣-圣+-圣+_圣-圣+-圣+_圣+_圣+-量+_壬+-圣+.圣-圣+_圣-量
(上接第86页)
报,极大地方便了纳税人。纳税人在外地也可通过计算机网络进行申报。
3.为纳税人营造一个安全可靠的网上申报环境,减少了申报过程中的错误率。方便用户使用、上报数据准确:各类报表与原书面形式相同,符合用户填写习惯;表内平衡和表间勾对关系进行自动校验。
4.为广大纳税人提供即时、准确、详实的税收及培训信息,开辟了税务机关与纳税人交互的新途径。
5.为广大纳税人提供个性化的服务。
4结束语
本文构建了税务系统电子政务和总体技术框架,提出了分层模型的基本概念。从电子政务分层逻辑模型、电子政务信息安全基础设施和授予权管理基础设施等三个方面来描述税务系统电子政务的总体技术框架。结合工作实际,给出了税务系统网上报税系统实例,分析了其基本功能和价值。
我们可以看到,PKI的应用是很广泛的,在税务系统的电子政务中的应用更是非常重要而迫切。可以说,无论是在保证数字签名的安全性上,还是在保证数字证书的真实性上,PKI都起着不可或缺作用。我们在实施电子政务时应该注重发挥它的功能,集合国家组织各级有关部门和技术力量,对一些公共技术加以研究制定。如建立全国范围的电子政务信用认证体系,建立统一的公钥管理。各级管理部门则应根据当地的实际情况,充分利用社会资源,建立本地区的各类信用机制、支援网络和数据灾难备份的基础设施,为PKI的应用提供条件,也为PKI的应用提供保障。
参考文献
[1]卢开澄.计算机密码学一计算机网络中的数据保密与安全[M].清华大学出版社,1998
[2]金光,李荣茜.PKI加密技术在电子政务网络安全中的应用[J].宁波大学学报(理工版)2003(1)
[3]胡庆辉,赵正文,李丽萍.PKI技术在政府办公自动化系统信息安全中的应用[J].网络安全技术与应用,2004(9)
[4]谢冬青,冷健.PKI原理与技术[M].清华大学出版社,2004
[5]AdaⅡ1SC,LloydS.冯登国等译.公开密钥基础设施——概念、标准和实现[M].人民邮电出版社,2001
[6]郭中献,詹榜华,杨义先.认证理论与技术发展
4级灰度STN LCD驱动控制芯片的设计
作者:孙缵, 邹雪城, 胡晓宇, 黄久松, 余国义
作者单位:华中科技大学电子科学与技术系集成电路设计中心,武汉,430074
刊名:
计算机与数字工程
英文刊名:COMPUTER AND DIGITAL ENGINEERING
年,卷(期):2005,33(2)
引用次数:2次
参考文献(5条)
1.W m Lo.Andrew kung.Yvonne Chan.Vincent W.S Wong, LCD Driver Design for Mobile Communications System 2002
2.Jan M RABAEY, Digital Integrated Circuits, A Design Perspective
3.Wu Q.Pedram M.Wu X Clock- gating and its application to low power design of sequential circuits 1997
4.杨廉峰一种STN LCD驱动芯片的设计研究
5.刘永智.杨开愚液晶显示技术 2000
相似文献(3条)
1.期刊论文胡晓宇.邹雪城.黄久松.孙缵.余国义基于STN LCD驱动控制芯片的MPU接口电路的设计-计算机与数字工程2005,33(2)
设计一种应用于STN LCD驱动芯片中的可支持多种类型MPU的接口电路,该电路在整个芯片中用于为内部电路提供数据,为电路的正常工作提供所需时序,并在同类设计中率先支持I2C总线协议.简单介绍了MPU接口电路的设计要求,重点描述了MPU接口电路中各个模块的设计.采用Verilog对所设计的接口电路功能进行了仿真验证,并且整个芯片用SMIC 0.25μm工艺得到了实现.
2.期刊论文孟军.温作晓.魏同立一种带有光标显示的LCD驱动控制芯片的设计-电子器件2004,27(1)
介绍了一种LCD驱动控制芯片的总体设计方案.该LCD驱动控制芯片具有比较完备的指令系统、完善的MPU接口和LCD接口、能存储大量常用字符的ROM、用户可以自行设计字符的RAM、光标显示电路等显著特色.重点讨论了MPU接口、指令译码、光标显示等模块的设计.最后,用Powrmill对芯片进行了功能和功耗仿真.
3.学位论文黄久松中小尺寸灰度点阵液晶驱动控制芯片的设计2005
液晶显示器件由于具有体积小、重量轻、低电压、低功耗等特点,因而是一种比较流行的平板显示器件。它虽然存在驱动电路逻辑比较复杂、较难与单片机连接等缺点,但随着大规模集成电路的迅速发展,这些缺点已经被克服,液晶显示器件已经进入成熟阶段。其中超扭曲列向液晶显示器件在中小尺寸LCD领域占很大的市场,有其独特的优势。本文讨论了一种功能较完备较复杂的带4种MPU接口的4级灰度128×129点阵STNLCD驱动控制芯片的设计。在设计中采用FRC/PWM相结合的灰度调制方式,通过设置灰度寄存器的值来调整灰度的深浅,使之符合所选择的LCM的最佳特性。同时在控制电路中上加入屏幕的部分显示、交流驱动、滚屏以及图像的硬件翻转等功能,并在设计中考虑了显示效果的提高。根据“自顶向下”的设计思想,将芯片进行层次化功能划分,同时,参考已有的同类驱动芯片的设计经验,结合“自底向上”的原理图输入设计方法对部分模块进行设计,最后根据系统设计的框架对各模块进行协调设计,并进行芯片的整体功能验证,从而达到设计的目的。本文按照ASIC的设计流程,首先详细介绍了灰度STNLCD驱动控制芯片的系统设计和规范定义;随后就灰度STNLCD专用驱控制芯片的关键模块电路:MPU接口电路、时序控制电路、SRAM、驱动电路、电源电路的进行verilogHDL描述、逻辑综合或者原理图输入,从而完成芯片的前端设计;最终确定采用Chartered的0.35μmCMOS高压工艺顺利完成了芯片版图设计以及后仿真,进而完成芯片的全部设计。
引证文献(2条)
1.詹琰.李涛.潘丽坤.周志刚.雷永明.苏秀敏全彩 128×160 液晶显示器驱动电路[期刊论文]-电子器件 2008(01)
2.楼久怀.潘洋洋.沈海斌.樊俊锋空间扩展FRC算法及其实现[期刊论文]-江南大学学报(自然科学版) 2007(03)
本文链接:https://www.doczj.com/doc/662663366.html,/Periodical_jsjyszgc200502028.aspx
下载时间:2010年3月31日
课程设计报告模板()
————————————————————————————————作者: ————————————————————————————————日期: ?
课程设计(论文)任务书 软件学院软件+电商专业09级(2)班 一、课程设计(论文)题目基本模型机设计与实现 二、课程设计(论文)工作自2011年6月 20 日起至2011年 6月 24日止。 三、课程设计(论文) 地点:计算机组成原理实验室(5#301) 四、课程设计(论文)内容要求: 1.课程设计的目的 通过课程设计的综合训练,在掌握部件单元电路实验的基础上,进一步掌握整机 概念。培养学生实际分析问题、解决问题和动手能力,最终目标是想通过课程设计的形式,帮助学生系统掌握该门课程的主要内容,更好地完成教学任务。 2.课程设计的任务及要求 1)基本要求? (1)课程设计前必须根据课程设计题目认真查阅资料; (2)实验前准备好实验程序及调试时所需的输入数据; (3)实验独立认真完成; (4)对实验结果认真记录,并进行总结和讨论。 2)课程设计论文编写要求 (1)按照书稿的规格撰写打印课设论文 (2)论文包括目录、绪论、正文、小结、参考文献、附录等 (3)正文中要有问题描述、实验原理、设计思路、实验步骤、调试过程与遇到问题的解决方法、总结和讨论等 (4)课设论文装订按学校的统一要求完成 3)课设考核 从以下几方面来考查:
(1)出勤情况和课设态度; (2)设计思路; (3)代码实现; (4)动手调试能力; (5)论文的层次性、条理性、格式的规范性。 4)参考文献 [1]王爱英.计算机组成与结构[M]. 北京:清华大学出版社, 2007. [2] 王爱英. 计算机组成与结构习题详解与实验指导[M]. 北京:清华大学出版社, 2007. 5)课程设计进度安排 内容天数地点 构思及收集资料1图书馆 实验与调试 3 实验室 撰写论文 1 图书馆 6)任务及具体要求 设计实现一个简单的模型机,该模型机包含若干条简单的计算机指令,其中至少包括输入、输出指令,存储器读写指令,寄存器访问指令,运算指令,程序控制指令。学生须根据要求自行设计出这些机器指令对应的微指令代码,并将其存放于控制存储器,并利用机器指令设计一段简单机器指令程序。将实验设备通过串口连接计算机,通过联机软件将机器指令程序和编写的微指令程序存入主存中,并运行此段程序,通过联机软件显示和观察该段程序的运行,验证编写的指令和微指令的执行情况是否符 合设计要求,并对程序运行结果的正、误分析其原因。 学生签名: 亲笔签名 2011年6月20 日 课程设计(论文)评审意见 (1)设计思路:优( )、良()、中( )、一般()、差( ); (2)代码实现:优()、良()、中()、一般()、差();
新能源汽车电机驱动系统关键技术展望新能源汽车电机驱动系统关键技术展望[J]. 科学导报·学术, 2019年第32期摘要:本文探讨了新能源汽车电机驱动系统的关键技术及发展趋势,包括驱动控制器中的功率半导体器件及封装、智能门极驱动、基于器件的系统集成设计,以及驱动电机中的扁铜线、多相永磁电机、永磁同步磁阻电机等关键技术。其中,着重介绍了当前车用电机驱动技术的发展趋势,并指出永磁同步电机在未来10年内将依然是新能源汽车市场的主流驱动电机。同时,通过横向比较指出当前我国在驱动电机发展道路上所面临的关键问题,可以为我国未来新能源汽车技术发展提供一定参考。 关键词:新能源汽车;电机驱动系统;永磁同步电机 1、前言 随着人们生活水平的提高,汽车逐渐走进千家万户,但是环境污染问题也随之加重。发展的问题只能靠发展来解决。汽车尾气是影响空气质量的重要因素,为了缓解能源紧缺,减少环境污染,新能源汽车应运而生。但是新能源汽车发展受到技术的掣肘,新能源汽车电机驱动系统控制技术作为新能源机车发展的关键技术,尚未成熟,仍需继续探索和优化。 2、新能源汽车技术的发展前景 2.1新能源汽车质量发展 未来,新能源汽车技术必然会向环保方向逐渐演变和深化,于是减少能耗就要求减少小汽车本身的质量。有研究数据显示,内燃机汽车减少10%的汽车质量就能减少燃油消耗量的7%,这也决定了新能源汽车将向轻量化发展,以提高新能源汽车续航能力与动力性。新能源汽车轻量化发展指的是汽车的车身设计,此外还有电池、传动设备等,今后的汽车制造还需使用更多新型的轻质材料,如铝合金、高性能钢、其他复合材料,而相关企业也要从新能源汽车结构上进行改进,确保轻量化的基础上保障汽车结构的完整和性能强度提升,进而提高新能源汽车生产率,使其受到更多消费者的青睐。 2.2新能源汽车电池发展 电池是新能源汽车的核心,其产生的动力均依靠电池,对电池的制造要注重工艺与成本的结合。实际上,不少电池制造企业在工艺与成本的新能源电池提供
控制系统仿真课程设计 (2011级) 题目控制系统仿真课程设计学院自动化 专业自动化 班级 学号 学生姓名 指导教师王永忠/刘伟峰 完成日期2014年6月
控制系统仿真课程设计一 ———交流异步电机动态仿真 一 设计目的 1.了解交流异步电机的原理,组成及各主要单元部件的原理。 2. 设计交流异步电机动态结构系统; 3.掌握交流异步电机调速系统的调试步骤,方法及参数的整定。 二 设计及Matlab 仿真过程 异步电机工作在额定电压和额定频率下,仿真异步电机在空载启动和加载过程中的转速和电流变化过程。仿真电动机参数如下: 1.85, 2.658,0.2941,0.2898,0.2838s r s r m R R L H L H L H =Ω=Ω===, 20.1284Nm s ,2,380,50Hz p N N J n U V f =?===,此外,中间需要计算的参数如下: 21m s r L L L σ=-,r r r L T R =,22 2 s r r m t r R L R L R L +=,10N m TL =?。αβ坐标系状态方程: 其中,状态变量: 输入变量: 电磁转矩: 2p m p s r s L r d ()d n L n i i T t JL J βααωψψβ=--r m r r s r r d 1d L i t T T ααβαψψωψ=--+r m r r s r r d 1d L i t T T ββαβψψωψ=-++22s s r r m m m s r r s s 2r r r r d d i R L R L L L L i u t L T L L ααβαα σψωψ+=+-+22 s s r r m m m s r r s s 2 r r r r d d i R L R L L L L i u t L T L L ββαββ σψωψ+=--+[ ] T r r s s X i i αβαβωψψ=[ ] T s s L U u u T αβ=()p m e s s s s r n L T i i L βααβ ψψ=-
LED 常用芯片技术资料 1、列电子开关74HC595 (串并移位寄存器) 第14脚DATA ,串行数据输入口,显示数据由此进入,必须有时钟信号的配合才能移入。 第13脚EN ,使能口,当该引脚上为“1”时QA~QH口全部为“1”,为“0”时QA~QH的输出由输入的数据控制。第12脚STB ,锁存口,当输入的数据在传入寄存器后,只有供给一个锁存信号才能 将移入的数据送QA~QH口输出。 第11脚CLK ,时钟口,每一个时钟信号将移入一位数据到寄存器。 第10脚SCLR ,复位口,只要有复位信号,寄存器内移入的数据将清空,一般接VCC 。第9脚DOUT ,串行数据输出端,将数据传到下一个。第15、1~7脚,并行输出口也就是驱动输出口,驱动LED 。 2、译码器 74HC138 第1~3脚A 、B 、C ,二进制输入脚。第4~6脚片选信号控制,只有在4、5脚为“0”6脚为“1”时,才会被选通,输出受A 、B 、C 信号控制。其它任何组合方式将不被选通,且Y0~Y7输出全为“1”。
3、缓冲器件74HC245 第1脚DIR ,输入输出端口转换用,DIR=“1” A输入B 输出,DIR=“0” B输入A 输出。第2~9脚“A ”信号输入输出端;第11~18脚“B ”信号输入输出端。 第19脚G ,使能端,为“1”A/B端的信号将不导通,为“0”时A/B端才被启用。
4、4953的作用:行驱动管,功率管。 1、3脚VCC , 2、4脚控制脚,2脚控制7、8脚的输出,4脚控制5、6脚的输出,只有当2、4脚为“0”时,7、8、5、6才会输出,否则输出为高阻状态。 5、74HC04的作用:6位反相器。 信号由A 端输入Y 端反相输出,A1与Y1为一组,其它类推。例:A1=“1”则Y1=“0”、A1=“0”则Y1=“1”,其它组功能一样。 6、 74HC126(四总线缓冲器)正逻辑 Y=A 2、SDI 串行数据输入端 3、CLK 时钟信号输入端, 4、LE 数据锁存控制端 5~20、恒流源输出端 21、OE 输出使能控制端 22、SDO 串行数据输出端,级联下一个芯片 23、R-EXT 外接电阻,控制恒流源输出端电流大小
模拟电子技术课程设计报告设计题目:直流稳压电源设计 专业电子信息科学与技术 班级电信092 学号 200916022230 学生姓名夏惜 指导教师王瑞 设计时间2010-2011学年上学期 教师评分 2010年月日
昆明理工大学津桥学院模拟电子技术课程设计 目录 1.概述 (2) 1.1直流稳压电源设计目的 (2) 1.2课程设计的组成部分 (2) 2.直流稳压电源设计的内容 (4) 2.1变压电路设计 (4) 2.2整流电路设计 (4) 2.3滤波电路设计 (8) 2.4稳压电路设计 (9) 2.5总电路设计 (10) 3.总结 (12) 3.1所遇到的问题,你是怎样解决这些问题的12 3.3体会收获及建议 (12) 3.4参考资料(书、论文、网络资料) (13) 4.教师评语 (13) 5.成绩 (13)
昆明理工大学津桥学院模拟电子技术课程设计 1.概述 电源是各种电子、电器设备工作的动力,是自动化不可或缺的组成部分,直流稳压电源是应用极为广泛的一种电源。直流稳压电源是常用的电子设备,它能保证在电网电压波动或负载发生变化时,输出稳定的电压。一个低纹波、高精度的稳压源在仪器仪表、工业控制及测量领域中有着重要的实际应用价值。 直流稳压电源通常由变压器、整流电路、滤波电路、稳压控制电路所组成,具有体积小,重量轻,性能稳定可等优点,电压从零起连续可调,可串联或关联使用,直流输出纹波小,稳定度高,稳压稳流自动转换、限流式过短路保护和自动恢复功能,是大专院校、工业企业、科研单位及电子维修人员理想的直流稳压电源。适用于电子仪器设备、电器维修、实验室、电解电镀、测试、测量设备、工厂电器设备配套使用。几乎所有的电子设备都需要有稳压的电压供给,才能使其处于良好的工作状态。家用电器中的电视机、音响、电脑尤其是这样。电网电压时高时低,电子设备本身耗供电造成不稳定因家。解决这个不稳定因素的办法是在电子设备的前端进行稳压。 直流稳压电源广泛应用于国防、科研、大专院校、实验室、工矿企业、电解、电镀、充电设备等的直流供电。 1.1直流稳压电源设计目的 (1)、学习直流稳压电源的设计方法; (2)、研究直流稳压电源的设计方案; (3)、掌握直流稳压电源的稳压系数和内阻测试方法。 1.2课程设计的组成部分 1.2.1 设计原理
新能源汽车驱动系统及动力总成相关技术分析 【摘要】当今的汽车工业,能够给人类的出行带来快捷和方便,但同时也会导致能源的大量消耗和环境的污染。为了汽车工业能够可持续发展,我们就需要新的技术或者新的能源来解决能源和环境问题。本文分析了新能源汽车驱动系统及动力总成方面的一些技术成果以及发展趋势。 【关键词】新能源汽车驱动系统动力总成相关技术 随着科学技术的快速发展,汽车工业也得到了大力发展。汽车为人们的出行带来了极大的方便,能够满足人们的工作和生活需求。随着人们生活水平的改善,汽车也开始从奢侈品慢慢变为人们生活中的必需品,开始不断的涌入每个家庭。汽车的增多导致了很多问题的出现,首先是能源的大量消耗,地球上储存的石油和天然气变得越来越少;然后是环境的污染,堵车、噪音、尾气污染等都在不断的侵蚀自然和人类。为了解决上述问题,我们需要寻找新的技术和新的能源,促使汽车行业的可持续发展。本文先对新能源汽车进行简单的介绍,再着重阐述新能源汽车的相关技术。 1 新能源汽车概述 新能源汽车是指动力来源除了使用传统能源之外的所有汽车。它是将现今汽车方面比较先进的技术进行综合。新能源汽车主要可以分为燃料电池电动汽车、混合动力电动汽车、纯电动汽车等三类。 燃料电池汽车是利用化学反应产生电流来驱动的汽车。它具有以下优点:燃油经济性好;尾气排放近似为零,对环境污染小;运行振动小、没有噪声污染。混合动力汽车,是指使用内燃机和电驱动两种驱动方式相混合的汽车。它能够针对行驶环境的不同,从而使用不同的驱动方式,可具有两种驱动方式的优点。纯电动汽车是指依靠动力电池进行驱动的汽车,该技术相对来说比较简单成熟,只要有足够的电力供应就行。但纯电动汽车发展仍存在很多瓶颈,比如蓄电池储存的能量太少,电池生产成本贵,需要经常充电等等。 2 驱动系统及动力总成相关技术 新能源汽车动力总成主要由电源系统和驱动系统组成。电源系统的性能是汽车行驶里程、运行成本的关键所在;驱动系统是汽车的核心部件,它决定了汽车的动力性能。所以发展新能源汽车的关键就是要提升驱动系统和电源系统的性能。 2.1 电源系统 电源系统主要包括电池及电源管理系统,它是动力总成的关键部件。 (1)电池。电池一直是制约新能源汽车的关键所在,虽然现在的电动车发展比
成都理工大学工程技术学院《过程控制系统课程设计实验报告》 名称:单容水箱液位过程控制 班级:2011级自动化过程控制方向 姓名: 学号:
目录 前言 一.过程控制概述 (2) 二.THJ-2型高级过程控制实验装置 (3) 三.系统组成与工作原理 (5) (一)外部组成 (5) (二)输入模块ICP-7033和ICP-7024模块 (5) (三)其它模块和功能 (8) 四.调试过程 (9) (一)P调节 (9) (二)PI调节 (10) (三)PID调节 (11) 五.心得体会 (13)
前言 现代高等教育对高校大学生的实际动手能力、创新能力以及专业技能等方面提出了很高的要求,工程实训中心的建设应紧紧围绕这一思想进行。 首先工程实训首先应面向学生主体群,建设一个有较宽适应面的基础训练基地。通过对基础训练设施的 集中投入,面向全校相关专业,形成一定的规模优势,建立科学规范的训练和管理方法,使训练对象获得机械、 电子基本生产过程和生产工艺的认识,并具备一定的实践动手能力。 其次,工程实训的内容应一定程度地体现技术发展的时代特征。为了适应现代化工业技术综合性和多学科交叉的特点,工程实训的内容应充分体现机与电结合、技术与非技术因素结合,贯穿计算机技术应用,以适应科学技术高速发展的要求。应以一定的专项投入,建设多层次的综合训练基地,使不同的训练对象在获得对现代工业生产方式认识的同时,熟悉综合技术内容,初步建立起“大工程”的意识,受到工业工程和环境保护方面的训练,并具备一定的实用技能。 第三,以创新训练计划为主线,依靠必要的软硬件环境,建设创新教育基地。以产品的设计、制造、控制乃至管理为载体,把对学生的创新意识和创新能力的培养,贯穿于问题的观测和判断、创造和评价、建模和设计、仿真和建造的整个过程中。
<
摘要(三号,黑体,居中,字间空两格字符) (空二行换行) 空4格打印摘要内容(小四号宋体,行距20)。 关键词:(摘要内容后下空一行打印“关键词”三字(小四号黑体),其后为关键词(小四号宋体),每一关键词之间用分号隔开,最后一个关键词后不打标点符号。 ABSTRACT ①居中打印“ABSTRACT”,再下空二行打印英文摘要内容。②摘要内容每段开头留四个空字符。③摘要内容后下空一行打印“Key words”,其后为关键词用小写字母,每一关键词之间用分号隔开,最后一个关键词后不打标点符号。 Key words :aaa;bbb;ccc
目录(3号,黑体,居中) (空1行,以小4号黑体设置字体及大小,行间距22、字间距标准) 1 XXXXXX………………………………………………………………………… 1.1 XXXXXX……………………………………………………………………… 1.2 XXXXXX……………………………………………………………………… ┇ 2 XXXXXX………………………………………………………………………… 2.1 XXXXXX……………………………………………………………………… 2.2 XXXXXX……………………………………………………………………… ┇ 3 4 结束语 参考文献………………………………………………………………………………. 致谢……………………………………………………………………………………附录……………………………………………………………………………………
H a r b i n I n s t i t u t e o f T e c h n o l o g y 课程设计说明书(论文) 课程名称:自动控制理论课程设计 设计题目:直线一级倒立摆控制器设计 院系:电气学院电气工程系 班级: 设计者: 学号: 指导教师: 设计时间:2016.6.6-2016.6.19 手机: 工业大学教务处
*注:此任务书由课程设计指导教师填写。
直线一级倒立摆控制器设计 摘要:采用牛顿—欧拉方法建立了直线一级倒立摆系统的数学模型。采用MATLAB 分析了系统开环时倒立摆的不稳定性,运用根轨迹法设计了控制器,增加了系统的零极点以保证系统稳定。采用固高科技所提供的控制器程序在MATLAB中进行仿真分析,将电脑与倒立摆连接进行实时控制。在MATLAB中分析了系统的动态响应与稳态指标,检验了自动控制理论的正确性和实用性。 0.引言 摆是进行控制理论研究的典型实验平台,可以分为倒立摆和顺摆。许多抽象的控制理论概念如系统稳定性、可控性和系统抗干扰能力等,都可以通过倒立摆系统实验直观的表现出来,通过倒立摆系统实验来验证我们所学的控制理论和算法,非常的直观、简便,在轻松的实验中对所学课程加深了理解。由于倒立摆系统本身所具有的高阶次、不稳定、多变量、非线性和强耦合特性,许多现代控制理论的研究人员一直将它视为典型的研究对象,不断从中发掘出新的控制策略和控制方法。 本次课程设计中以一阶倒立摆为被控对象,了解了用古典控制理论设计控制器(如PID控制器)的设计方法和用现代控制理论设计控制器(极点配置)的设计方法,掌握MATLAB仿真软件的使用方法及控制系统的调试方法。 1.系统建模 一级倒立摆系统结构示意图和系统框图如下。其基本的工作过程是光电码盘1采集伺服小车的速度、位移信号并反馈给伺服和运动控制卡,光电码盘2采集摆杆的角度、角速度信号并反馈给运动控制卡,计算机从运动控制卡中读取实时数据,确定控制决策(小车运动方向、移动速度、加速度等),并由运动控制卡来实现该控制决策,产生相应的控制量,使电机转动,通过皮带带动小车运动从而保持摆杆平衡。 图1 一级倒立摆结构示意图
直流电机驱动与控制系统设计 【摘要】介绍了基于AT89C52单片机,利用光电传感器检测直流电机的转速,采用PWM调速方式,通过AT89C52单片机产生控制信号直接控制驱动芯片LMD18200,从而间接控制直流电机的速度、正反转,以及停止,并可以调节速度至预先设定的速度。 【关键词】直流电机;单片机;lmd18200;PWM调速 直流电机在机器人和各种自动化控制领域发挥着重要的作用,而对电机速度的控制尤其重要,传统的控制系统通常采用模拟元件,如晶体管、各种线性运算电路等,虽在一定程度上满足了生产要求,但线路复杂、通用性差,控制效果受到器件性能、温度等因素的影响,从而使系统的运行特性也随之变化,故系统的运行可靠性及准确性得不到保证,甚至出现事故[1]。直流电机的数字控制已经成为了电动机控制的发展趋势,用单片机对电动机进行控制是实现电机数字控制的最常用手段,但是仅仅使用单片机进行控制会使运行程序复杂。为了减小单片机的负担,本文使用专门的直流电机控制芯片LMD18200,设计了一种基于单片机的直流电机驱动控制系统。 1.硬件电路的组成 系统硬件电路结构框图如图1所示,主要包括单片机电路、稳压电路、转速检测电路、转数显示电路、隔离电路、LMD18200驱动电路等。 1.1 稳压电路 硬件系统需要两个不同大小的电压供电。一个电压是所用驱动芯LMD18200电源端口的电压,该电压最大可以使用55V,在该硬件电路中使用的是24V;另一个电压大小为5V,该电压提供给单片机、转数测量电路中的LM393芯片以及隔离电路中的光电耦合芯片6N137。为了减少成本,硬件调试方便及满足设计的合理性,本设计中使用了稳压芯片LM7805,从而实现一个24V电源对整个硬件电路供电。具体电路如图2所示。电路左边接入24V的电经过稳压芯片LM7805将右边输出电压稳定到5V。 1.2 隔离电路 单片机输出的控制信号包括PWM控制信号和转向信号。由于驱动芯片LDM18200的控制信号是由单片机产生的,而驱动芯片输入电压较大,如果电路发生问题,电流就直接流入单片机,这样会对单片机造成损害,为了解决这个问题,在单片机和驱动芯片之间接入隔离电路,从而使单片机和驱动芯片进行隔离。同时考虑到PWM信号频率高[2],高达16.5khz,普通的光电隔离器件不能应用,故选用了高速光电耦合器芯片6N137。以PWM信号为例,转向信号类似,具体电路如图3所示,该种连接方法在传输过程中逻辑状态不变,单片机产生的PWM 信号从芯片6N137的3号引脚输入,从网络标号PWM端输出。 1.3 转速检测电路 采用光电传感器测量直流电机的转速。在直流电机转轴的末端贴上一个黑白交替的塑料卡片,该塑料卡片由三层组成,上下两层由透明塑料组成,中间夹着十张均匀分布的小黑纸。根据光电传感器的工作原理,直流电机转动一周,光电传感器输出引脚输出十个脉冲信号。同时考虑到光电传感器输出的脉冲信号不规则,将其输入到单片机后,不宜于单片机对其识别,因此在光电传感器的输出引脚连接一个由运放芯片LM393组成的脉冲整形电路[3]。具体电路如图4所示,
.课程设计报告撰写规范
————————————————————————————————作者:————————————————————————————————日期: 2
江西理工大学应用科学学院信息工程系 课程设计规范 (试行) 信息工程系 二○一○年六月
第1章内容要求 第1章内容要求 课程设计报告由以下几个部分组成组成,依次为: I、统一的封面,封面之后为课设评分表及答辩记录表; II、摘要; III、目录; IV、课程设计总结报告正文; V、总结(本课题核心内容、特点和方案的优缺点、改进方向和意见)VI、按统一格式列出主要参考文献。 1
第2章格式要求 第2章格式要求 课程设计报告每部分从新的一页开始,各部分要求如下: 2.1封面 统一的封面(含课程设计课题名称、专业、班级、姓名、学号、指导教师等,详见第五部分“格式范例”) 2.2摘要 应概括地反映出本课程设计的主要内容,包括工作目的、实验研究方法、研究成果和结论,重点是本论文的主要工作。摘要力求语言精炼准确,建议500字以内。摘要中不要出现图片、图表、表格或其他插图材料。 关键词是为了便于作文献索引和检索工作而从论文中选取出来用以表示全文主题内容信息的单词或术语。 关键词在摘要内容后另起一行标明,一般3~5个,之间用“;”分开。 2.3 目录 目录由标题名称和页码组成,包括:正文(含结论)的一级、二级和三级标题和序号。具体格式见第五部分“格式范例”。 2.4 符号说明 如果课程设计报告中使用了大量的物理量符号、标志、缩略词、专门计量单位、自定义名词和术语等,应将全文中常用的这些符号及意义列出。如果上述符号和缩略词使用数量不多,可以不设专门的主要符号表,但在报告中出现时须加以说明。缩略词应列出中英文全称。 2
《计算机控制技术》课程设计单闭环直流电机调速系统
1 设计目的 计算机控制技术课程是集微机原理、计算机技术、控制理论、电子电路、自动控制系统、工业控制过程等课程基础知识一体的应用性课程,具有很强的实践性,通过这次课程设计进一步加深对计算机控制技术课程的理解,掌握计算机控制系统硬件和软件的设计思路,以及对相关课程理论知识的理解和融会贯通,提高运用已有的专业理论知识分析实际应用问题的能力和解决实际问题的技能,培养独立自主、综合分析与创新性应用的能力。 2 设计任务 2.1 设计题目 单闭环直流电机调速系统 实现一个单闭环直流电机调压调速控制,用键盘实现对直流电机的起/停、正/反转控制,速度调节要求既可用键盘数字量设定也可用电位器连续调节,需要有速度显示电路。扩展要求能够利用串口通信方式在PC上设置和显示速度曲线并且进行数据保存和查看。 2.2 设计要求 2.2.1 基本设计要求 (1)根据系统控制要求设计控制整体方案;包括微处理芯片选用,系统构成框图,确定参数测围等; (2)选用参数检测元件及变送器;系统硬件电路设计,包括输入接口电路、逻辑电路、操作键盘、输出电路、显示电路; (3)建立数学模型,确定控制算法; (4)设计功率驱动电路; (5)制作电路板,搭建系统,调试。 2.2.2 扩展设计要求 (1)在已能正常运行的微计算机控制系统的基础上,通过串口与PC连接; (2)编写人机界面控制和显示程序;编写微机通信程序;实现人机实时交互。
3方案比较 方案一:采用继电器对电动机的开或关进行控制。这个方案的优点是电路较为简单,缺点是继电器的响应时间慢、机械结构易损坏、寿命较短、可靠性不高。 方案二:采用电阻网络或数字电位器调整电动机的分压,从而达到调速的目的。但是电阻网络只能实现有级调速,而数字电阻的元器件价格比较昂贵。更主要的问题在于一般电动机的电阻很小,但电流很大;分压不仅会降低效率,而且实现很困难。 方案三:采用由电力电子器件组成的H 型PWM 电路。用单片机控制电力电子器件使之工作在占空比可调的开关状态,精确调整电动机转速。这种电路由于工作在电力电子器件的饱和截止模式下,效率非常高;H 型电路保证了可以简单地实现转速和方向的控制;电子开关的速度很快,稳定性也极佳,是一种广泛采用的PWM 调速技术。 兼于方案三调速特性优良、调整平滑、调整围广、过载能力大,因此本设计采用方案三。 4单闭环直流电机调速系统设计 4.1单闭环调速原理 4.1.1 闭环系统框图 4.1.2 调速原理 直流电机转速有: 常数Ke Ka 不变,Ra 比较小。 所以调节Ua 就能调节n 。 n n I K R K U K R I U n d d a e e d ?-=Φ -Φ=-=0φa a a U I U ≈-
目前,LED显示屏专用驱动芯片生产厂家主要有TOSHIBA(东芝)、TI(德州仪器)、SONY(索尼)、MBI{聚积科技}、SITI(点晶科技)等。在国内LED显示屏行业,这几家的芯片都有应用。 TOSHIBA产品的Xing价比较高,在国内市场上占有率也最高。主要产品有TB62705、TB62706、TB62725、TB62726、TB62718、TB62719、TB62727等。其中TB62705、TB62725是8位源芯片,TB62706、TB62726是16位源芯片。TB62725、TB62726分别是TB62705、TB62706的升级芯片。这些产品在电流输出误差(包括位间和片间误差)、数据移位时钟、供电电压以及芯片功耗上均有改善。作为中档芯片,目前”TB62725、TB62726已经逐渐替代了TB62705和TB62706。另外,TB62726还有一种窄体封装的TB62726AFNA芯片,其宽度只有6.3mm(TB62706的贴片封装芯片宽度为8.2mm),这种窄体封装比较适合在点间距较小的显示屏上使用。需要注意的是,AFNA封装与普通封装的引脚定义不一样(逆时针旋转了90度)。TB62718、TB62719是TOSHIBA针对高端市场推出的驱动芯片,除具有普通恒流源芯片的功能外,还增加了256级灰度产生机制(8位PWM)、内部电流调节、温度过热保护(TSD)及输出开路检测(LOD)等功能。此类芯片适用于高端的LED全彩显示屏,当然其价格也不菲。TB62727为TOSHIBA的新产品,主要是在TB62726基础上增加了电流调节、温度报警及输出开路检测等功能,其市场定位介于TB62719(718)与TB62726之间,计划于2003年10月量产。 TI作为世界级的IC厂商,其产品Xing能自然勿用置疑。但由于先期对中国LED市场的开发不力,市场占有率并不高。主要产品有TLC5921、TLC5930和TLC5911等。TLC5921是具有TSD、LOD功能的高精度16位源驱动芯片,其位间电流误差只有±4%,但其价格一直较高,直到最近才降到与TB72726相当的水平。TLC5930为具有1024级灰度(10位PWM)的12位源芯片,具有64级亮度可调功能。TLC5911是定位于高端市场的驱动芯片,具有1024级灰度、64级亮度可调、TSD、LOD等功能的16位源芯片。在TLC5921和TLC5930芯片下方有金属散热片,实际应用时要注意避开LED灯脚,否则会因漏电造成LED灯变暗。 SONY产品一向定位于高端市场,LED驱动芯片也不例外,主要产品有CXA3281N和CXR3596R。CXA3281N是8位源芯片,具有4096级灰度机制(12位PWM)、256级亮度调节、1024级输出电流调节、TSD、LOD和LSD(输出短路检测)等功能。CXA3281N主要是针对静态驱动方式设计的,其最大输出电流只有40mA。CXA3596R是16位源芯片,功能上继承了CXA3281N的所有特点,主要是提高了输出电流(由40mA增加到80mA)及恒流源输出路数(由8路增加到16路)。目前CXA3281N的单片价格为1美元以上,CXA3596R价格在2美元以上。 MBI(聚积科技)的产品基本上与TOSHIBA的中档产品相对应,引脚及功能也完全兼容,除了恒流源外部设定电阻阻值稍有不同外,基本上都可直接代换使用。该产品的价格比TOSHIBA的要低10~20%,是中档显示屏不错的选择。MBI的MBl5001和MBl5016分别与TB62705和TB62706对应,MBl5168千口MBl5026分另(j与TB62725禾口TB62726对应。另外,还有具有LOD功能的其新产品MBl5169(8位源)、MBl5027(16位源)、64级亮度调节功能的MBl5170(8位源)和MBl5028(16位源)。带有LOD及亮度调节功能的芯片采用MBI公司的Share-I-OTM技术,其芯片引脚完全与不带有这些功能的芯片,如MBl5168和MBl5026兼容。这样,可以在不变更驱动板设计的情况下就可升级到新的功能。
教务管理系统课程 设计报告
教务综合管理系统设计报告 专业:软件工程 成员:车振军陆建伟 徐蕾杨思倩指导老师:徐明 日期: -6-15
一、引言 1.1 目的 为了保证项目小组能够按时完成小组任务及目标,便于项目小组成员更好地了解项目情况,使项目小组开展的各个过程合理有序,因此确定各个项目模块的开发情况和主要的负责人,供各项目模块的负责人阅读,做到及时协调,按步有序进行项目的开发,减少开发中的不必要损失。 预期的读者是设计人员、开发人员、项目管理人员、测试人员和用户。 1.2 背景 高校教务管理工作是高等教育中的一个极为重要的环节,是整个院校管理的核心和基础。面对种类繁多的数据和报表,手工处理方式已经很难跟上现代化管理的步伐,随着计算机及通讯技术的飞速发展,高等教育对教务管理工作提出了更高的要求。尽快改变传统的管理模式,运用现代化手段进行科学管理,已经成为整个教育系统亟待解决的课题之一。 教务管理系统是一个大型复杂的计算机网络信息系统,满足各类高校现在和将来对信息资源采集、存储、处理、组织、管理和利用的需求,实现信息资源的高度集成与共享,实现信息资源的集中管理和统一调度。为各级决策管理部门提出准确、及时的相关信息和快捷、方便、科学的决策分析处理系统;为信息交流、教务管理提供一个高效快捷的电子化手段;最终达到进一步
提高各级领导科学决策水平,提高各院系、各部门管理人员管理水平与办公效率,减轻工作负担的目的。 教务管理系统面向管理员、教师和全校学生,实现学生管理、教师管理、课程管理、成绩处理。 1.3 定义 1.3.1 MySQL MySQL是一个关系型数据库管理系统,由瑞典MySQL AB 公司开发,当前属于 Oracle 旗下公司。MySQL是一种关联数据库管理系统,关联数据库将数据保存在不同的表中,而不是将所有数据放在一个大仓库内,这样就增加了速度并提高了灵活性。 MySQL所使用的 SQL 语言是用于访问数据库的最常见标准化语言。MySQL 软件采用了双授权政策,它分为社区版和商业版,由于其体积小、速度快、总体拥有成本低,特别是开放源码这一特点,一般中小型网站的开发都选择 MySQL 作为网站数据库。1.3.2 MyEclipse MyEclipse,是在eclipse 基础上加上自己的插件开发而成的功能强大的企业级集成开发环境,主要用于Java、Java EE以及移动应用的开发。MyEclipse的功能非常强大,支持也十分广泛,特别是对各种开源产品的支持相当不错。 二、需求分析 2.1 功能需求 2.1.1 系统目标
液晶显示器常用通用驱动板 2009-12-31 18:22 1.常用“通用驱动板”介绍 目前,市场上常见的驱动板主要有乐华、鼎科、凯旋、华升等品牌。驱动板配上不同的程序,就驱动不同的液晶面板,维修代换十分方便。常见的驱动板主要有以下几种类型: (1) 2023 B-L驱动板 2023B-L驱动板的主控芯片为RTD2023B,主要针对LVDS接口设计,实物如图1所示。 图1 2023B-L驱动板实物 该驱动板的主要特点是:支持LVDS接口液晶面板,体积较小,价格便宜。主要参数如下: 输入接口类型:VGA模拟RGB输入; 输出接口类型:LVDS; 显示模式:640×350/70Hz~1600×1200/75Hz; 即插即用:符合VESA DDC1/2B规范; 工作电压:DC 12V±1.0V,2~3A; 适用范围:适用于维修代换19in以下液晶显示器驱动板。 2023B-L驱动板上的VGA输入接口各引脚功能见表2,TXD、RXD脚一般不用。
表2 VGA插座引脚功能 2023B-L驱动板上的按键接口可以接五个按键、两个LED指示灯,各引脚功能见表3。 表3 2023B-L驱动板上的按键接口引脚功能 2023B-L驱动板上的LVDS输出接口(30脚)引脚功能见表4。 表4 2023B-L驱动板LVDS输出接口各引脚功能 2023B-L驱动板上的高压板接口引脚功能见表5。
表5 2023B-L驱动板上的高压板接口引脚功能 (2)203B-L驱动板 2023B-L主要针对TTL接口设计,其上的LVDS接口为插孔,需要重新接上插针后才能插LVDS插头。2023B-T驱动板实物如图6所示。 图6 2023B-T驱动板实物图 2023B-T驱动板体积比2023B-L稍大,价格也相对高一些,其主要参数如下: 输入接口类型:VGA模拟RGB输入; 输出接口类型:TTL; 显示模式:640×350/70Hz~1280×1024/75 Hz: 即插即用:符合VESA DDC1/2B规范; 工作电压:DC 12V±1.0V,2~3A; 适用范围:适用于维修代换20in以下液晶显示器的驱动板。 2023B-T驱动板的VCA输入接口、按键接口、LVDS输出接口、高压板接口引脚功能与前面介绍的2023B-L驱动板基本一致。
第四章数控机床的驱动与控制系统 第一节位移、速度、位置传感器 数控机床若按伺服系统有无检测装置进行分类,可分为开环系统和闭环(或半环)系统。也就是说检测装置是闭环(半闭环)系统的重要部件之一,它的作用是测量工作实际位移并反馈送至数控装置,使工作台按规定的路径精确移动。因此对于闭环系统来说,检测装置决定了它的定位精度和加工精度。数控机床对检测装置的主要要求为: (1)工作可靠,抗干扰性强; (2)使用维护方便,适应机床的工作环境; (3)满足精度和速度的要求; (4)成本低。 通常,数控装置要求位置检测的分辨率为0.001~0.0lmm;测量精度为±0.002~±0.02mm/m,能满足数控机床以1~l0m/min的最大速度移动. 位置检测装置的分类列表于4-1中。本章仅就其中常用的检测装置(旋转变压器感应同步器光栅、磁栅、编码盘)的结构和原理予以讲述。 旋转变压器
是一种常用的转角检测元件,由于它结构简单,工作可靠,且其精度能满足一般的检测要求,因此被广泛应用在数控机床上。 工作原理 当转子绕组的磁轴与定子绕组的磁轴自垂直位置转动一角度θ时,绕组中产生的感应电势应为 E1=nV1sinθ =nV m sinωt sinθ 式中n——变压比; V1——定子的输入电压; V m——定子最大瞬时电压。 当转子转到两磁轴平行时(即θ=90o),转子绕组中感应电势最大,即 E1=nV m sinωt 旋转变压器的应用 V3=nV m sinωt sinθ1 + nV m cosωt cosθ1 =nV m cos(ωt –θ1) ?感应同步器 感应同步器是一种电磁式位置检测元件,按其结构特点一般可分为直线式和旋转式两种。直线式感应同步器由定尺和滑尺组成;旋转式感应同步器由转子和定子组成。前者用于直线位移的测量,后者用于角度位移的测量。 它们的工作原理都与旋转变压器相似。感应同步器具有检测精度高、抗干扰性强、寿命长、维护方便、成本低、工艺性好等优点,广泛应用于高精度的数控机床。本节主要以直线式感应同步器为例,对其结构特点和工作原理进行讲述。
课 程 设 计 报 告 书 专 用 纸 1 引言(或绪论)(可作为正文第1章标题,用小3号黑体,加粗, 并留出上下间距为:段前0.5行,段后0.5行) ×××××××××(小4号宋体,20磅行距)××××××××××××××××××××××××××××××………… 1.1 ××××××(作为正文2级标题,用4号黑体,加粗) ×××××××××(小4号宋体,20磅行距)×××××××××××××××××××××××××××××××………… 1.1.1 ××××(作为正文3级标题,用小4号黑体,不加粗) ×××××××××(小4号宋体,20磅行距)×××××××××××××××××××××××××××………… 2 ×××××××(作为正文第2章标题,用小3号黑体,加粗, 并留出上下间距为:段前0.5行,段后0.5行) ×××××××××(小4号宋体,20磅行距)×××××××××××××××××××××××××××××××××××………… ×××××××××××××××××××………… ………… 注:1.正文中表格与插图的字体一律用5号宋体; 2.正文各页的格式请以此页为标准复制。 请留出一个汉字的空间,下同
报告中的内容仅为参考字体格式,与本次设计无关! 题目 内部排序教学软件。 1需求分析和说明 内部排序教学软件的总体目标:在TURBO C2.0 的开发环境下,利用所学C语言和数据结构的相关知识,开发一个具有良好人机界面的内部排序教学软件,实现各种内部排序,并能使用户通过其显示结果对每种排序方法的性能有一个直观的了解,从而达到教学的目的。 1.1基本要求 (1)界面友好,易与操作。采用菜单或其它人机对话方式进行选择。 (2)实现各种内部排序。包括冒泡排序,直接插入排序,直接选择排序,希尔排序,快速排序,堆排序。 (3)待排序的元素的关键字为整数。可用随机数据和用户输入数据作测试比较。比较的指标为有关键字参加的比较次数和关键字的移动次数(关键字交换以3次计)。 (4)演示程序以人机对话的形式进行。每次测试完毕显示各种比较指标 的列表,以便比较各种排序的优劣。 1.2各功能模块的功能描述: 1.主函数模块 本模块的主要功能是初始化图形界面,调用各模块,实现软件功能。 2.排序功能及输出子模块 本模块的主要功能是根据用户的选择进行数组的创建,并对输入数据或者随机产生的数据使用六种排序方法进行排序并统计每种方法的移动次数和比较次数,然后输出以表格形式输出。 3.封面和结束画面子模块 本模块的主要功能是当用户打开本软件时模拟软件加载,延时数秒后关闭,并进入图形界面,在用户退出软件时显示结束画面,延时数秒后关闭程序。 4.图形界面子模块 本模块的主要功能是根据用户的选择显示不同的画面,引导用户使用软件所提供的各种功能,并在用户提供必要数据,并选择排序功能时调用排序模块,并显示结果画面。 5.输入子模块 本模块的主要功能是进行光标定位,输出提示文字,并对用户输入数据进行处理,创建数组。 6.鼠标实现模块 本模块的主要功能是为用户提供鼠标操作支持,使用户能使用鼠标进行功能的选择。2详细设计
电机驱动控制系统 摘要 由于单片机具有体积小、集成度高、运算速度快、运行可靠、应用灵活、价格低廉以及面向控制等特点,因此在工业控制、数据采集、智能仪器仪表、智能化设备和各种家用电器等领域得到广泛的应用,而且发展非常迅猛。随着单片机应用技术水平不断提高,目前单片机的应用领域已经遍及几乎所有的领域。 与交流电动机相比,直流电机结构复杂、成本高、运行维护困难,但是直流电机具有良好的调速性能、较大的启动转矩和过载能力强等许多优点,因此在许多行业仍大量应用。近年来,直流电动机的机构和控制方式都发生了很大的变化。随着计算机进入控制领域以及新型的电力电子功率元器件的不断出现,采用全控型的开关功率元件进行脉宽调制(Pulse Width Modulation,简称PWM)已成为直流电机新的调速方式。这种调速方法具有开关频率高、低速运行稳定、动态性能良好、效率高等优点,更重要的是这种控速方式很容易在单片机控制系统中实现,因此具有很好的发展前景。 本设计为单片机控制直流电机,以AT89C51单片机为核心,采用了PWM技术对电机进行控制,通过对占空比的计算达到精确调速的目的。由键盘控制电动机执行启停、速度和方向等各种功能,用红外对管测量电机的实际转速,并通过1602液晶显示出控制效果。设计上,键盘输入采用阵列式输入,用4*4的矩阵键盘形式,这样可以有效的减少对单片机I/O口的占用。
关键词:AT89C51 PWM 电机测速 一、硬件设计 1、总体设计
20 929303456781011121314151617318RFB 91112 10k 23
1918 2122232425262728 1.2.2 1602液晶显示模块 本模块实现了转速等显示功能。 D :方向;占空比;预设转速;实测速度; 1.2.3键盘模块 根据实验要求,需由按键完成对直流电机的控制功能,并经分 析得出需要16个按键,为节省I/O 口并配合软件设计,此模块使用了4*4的矩阵模式。并通过P1口与主机相连。 1.2.4 PWM 驱动电路模块设计与比较